Кулик Ю.А. Электрические машины
Подождите немного. Документ загружается.

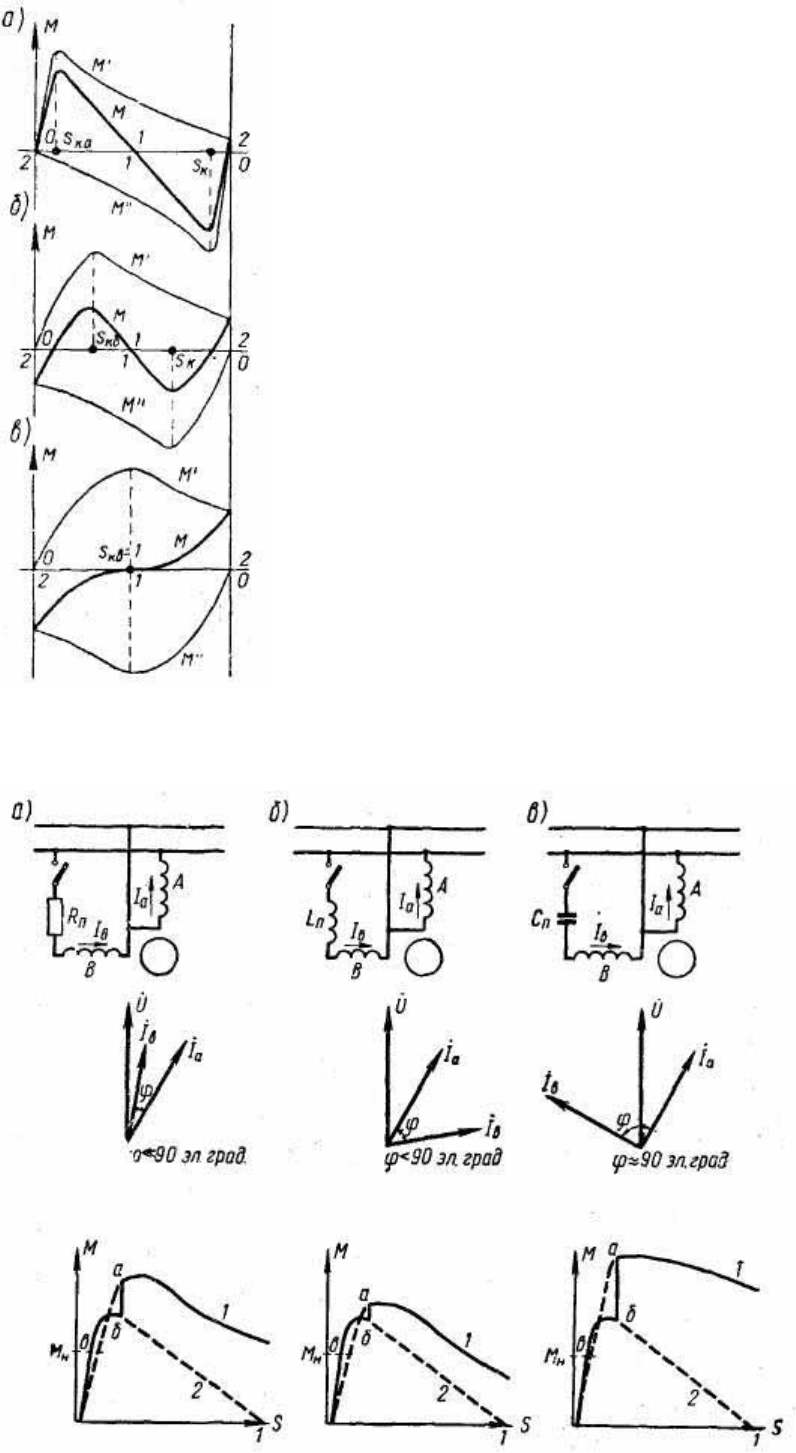
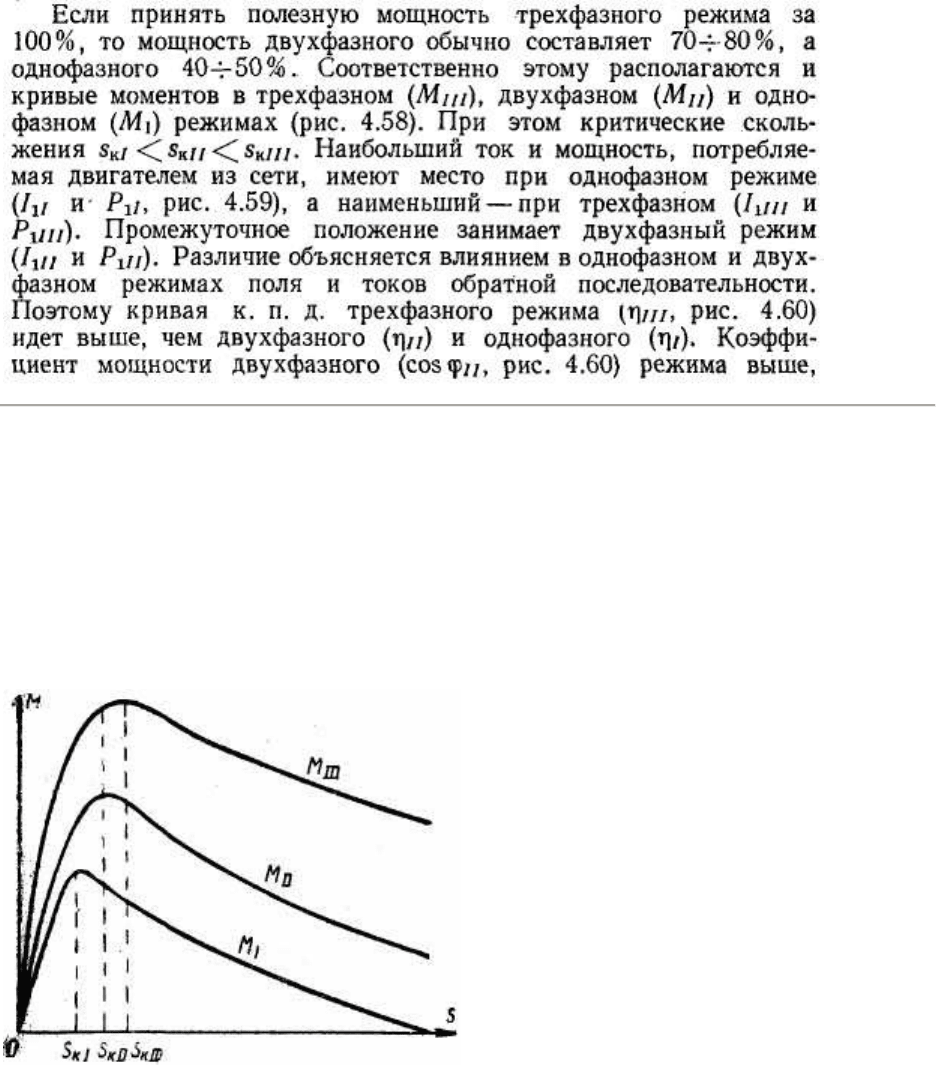
Рис. 4.53. Моментные характеристики однофазного асинхронного двигателя при различных активных
сопротивлениях обмотки ротора
271
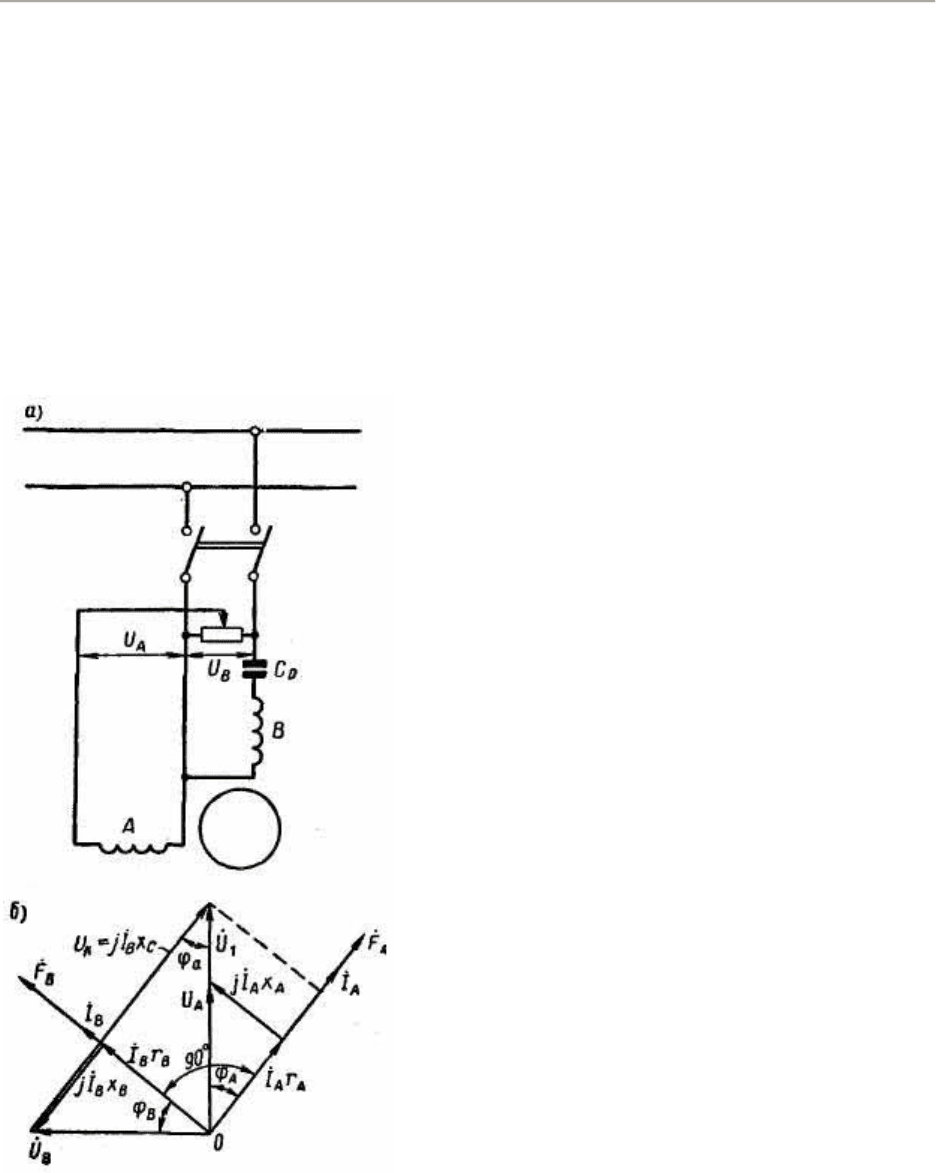
Рис. 4.54. Схемы соединения, векторные диаграммы токов обмоток и моментные характеристики
двигателей: а — с пусковым активным сопротивлением; б — с пусковой индуктивностью; в — с пусковой
емкостью
Конденсаторные двигатели. Однофазные двигатели, в цепь обмотки статора которых
включена емкость, называются конденсаторными. Конденсаторные двигатели, питаемые
от однофазной сети, по способу образования магнитного поля чаще всего являются
двухфазными. Двигатели имеют на статоре две обмотки, обычно с неодинаковым числом
витков, оси которых сдвинуты в пространстве на 90° (рис. 4.55, а).
Вследствие временного сдвига тока в подключенной через конденсатор обмотке В
создается вращающаяся м. д. с, которая является круговой в случае, если м. д. с. фаз
обмоток F
a
и F
b
равны и сдвинуты по времени на 90 эл. град. Это условие (рис. 4.55, б)
может выполняться только при определенном подборе емкости, напряжений и чисел
витков обмоток А и В. При изменении скорости вращения двигателя изменяются
сопротивления обмотки В,
Рис. 4.55. Управляемый конденсаторный двигатель: а — схема соединения обмоток; 6 — векторная
диаграмма
272
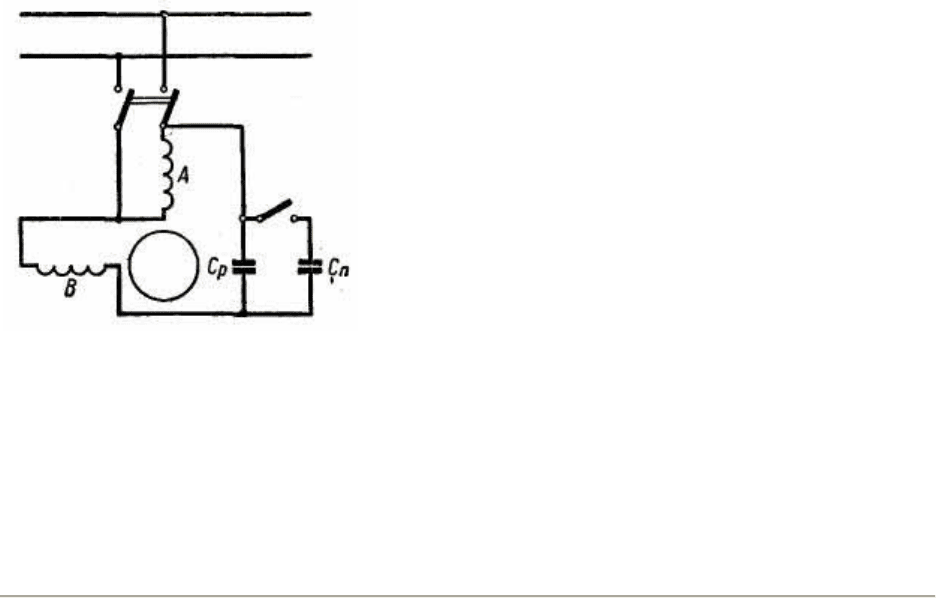
Рис. 4.56. Схема конденсаторного двигателя с рабочей и пусковой емкостью
вследствие чего напряжение между обмоткой и конденсатором U
k
перераспределяется, что
вызывает изменение величины и фазы тока I
в
. Поэтому равенство м. д. с. F
a
и F
b
при
данном соотношении чисел витков и напряжений обмоток существует только при одной
определенной скорости вращения. Таким образом, круговое поле в двигателе имеет место
лишь при определенном значении емкости
конденсатора, скорости вращения, напряжения и чисел витков обмоток. При изменении
какой-либо из этих величин (например, скорости вращения) поле становится
эллиптическим.
Иногда для того, чтобы при новой скорости вращения получить круговое поле, изменяют
напряжение на обмотке А и величину емкости конденсатора (рис. 4.55). При некоторых
соотношениях напряжений на обмотках и чисел их витков ни при какой скорости
вращения невозможно подобрать такую емкость, чтобы получить круговое поле.
В случае, когда поле однофазного конденсаторного двигателя близко к круговому, его
рабочие характеристики приближаются к характеристикам трехфазного двигателя, а
некоторые пусковые могут быть даже более благоприятными.
Конденсаторные двигатели выполняются с пусковой (см. рис. 4.54, в), с пусковой и
рабочей (рис. 4.56) или только с постоянно включенной рабочей емкостью (см. рис. 4.55,
а).
В двигателях с пусковой емкостью круговое магнитное поле создается в момент пуска. По
мере разгона двигателя поле становится резко эллиптическим. При достижении скорости
порядка 80% номинальной пусковая обмотка отключается центробежным выключателем
или при помощи реле. Поэтому рабочие характеристики такие же, как и у обычных
однофазных двигателей с однофазной обмоткой на статоре. Пусковые характеристики
двигателей с пусковой емкостью являются весьма благоприятными: пусковой момент М
п
= (1,7 ÷ 2,4)М
н
, пусковой ток I
п
= (3 ÷ 5)I
н
.
В двигателях с постоянно включенной рабочей емкостью круговое поле создается при
номинальном или близком к нему режимах. Двигатели имеют хорошие рабочие
характеристики: повышенный момент, коэффициент мощности (cosφ =0,8÷0,95) и к. п. д.
(η = 65÷75%). В момент пуска поле становится резко эллиптическим, в результате чего
273
двигатели имеют небольшой пусковой момент, обычно не превышающий 30% от
номинального. Такие двигатели применяются только для легких условий пуска.
В двигателях спусковой и рабочей емкостями на время пуска параллельно с рабочей
емкостью включается значительная пусковая емкость, в результате чего поле при пуске
приближается к круговому. Пусковой момент у двигателей приблизительно такой же, как
и у двигателей с одной пусковой емкостью, а пусковой ток несколько больше I
п
= (4÷6)I
н
.
При скорости вращения, близкой к номинальной, пусковая емкость отключается, и
вращающееся поле создается за счет рабочей емкости, поэтому данные двигатели имеют
такие же рабочие характеристики, как и двигатели с одной рабочей емкостью.
Если после окончания пуска не отключить пусковую емкость, поле становится резко
эллиптическим, и рабочие характеристики значительно ухудшаются.
Трехфазный асинхронный микродвигатель при двух- и однофазном питании.
Асинхронный короткозамкнутый микродвигатель, на статоре которого помещена
трехфазная обмотка, обычно имеет шесть выводных концов (начало и конец каждой
фазы). В зависимости от соединения соответствующим образом фаз обмотки статора
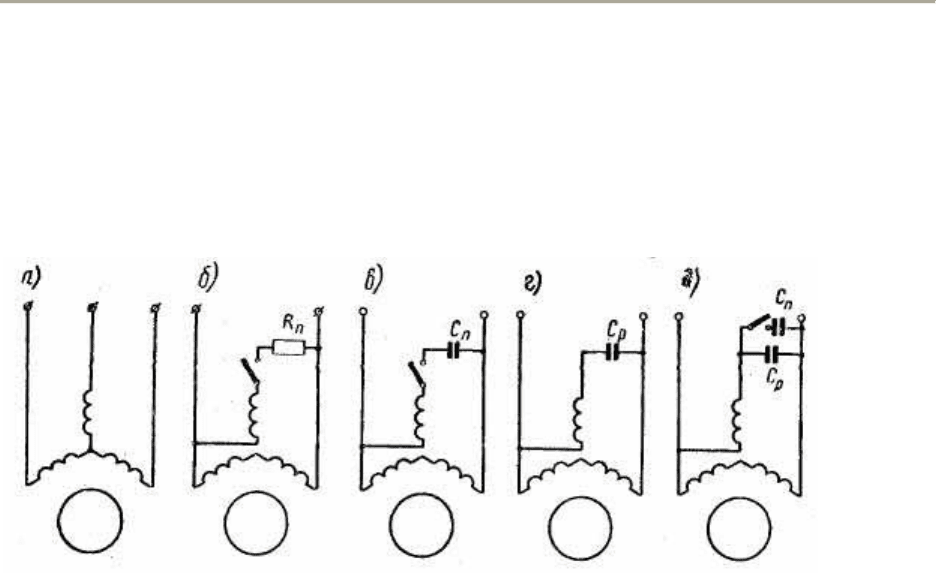
двигатель может работать как трехфазный (рис. 4.57, а), однофазный с пусковым
сопротивлением (рис. 4.57, б), как однофазный конденсаторный с пусковой емкостью
(рис. 4.57, в), с постоянно
Рис. 4.57. Схемы соединения асинхронного микродвигателя: а — трехфазная; б — однофазная с пусковым
сопротивлением; в — однофазная с пусковой емкостью; г — однофазная с рабочей емкостью; д —
однофазная с пусковой и рабочей емкостями
включенной рабочей емкостью (рис. 4.57, г) и с пусковой и рабочей емкостями (рис. 4.57,
д). При однофазном питании двухфазная обмотка двигателя образуется путем
последовательного соединения двух фаз трехфазной обмотки статора и параллельного
соединения третьей фазы через емкость или сопротивление. Существуют и другие схемы.
Во всех случаях напряжение питания равно линейному напряжению трехфазной сети.
274
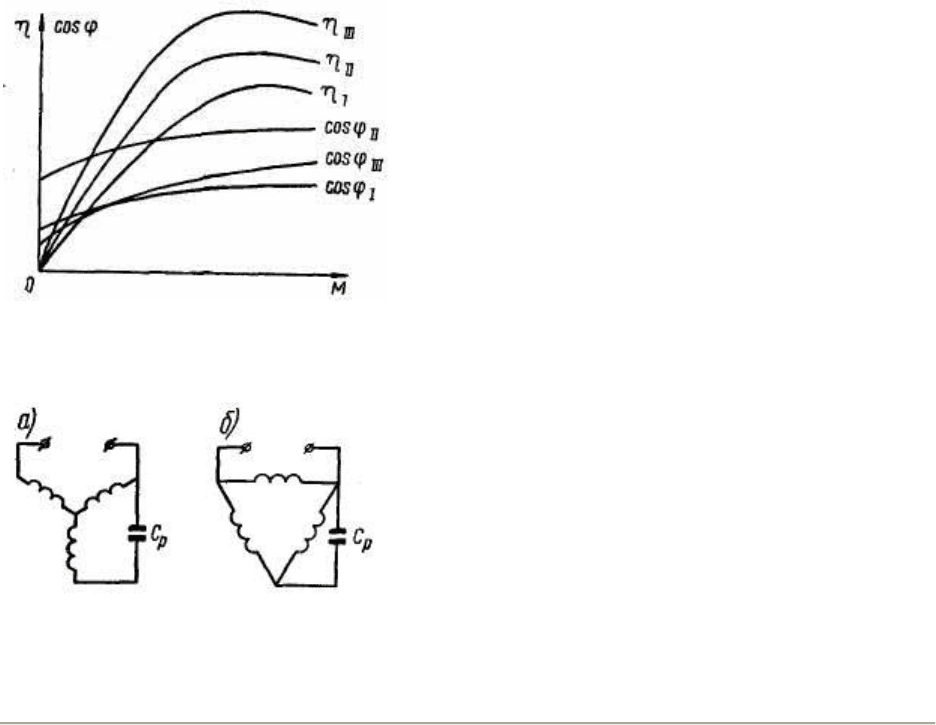
чем трехфазного (cosφ
III
) и однофазного (cosφ
I
) за счет емкостного тока конденсатора.
Иногда промышленный трехфазный короткозамкнутый асинхронный двигатель
используют как однофазный конденсаторный (рис. 4.61). В этом случае его мощность
должна быть снижена примерно до 3/4 номинальной.
В случае присоединения трехфазного двигателя к однофазной сети, м. д. с. высших
пространственных гармоник проявляется
Рис. 4.58. Моментные характеристики асинхронного двигателя при различных схемах питания
275
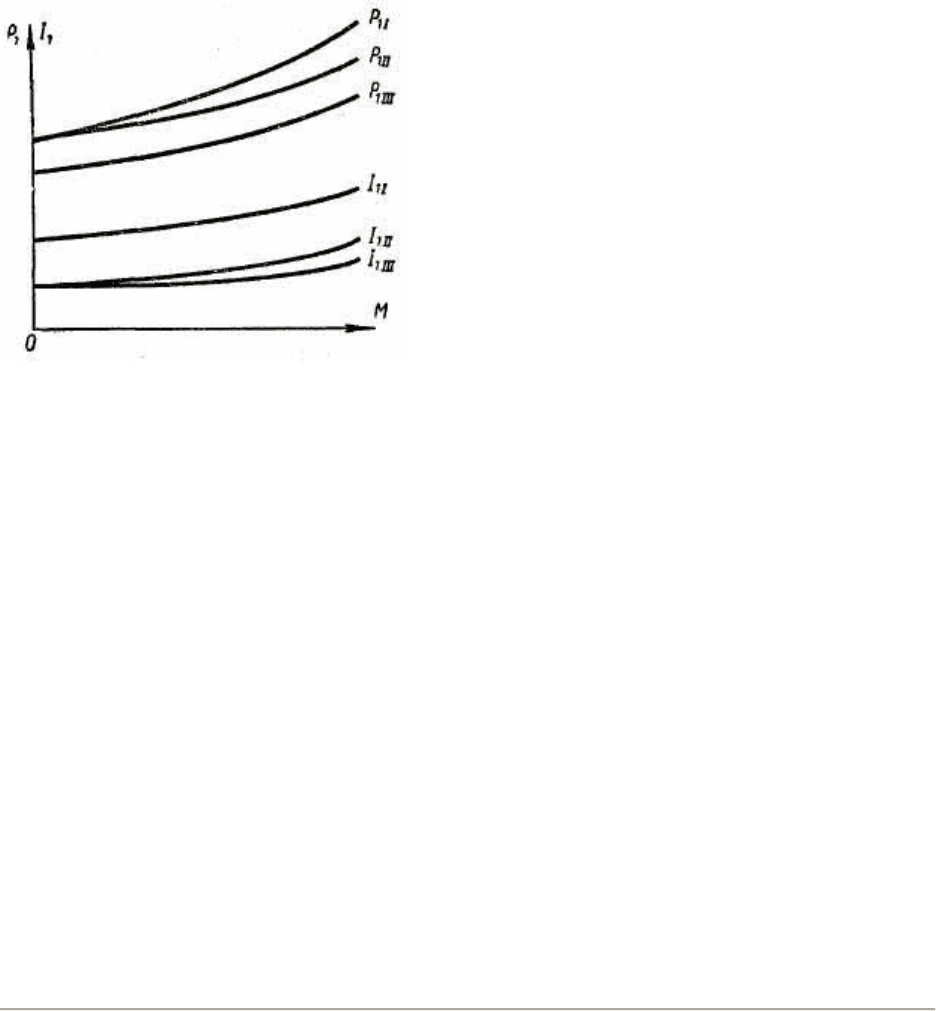
Рис. 4.59. Зависимость мощности и тока статора асинхронного двигателя от момента при различных схемах
питания
в большей степени, чем при трехфазном питании. В результате этого увеличиваются
паразитные моменты.
Отсутствие малогабаритных конденсаторов замедляет развитие конденсаторных
двигателей. В настоящее время габариты конденсаторов иногда в несколько раз
превышают габариты самих двигателей, что создает определенное неудобство.
Двигатель с короткозамкнутыми витками на полюсах. Двигатели с экранирующими
короткозамкнутыми витками на полюсах отличаются простотой конс
трукции. Они имеют
короткозамкнутый ротор. Статорная обмотка выполняется в виде катушек 1 (рис. 4.62),
которые надеваются на неподвижные полюсы. На каждом полюсе имеется паз, который
делит полюсный наконечник на две неравные части. Меньшая часть полюсного
наконечника экранируется короткозамкнутым витком 2. Магнитный поток в
экранированной области полюса отстает по фазе от основного, в результате чего создается
вращающееся эллиптическое магнитное поле.
Так как обмотка статора выполняется не распределенной, а сосредоточенной, то в кривой
м. д, с. появляются высшие простран-
ственные гармоники, из которых наибольшей является третья. В результате действия
третьей гармоники механическая характеристика двигателя имеет провал при скорости
вращения, близкой к 1/3 синхронной.
Основными потерями двигателя являются потери в корот-козамкнутом витке, которые не
зависят от нагрузки. Двигатели с экранированными полюсами имеют пониженные к. п. д.,
максимальный и пусковой моменты. Для ул
учшения характеристик двигателей между
полюсами размещают магнитные шунты 3 (рис. 4.62), которые имеют вид стальных
пластинок. Под действием шунтов увеличивается экранированный магнитный поток
полюса, в результате чего вращающееся поле в большей степени приближается к
круговому. Для этой же цели в некоторых случаях зазор под участком экранированной
части полюса делают меньшим, чем под неэкра-нированной.
276
Двигатели с экранированным полюсом могут долго находиться под напряжением при
заторможенном роторе и не боятся частых пусков и внезапных остановок. Обычно
двигатели выполняются мощностью 0,5—30 вт и применяются в тех случаях, когда
пусковой момент не превышает 0,2÷0,6 номинального.
Паразитные моменты. В трехфазной обмотке третьи пространственные гармоники
фазных м. д. с. компенсируют друг друга и не оказывают существенного влияния на
работу машины. В двигателях, имеющих на статоре однофазную и двухфазную обмотку,
третьи гармоники м. д. с. не компенсируются и, если обмоточный коэффициент этой
гармоники не близок нулю, их результирующая м. д. с. достигает значительной величины.
Магнитодвижущая сила третьей гармоники однофазной обмотки является пульсирующей,
а двухфазной — чаще всего вращающейся эллиптической. В обоих случаях м. д. с. может
быть разложена на волны, прямо и обратно вращающиеся со скоростью, равной 1/3
синхронной.
Рис. 4.60. Зависимость к. п. д. и коэффициента мощности асинхронного двигателя от момента при
различных схемах питания
Рис. 4.61. Схема соединения трехфазного двигателя при включении его в однофазную сеть: а — обмотка
статора, соединена в звезду; б — обмотка статора соединенная в треугольник
Вращающиеся поля третьих гармоник наводят в роторе токи, которые в результате
взаимодействия с этими же полями создают асинхронные моменты. Обратно
вращающееся поле неподвижно относительно ротора при его вращении встречно полю
основной гармоники со скоростью, равной
1
/
3
синхронной, что соответствует скольжению
s = 1
1
/
3
по отношению к синхронному полю. При скольжении s < 1
1
/
3
асинхронный момент
М'
3
, создаваемый об-
277
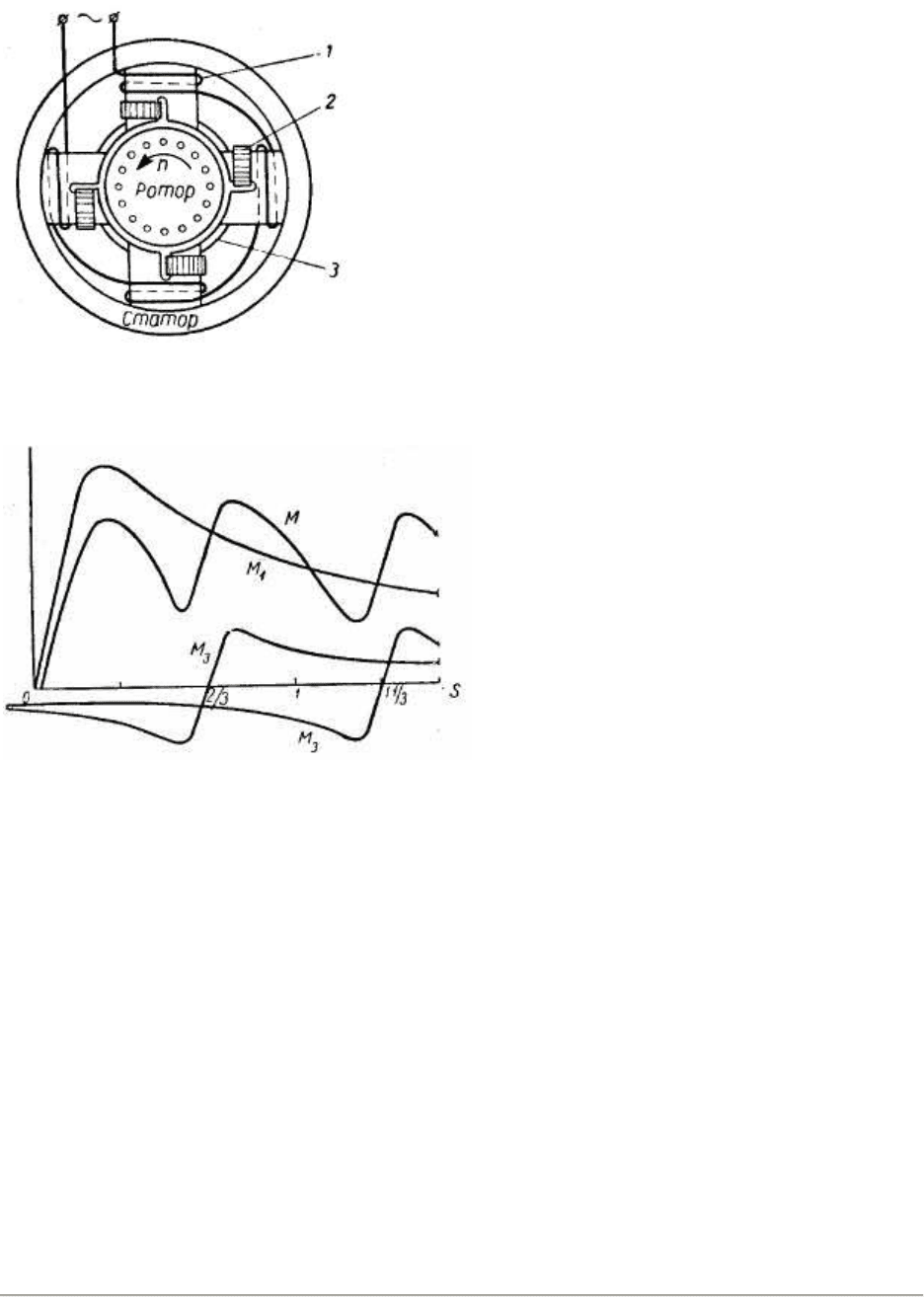
Рис. 4.62. Схема двигателя с короткозамкнутыми витками на полюсах: 1 — катушка; 2 — короткозамкнутый
виток; 3 — магнитные шунты
Рис. 4.63. Влияние третьей пространственной гармоники м. д. с. на кривую момента двигателя
ратно вращающимся полем третьей гармоники, является тормозным (рис. 4.63). При
вращении ротора в прямом направлении со скоростью, равной
1
/
3
синхронной, что
соответствует скольжению s =
2
/
3
, поле прямо вращающейся третьей гармоники является
неподвижным относительно ротора, поэтому создаваемый им асинхронный момент М
3
в
этом случае равен нулю. В диапазоне скольжений 1 ≥ s >
2
/
3
поле прямо вращающейся
третьей гармоники вращается быстрее ротора и асихронный момент М
3
является
двигательным. При s <
2
/
3
и при s > 1 асинхронный момент М
3
является тормозным. В
первом случае асинхронная машина работает в генераторном режиме по отношению к
прямо вращающемуся полю третьей гармоники, во втором случае — в режиме
электромагнитного тормоза.
В результате совместного действия электромагнитного вращающего момента,
создаваемого полем основной гармоники (M
1
), обратно вращающимся полем третьей
гармоники (М'
3
) и ее прямо вращающимся полем (М
3
) создается электромагнитный
момент М, который имеет провалы при скольжении, s = 1
1
/
3
и s =
2
/
3
(рис. 4.63). В рабочем диапазоне скольжений s от 1 до 0 асинхронный момент M'
3
,
создаваемый обратно вращающимся полем третьей гармоники, уменьшает
электромагнитный момент M двигателя.
278
Провал момента M, создаваемый прямо вращающимся полем третьей гармоники, при s =
2
/
3
осложняет асинхронный пуск двигателя и в случае значительного момента
сопротивления вращению ротор двигателя может застревать и устойчиво вращаться при
скорости, близкой к 1/3 синхронной, что соответствует скольжению s = 2/3. Известно, что
при двухфазной обмотке статора в случае кругового поля первой гармоники прямое поле
третьей гармоники отсутствует. В результате этого исчезает провал в кривой момента при
скольжении, близком к 2/3. Обратное поле третьей гармоники уменьшает момент
двигателя и увеличивает реактивную составляющую тока статора. Это происходит
потому, что машина находится в тормозном режиме относительно обратно вращающегося
поля третьей гармоники, в связи с чем уменьшаются коэффициент мощности и к. п. д.
двигателя.
Для уменьшения полей третьей гармоники двигатели, имеющие на статоре однофазную
или двухфазную обмотку, должны иметь укорочение шага обмотки, близкое к
1
/
3
. Другие
высшие пространственные гармоники, например пятая и седьмая, также создают свои
паразитные моменты, поэтому желательно обмотку статора делать синусной.
ВОПРОСЫ
1. Почему двигатели с однофазной обмоткой на статоре не имеют начального пускового момента? Каким
образом может быть создан вращающийся поток двигателя при наличии однофазной сети? Какую схему
соединения обмоток статора имеют конденсаторные двигатели? Каковы преимущества конденсаторных
двигателей по сравнению с двигателями, имеющими на статоре однофазную обмотку? Какое действие
оказывает короткозамкнутый виток, экранирующий ч
асть полюса?
2. Чем вызван провал в кривой момента однофазных двигателей при скорости вращения, близкой к 1/3
синхронной? Каким образом могут быть уничтожены паразитные моменты?
279

§ 4.8. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
Общие сведения. Среди исполнительных двигателей, применяемых в системах
автоматики, наибольшее распространение получили асинхронные микродвигатели.
Основным их достоинством является простота конструкции и надежность в работе.
Основным требованием, предъявляемым к исполнительным двигателям, является
линейная зависимость между величиной сигнала
и скоростью вращения. Для предупреждения самохода активное-сопротивление
короткозамкнутого ротора выбирается настолько большим, чтобы была исключена
возможность вращения двигателя за счет однофазного пульсирующего поля. Иначе после
исчезновения сигнала на обмотке управления двигатель продолжал бы вращаться как
однофазный.
Благодаря повышенному значению активного сопротивления обмотки ротора критическое
скольжение s
k
больше единицы. В этом случае после снятия сигнала с обмотки
управления на ротор действует тормозной момент (см. рис. 4.53, в), вследствие чего время
остановки ротора оказывается меньшим, чем при одновременном снятии напряжения с
обмоток возбуждения и управления. Обычно у исполнительных двигателей s
k
= 3÷4. В
результате этого создаются благоприятные условия для регулирования скорости
вращения, и двигатели устойчиво работают во всем диапазоне скольжений от 0 до 1.
В качестве исполнительного двигателя в некоторых случаях применяется двигатель с
обычным короткозамк-нутым ротором типа беличьей клетки, имеющим повышенное
сопротивление обмотки ротора. Короткозамкнутая клетка таких двигателей изготовляется
из латуни или специальных сплавов. Вследствие повышенного активного сопротивления
ротора значительно увеличиваются электрические потери и уменьшается полезная
механическая мощность двигателя, поэтому номинальная мощность асинхронных
исполнительных двигателей в два-три раза меньше, чем обычных короткозамкнутых
двигателей, имеющих те же габариты.
Недостатком исполнительных двигателей с ротором типа беличьей клетки является
сравнительно большая электромеханическая постоянная времени.
Двигатели с полым немагнитным ротором. В схемах автоматики наибольшее
распространение получили асинхронные двигатели с полым немагнитным ротором,
который обычно выполняется из тонкостенного (толщиной 0,2—1,0 мм) алюминиевого
стакана 2 (рис. 4.64), прикрепляемого с одной стороны к валу 5. Вследствие легкости
тонкого алюминиевого ротора момент инерции двигателя мал, что обеспечивает его
быстродействие. В контурах стакана ро-
280