Лазарев Ю.Ф. Mатематическое моделирование физических процессов и технических систем в MATLAB
Подождите немного. Документ загружается.

371
Ветвь, формирующая трение покоя, осуществляет следующие функции. Сначала определяется модуль акт
силы. Затем он сравнивается со значением трения поко
ивной
я. Определяется минимальная из этих двух
на который действует момент сил
ения вокруг этой оси и самого основания.
г
положительных величин. Затем ей присваивается знак активной силы (блоки
Sign и Product). Эта величина
и составляет трение покоя и направляется на первый вход переключателя.
Сконструируем маску блока
Suhoe trenye (рис. 8. 44).
Рассмотрим теперь задачу исследования движения физического маятника,
сухого трения в опорах его оси вращения, в условиях вращ
Обозначим
α
- угол поворота маятника относительно основания. Тогда уравнение движения (вращения вокру
его оси) маятника можно записать в таком безразмерном виде:
)(sin
αµϕ
ϕ
′
=+
′′
tr
, (8.10)
где, как и ранее
- угол отклонения маятника от вертикали. В
безразмерный момент сил трения, т. е. отношение момента трения к та му опорному маятниковому
связаны между собой соотношением
1)
Запишем уравнение (10) с учетом (11) в виде:
. (8.12)
Координата
характеризует относительное перемещение (угловое) маятника и основания. Сравнивая (12) с
(8) можно прийти к выводу, что в рассматриваемом случае
ок-сх а
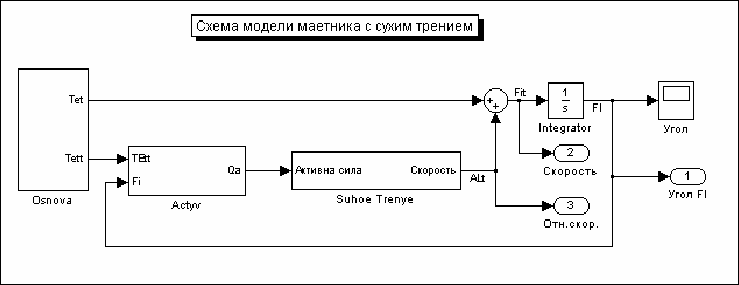
TRENYE S-модели, реализующей интегрирование уравнения приведена на рис. 8. 45.
еличина
)(
αµ
′
tr
представляет собой
ϕ
к называемо
моменту
mgl
.
Обозначим угол поворота основания относительно вертикали вокруг оси вращения маятника через
ϑ
. Тогда
три угла
и
ϑ
,
α
ϕ
ϑϕα
−=
. (8.1
)()}sin({
αµϑαϑα
′
++−
′′
−=
′′
tr
α
α
=q
,
1
=
q
M
,
ϕϑϑαϑ
sin)sin( −
′′
−=+−
′′
−=
a
Q
.
Бл ем
(12),
Рис. 8. 45. Блок-схема S-модели TRENYE
ормирует сигналы угловой скорости (Tet) и углового ускорения (Tett)
ращения основания.
ετω
+⋅
.
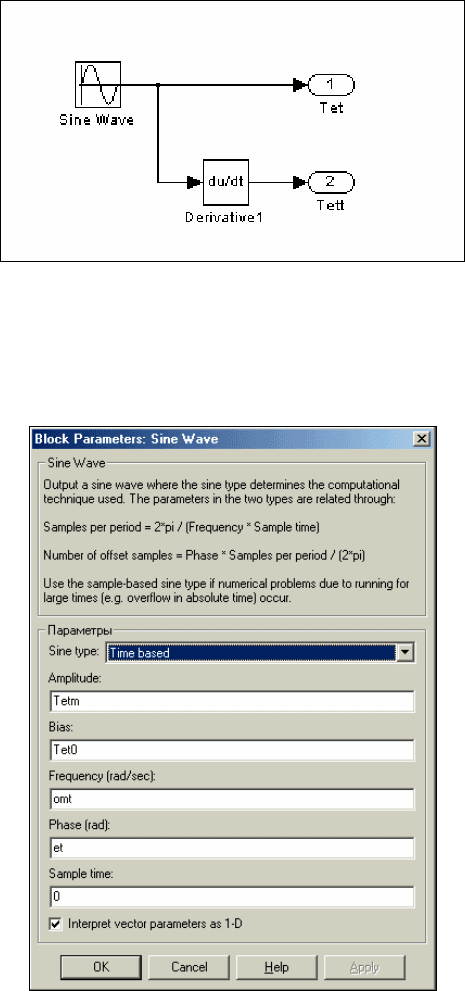
Блок Osnova в этой S-модели (рис. 8. 46) ф
в
Как видим, угловая скорость основания формируется по закону
sin()(
θθτϑ
′
+
′
=
′
)
ϑϑ
mo
372
Рис. 8. 46. Блок-схема подсистемы Osnova
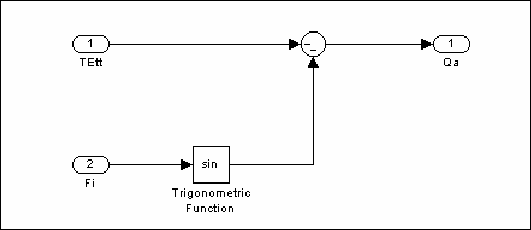
Значения используемых констант вводятся в окне настраивания блока Sine Wave (рис. 8. 47).
Рис. 8. 47. Окно настраивания блока Sine Wave
Ниже приводится таблица соответствия обозначений в формулах и программе.
В формуле В программе Примечание
o
θ
′
Tet0 постоянная составляющая угловой скорости
m
θ
′
Tetm
амплитуда угловой скорости
ϑ
ω
omt частота изменения угловой скорости
ϑ
ε
et начальная фаза угловой скорости
Блок-схема второй подсистемы Activ, формирующей сигнал активной силы, чрезвычайно проста и показана на
рис. 8. 48.
373
Рис. 8. 48. Блок-схема подсистемы Activ
Как и ранее, создадим управляющую программу TRENYE_upr. m, которая будет выполнять следующие
функции:
1) ввода значений всех параметров, однозначно определяющих движение системы;
2) запуск S-модели TRENYE.mdl на моделирование;
3) выведение результатов моделирования в графическое окно MatLab.
Текст программы приведен ниже.
% Trenye_upr
% Управляющая программа для запуска модели TRENYE.mdl
% Лазарев Ю.Ф. 5-2-2004
clear all, clc
% 1. Задание массы и характеристик трения
Mq=1; TrPoc=0.2; TrDvig=0.01;
% 2. Задание параметров вращения основания
% Teta' = Tet0+Tetm*sin(omt*t+et)
Tetm=0; Tet0=0; omt=0; et=0;
% 3. Задание начальных условий
fi0=30*pi/180; fit0=0;
% 4. Расчет начальной относительной скорости
qt0=fit0-Tet0-Tetm*sin(et);
% 5. Запуск модели на моделирование
sim('TRENYE'); % МОДЕЛИРОВАНИЕ на S-модели
% 6. Формирование данных для вывода ГРАФИКОВ
FI=yout(:,1)*180/pi; FIt=yout(:,2); ALt=yout(:,3); t=tout;
% 7. Выведение графиков
subplot(2,2,1)
plot(FI,FIt,'.',FI,ALt), grid
set(gca,'fontsize',12)
xlabel('Угол (градусы)'), ylabel('Угловая скорость (б/р
)')
legend('относит.','абсолютн.',0)
set(gca,'fontsize',14), title('Фазовый портрет')
subplot(2,2,[3 4])
plot(t,FI), grid
set(gca,'fontsize',12)
xlabel('Время (б/р)'), ylabel('Угол (градусы)')
set(gca,'fontsize',14), title('Угол отклонения от вертикали')
subplot(2,2,2)
axis('off')
h=text(0,1,'Mаятник с сухим трением','fontsize',16);
h=text(-0.2,0.8,'Вращение основания:
Teta''(t)=Tet0+Tetm*sin(omt*t+et)','fontsize',12);
h=text(-0.2,0.7,['где: ',...
sprintf('Tet0 = %g; ',Tet0),sprintf('Tetm = %g;',Tetm),...
sprintf('omt = %g; ',omt),...
sprintf('et =% g градусов',et*180/pi)]);
h=text(-0.2,0.5,'Характеристики трения','fontsize',12);
h=text(-0.1,0.4,[sprintf('Трение покоя = %g; ',TrPoc),...
sprintf('Трение движения = %g; ',TrDvig)]);
h=text(-0.2,0.2,sprintf('Начальная абс. угл. скор. = %g;',fit0),...
'fontsize',12);
h=text(-0.2,0.0,'--------------------------------------------');
374
h=text(-0.2,-0.1,'Программа TRENYE-upr 5-02-2004 Лазарев Ю. Ф.');
h=text(-0.2,-0.2,'--------------------------------------------');
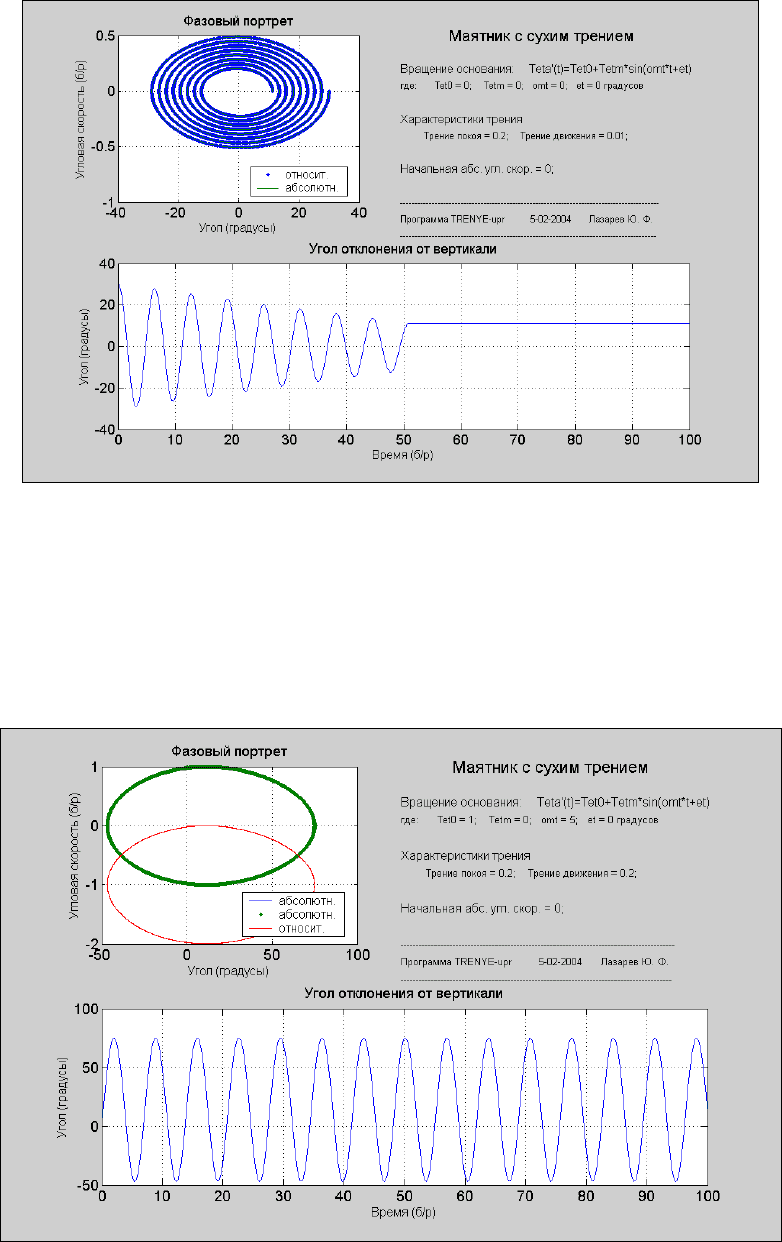
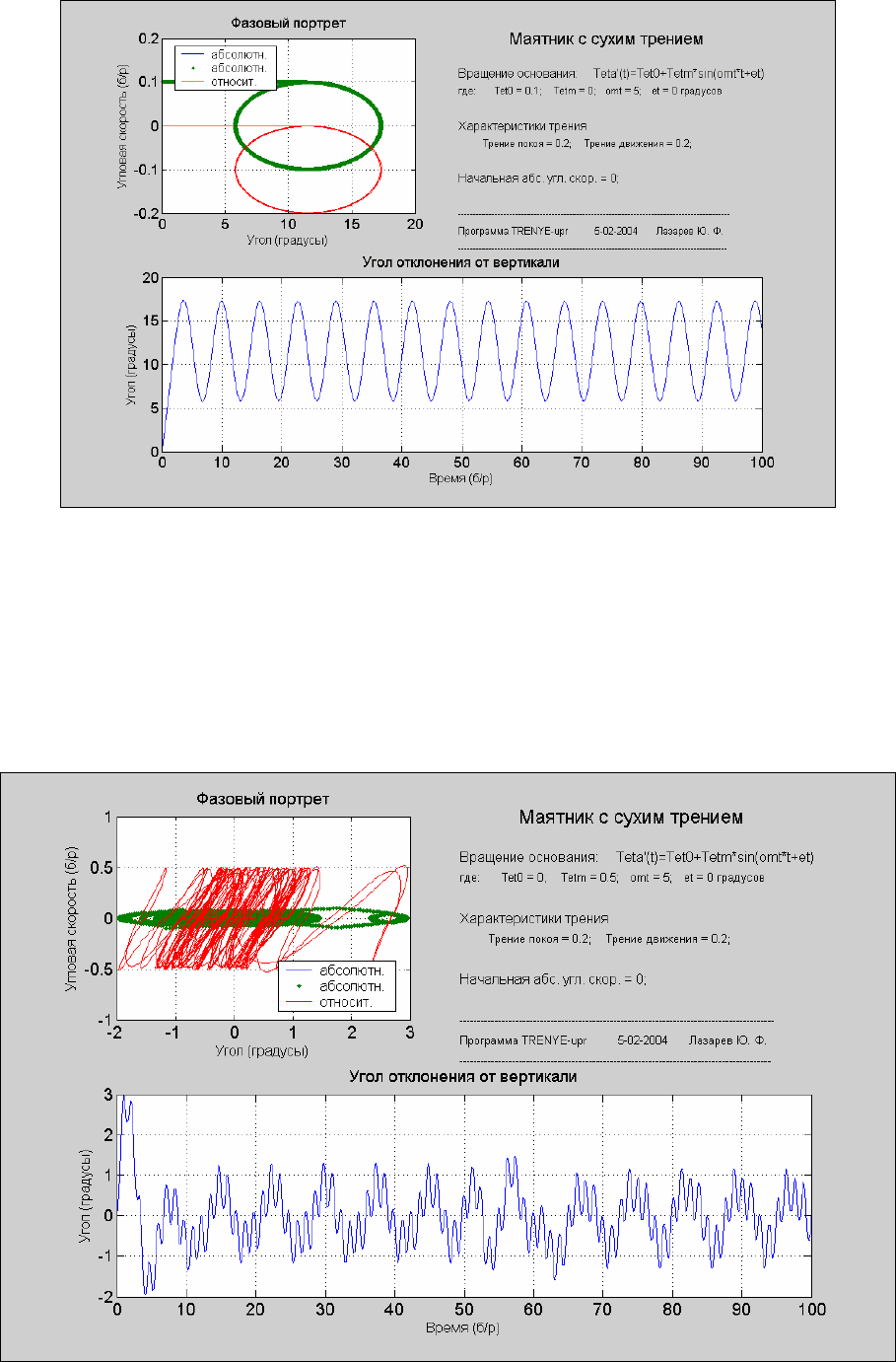
Запуская эту программу на исполнение, получим результат, показанный на рис. 8. 49.
Рис. 8. 49. Свободные колебания маятника с сухим трением
Из рисунка становятся наглядными три основных нелинейных свойства маятника:
- огибающая свободных колебаний является прямой;
- колебания затухают за конечное время;
- маятник останавливается не в положении вертикали, а в смещенном относительно нее положении.
Следующие два рисунка (8. 50 и 8. 51) иллюстрируют поведение маятника при равномерном вращении
основания
вокруг оси маятника (такой маятник называют маятником Фроуда).
Рис. 8.50. Маятник Фроуда при значительной угловой скорости основания (1)
375
Рис. 8.51. Маятник Фроуда при малой угловой скорости основания (0,1)
Из их рассмотрения следует, что при вращении основания с постоянной угловой скоростью под действием сил
сухого трения маятник совершает колебания с частотой его собственных колебаний относительно среднего
положения, смещенного относительно вертикали на 11,5 градусов в сторону вращения основания. От величины
угловой скорости основания
зависит только амплитуда этих колебаний.
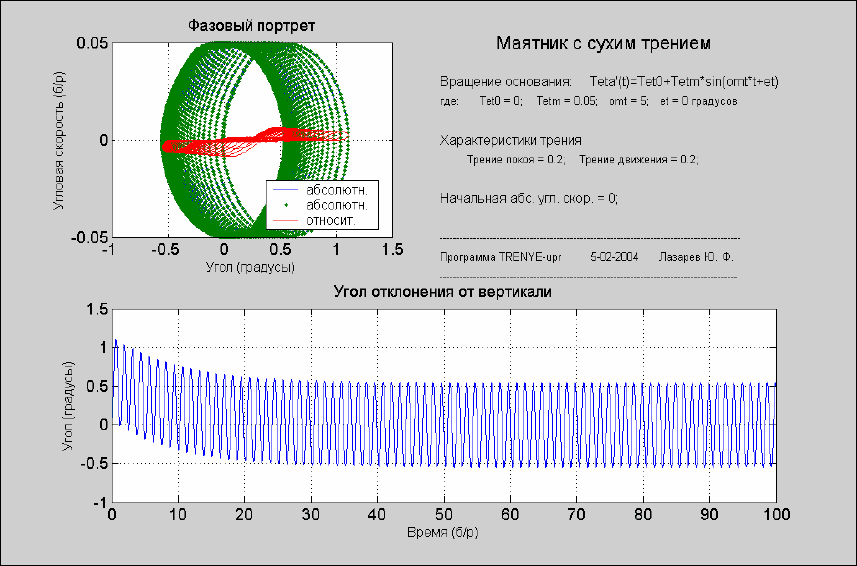
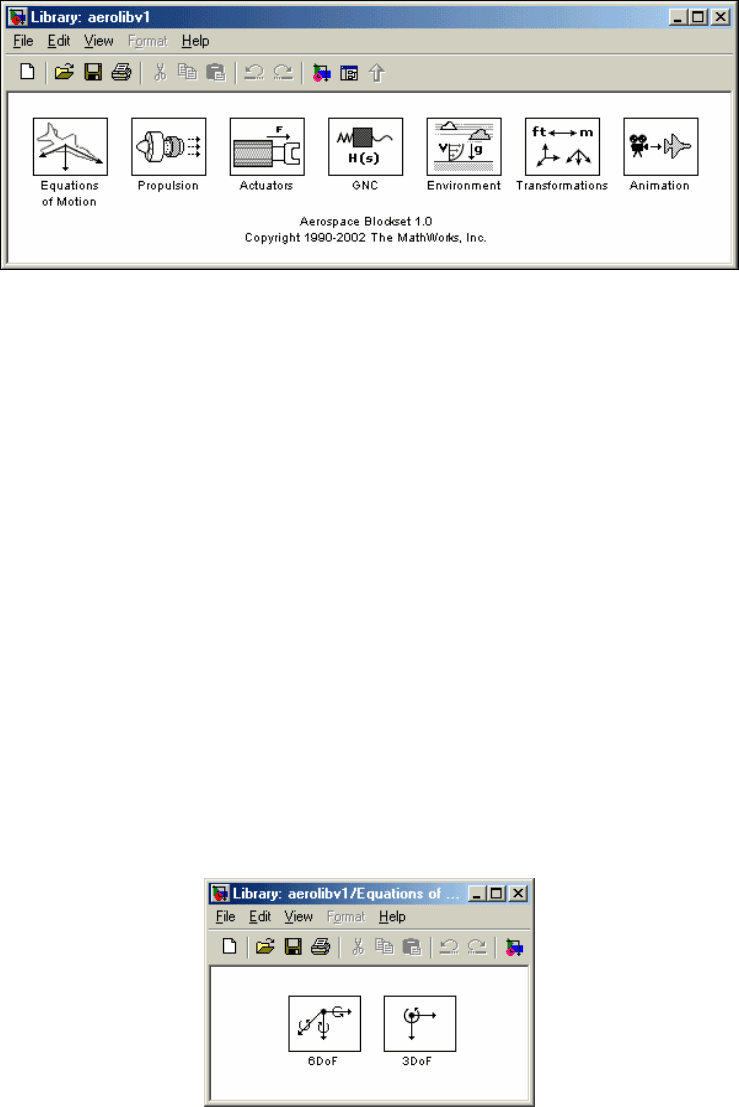
Влияние колебаний основания вокруг оси маятника продемонстрировано на рис. 8. 52 и 8. 53.
Рис. 8.52. Маятник при колебаниях основания с большой амплитудой
376
Рис. 8.53. Маятник при колебаниях основания с малой амплитудой
Интересно, что амплитуда вынужденных колебаний маятника практически не зависит от амплитуды колебаний
основания. Но при значительных амплитудах колебания основания, на вынужденные колебания накладываются
незатухающие собственные колебания маятника.
8.4. Вопросы для самопроверки
1. Как внутри блоков обозначаются входные величины, выходные величины блока и его переменные
состояния?
2. Что такое функции пересечения нуля, для чего они служат и в какие блоки входят?
3. Опишите средства пакета
Simulink
, обеспечивающие связь данных из рабочего пространства MatLab и
данных, содержащихся в S-модели.
4. Что такое S-функции, для чего они предназначены, и как их создать?
5. Как обеспечить запуск S-модели из программы MatLab?
6. Как обеспечить запуск программы MatLab из S-модели?
7. Что такое маска блока, и для чего она предназначена?
8. Как создать окно настраивания блока
?
9. Как создать собственную библиотеку S-блоков?

377
Урок 9. Моделирование аэрокосмических объектов (биб-
лиотека Aerospace)
Общая характеристика библиотеки Aerospace
Моделирование свободного углового движения космического аппарата
Моделирование управляемого углового движения космического аппарата
Моделирование движения искусственного спутника Земли
378
Мы познакомились с ядром пакета
Simulink
– библиотекой
SIMULINK
. Блоки, входящие в нее, яв-
ляются основой создания любых S-моделей. Специалисты различного профиля, основываясь на возможностях
ядра Simulink
, разработали ряд S-библиотек, приспособленных для решения специфических задач своей от-
расли. Ряд таких библиотек включены в комплект поставки пакета
Simulink
. Одной из них является библиоте-
ка
Aerospace Blockset
, предназначенная для моделирования динамики полетов аэрокосмических объектов.
9.1. Общая характеристика библиотеки Aerospace
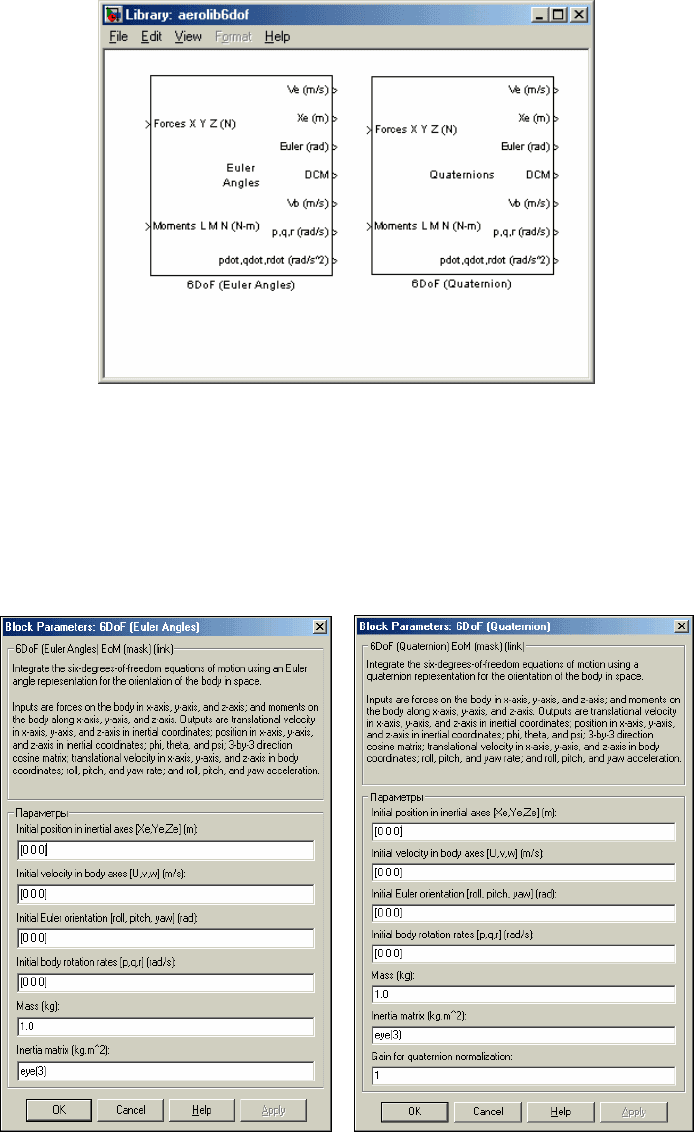
Войдите в браузер Simulink и с помощью контекстного меню библиотеки
Aerospace
вызовите ок-
но
aerolibv1
этой библиотеки (рис. 9. 1).
Рис. 9. 1. Окно библиотеки aerolibv1
Как видим, в состав библиотеки входят шесть разделов:
Equatios of
Motion
(Уравнения движения) содержит блоки, позволяющие соста-
вить модель летательного аппарата;
Propulsion
(Двигатель) включает блоки, моделирующие влияние двига-
тельной установки летательного аппарата;
Actuators
(Привод, Рулевые машинки) содержит блоки, моделирующие
поведение привода рулей летательного аппарата;
GNC
Содержит блоки моделирования системы управления движе-
нием летательного аппарата
Environment
(Среда) состоит из блоков, моделирующих влияние окружаю-
щей среды на движущийся в ней летательный аппарат
Transformations
Animation
(Преобразования) содержит блоки преобразования координат
(Анимация) включает блоки, позволяющие построить анима-
ционные изображения движения летательного аппарата в про-
странстве.
Раздел Equations of Motion
В разделе Equatons of Motion находятся две группы блоков (рис. 9. 2): 6DoF (6 Degree of freedom – 6
степеней свободы) и 3DoF (3 Degree of freedom – 3 степени свободы).
Рис. 9. 2. Содержимое раздела Equations of Motion
379
В первой группе расположены блоки, позволяющие задать модель пространственного (с шестью степе-
нями свободы – три перемещения вдоль осей декартовой системы координат и три угла поворота ЛА относи-
тельно этой системы координат) движения. Дважды щелкнув мышью на изображении группы 6DoF, вы полу-
чите на экране окно, представленное на рис. 9.3.
Рис. 9. 3. Блоки подраздела aerolib6dof группы 6DoF
В нем вы обнаружите два блока - 6DoF (Euler Angles) и 6DoF (Quaternion). Оба блока представляют собой мо-
дели поведения твердого тела с шестью степенями свободы. Но первый из них осуществляет представление
углового движения тела в так называемых углах Эйлера, а второй – в виде кватерниона поворота.
Окна настраивания блоков (рис. 4 и 5)
почти не отличаются.
Рис. 9. 4. Окно настраивания блока 6DoF (Euler Angles) Рис. 9. 5. Окно настраивания блока 6DoF (Quaternion)
Прежде чем ознакомиться с содержанием этих окон, следует оговорить особенности и обозначения
систем координат, используемых в библиотеке
Aerospace.
В качестве основной (базовой) системы координат здесь принята система декартовых (взаимно ортого-
нальных) осей
, связанная с поверхностью Земли. При этом ось предполагается вертикальной и
eee
ZYX
e
Z
380
направленной вниз, к центру Земли. Две другие оси лежат в плоскости горизонта. Земля предполагается непод-
вижной, не вращающейся в пространстве и плоской.
Отсюда следует:
1) система земных осей
в этих условиях является также и инерциальной;
eee
ZYX
2) с помощью библиотеки Aerospace можно изучать движения вблизи поверхности Земли лишь на
небольших расстояниях от начальной точки и в течение небольшого промежутка времени, когда кривизной
Земли и ее вращением в пространстве можно пренебречь.
Вторая система координат
по умолчанию имеет начало в центре масс
O
летательного аппа-
рата (в дальнейшем – ЛА). Ось
направлена по продольной оси ЛА к носу, ось перпендикулярная ей,
лежит в плоскости крыльев и направлена вправо (если смотреть с хвоста на нос ЛА), ось
перпендикулярна
плоскости крыльев и направлена вниз.
bbb
ZYX
b
X
b
Y
b
Z
Проекции вектора
скорости ЛА на оси обозначаются , и соответственно, проек-
ции вектора
абсолютной угловой скорости ЛА – соответственно , и , а проекции вектора момен-
та внешних сил, действующих на ЛА -
, и .
V
bbb
ZYX
b
u
b
v
b
w
ω
p q
r
M
L M
N
Углы Эйлера, используемые в библиотеке, состоят из углов рыскания
ψ
(yaw), тангажа (pitch) и
крена
(roll). Угол рыскания представляет собой угол отклонения в плоскости горизонта продольной оси
ЛА от направления оси
земной системы координат. Угол тангажа – это угол подъема продольной оси ЛА
над плоскостью горизонта, а угол крена является углом поворота корпуса ЛА вокруг продольной его оси.
ϑ
ϕ
b
X
e
X
Возвращаясь к окнам настраивания, отметим, что в параметры настраивания входят такие величины:
Initial position in
inertial axes
[Xe,Ye,Ze] (m)
Начальное положение в инерциальных (земных) осях. Следует задать на-
чальное отклонение центра масс О ЛА от начала земной системы координат
в метрах
Initial velocity in
body axes [u,v,w] (m/s)
Начальные скорости в осях тела. Следует задать проекции скорости центра
масс ЛА в начальный момент времени на оси, связанные с ЛА в метрах в
секунду
Initial Euler
orientation
[roll,pitch,yaw] (rad)
Начальная ориентация в углах Эйлера. Следует задать начальные углы кре-
на, тангажа и рыскания в радианах
Initial body rotation
rates [p,q,r] (rad/s)
Начальные угловые скорости тела. Следует задать начальные значения про-
екций угловой скорости ЛА на оси, связанные с ЛА, в радианах в секунду
Mass (kg)
Задается значение массы ЛА в килограммах
Inertia matrix (kg.m^2)
Задается матрица 3×3 моментов инерции ЛА относительно осей, связанных
с ним
Входные величины у обоих блоков одинаковы. Это вектор текущих проекций на оси ЛА всех внешних
сил, действующих на него, и вектор текущих моментов сил относительно осей ЛА.
Выходы обоих блоков также одинаковы. Они перечислены в следующей таблице.
Ve (m/s)
Вектор проекций текущего значения вектора скорости центра масс ЛА на оси земной
(инерциальной) системы координат
Xe (m)
Вектор текущих смещений центра масс ЛА относительно начала земной (инерциальной)
системы координат
Euler (rad)
Вектор текущих значений углов крена, тангажа и рыскания соответственно
DCM
Текущее значение матрицы направляющих косинусов связанных осей относительно зем-
ных осей
Vb (m/s)
Вектор проекций текущего значения вектора скорости центра масс ЛА на оси системы
координат, связанной с корпусом ЛА
p,q,r (rad/s)
Вектор проекций текущей угловой скорости ЛА на оси, связанные с ЛА
pdot,qdot,rdot
(rad/s^2)
Вектор производных от проекций текущей угловой скорости ЛА на оси, связанные с ЛА
Вторая группа блоков 3DoF позволяет моделировать движение ЛА в одной плоскости (обычно – про-
дольное движение в вертикальной плоскости). Она содержит два блока (рис. 9.6) – Equations of Motion (Body
Axes) (Уравнения движения в связанных осях) и Incidence & Airspeed (Угол атаки и воздушная скорость).