Кулик Ю.А. Электрические машины
Подождите немного. Документ загружается.

§ 4.6. РАБОТА АСИНХРОННОЙ МАШИНЫ В РЕЖИМЕ ДВИГАТЕЛЯ
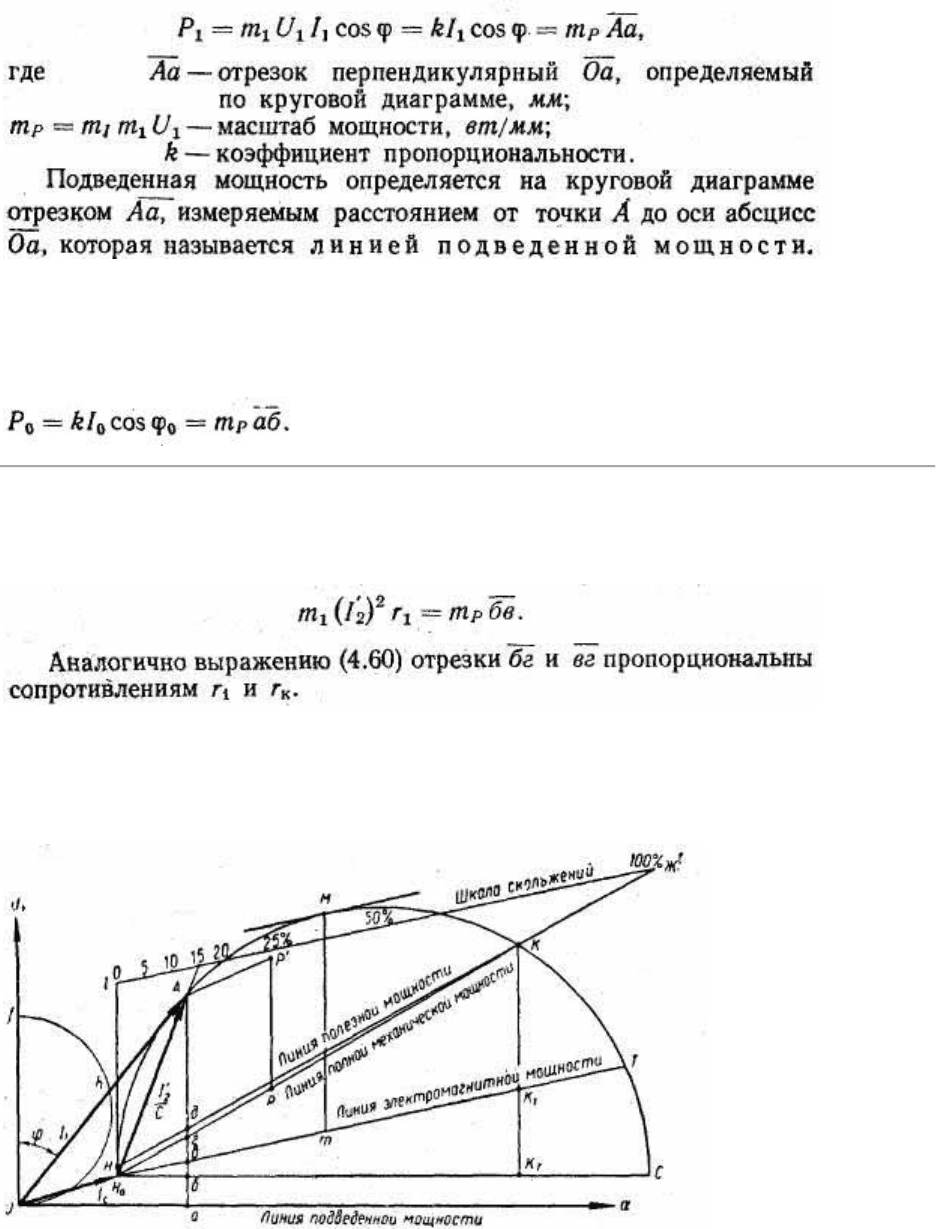
Определение мощностей, потерь и к. п. д. по круговой диаграмме. Измеряя отдельные
отрезки круговой диаграммы (рис. 4.38), можно, с учетом принятых масштабов,
определить мощность и потери асинхронного двигателя:
1. К обмотке статора подводится из сети первичная электрическая мощность
2. Потери в намагничивающем контуре складываются из потерь Р
с1
в стали статора и
потерь Р
э0
в первичной обмотке от тока I
0
. Сумма этих потерь определяется активной
составляющей тока I
0
.
3. При нагрузке возникают потери в обмотке статора, вызванные составляющей
приведенного тока ротора
4. В теории переменных токов доказывается, что линия электромагнитной мощности
проходит через две точки, в которых электромагнитная мощность равняется нулю. Такими
точками является точка синхронного хода H
0
и точка Т, соответствующая бесконечной
251
Рис. 4.38. Определение мощностей и моментов по круговой диаграмме
скорости вращения. Следовательно, Н
0
Т есть линия электромагнитной мощности.
Поэтому электромагнитная мощность ротора, передаваемая ему от статора
где Р
э2
— электрические потери в обмотке ротора;
Выражение электромагнитной мощности можно представать в следующем виде:
или
где Р
м
— мощность преобразуемая из электрической в механическую.
Линия, соединяющая точку синхронного хода Н
0
с точкой К. короткого замыкания,
называется линией полной механической мощности.)
252
7. Часть полезной механической мощности тратится на покрытие механических Р
мех
и
добавочных Р
д
потерь. Для их определения надо соединить прямой линией точки
короткого замыкания К и холостого хода H, в которых полезная мощность двигателя
равна нулю. Линия НК называется линией полезной мощности.
Коэффициент полезного действия асинхронного двигателя
Значение к. п. д., определенное из этого выражения, не является достаточно точным, так
как круговая диаграмма учитывает не все добавочные потери. Вообще графическое
определение к. п. д. по круговой диаграмме является принципиально неточным, так как
рабочие точки круговой диаграммы расположены на небольшой дуге.
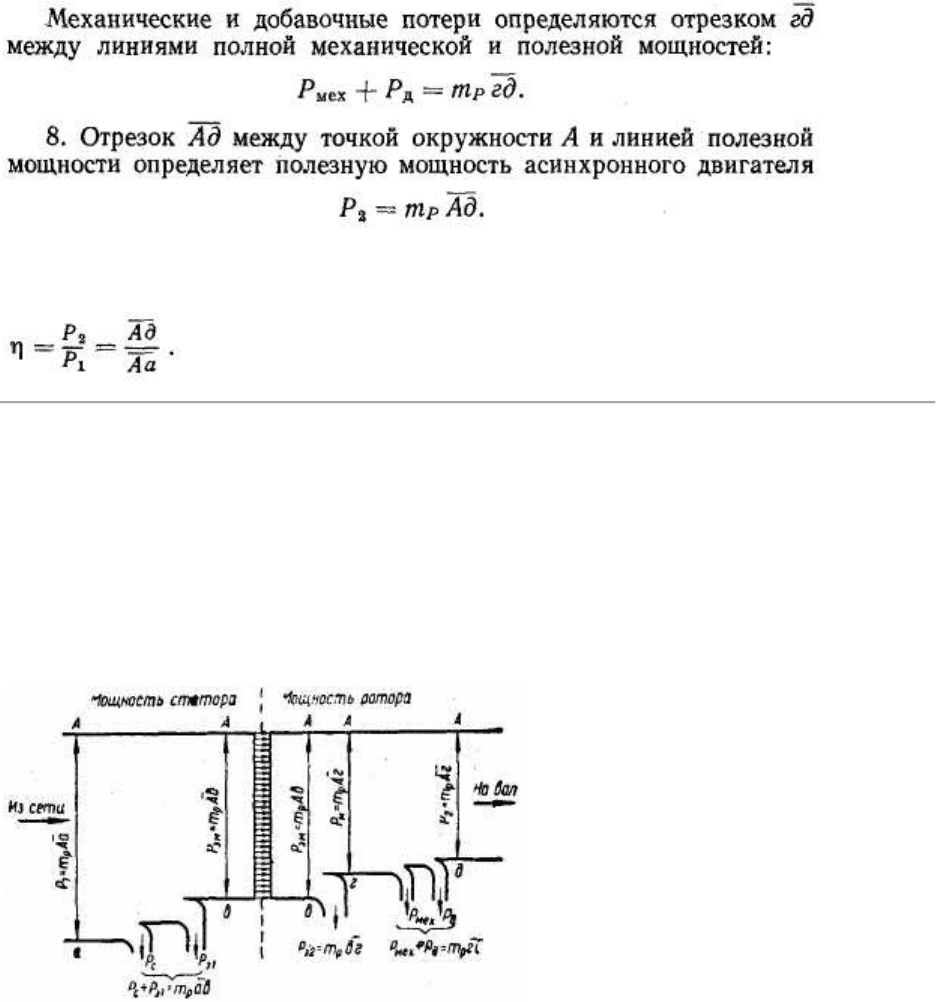
Энергетическая диаграмма. Проследим уменьшение мощности асинхронного двигателя
при последовательном прохождении точек абвг (см. рис. 4.38). Отложим от прямой АА
(рис. 4.39) расстоя-
Рис. 4.39. Энергетическая диаграмма асинхронного двигателя
253
Диаграмма рис. 4.39 является энергетической диаграммой асинхронного двигателя.
Анализируя ее, можно наглядно представить баланс мощностей двигателя.
Электромагнитный момент. Поток, передающий электромагнитную мощность Р
эм
со
статора на ротор, вращается с угловой частотой
С учетом формул (4.61), (4.41) и (4.38, а) электромагнитный момент равен
Из выражения (4.64) следует, что электромагнитный момент пропорционален потоку
машины и активной составляющей тока ротора.
Найдем уравнение электромагнитного момента, выраженного через параметры
асинхронного двигателя. Пользуясь (4.62), можно написать
Подставляя (4.66) в (4.65), получаем
254
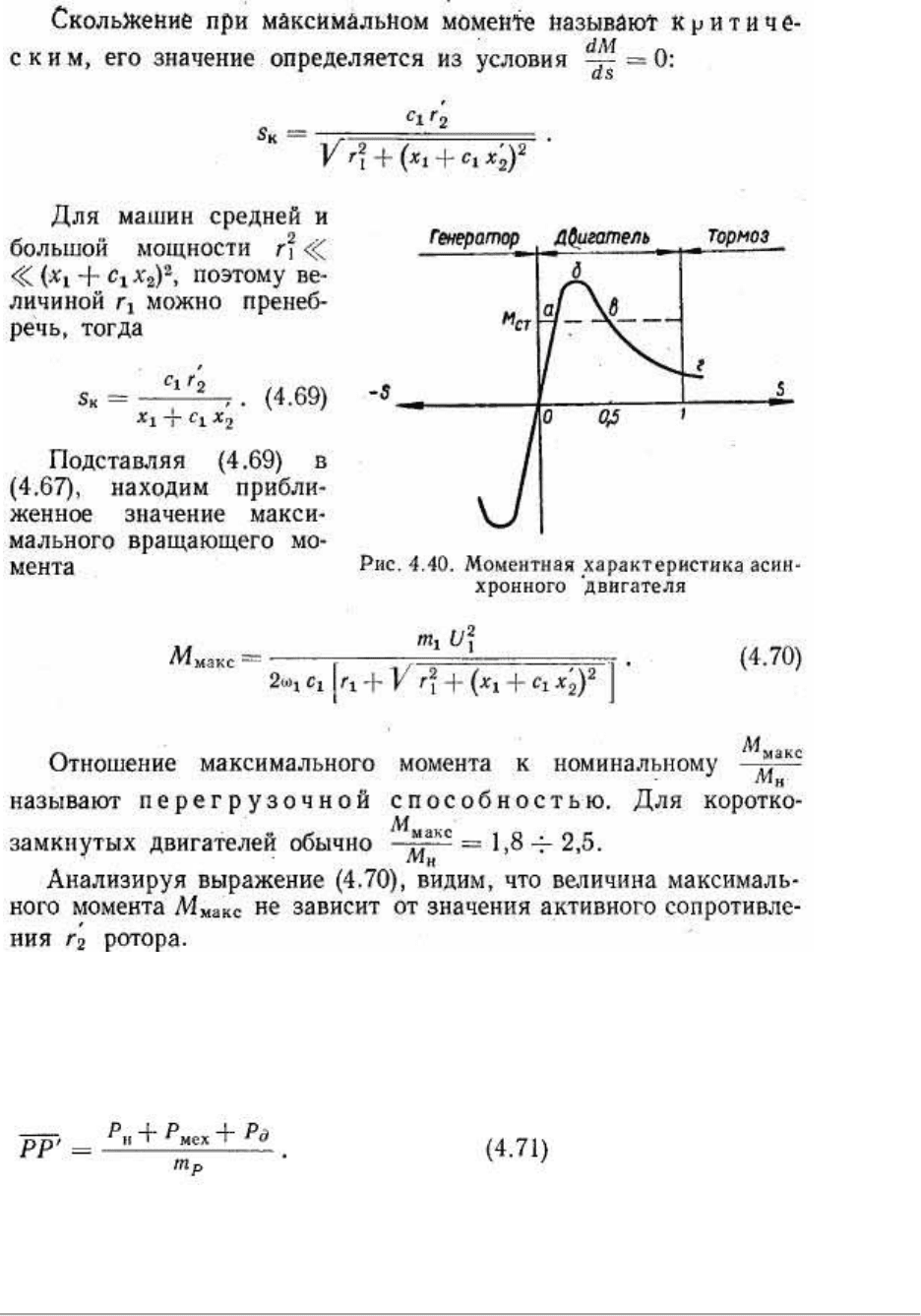
Согласно (4.67) электромагнитный момент асинхронной машины является функцией
скольжения s (рис. 4.40). При данном значении скольжения электромагнитный момент
пропорционален квадрату напряжения U
1
сети.
Подставляя в (4.67) s=1, находим выражение момента при неподвижном роторе
255
Определение скольжения, моментов и коэффициента мощности по круговой
диаграмме. Для определения номинального момента необходимо отыскать на круговой
диаграмме точку номинального режима. Для этого перпендикулярно оси абсцисс Оα (см.
рис. 4.38) в произвольной точке Р на линии Н
0
К откладывают отрезок
Параллельно линии Н
0
К из точки Р' проводят прямую Р'А до пересечения с окружностью
токов. Точка пересечения А яв-
ляется точкой номинального режима. Номинальный электромагнитный момент
256
Для определения максимального момента параллельно линии электромагнитной
мощности Н
0
Т проводят в точке М касательную к окружности токов. Перпендикулярно к
оси абсцисс из точки М проводят прямую Mm до пересечения с линией электромагнитной
мощности Н
0
Т. Максимальный момент
В начальный момент пуска скольжение s=1. Поэтому для определения пускового момента
нужно из точки К привести перпендикулярно к оси абсцисс прямую KK
1
до пересечения с
линией электромагнитной мощности. Начальный момент
Начальный момент в относительных единицах
Однако для определения начального момента двигателя с ко-роткозамкнутым ротором
круговой диаграммой обычно не пользуются, так как она не учитывает насыщения и
вытеснения тока при пуске.
257
(см. рис. 4.34, в) длины вектора тока, отсекаемого этой полуокружностью, к диаметру
равно коэффициенту мощности
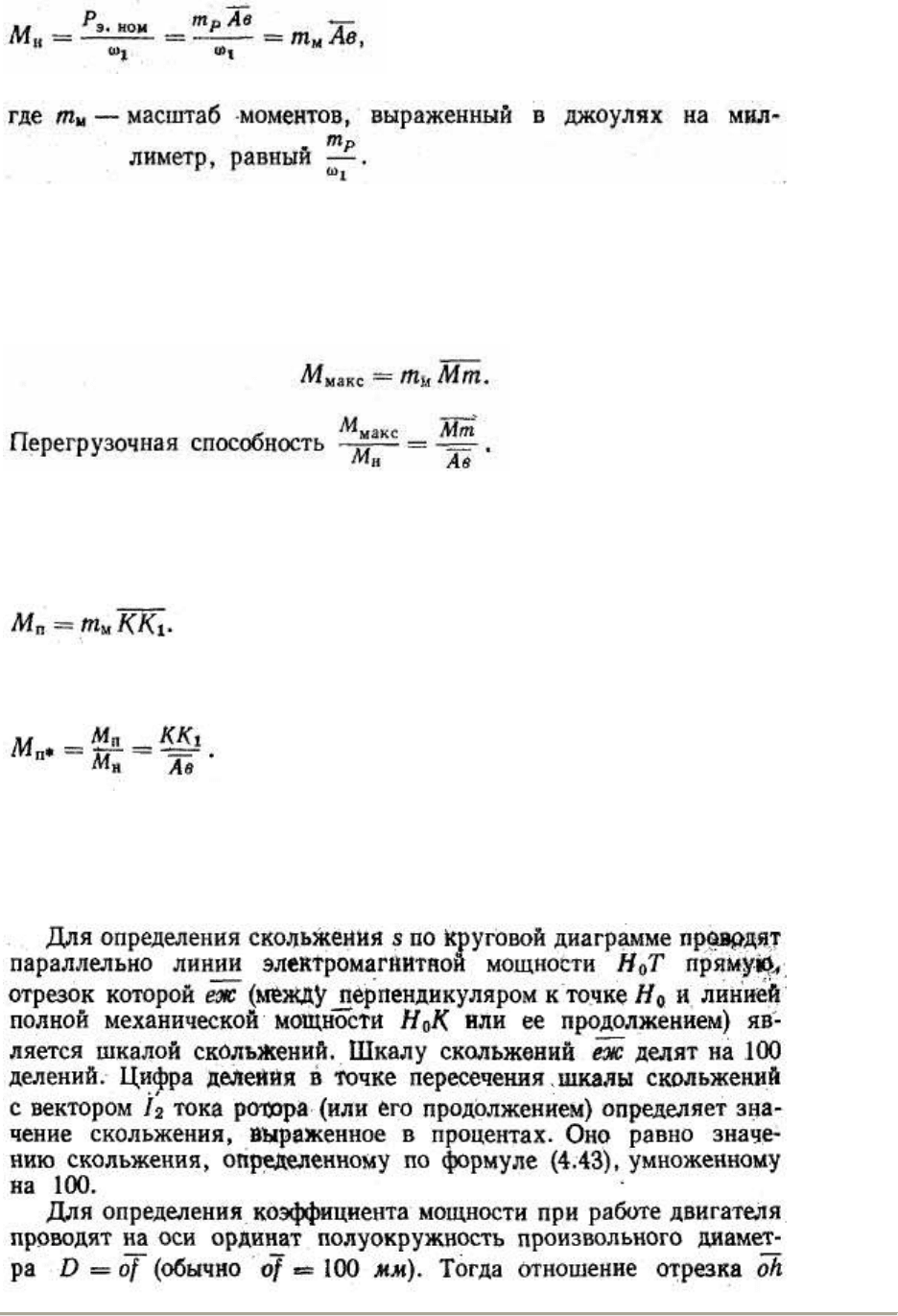
Использование круговой диаграммы для построения рабочих характеристик.
Рабочий процесс двигателя изображается на круговой диаграмме небольшим отрезком
окружности, соответствующим скольжению от нуля до номинального. Поэтому данные
для рабочего режима из круговой диаграммы не могут быть найдены с достаточ-
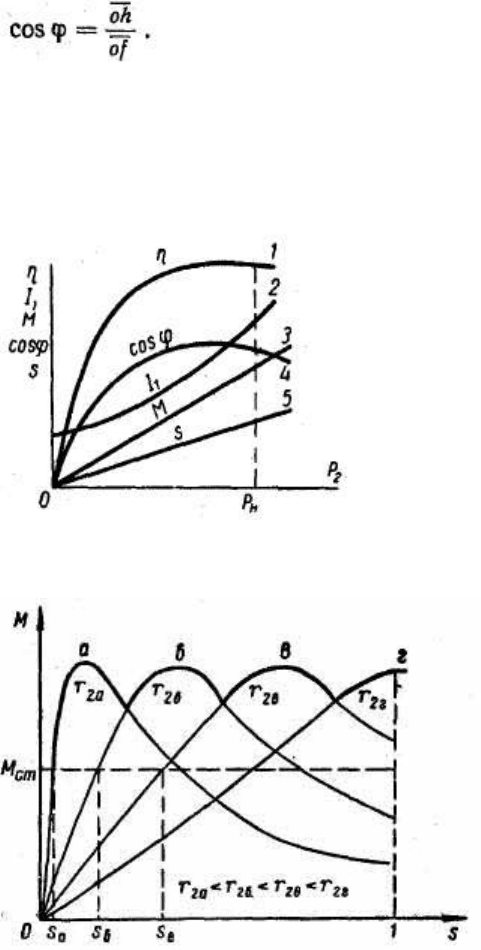
Рис. 4.41. Рабочие характеристики асинхронного двигателя
Рис. 4.42. Моментные характеристики при разных значениях активного сопротивления r
2
в цепи ротора
ной точностью. Обычно по круговой диаграмме определяют для заданной мощности токи
I
1
, I'
2
и cosφ, а все остальные величины рассчитывают, пользуясь этими данными.
Круговая диаграмма может служить для ориентировочного расчета моментальной
характеристики М = f (s) двигателя с фазным ротором в диапазоне скольжений s от 0 до 1.
С помощью круговой диаграммы определяют приблизительное значение максимального
момента M
макс
и критического скольжения s
k
. При приближенном анализе для построения
характеристик двигателя в диапазоне от холостого хода до номинального режима по
круговой диаграмме определяют обычно следующие величины: полезный момент М
2
, ток
статора I
1
, скольжение s, к. п. д. η и коэффициент мощности соsφ. Зависимость этих
величин от полезной мощности Р
2
называют рабочими характеристиками. Рабочие
характеристики асинхронных двигателей могут быть найдены из опыта, из расчета и по
258
круговой диаграмме. В последнем случае задаются несколькими значениями мощности Р
2
(от нуля до номинальной Р
н
) и определяют соответствующую точку круговой диаграммы,
пользуясь выражением (4.71), в которое вместо номинального значения мощ-
Из (4.72) видно, что скольжение пропорционально потерям в обмотке ротора. При
синхронном ходе потери равны нулю. По мере увеличения нагрузки растут потери, а
следовательно, согласно выражению (4.72), и скольжение s. На рис. 4.41 (кривая 5) видно,
что при Р
2
=0 скольжение s принято равным нулю, в действительности при холостом ходе
имеется некоторое, весьма незначительное скольжение.
Если бы скорость вращения двигателя была неизменной, то полезный момент М
2
изменялся бы пропорционально мощности Р
2
. Учитывая формулу (4.48), можно записать
Из этого выражения видно, что поскольку скольжение при увеличении Р
2
растет, а
пропорциональная зависимость нарушается, момент возрастает несколько быстрее
(кривая 3 на рис. 4.41).
При синхронном ходе ток статора I
1
равен I
С
. С увеличением тока ротора зависимость
тока I
1
от Р
2
по мере нагрузки двигателя приближается к линейной (кривая 2 на рис. 4.41).
Намагничивающий ток, потребляемый двигателем из сети, не зависит от нагрузки, а
активная составляющая тока I
1
с ростом нагрузки увеличивается. Поэтому при малых
нагрузках коэффициент мощности низок и растет с увеличением нагрузки. Отсюда ясно,
что для обеспечения высокого коэффициента мощности сети асинхронные двигатели
должны работать при нагрузке, близкой к номинальной. При больших скольжениях
коэффициент мощности может несколько уменьшаться (кривая 4) за счет роста
индуктивного сопротивления ротора x
2s
.
Пуск двигателя с фазным ротором. При увеличении активного сопротивления r
2
ротора
моментные характеристики, согласно (4.67), меняют свой вид (рис. 4.42). Максимальный
момент остается неизменным, но смещается в сторону больших скольжений.
259
Если считать, что с
1
= 1, то, подставляя в выражение (4.69) s
k
= 1, найдем, что
максимальный момент будет пусковым при r'
2
= х
k
. Для двигателей общепромышленного
применения это равенство имеет место в случае, если в цепь обмотки ротора ввести
добавочное активное сопротивление r
д
.
Для возможности введения в цепь ротора активного сопротивления двигатели выполняют
с фазным ротором. Обмотка фазного ротора имеет такое же число фаз, как и статорная
(обычно m
2
= 3). Начала фаз обмотки ротора присоединяют к контактным кольцам,
которые при пуске через щеточные контакты присоединяют к реостату, а при работе
замыкают накоротко. В двигателях малых и средних мощностей применяются
проволочные пусковые реостаты с воздушным или масляным охлаждением, в двигателях
больших мощностей — водяные.
При введении в цепь ротора активного сопротивления пусковой ток уменьшается, а
пусковой момент увеличивается. Физически это объясняется тем, что хотя при введении
активного сопротивления ток ротора уменьшается, его активная составляющая I
2
cosψ
2
увеличивается, поэтому, согласно формуле (4.64), увеличивается и момент. Таким
образом, при пуске двигателя с фазным ротором обеспечивается высокий момент при
сравнительно небольшом токе.
Способы пуска короткозамкнутых двигателей. Современные мощные электрические
сети обычно допускают прямое включение короткозамкнутых двигателей. Пусковые
свойства асинхронных двигателей характеризуют кратность начального пускового
момента
260