Лазарев Ю.Ф. Mатематическое моделирование физических процессов и технических систем в MATLAB
Подождите немного. Документ загружается.

351
set_param('Prov_DUE','PreLoadFcn','Prov_DUE_Pred')
set_param('Prov_DUE/MENU','OpenFcn','MENU_DUE')
set_param('Prov_DUE/GRAFIKI','OpenFcn','Graf_DUE')
После выполнения этих команд управление всеми действиями по моделированию будет осуществляться из
окна самой S-модели. Назовем эту модификацию S-модели
Prov_DUE1
.
Теперь моделирование можно производить в следующем порядке:
1) вызвать на экран окно блок-схемы
Prov_DUE1; при этом начальные значения исходных данных уже
будут записаны в рабочем пространстве, так как перед появлением окна блок-схемы будет запущена на
выполнение программа
Prov_DUE_Pred;
2) дважды щелкнуть в окне блок-схемы на блоке MENU (Исходные данные); появится окно меню (рис. 8.
21);
Рис. 8. 21. Меню пользователя программы MENU_DUE
3) пользуясь меню, установить нужные значения исходных параметров и закончить работу с меню, нажав
кнопку «Ничего не менять»;
4) запустить S-модель на моделирование, нажав значок «►» в линейке инструментов окна блок-схемы;
5) по окончании процесса моделирования для вывода графиков в графическое окно дважды щелкнуть на
блоке GRAFIKI (
Вывести графики).
Осуществление связи S-модели с известными m-файлами описанным способом, наверное, является, пожалуй,
наиболее удобным, так как, во-первых, позволяет вызвать m-файлы лишь в случае необходимости и в
произвольном порядке, а во-вторых, все управление моделированием и вызовом программ осуществляется
только из блок-схемы S-модели.
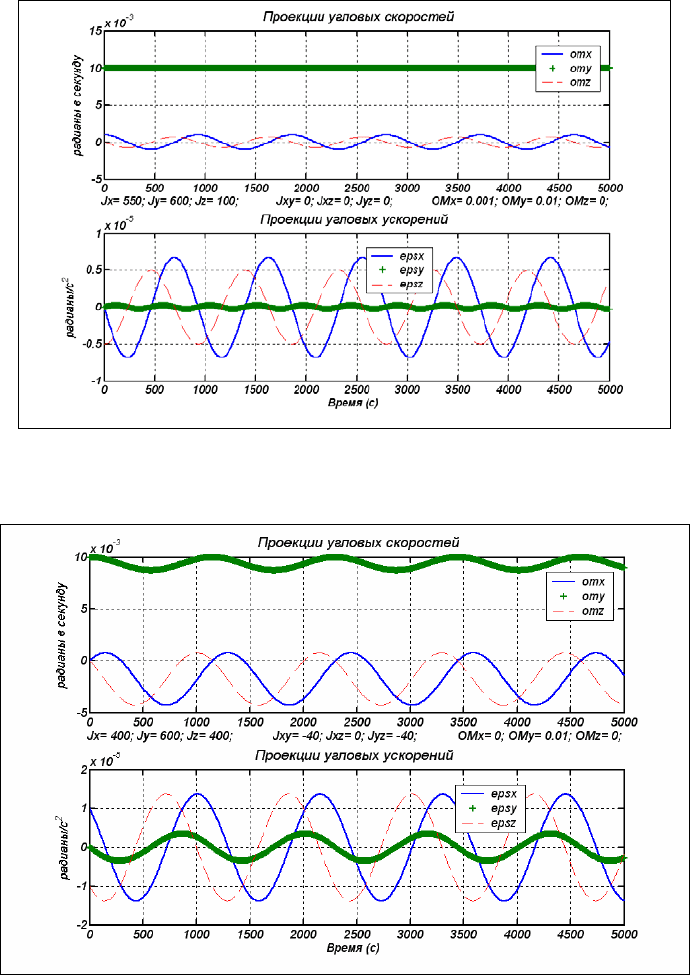
На рис. 8. 22…8.24 представлены результаты моделирования движения
тела при разных сочетаниях
параметров. Во всех случаях тело «раскручено» вокруг оси Y с угловой скоростью
радиан в
секунду. Первый случай соответствует динамически несимметричному телу (
, ),
имеющему начальную скорость вокруг оси X, равную
радиан в секунду.
01,0=
Y
ω
550=
X
J 150=
Z
J
001,0=
X
ω
352
Рис. 8. 22. Нутационные колебания несимметричного гироскопа
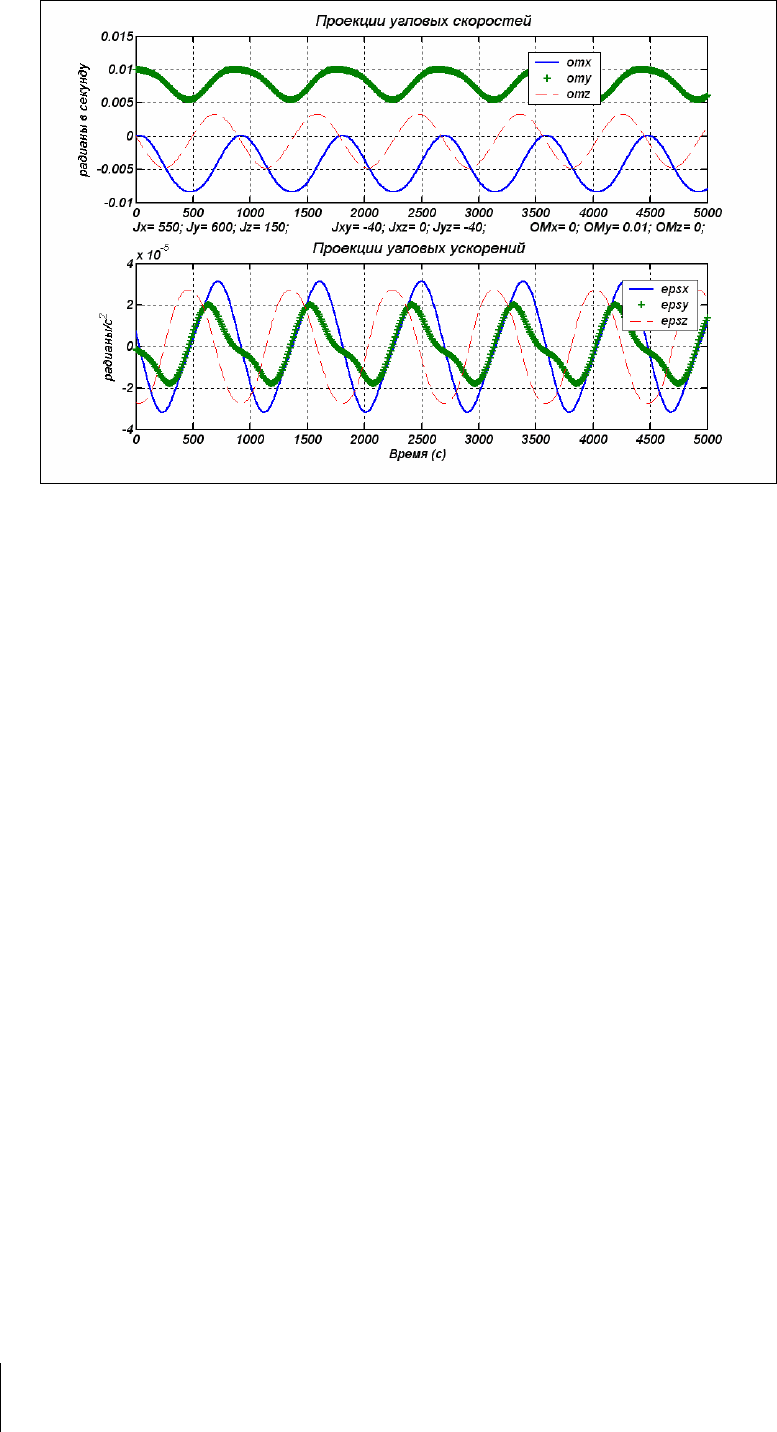
Рис. 8. 23. Свободное движение динамически несбалансированного гироскопа
Во втором случае тело является динамически несбалансированным относительно принятых осей и вращается в
начальный момент времени только вокруг оси Y.
Третий вариант соответствует случаю, когда тело и динамически несбалансировано, и осевые моменты инерции
значительно различаются по величине.
353
Рис. 8. 24. Свободное движение несимметричного и несбалансированного гироскопа
Как можно убедиться по этим экспериментам, вращательное движение тела существенно зависит от его
инерционных характеристик.
8.2. Создание библиотек S-блоков пользователя
Когда серьезный пользователь углубленно занимается моделированием систем, он неизбежно, рано или поздно,
соприкоснется с необходимостью подготовки собственных блоков, имеющих свойства стандартных
библиотечных блоков пакета
Simulink
. Потребность в этом возникает, когда пользователь при разных задачах
моделирования в собственной предметной области вынужден или неоднократно использовать элементарные
созданные ним блоки, которые являются оригинальными и не входят в состав стандартных библиотек
Simulink
, или использовать одни и те же блоки многократно в определенных устойчивых их соединениях. В
таких случаях время создания новой модели можно значительно сократить и при этом предотвратить
многочисленные ошибки, если оформить эти новые блоки или соединения блоков в виде новых блоков и
разместить их в библиотеке.
Преимущество использования собственных блоков
в составе библиотек состоит в следующем:
- их возможно использовать неоднократно путем перетягивания изображения блока из библиотеки в окно
блок-схемы модели;
- пользоваться ими удобнее всего, когда общение с ними осуществляется через специальные диалоговые
окна настраивания блоков, аналогичные тем, которые рассматривались при описании стандартных блоков
Simulink
.
Создание окон настраивания блоков осуществляется через так называемую маскировку блока, т. е. создание
маски блока.
8.2.1. Создание библиотеки
Рассмотрим процесс создания новой собственной библиотеки S-блоков на конкретных примерах.
Образование новой библиотеки начинается с вызова на экран окна новой блок-схемы модели. В этом новом
окне следует вызвать
File ► New ► Library.
В результате этих действий на экране возникнет пустое окно
создаваемой библиотеки (рис. 7.108) с именем
Library: untitled1
. Теперь в нем можно создавать, или
перетягивать в него созданные S-блоки.
В общем случае образовать S-блок можно на основе двух видов стандартных блоков:
- блока
S-Function из раздела
User-Defined Function
библиотеки
SIMULINK
;
- блока SubSystem из раздела
Ports & Systems
той же библиотеки.
354
Блок на основе
S-Function
получается на основе написанных на языке MatLab файлов S-функций, и имеет
лишь один вход (возможно, векторный) и один выход (тоже векторный). Блок на основе
SubSystem
представляет собой блок-схему из существующих блоков и может иметь произвольное количество входов и
выходов произвольного вида.
Образуем в этой библиотеке S-блок
S_DUE, на основе созданной прежде одноименной S-функции.
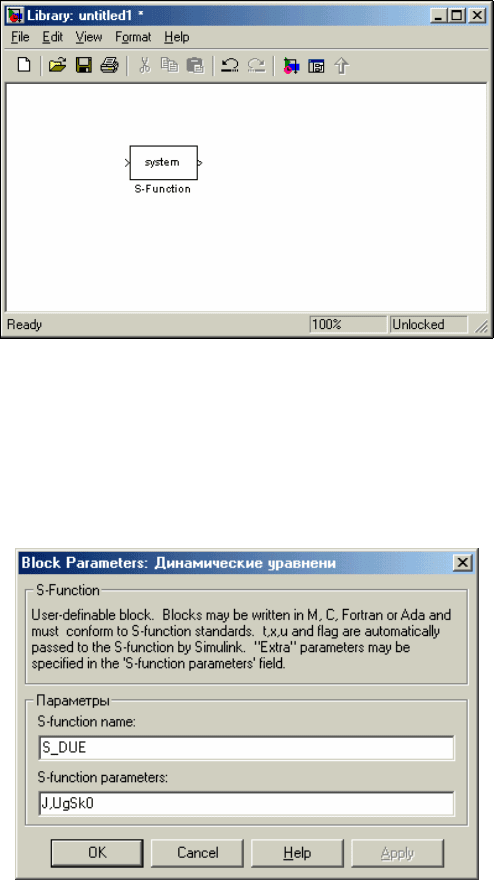
Прежде всего, перетянем в окно создаваемой библиотеки блок
S-Function из указанного раздела библиотеки
Function & Table
библиотеки
SIMULINK
. Окно библиотеки приобретет вид, приведенный на рис. 8. 25.
Рис. 8. 25. Окно создаваемой библиотеки
Теперь, дважды щелкнув на изображении этого блока, вызовем его окно настраивания (рис. 8. 26). В окошко S-
Function name введем имени S-функции (S_DUE), а в окошко S-Function parameters – ее параметры (J, UgSk0)
(рис. 8. 26) и щелкнем на кнопке OK внизу этого окна.
Рис. 8. 26. Окно настраивания блока S_DUE
В результате (если соответствующий файл существует в путях, достижимых для MatLab, а список введенных
параметров отвечает списку параметров, указанных в S-функции) окно настраивания исчезнет, а изображение
блока в окне библиотеки изменится (см. рис. 8. 27).

355
Рис. 8. 27. Внешний вид блока S_DUE
В завершение изменим название под блоком на такое "Дин. Уравн. Эйлера", чтобы точнее отобразить сущность
преобразований, которые осуществляет блок.
В дальнейшем, для моделирования процесса управления ориентацией, например, космического аппарата (КА),
обращающегося вокруг планеты по определенной замкнутой орбите, станет необходимым еще один блок,
осуществляющий интегрирование кинематических уравнений
ориентации, вычисляя значения параметров,
определяющих текущее угловое положение корпуса КА относительно орбитальной системы отсчета. Если в
качестве такого параметра принять кватернион поворота
, который переводит текущее положение КА в
нужное, соответствующие кинематические уравнения будут иметь вид
Q
)(
2
1
QΩωQ
Q
oo
−=
dt
d
,
где обозначено:
- вектор-кватернион абсолютной угловой скорости КА;
Ω
- вектор-кватернион абсолютной
угловой скорости орбитальной системы отсчета (жестко связанной с положением КА на орбите);
o
- знак
кватернионного умножения.
ω
Кватернионное кинематическое уравнение недостаточно удобно для проведения вычислений из-за того, что
действия над кватернионами существенно отличаются от действий над матрицами и не предусмотрены в
системе MatLab. Значительно удобнее превратить его в совокупность сугубо матричных уравнений:
⎪
⎩
⎪
⎨
⎧
+⋅×+−⋅=
−⋅−=
)]()()([
2
1
)(
2
1
0
0
ΩωqΩω
q
Ωωq
q
dt
d
dt
dq
t
(8.5)
В этих уравнениях величины
q
,
ω
и суть векторы-столбцы из проекций, соответственно, векторной части
кватерниона поворота, вектора абсолютной угловой скорости КА на оси связанной системы координат и
вектора угловой скорости орбитальной системы координат на ее же оси;
скалярная часть кватерниона
поворота; (
Ω
0
q
×
q
) – обозначения кососиметричной матрицы, составленной из проекций вектора
q
.
Создадим М-файл S-функции, осуществляющей интегрирование этих кинематических уравнений. Ниже
приведен текст этого М-файла по имени
S_KUqwat.
function [sys,x0,str,ts] = S_KUqwat(t,x,u,flag,OM0,Qw0)
% S-функция S_KUqwat Кинематических Уравнений в кватернионах
% Реализует переход от заданного вектора абсолютной
% угловой скорости орбитального космического аппарата
% к кватерниону поворота КА относительно орбитальной
% системы отсчета
% ВХОД блока:
% u = [omx,omy,omz]- вектор проекций абсолютной угловой
% скорости КА на оси CК, жестко связанной с ним
% ВЫХОД блока:
% y=[qw0,qw1,qw2,qw3] - вектор компонентов кватерниона поворота
% относительно орбитальной декартової системы координат
% Входные ПАРАМЕТРЫ S-функции:
% OM0 - орбитальная угловая скорость;
% Qw0 - вектор начального кватерниона поворота
% Лазарев Ю.ф. Укрaїна 18-12-2001
356
switch flag,
case 0
[sys,x0,str,ts] = mdlInitializeSizes(Qw0);
case 1,
sys = mdlDerivatives(t,x,u,OM0);
case 3,
sys = mdlOutputs(x);
case 9
sys = [];
end
% Конец процедуры
%
%===============================================
% Далее идут тексты внутренних процедур
%===============================================
%
function [sys,x0,str,ts] = mdlInitializeSizes(Qw0)
sizes = simsizes;
sizes.NumContStates = 4;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 4;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = Qw0;
str = [];
ts = [0 0];
% Конец процедуры mdlInitializeSizes
%=============================================
function z = mdlDerivatives(t,x,u,OM0)
% ВХОДНОЙ вектор "u" - вектор проекций моментов внешних сил,
% действующих на космический аппарат соответственно по осям X Y Z
% х(1)=qw0 - скалярная часть кватерниона;
% х(2:4)=qw(1:3) - векторная часть кватерниона;
% z(1)=d(qw0)/dt; z(2:4)=d(qw)/dt; ;
% Формирование векторов угловых скоростей и кватерниона
om=u; OM = [0 OM0 0]'; v=x(2:4);
omMOM=om-OM; omPOM=om+OM;
z(1)=-(v'*omMOM)/2; % уравнения скалярной части кватерниона
z4=(x(1)*omMOM+cross(v,omPOM))/2;% уравнения векторной части
кватерниона
z(2:4)=z4;
% Конец процедуры mdlDerivatives
%=============================================%
function y = mdlOutputs(x)
y=x;
% Конец процедуры mdlOutputs
Полностью аналогично предыдущему создадим S-блок под именем
S_Kuquat
. В нем входом является вектор
проекций абсолютной угловой скорости КА, а выходом – вектор, состоящий из четырех компонентов
кватерниона поворота КА относительно орбитальной системы координат. Первый компонент представляет
собой скалярную часть, остальные три – проекции векторной части этого кватерниона. В результате получим
окно библиотеки в виде, представленном на рис. 8. 28.
Рис. 8. 28. Новый вид библиотеки LAZlibrary
Примечание. Если блок-схема библиотеки была закрыта, изменение ее после повторного вызова
возможно только после того, как вызвана команда в окне этой библиотеки
Edit ►
Update diagram.
357
Наконец, довольно важно создать S-блок, который осуществлял бы операцию векторного умножения двух
векторов, аналогичную М-функции
cross.
Для этого удобнее использовать другой стандартный блок
SubSystem
из раздела
Ports & Subsystems
.
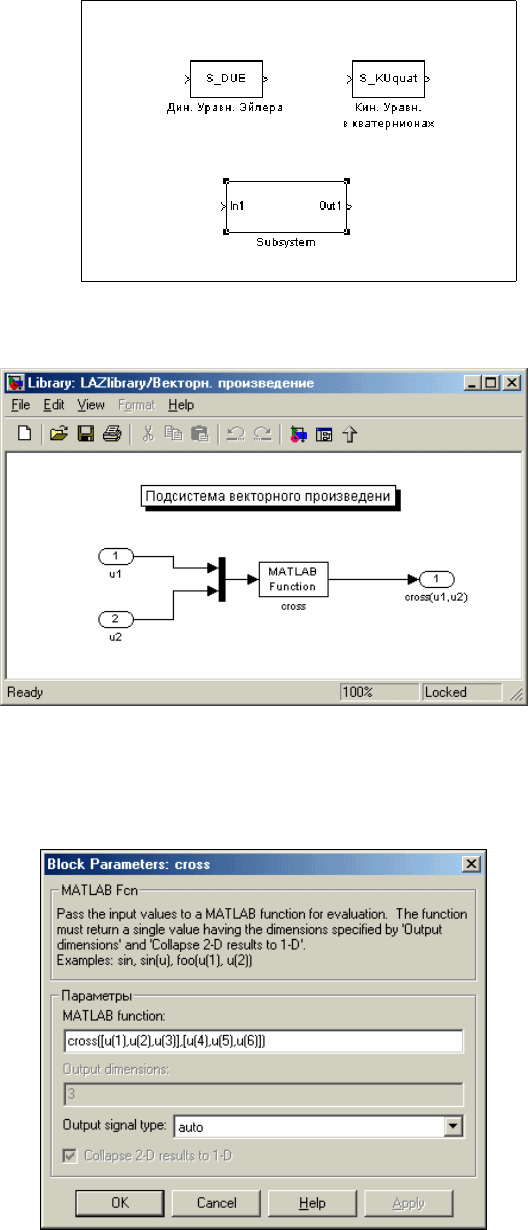
Перетянем его мышью в окно новой библиотеки (рис. 8. 29). Дважды щелкнув на изображении этого блока,
получим пустое окно, в котором составим блок-схему подсистемы, приведенную на рис. 8. 30.
Рис. 8. 29. Включение в библиотеку блока Subsystem
Рис. 8. 30. Блок-схема подсистемы Векторное произведение
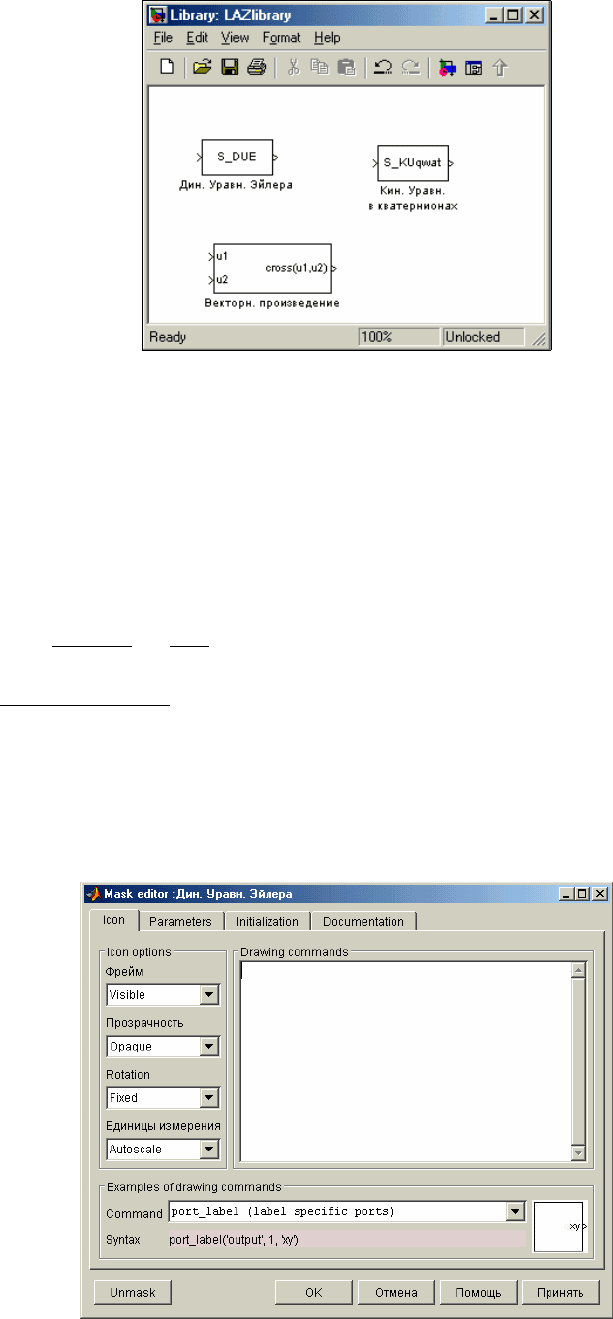
В ней использован блок
MATLAB Function из раздела
User-Defined Functions
, окно настраивания
которого представлено на рис. 8. 31. Именно он, собственно, и выполняет операцию векторного умножения
двух входных векторов, используя для этого стандартную функцию
cross
системы MatLab.
Рис. 8. 31. Окно настраивания блока Cross (Matlab Function)
358
В итоге всего этого получим новую библиотеку из трех новых собственных S-блоков. Запишем ее как
LAZlibrary
(рис. 8. 32).
Рис. 8. 32. Библиотека пользователя LAZlibrary
Примечание. В русифицированной версии MatLab 6.5 появление в тексте документов или имени
блоков русской буквы «я» приводит к необратимым нарушениям работы блока. При
составлении русского текстового оформления блока избегайте употребления буквы
«я».
8.2.2. Маскировка блоков
Теперь рассмотрим процесс маскировки блока, т. е. образования окна настраивания блока, которое является
более удобным механизмом оперирования с блоком.
Прежде всего, нужно
выделить тот блок в библиотеке, для которого желательно образовать маску. Пусть это
будет блок
S_DUE
новой библиотеки. Выделим его, щелкнув мышкой на его изображении.
Теперь следует
выполнить команду
Edit ► Mask S-Function
окна библиотеки, в которой расположен
выделенный блок. На экране возникнет окно
Mask editor
редактора маски, представленное на рис. 8. 33.
Примечание. При повторном вызове вашей библиотеки возможно, что эта команда не является
активной. Тогда обратите внимание на предпоследнюю команду в перечне меню. Она
должна быть активной и иметь такой вид Unlock Library. Нажмите на нее мышью.
Вид перечня меню изменится, и команда Mask S-Function должна стать активной.
Рис. 8. 33. Окно редактора маски (Mask editor)
359
Окно
Mask Editor
(рис. 8. 33) имеет четыре вкладки:
Icon для создания и редактирования изображений на изображении блока;
Parameters для создания и редактирования диалоговой части (ввода
параметров) окна настраивания;
Initialization
для введения некоторых команд среды MatLab при инициализации
блока;
Documentation
для оформления и редактирования текстовой части окна
настраивания блока и справочной части маски.
Укажем, что из
рассмотрения окон настраивания (масок) стандартных S-блоков вытекает, что эти окна имеют, в
общем случае, три части:
- первая (верхняя) часть содержит справочную информацию о назначении блока, его главных параметрах и
правилах, которыми следует пользоваться при введении параметров блока и его использовании;
- вторая (нижняя) часть по имени Parameters содержит окошки ввода параметров
блока и надписи над
этими окошками, которые объясняют смысл этих параметров;
- третья, самая нижняя, стандартная часть содержит стандартные кнопки
OK, Cancel, Help и Apply.
Редактор маски предназначен для оформления первых двух частей окна настраивания, а также создания
справки, которая вызовется при нажатии кнопки
Help в этом окне.
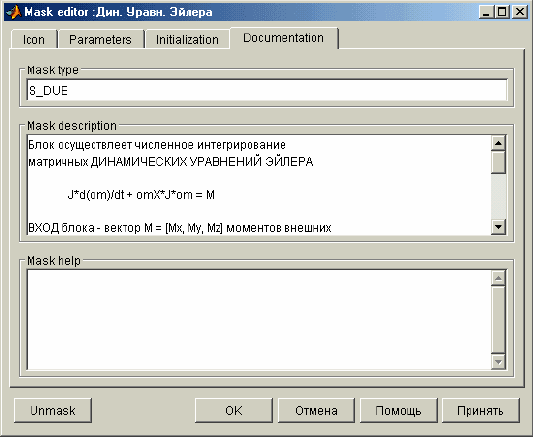
Рис. 8. 34. Заполнение вкладки Documentation окна Mask editor
Перейдем (с помощью мыши) к вкладке Documentation (рис. 8. 34). В окно Mask type следует ввести имя блока.
В окно Mask description записывается информация, которую бы вы желали иметь в верхней (справочной) части
окна настраивания блока, а в окне Mask Help записывается дополнительная справочная информация, которая
вызовется, если в окне маски
нажать кнопку Help.
Примечание. Грамматические ошибки в тексте документации маски вызваны тем, что в
русифицированной версии MatLab 6.5 появление в тексте документов или имени
маски и блоков русской буквы «я» часто приводит к необратимым нарушениям
работы маски или блока. При составлении русского текстового оформления маски
избегайте употребления буквы «я».
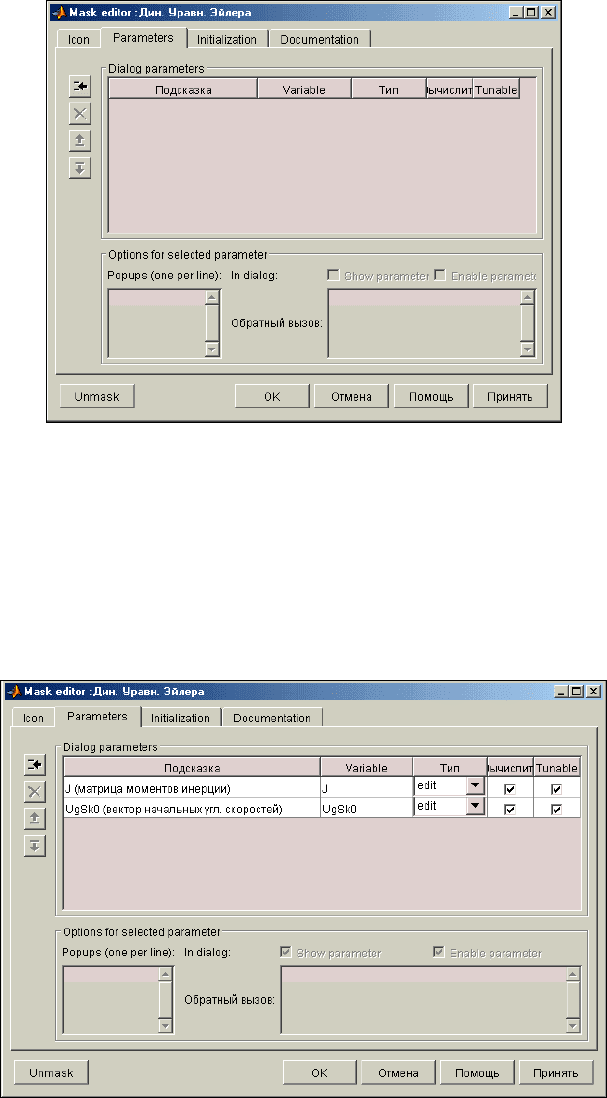
Перейдем ко вкладке
Parameters (рис. 8. 35), можно сделать вывод, что с ее помощью можно сконструировать
вторую, важнейшую, часть маски, - ее диалоговую часть.
Как видим, основное пространство вкладки занимает окно (пока неактивное) Dialog Parameters (Параметры
диалога). В нем вводятся параметры, определяющие количество окошек ввода на маске, надписи над ними и
имена переменных, под которыми они будут
фигурировать в блоке. Слева от этого окна (вверху) находится
единственная активная кнопка с изображением стрелки. Это кнопка Add (Присвоить). Нажатие на нее
приводит к активизации окна, - в нем появляется активная строка, в которую следует ввести диалоговые
параметры.
360
Рис. 8. 35. Вкладка Parameters окна Mask editor
В блоке
S_DUE всего два параметра, значения которых нужно вводить в диалоговой форме – матрица
моментов инерции тела J размером (3*3) и вектор UgSk0 начальных значений трех проекций угловой скорости
тела. Поэтому нужно создать два окошка ввода значений этих параметров и создать надписи на них.
Введение очередного окошка в маску осуществляется нажатием мышью кнопки Add
по левую сторону от
наибольшего окна вкладки, где отображаются результаты редактирования. Сама запись этой надписи
осуществляется в окне Dialog Parameters (рис. 8. 36).
Рис. 8. 36. Ввод диалоговых параметров маски блока S_DUE
При этом в колонку Подсказка записывается надпись над будущим окошком маски, а в колонку Variable – имя,
под которым введенная величина будет фигурировать внутри блока. Результат ввода этих параметров для блока
S_DUE
представлен на рис. 8. 36.
Если теперь завершить редактирование маски нажатием кнопки
OK в окне редактора маски, перейти в окно
библиотеки и дважды щелкнуть на изображении блока
S_DUE, то возникнет окно маски блока, изображенное
на рис. 8. 37. Маска блока S_DUE создана.