Кузнецов О.Л., Никитин А.А., Черемисина Е.Н. Геоинформатика и геоинформационные системы
Подождите немного. Документ загружается.

стью. Используемые в технологии ПАРМ-КОЛЛЕКТОР алгоритмы приво-
дят к уменьшению неоднозначности решения обратной задачи путем пре-
одоления ограниченности частотного диапазона сейсмических данных за
счет информации, содержащейся в скважинной модели, как начальном при-
ближении модели. Априорной информацией при преобразовании сейсмиче-
ских профилей в разрезы емкостных параметров в данной технологии явля-
ются опорные сейсмические модели среды, формирование которых базиру-
ется на использовании геолого-геофизической информации по скважинам,
расположенным на сейсмических профилях или вблизи них (данные акусти-
ческого каротажа, гамма-гамма каротажа, литологии, стратиграфии и сейс-
мических волновых полей). Построение опорных сейсмоакустических моде-
лей включает сейсмостратиграфическую привязку модели среды к волново-
му полю и его атрибутам, определение формы сейсмического импульса и
процедуру адаптации модели к волновому полю. Полученная опорная сейс-
моакустическая модель экстраполируется вдоль профилей с учетом измене-
ния волнового поля на каждой трассе ОГТ (общей глубинной точки) и ис-
следуемом интервале разреза. Решение обратной задачи сейсморазведки
проводится путем многократного решения прямой задачи, что в конечном
итоге обеспечивает выбор типа модели геосреды, ее параметров и формы
сейсмического сигнала. Полученные синтетические волновые поля в ре-
зультате свертки формы сигнала с моделью сравниваются с эксперимен-
тальными, и их соответствие оценивается критерием качества. В конечном
итоге удается в допустимо реальном приближении спрогнозировать модель
среды, строение месторождения. его емкостные свойства и подсчетные па-
раметры. С помощью системы ПАРМ-КОЛЛЕКТОР проведено изучение
емкостных свойств для различных типов коллекторов месторождений угле-
водородов. Интегрирование скважинной и сейсморазведочной информации
с целью оценки литофациальной зональности, тектонических нарушений и
прогноза коллекторских свойств во внескважинном пространстве реализует-
ся в компьютерной технологии ИНТЕГРАН.
Входная информация в этой технологии представлена временными
разрезами ОГТ (до и после миграции), ВСП, стратиграфической приурочен-
ностью опорных отражений, данными геофизических исследований сква-
жин.
Комплексирование скважинной и сейсморазведочной информации
носит итерационный характер в зависимости от получаемых результатов на
каждом этапе комплексной интерпретации Технология ИНТЕГРАН включа-
ет семь основных этапов, содержание которых сводится к следующему [17]:
1. Анализ данных каротажа и построение геоакустических и эффектив-
ных сейсмических моделей. Входные данные – отредактированные
данные каротажа, петрофизическая и геолого-промысловая инфор-
мация, а также результаты их обработки в виде пластовой модели
среды.
На этом первом этапе обеспечивается:
– анализ промыслово-геофизической модели, достаточности ее деталь-
ности в сравнении с изменением значений акустических свойств (на-
личие данных о плотностях и скоростях), соответствующая коррек-
ция модели, а именно, выделение более тонкого слоя;
– установление типов геологического разреза, оценка статистических
характеристик и корреляционных связей пластовых параметров в
пределах каждого типа;
– построение одномерных эффективных сейсмических моделей
(ОЭСМ) и анализ их информативности;
– расчет импульсных и синтетических трасс, анализ их динамических и
кинематических атрибутов;
– формирование критериев интерпретации характеристик ОЭСМ, мо-
дельных трасс, обеспечивающих районирование по типам геологиче-
ского разреза и прогноз коллекторских свойств; эффективных тол-
щин линейной емкости и др.
2. Импульсные преобразования временных разрезов, их анализ, выде-
ление, прослеживание и увязка по площади времен опорных отраже-
ний, сейсмофациальное районирование. С этой целью используются
временные разрезы ОГТ, ВСП и данные о стратиграфической при-
уроченности опорных отражений. В результате этих преобразований
осуществляется выбор одного или нескольких вариантов форм эле-
ментарного сигнала и видов деконволюции. Критерием выбора явля-
ется прослеживаемость и разрешенность импульсов опорных отра-
жений.
3. Идентификация данных каротажа и сейсморазведки путем страти-
графической привязки опорных отражений с точностью до границ
ОЭСМ, установления геологической приуроченности промежуточ-
ных отражений и выявление среди них необходимых для решения
поставленных задач искомого объекта. Идентификация, как и в тех-
нологии ПАРМ-КОЛЛЕКТОР, осуществляется на основе сопостав-
ления реальных трасс с различными формами геоакустических моде-
лей (ОЭСМ, импульсных и синтетических трасс). При наличии дан-
ных ВСП сопоставление выполняется по схеме: данные каротажа
(ОЭСМ) – временной разрез ВСП – трассы временного разреза ОГТ.
В процессе идентификации отбираются варианты ОЭСМ и импульс-
ных временных разрезов (ИВР), отличающиеся наибольшим подоби-
ем, что создает возможность коррекции данных акустического каро-
тажа (АК). Для стратиграфической привязки необходимо наличие
достаточно протяженных интервалов исследования АК (0,5-0,8 с. по
времени отражения), однородность по латерали фациальной обста-
новки и морфологии границ в окрестности скважины и сопоставляе-
мого участка сейсмического профиля, а также плавность латерально-
го изменения скорости и глубины залегания отражающих границ.
4. Построение пространственной толстослоистой модели объекта, пред-
ставленной структурно-тектоническими характеристиками и интер-
вальными скоростями. Это построение осуществляется по временам
опорных отражений, прослеженных по сети профилей, спектрам ско-
ростей, данным ВСП, ОЭСМ с учетом сейсмофациального райониро-
вания и атрибутов сейсмической записи в интервалах, ограниченных
опорными отражениями.
5. Псевдоакустическое преобразование импульсных временных разре-
зов с опорой на интервальные скорости, а при наличии данных о
плотности и на интегральные жесткости толстослоистой модели.
6. Расчет сейсмических атрибутов целевого геологического интервала
по модификациям временных разрезов; ОГТ, мгновенных амплитуд,
импульсных и псевдоакустических. На этом этапе реализуется про-
слеживание всех отражений, геологическая информативность кото-
рых обоснована при идентификации данных каротажа и сейсмораз-
ведки, а также расчета комплекса атрибутов – динамических, спек-
тральных, кинематических, необходимых для оценки значений кри-
териев детального районирования по типам разреза и прогнозной
оценки коллекторских свойств.
7. Построение модели целевого комплекса отложений, включающей
литофациальную зональность, структурно-тектонические характери-
стики с приведением картируемых границ к геологическим реперам,
прогноз коллекторских свойств во внескважинном пространстве по
результатам, полученным на предыдущих этапах и данным промы-
слово-геологических исследований.
Технология ИНТЕГРАН получила широкую апробацию на ряде
крупных месторождений нефти и газа, включая Астраханское газоконден-
сатное (Прикаспийская провинция), Оренбургское газоконденсатное (Волго-
Уральская провинция), Ново-Уренгойское, Суамутское и Кынское (Западно-
Сибирская провинция), что обеспечило ее внедрение в геологические орга-
низации России: Ямалгеофизика, Оренбург-геология, Восток-геология и др.
В заключение раздела подчеркнем, что сравнение технологий ГЕМ-
МА, ПАРМ-КОЛЛЕКТОР, ИНТЕГРАН и других подобных систем, напри-
мер, технологий СВАН и НЕДРА (СВАН – спектрально-временной анализ
для картирования типов геологического разреза – авторы Е.А. Давыдова,
Е.А. Копилевич, И.А. Мушин, НЕДРА – технология интерпретации назем-
но-скважинных измерений Краснодарской опытно-методической экспеди-
ции «Союзморгео» – автор Д.П. Земцова) по комплексной интерпретации
данных сейсморазведки и геофизических исследований скважин имеют
много общего в постановке задачи, различаясь использованием тех или
иных сейсмических атрибутов, а также критериями по увязке сейсмических
и каротажных данных и прогнозу коллекторских свойств.
7.4. Технологии количественной комплексной интерпретации
данных наземных геофизических методов
Количественная комплексная интерпретация геофизических данных,
в отличие от комплексного анализа, требует реализации достаточно слож-
ных алгоритмов по решению прямых и обратных задач геофизики. Ее ре-
зультатом является построение комплексных согласованных физико-
геологических моделей среды или отдельных объектов. Ввиду отсутствия
общей теории комплексной интерпретации геофизических данных, боль-
шинство компьютерных технологий комплексной интерпретации ориенти-
ровано, в основном, на построение моделей по данным двух наземных ме-
тодов. Исключение составляет ГИС-ИНТЕГРО-ГЕОФИЗИКА, рассмотрен-
ная в разделе 6.4.
Достаточно много технологий создано по количественной ком-
плексной интерпретации данных сейсморазведки и гравиразведки. Для
решения прогнозно-поисковых задач на нефть и газ выделяется технология
GCIS (Ухтинский технический госуниверситет – авторы А.И. Кобрунов и
А.П. Петровский). Технология основана на совместном решении обратных
задач сейсморазведки и гравиразведки. При этом изучаемый объект задается
в виде модели слоистой среды, с априори заданными скоростными и плот-
ностными характеристиками (атрибутами). Интерпретация сейсмических
данных осуществляется в рамках кинематической задачи. Несмотря на то,
что скоростные
ξ
и плотностные f границы могут не быть тождественными,
но достаточно близки между собой, поскольку скоростная слоистая
ξ
и
плотностная слоистая f модели являются образами одного и того же геоло-
гического объекта. Построение согласованной сейсмоплотностной (согласо-
вание по скорости и по плотности) модели среды осуществляется путем ми-
нимизации обобщенного функционала Ф(
ξ
,,f) на основе интерактивного
подбора. При этом предполагается, что минимум такого функционала
Ф(
ξ
,,f) реализуется при условии соответствия с одной стороны, скоростной
модели волновому полю отражений ОГТ, а с другой стороны, плотностной
модели – гравитационному полю наблюдений. При каждом фиксированном
векторе параметров среды индекс
ξ
означает, что «сейсмические» границы
ξ
зафиксированы и вошли в конструкцию функционала. Аналогично при каж-
дом фиксированном f функционал Ф(
ξ
,,f) представляет собой критерий оп-
тимальности на множестве эквивалентности для плотностных границ. Ите-
рационный процесс состоит в последовательном нахождении решений, при
котором результат, полученный при интерпретации данных гравиразведки
передается для конструирования функционала по данным сейсморазведки и
последующего нахождения решения, далее найденное решение для сейсмо-
разведки передается для конструирования функционала по данным грави-
разведки и так далее. Описанный итерационный процесс сходится. Его ре-
зультатом является пара слоистых моделей – скоростная и плотностная,
максимально близких между собой насколько это допустимо согласованно-
стью волнового и гравитационного полей. Важным элементом приведенной
технологии является параметризация модели среды, определяющая допус-
тимые виды моделей в данной конкретной геологической ситуации, выра-

жаемые через варьируемые в процессе решения обратной задачи параметры
среды. Параметром служит одна единственная функция – функция Лагран-
жа, через которую и критерий оптимальности выражаются все границы сре-
ды. В рамках параметризации используется аппроксимация среды наборами
призм, что обеспечивает расчет прямой задачи. Технология GCIS развивает-
ся путем математического моделирования динамики формирования изучае-
мого объекта, результаты которого является последовательность статисти-
ческих моделей, а параметризация заключается в оценке параметров по
управлению динамикой процесса формирования углеводородов.
Для построения согласованных сейсмоплотностных моделей глубин-
ного строения земной коры и верхней мантии следует отметить программ-
ные комплексы института геофизики Национальной академии наук Украи-
ны созданные под руководством В.И. Старостенко.
Компьютерная технология комплексной интерпретации данных
сейсморазведки и электроразведки по методу зондирования становлением
поля в ближней зоне (ЗСБ) создана в НВНИИГГ и ЗАО «Геонефтегаз» под
руководством Н.П. Смилевец. Эта технология реализует построение согла-
сованных сейсмоэлектрических временных разрезов (СЭВР) при решении
прогнозно-поисковых задач нефтегазовой геологии. В ее основе заложено
использование практически функциональной зависимости между t
0
времен-
ных сейсмических разрезов и временем становления поля t
ЗСБ
, а именно
ЗСБ
tat =
0
. Величина коэффициента связи «а» меняется от 0,5 до 0,8 для
различных типов пород. Коэффициент «а» является функцией средней ско-
рости и удельной электропроводности горизонтально-слоистой модели гео-
логического разреза. Переход к глубинам контактных поверхностей разреза
осуществляется на том основании, что в сейсморазведке аналогом глубины
является время отраженных волн t
0
, а в электромагнитной разведке анало-
гом кажущейся глубины исследований – соответственно величина
ЗСБ
t
.
Для высокоскоростных и высокоомных отложений (это модели соляных ку-
полов, сложенных породами сульфатно-карбонатного состава) отмечается
возрастание коэффициента «а» с глубиной исследований, при этом «а» ра-
вен 0,6. Для разрезов, представленных терригенными (проводящими) отло-
жениями, величина коэффициента «а» составляет 0,8.
Необходимым условием для достоверного построения согласованных
сейсмоэлектрических временных разрезов является совпадение электромаг-
нитных зондирований с сейсмическими пикетами по линии общего профи-
ля. Относительные погрешности определения коэффициента «а» составляют
5-10 % в интервале глубин 2 – 5 км, максимальные значения погрешностей
«а» отмечаются в пределах склона соляных куполов и в мульдах, которые
доходят до 20-30 %.
По различным типам зависимостей
)(
ЗСБ
tfa =
осуществляется
прогноз литологии и нефтегазоносности коллекторов при поисково-
разведочных работах, а по данным зависимости
ЗСБ
tat =
0
– более точная
привязка по глубине залегания горизонтов (контактных поверхностей).
Развитием технологии СЭВР является технология COMINTER,
включающая программно-алгоритмическое обеспечение по преобразованию
данных электромагнитных и потенциальных (гравитационных и магнитных)
полей в масштаб временного сейсмического разреза. Это позволяет в еди-
ном координатном пространстве (x, t) обеспечить построение согласованно-
го по физическим параметрам (скорости, электропроводности, плотности)
временного разреза с целью более надежного прогноза литологии и нефте-
газоносности коллекторов. Пример построения такой согласованной физи-
ко-геологической модели приведен на рис.7.12. В связи с технологией COM-
INTER, предназначенной в основном для поисков углеводородов на глуби-
нах 2 – 3,5км, отметим технологию ГИС – ИНТЕГРО – ГЕОФИЗИКА, рас-
смотренную в разделе 6.5 и предназначенную для построения согласован-
ных по физическим и геометрическим параметрам моделей земной коры до
глубин 40км и более по региональным опорным профилям.
Компьютерная технология комплексной интерпретации данных
гравиразведки и магниторазведки СИГМА-3D создана под руководством
Ю.И. Блоха в ФГПУ «Аэрогеофизика» [7]. Эта технология реализует по-
строение согласованных по плотности и магнитной восприимчивости 2-D и
3-D моделей геосреды, в частности, модели кристаллического фундамента.
Ведущей в технологии СИГМ-3D является комплекс программ REIST, обес-
печивающий построение модели субгоризонтального слоя с латерально из-
меняющимися намагниченностью и плотностью. Верхняя кромка модели-
руемого слоя задается, например, по данным сейсморазведки или электро-
магнитных зондирований, или на основе корреляционного зондирования
полей. Нижняя кромка слоя принимается горизонтальной, а ее амплитуда
оценивается по спектру интерпретируемого поля. В то же время и нижняя
граница может быть задана из тех же априорных данных, что и верхняя. Для
решения обратных задач гравиразведки и магниторазведки сформирован-
ный субгоризонтальный слой аппроксимируется совокупностью квадрат-
ных, либо треугольных в плане вертикальных однородных призм, располо-
женных в один этот слой. Элементарные призмы располагаются не только в
областях съемки, но и на обрамлении исследуемого участка (территории)
для учета
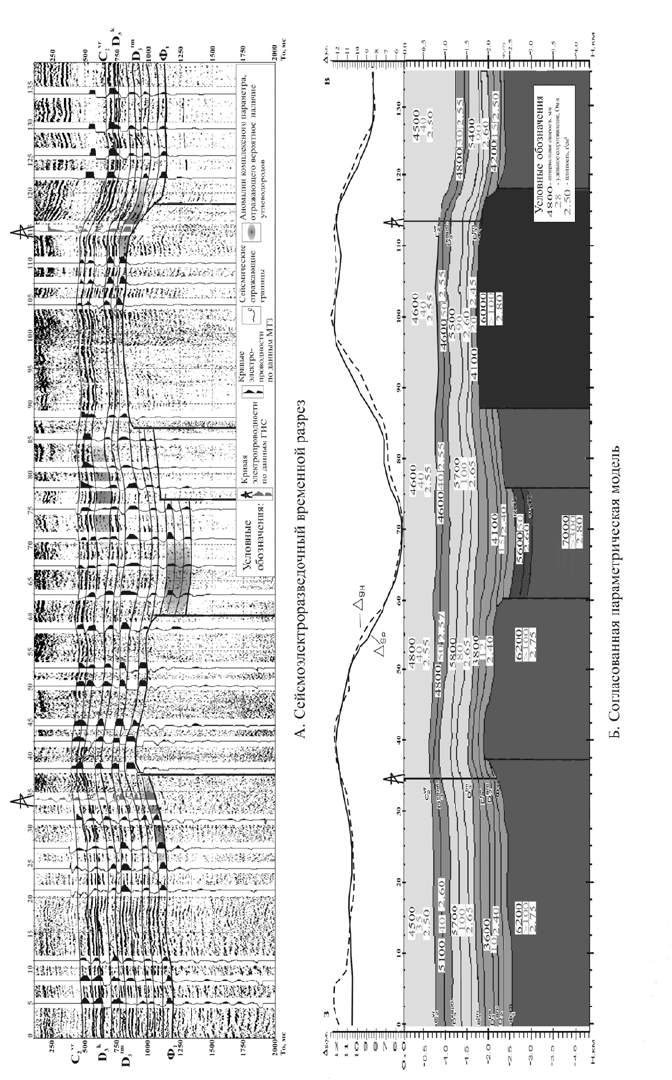
Рис.7.12. Пример построения региональной согласованной модели разреза на основе комплексной интерпретации
данных сейсмо-, электро- и гравиразведки в единой информационной среде.
краевых эффектов. Размер призм в плане выбирается исходя из сред-
ней глубины залегания верхней границы слоя и примерно принимается ей
равным.