Левшин Г.Е. Управление техническими системами
Подождите немного. Документ загружается.

21
8. Режимы и характеристики работы САР и САУ
Как всякие динамические системы, САР и САУ могут работать в двух основных режимах:
установившемся и неустановившемся.
8.1. Установившийся режим
Работа объекта регулирования характеризуется совокупностью многих параметров (координат),
отражающих те или иные его свойства, например: мощность генератора, его крутящий момент, частота
вращения ротора, к.
п.д., положение органа управления и т.п.
Режим работы объекта регулирования называется установившимся, если числовые значения всех
координат сохраняются постоянными во времени. Такая работа объекта в установившемся режиме
возможна лишь при выполнении ряда условий. Эти условия могут быть выражены уравнениями
статического равновесия.
Например: 1. Ротор турбины может сохранять постоянство частоты вращения
только при условии
равенства крутящего момента турбины
M
и момента сопротивления
c
M
потребителя:
0
=
−
с
ММ
.
2. Уровень
H
жидкости в резервуаре останется постоянным во времени лишь при условии равенства
поступления
Q
жидкости и расхода
G
её из резервуара, т.е.
0
=
−
GQ
.
3. Температура
T
в холодильной камере останется постоянной во времени при выполнении условия
0=−
рп
QQ
, где
п
Q
и
р
Q
соответственно количество теплоты, поступающей в камеру через её стенки и от
охлаждаемого продукта, и отбираемой от камеры системой охлаждения, Дж/ч.
8.2. Фактор устойчивости
Рассмотрим статические характеристики холодильной камеры, определяющие зависимость количества
поступающей
п
Q
и отбираемой теплоты
р
Q
от температуры
T
в камере (рис. 8.1). График показывает, что
условие
0=−
рп
QQ
выполняется только в точке
О
. Поэтому в камере будет поддерживаться
установившийся тепловой режим при температуре
о
Т
. Однако режим работы камеры с течением времени
может изменяться, например, при загрузке в камеру новой порции продукта или выгрузке (или по другим
причинам).
Нарушение установившегося режима вызовет отклонение температуры
T
в камере от её значения
о
Т
на
Т∆
. Пусть это отклонение будет в сторону увеличения
р
Q
(загрузка камеры). Тогда
QQQ
пр
∆=≠− 0
, а
р
Q
>
п
Q
. В связи с этим температура в камере будет уменьшаться, и установившийся
режим при
0
T
восстановится. При уменьшении температуры на
Т
∆
, наоборот,
п
Q
>
р
Q
, и установившийся
режим при
0
T
также восстановится. Такой установившийся режим называется устойчивым.
Устойчивость режима зависит от дисбаланса тепловых потоков при данном отклонении температур от
о
Т
. Поэтому оценкой устойчивости может служить отношение
T
Q
F
∆
∆
=
, называемое фактором
устойчивости (в данном случае холодильной камеры).
Аналогично может быть определена устойчивость режимов и других объектов. Например,
устойчивость регулирования уровня жидкости в резервуаре определяется как
H
GQ
F
∆
−
=
)(
.

22
Так как в общем случае тепловые потоки
п
Q
и
р
Q
(и подобные величины) могут зависеть не только от
температуры внутри камеры, но и других величин, то для более точного определения фактора устойчивости
пользуются частными производными. Тогда
Устойчивость установившегося режима характеризуется алгебраическим знаком
F
и его числовым
значением. Если
T
Q
p
∂
∂
>
T
Q
n
∂
∂
, то
F
0>
и режим устойчив, причём тем более устойчив, чем больше
значение
F
. При
0<F
режим работы неустойчив. В этом случае рассматриваемый объект имеет
отрицательное самовыравнивание.
8.3. Неустановившийся режим
Значительную часть рабочего времени многих САР составляют такие режимы работы, которые
являются следствием смены нагрузки со стороны потребителей или других внешних возмущений. При этих
режимах нарушается постоянство во времени значений тех или иных координат, характеризующих
состояние
объекта. Эти режимы называют неустановившимися.
Например, нарушение теплового баланса холодильной камеры приводит к изменению температуры
этой системы в соответствии с дифференциальным уравнением
рп
QQ
t
T
C −=
∂
∂
, где
С
– теплоёмкость
системы охлаждения. Часто при оценке неустановившихся режимов рассматривают не все изменяющиеся
координаты, а только несколько (или одну) главных.
8.4. Понятие о переходных процессах
Переходным процессом называется процесс изменения во времени координат объекта вследствие
изменения нагрузки, смены регулируемого режима обслуживающим персоналом или других произвольных
изменений внешних условий работы. Переходный процесс
по своему смыслу всегда является переходом от
одного (начального) установившегося режима к другому (конечному) установившемуся режиму. Конечный
установившийся режим часто является режимом вновь заданным. Переходный процесс всегда протекает во
времени, и его аргументом является время.
Каждая точка графика переходного процесса представляет собой неустановившийся режим в данный
момент времени, а сам переходный
процесс – последовательная во времени совокупность
неустановившихся режимов. Каждый переходный процесс можно рассчитать с той или иной степенью
точности путём составления и решения дифференциального уравнения исследуемой системы. Для сложных
систем сначала составляют и решают дифференциальные уравнения отдельных её элементов, а затем на их
основе для системы в целом. Решение такого уравнения
даёт общий интеграл в виде зависимостей
)(tf
=
Ω
,
)(tfT =
или других, являющихся математическими выражениями переходных процессов.

23
Например, переходный процесс теплоэнергетической установки от одной скорости вращения
1
Ω
к
другой
2
Ω
изображается графиком
)(tf
=
Ω
, где
∆
Ω
– область допустимых отклонений от заданного
значения в новом установившемся режиме;
рег
t
– время переходного процесса (время регулирования) (рис.
8.2). Существуют и другие виды переходных процессов и их графиков.
9. Математическое описание САУ
9.1. Понятие об элементах и звеньях САУ
Любая система (САР или САУ) может рассматриваться в виде совокупности отдельных связанных
между собой элементов (чувствительных, промежуточных и исполнительных) автоматики,
взаимодействующих друг с другом и объектом управления. Разбиение САУ на элементы позволяет
составлять функциональные схемы САУ, по которым рассматривают принцип
действия и аппаратный
состав САУ.
Для количественного исследования процессов, происходящих при автоматическом управлении, нужны
уравнения, описывающие САУ. Ввиду сложности современных САУ эти уравнения очень сложны и
громоздки. Поэтому часто судят о работе всей САУ по уравнениям её отдельных элементов. Однако и эти
уравнения довольно громоздки и трудно решаемы. Для математического
описания работы САУ удобно
разбивать их не на элементы автоматики, а на динамические звенья.
Динамическим звеном называется часть САУ, описываемая дифференциальным или иным уравнением
определённого вида. В отличие от элемента автоматики динамическое звено отнюдь не обязательно
является конструктивно или схемно оформленным устройством. Это могут быть отдельные части элементов
автоматики и объектов
управления (обмотки возбуждения электрических генераторов, якорные обмотки
электродвигателей, отдельные каскады усилителей и т.д.). Иногда динамические звенья не имеют
физического смысла и характеризуют лишь математические зависимости между некоторыми величинами
САУ. Всё многообразие конструктивных воплощений динамических звеньев сводится к немногим более
десяти типовых (см. п. 9.6).
9.2. Основы математического описания САУ
1. Математическое
описание (модель) необходимо для проектирования (синтеза) САУ и анализа ее
свойств и работы, особенно при переходном процессе. Оно обычно состоит из совокупности
математических описаний (уравнений) каждого входящего в САУ элемента или динамического звена.
Различают физические (или натурные) и математические модели. Математические модели бывают трех
типов: детерминированные, статистические (стохастические), адаптивные.
Детерминированные
модели объектов рассматривают обычно в виде передаточных функций W(s).
Статистические модели характеризуются набором статистических параметров и функций распределения.
При этом используют методы математической статистики, корреляционный, дисперсионный и
регрессионный анализ. Адаптивные модели используют для объектов с недостаточной априорной
информацией о его свойствах. Применяют и комбинированные модели – детерминированно-стохастические,
детерминированно-адаптивные и
другие.
Статистические и адаптивные модели получают с применением активных и пассивных методов
идентификации и, соответственно, планирования эксперимента.
При получении математического описания исходят из противоречивых требований: оно должно как
можно полнее отражать свойства реальной САУ, но быть по возможности простым, чтобы не усложнять
исследование.
Для этого используют один из двух путей:

24
а) получение системы дифференциальных уравнений на основе аналитического анализа процессов,
проходящих в САУ (физических, математических и т.п.), или эксперимента;
б) получение косвенных оценок динамических процессов, к которым относят передаточные функции,
временные и частотные характеристики.
2. Описание процессов с помощью дифференциальных уравнений является основным математическим
аппаратом линейных детерминированных САУ, т.к.
большинство их физических элементов обладают
свойством в одни моменты времени накапливать, а в другие моменты отдавать энергию и (или) различные
вещества. Примером является процесс резания, сопровождающийся упругими деформациями элементов
технологической системы при наличии трения и инерционных масс.
Математическое описание динамики САУ обычно производится путем составления системы
дифференциальных (иногда интегро-дифференциальных) уравнений
, которые могут быть линейными и
нелинейными. Строго говоря, любая реальная динамическая система является нелинейной. Однако
большинство непрерывных систем управления могут быть линеаризированы, т.е. заменены приближенно
эквивалентными системами, переходные процессы в которых описываются обыкновенными линейными
дифференциальными уравнениями с постоянными коэффициентами. Эти уравнения решаются легче
нелинейных. Обычная линеаризация возможна, если функция,
описывающая нелинейную зависимость,
является гладкой.
Линеаризация исходных систем основана на методе малых отклонений от некоторых значений,
соответствующих характерным режимам работы (например, установившимся режимам). Составление и
линеаризацию уравнений обычно проводят по отдельным звеньям (а не по всей САУ), разлагая в ряд
Тейлора непрерывную аналитическую функцию, связывающую переменные звеньев и их производные, и
отбрасывая члены второго и высших порядков малости, получают линейное уравнение звена.
Геометрически линеаризация нелинейной зависимости между двумя переменными x и y (рис. 9.1, а)
означает замену исходной кривой АВ отрезком касательной СД к АВ в точке С, соответствующей
заданному режиму и переносу начала координат в эту точку с координатами (х
о
, у
о
).
3. Линейные и линеаризованные САУ часто описывают дифференциальным уравнением первого
порядка вида:
где φ и ψ - коэффициенты, являющиеся известными функциями от dy/dx.
Это уравнение носит имя французского математика Лагранжа и является линейным относительно y и x.
Его интегрирование проводят с помощью вспомогательного параметра p, когда
рy =
′
и уравнение
записывается в виде
)()( ррxy
ψ
ϕ
+=
. В результате получают общий интеграл (соотношение) в виде
Ф(x, y, C)=0, не разрешенный относительно y. Разрешив это соотношение относительно y, получают общее
решение в неявном виде. Придав произвольному постоянному C определенное значение, например, C=C
o
,
получают соотношение Ф(x, y, C
o
)=0, называемое частным интегралом уравнения.
4. Описание процессов через передаточные функции
Дифференциальное уравнение звена САУ в общем виде записывается как:
где y и x – выходная и входная величины звена, соответственно (в отклонениях от состояния
равновесия);
оmmоnn
bbbbaaaа ,,...,,,,...,
1111 −−
- постоянные коэффициенты, определяемые
конструктивными особенностями и параметрами звена.
Уравнение (9.2) и подобные ему еще называют уравнением в переменных вход-выход.

25
Аналитическое решение такого уравнения весьма трудоемко. Поэтому широко используют средства
описания динамических свойств системы через преобразование Лапласа, которое существенно облегчает
исследование сложных систем, заменяя дифференциальные уравнения алгебраическими. При этом легко
учитываются начальные условия и устраняются сложности вычисления постоянных интегрирования.
Преобразования Лапласа осуществляют заменой в уравнении (9.2) функции времени y(t) и x(t) функциями
y(s) и x(s) комплексного переменного s с помощью интеграла Лапласа:
В результате получают линейное алгебраическое уравнение (записанное в операторной форме),
которое равносильно предыдущему (9.3)
где s - оператор.
Функцию y(s) называют изображением функции y(t), а функцию y(t) - оригиналом функции y(s). Они
могут преобразовываться друг в друга. При этом переход от оригинала функции y(t) к ее изображению y(s)
называют прямым преобразованием Лапласа и записывают символом L[y(t)]=y(s). Переход же от
изображения y(s) к оригиналу функции y(t) называют
обратным преобразованием Лапласа и записывают как
L
-1
[y(s)]=y(t). Особо отметим, что практически переход от дифференциального уравнения к
алгебраическому происходит без каких-либо вычислений.
Действительно, переход от дифференциального уравнения (9.2) к алгебраическому операторному
уравнению (9.4) осуществляют путем замены символов дифференцирования оригиналов функций
dt
d
dt
d
n
n
,...
соответственно символами s
n
,…s и функций y(t) их изображениями y(s). При этом выполняют
начальное условие, когда для t=0 значения самой функции y(t) и всех производных равны 0. С оператором s
можно, как и с другими членами алгебраического уравнения, производить различные действия (умножение,
деление, вынесение за скобки и т.д.). Это значительно упрощает все расчеты.
Еще
более упрощает вычисления введение понятия передаточной функции системы (элемента, звена).
Она определяется следующим образом. Вынесением в уравнении (9.4) y(s) и x(s) за скобки получим:
Если определить из уравнения (9.5) отношение изображения выходной величины y к изображению
входной величины x, то получим передаточную функцию системы W(s):
где d
о
(s) - оператор левой части уравнения по выходной величине, а K
о
(s) - оператор правой части по
входной величине.
Аналогично определяют передаточные функции элемента и звена. Выражение (9.6) получено как:
Из уравнения (9.6) следует, что y(s)=W(s)x(s).
5. Виды математических моделей и стандартные формы записи дифференциальных уравнений
5.1. Первая стандартная форма записи наиболее применимых линейных детерминированных
дифференциальных уравнений не выше второго порядка с постоянными коэффициентами заключается в
следующем.
Члены, содержащие выходную величину y и ее производные, записывают в левой части уравнения, а
все
остальные члены – в правой. Коэффициент же при выходной величине y делают равным единице
делением обоих частей уравнения на коэффициент при этом члене. Если в правой части содержатся другие
производные, то члены, содержащие какую-либо входную величину и ее производные, объединяют в одну
группу и коэффициент при соответствующей входной величине выносят за
скобки:
Вынесение b
0
/a
0
за скобки стало возможным при умножении члена
.
01
)/( xab
на
.1/
00
=bb

26
У коэффициентов при производных их степень совпадает с порядком производной и они имеют размерность
времени. Поэтому их называют постоянными времени Т, т.е.
Коэффициенты же
o
o
a
b
K =
1
и
o
o
a
c
K =
2
называют передаточными. В результате таких действий и прямого преобразования Лапласа получают
первую стандартную форму записи уравнения в переменных вход-выход через постоянные времени и
передаточные коэффициенты
5.2. Вторая стандартная форма записи дифференциального уравнения в переменных вход-выход
через передаточные функции W(s) будет показана в следующем примере.
5.3. Третья стандартная форма записи применяется относительно переменных состояния, когда САУ
описывается векторно-матричным дифференциальным уравнением:
где А – квадратичная матрица коэффициентов
nn
AA ...
11
; В – матрица управления
nk
BB ...
11
; С –
матрица выхода
mn
CC ...
11
; D – матрица обхода системы
mk
DD ...
11
;
k
u
– вектор величин (
k
u
и
s
g
);
n
x
– n-
мерный вектор состояния САУ;
m
y
– n-мерный вектор управляемых (выходных, наблюдаемых) величин.
6. Модели динамических управляемых объектов и дифференциальные уравнения типовых управляемых
процессов и технических объектов.
Пример 1. Резервуар с жидкостью (рис. 2.2, 4.4, 9.2) является регулируемым объектом по уровню H
жидкости, постоянство которой необходимо в паровых котлах, поплавковых камерах карбюраторов и др.
Это постоянство поддерживается в установившемся режиме при
выполнении условия равенства
поступления массы жидкости m
П
(притока Q) в единицу времени и расхода массы жидкости m
П
(расхода G),
называемом условием статического равновесия m
п
- m
p
=0. (9.10)
При нарушении этого условия обе части уравнения получают в общем случае не равные одно другому
приращения, поэтому масса m жидкости в резервуаре изменится так, что
При неизменной площади S поперечного сечения резервуара и плотности ρ жидкости с учетом того,
что m=ρSH получим дифференциальное уравнение объекта
В полученном уравнении H=H
о
+∆H, m
П
=m
ПО
+∆m
П
, m
p
=m
po
+∆m
p
, поэтому
Приток жидкости m
П
в резервуар определяется ее уровнем Н и положением h органа управления (рис.
9.2), поэтому при постоянном давлении жидкости перед органом управления
Расход же жидкости m
p
также зависит от уровня Н, но и от нагрузки N, которая определяется
изменением потребности в жидкости у потребителя, т.е.
Разложение полученных зависимостей в ряд Тейлора и последующая линеаризация дают
Подстановка этих значений ∆m
п
и ∆m
p
в уравнение (9.13) дает дифференциальное уравнение в
переменных вход-выход, включающее все перечисленные параметры этой САУ

27
где
p
n
p
F
H
m
H
m
=
∂
∂
−
∂
∂
– фактор устойчивости САУ.
После введения относительных координат
,
о
H
H∆
=
ϕ
о
h
h∆
=
χ
,
о
N
N∆
=
α
и деления членов уравнения на произведение
оp
HF
уравнение получает первый стандартный вид
где
p
о
F
S
T
ρ
=
– постоянная времени; С,
оp
о
П
о
HF
h
h
m
∂
∂
=
χ
κ
и
оp
о
p
о
HF
N
N
m
∂
∂
=
α
κ
– безмерные коэффициенты усиления (операторы) по
соответствующим входным координатам.
В полученном уравнении правая часть представляет собой входное возмущающее воздействие, а левая
– собственные динамические свойства объекта. Частные производные расхода и притока жидкости
определяют аналитически или графически по экспериментальным или расчетным характеристикам. Но при
построении характеристик, изменяют только параметр, по которому берется
производная.
В операторной стандартной форме дифференциальное уравнение резервуара получает вид:
где d
o
(s)=T
o
s+1 – собственный оператор объекта. Из этого уравнения получают передаточные функции
этого объекта по каждой из выходных координат
Тогда уравнение можно представить в форме
С его помощью можно построить структурную схему объекта (рис. 9.3):
Если раскрыть значения W(s)
χ
и W(s)
α
, то она изобразится как (рис. 9.4):
Пример 2. Задачей системы автоматического регулирования холодильной камеры (рис. 9.5) является
поддержание в заданных пределах температуры T внутренней полости камеры 1. Подвод теплоты

28
холодильную камеру осуществляется, во-первых, за счет разности температуры окружающей среды и
температуры внутри камеры T и, во-вторых, за счет разности температуры охлаждаемых предметов,
загружаемых в холодильную камеру, и температуры T.
Как известно, количество теплоты, поступившее в холодильную камеру в единицу времени,
определяется количеством теплоты
)(
1
TfQ
П
=
, проникающей через стенки, и
)(
2
NfQ
П
=
, вносимой
охлаждаемым грузом, причем под N понимается количество охлаждаемого груза и его тепловое состояние.
Таким образом,
Отвод теплоты Q
p
из камеры осуществляется с помощью криогенного агента, благодаря разности
температур камеры T и криогенного агента T
x
:
).;(
xР
TTfQ
=
Средняя температура криогенного агента в испарителе определяется температурой на входе в
испаритель 3 и его расходом. Если принять условия на входе постоянными, то расход агента через
испаритель будет зависеть только от положения h органа управления расходом агента (это может быть
пускатель компрессора при дискретной работе установки, орган управления частотой вращения вала
компрессора при непрерывной подаче криогенного агента).
Условно орган управления изображен в виде дроссельной заслонки 2 (рис. 9.5).
Таким образом,
);( hTfQ
p
=
. При нарушении установившегося режима работа камеры характеризуется
уравнением:
Полученные функциональные зависимости дают возможность найти приращения ∆Q
П
и ∆Q
p
, входящие
в уравнение (9.21). После разложения их в ряд и последующей линеаризации получаем:
Подстановка этих выражений в уравнение (9.21) приводит последнее к виду:
В полученном уравнении F
x
– фактор устойчивости холодильной камеры, определяемый разностью
Производная
0<
∂
∂
h
Q
p
,

29
так как положительным является направление перемещения h в сторону увеличения T, т. е. в сторону
закрытия дроссельной заслонки.
После перехода к относительном координатам
ϕ
=∆T/T
0
, a
0
=∆N/N
0
и деления всех членов уравнения на
F
x
T
о
уравнение холодильной камеры записывается в форме:
где
x
n
о
F
C
T =
– постоянная времени объекта, характеризующая его инерционность:
безразмерные коэффициенты усиления по соответствующим выходным координатам.
Дифференциальное уравнение (9.22) холодильной камеры является линейным с постоянными
коэффициентами. Его можно записать в операторной форме:
где собственный оператор объекта
.1)(
+
=
pTsd
xо
После деления всех членов уравнения (9.23) на собственный оператор уравнение холодильной камеры
можно представить в виде:
где передаточные функции объекта по соответствующим входным координатам:
Уравнение (9.25) позволяет составить структурную схему холодильной камеры как регулируемого
объекта по температуре (рис. 9.6).
9.3. Передаточная функция элемента САУ и его структурная схема
На каждый элемент непрерывной линейной стационарной САУ могут воздействовать несколько
величин (координат)
k
u
r
,
s
g
r
,
r
f
r
, называемых также входными координатами. Но каждый элемент САР
выполняет свою функцию и поэтому, как правило, выдаёт одну выходную величину (координату)
y
r
.
Совместное воздействие входных координат на элемент может быть разделено (в соответствии с
принципом суперпозиции) на воздействие каждой входной координаты в отдельности. Тогда общее
дифференциальное уравнение, в которое входят все входные координаты, может быть заменено
несколькими с одной входной координатой каждое. В операторной форме записи это запишется как
где
k
u
k
0
,
s
g
k
0
,
r
f
k
0
– операторы воздействия по соответствующим входным координатам;
)(
0
sd
–
оператор воздействия по соответствующей выходной координате; s – комплексное число.
Изменение выходной координаты, например
k
u
y
r
, в зависимости от изменения входной величины
k
u
r
может быть определено как
k
u
u
u
sd
k
y
k
k
rr
)(
0
0
=
, где
)(
)(
0
0
SW
sd
k
k
u
=
– передаточная функция элемента, представляющая собой отношение
оператора воздействия к его собственному оператору.
Является постоянной величиной для каждого уравнения, получается в результате применения
преобразования Лапласа, полностью характеризует динамические свойства элемента САУ и его переходный
процесс.
Элемент САР имеет столько передаточных функций, сколько входных координат содержит его
дифференциальное уравнение. Запись дифференциального уравнения элемента через передаточные
функции даёт возможность построить структурную схему элемента, отражающую его динамические
свойства. Каждая передаточная функция в структурной схеме изображается прямоугольником, а входные и
выходные координаты – соответствующими стрелками. Внутри прямоугольника записываются их
передаточные функции. Круг, разделённый на четыре сектора, изображает суммирующий узел. Если к
сектору подводится суммируемая величина со знаком плюс, он не зачернён, а если со знаком минус, то
зачернён (рис. 9.7).
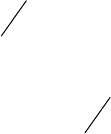
Пример. Графическое изображение структурной схемы системы регулирования скорости Ω вращения
электродвигателя постоянного тока (рис. 9.8).
30
9.4. Временные характеристики динамических звеньев
Динамические свойства линейных звеньев и САУ в целом могут быть описаны дифференциальными
уравнениями и представлены графическими характеристиками двух типов: временные, частотные.
Характеристики определяют экспериментально или по уравнению звена. По экспериментальным
характеристикам можно составить уравнение звена. Эти характеристики позволяют определить реакцию
звена или САУ на возмущения произвольного вида.
9.4.1. Временной характеристикой звена по какому-либо внешнему воздействию называется закон
изменения выходной величины
y
r
звена в функции времени при изменении внешнего воздействия
u
r
,
g
r
или
f
r
по определённому закону и при условии, что до приложения внешнего воздействия звено находилось в
покое. Обычно при определении временных характеристик звена по какому-либо внешнему воздействию,
например,
u
r
,
f
r
,
g
r
все другие внешние воздействия полагаются равными нулю.
Из временных характеристик звена наиболее распространены: 1) переходная функция звена
)(th
; 2)
функция веса
)(tw
.
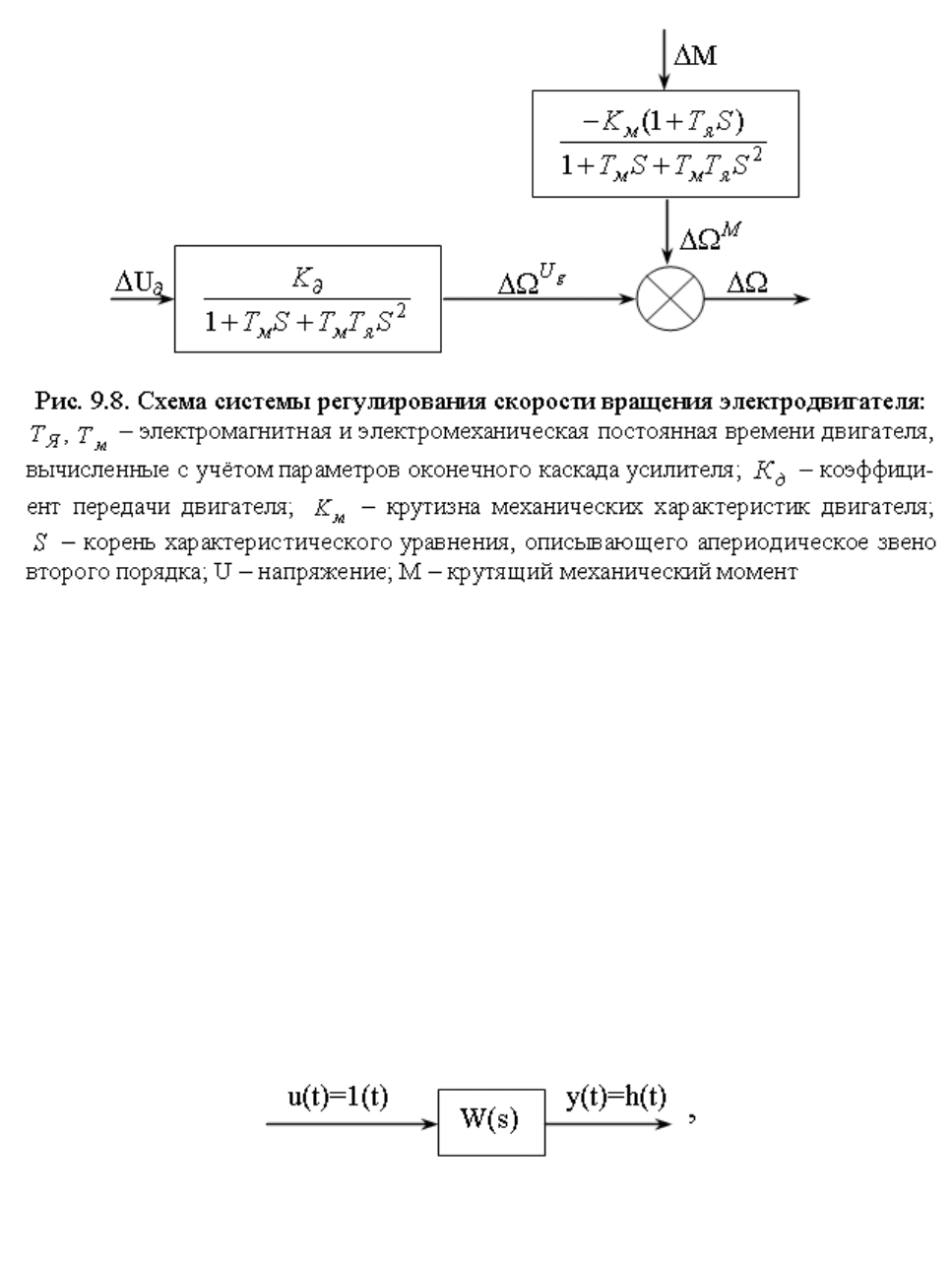
9.4.2. Переходной функцией звена
)(th
называется реакция звена на единичный ступенчатый входной
сигнал
)(1)( ttu =
при условии, что до приложения входного воздействия звено находилось в покое:
где
)(sW
– передаточная функция звена (рис. 9.9).
Ступенчатое воздействие – это мгновенный скачок нагрузки на вал двигателя: скачок температуры,
мгновенный поворот вала входной оси следящей системы и т. д. Оно является наиболее неблагоприятным
для САУ.