Kristiansen Svein. Maritime Transportation: Safety Management and Risk Analysis
Подождите немного. Документ загружается.


of the visibility effect model was therefore based on data for the whole study period. The
Fog Collision Risk Index (FCRI) gives the number of collisions per encounter as a function
of the relative incidence of the visibility ranges:
FCRI ¼ðP
1
VI
1
þ P
2
VI
2
þ P
3
VI
3
Þ
where:
P
k
¼ Probability of collision per million encounters
VI
k
¼ Fraction of time that the visibility is in the range k
k ¼ Visibility range: 1, Clear; 2, Fog; 3, Dense
The estimated parameters of the model are shown in Table 6.13. The data show the
dramatic effect of reduced visibility on the collision risk. Although the relative frequency
of visibility ‘Thick/dense’ is less than 1%, the probability increases by a factor of 1800.
The resulting value for Dover Strait was:
FCRI ¼ 25:8 10
6
ðcollisions=encounter within 0:5nmÞ
The contribution of ‘Thick/dense’ on this figure is 68% (0.0097 1800 ¼17.5),
e.g. without the presence of this visibility condition the probability had been in the
order of FCRI ¼8 or one-third of the actual value. It can therefore be concluded that
though marginal visibility is mostly obs erved, its effect on navigational safety is seldom
dramatic.
The fact that there are limited studies of the effect of visibility for other fairways makes
it tempting to adapt the model in our general models for collision frequency estimation.
What is essential from the model described is the relative effect of visibility ranges on
the collision failure rate. By dividing the P
k
values by 6, we can visualize the relative
importance:
P
1
¼ 1; P
1
¼ 10; P
1
¼ 300
We can then rewrite the model above as follows for the collision failure frequency:
¼ kð1 VI
1
þ 10 VI
2
þ 300 VI
3
Þ
For head-on collisions in Dover the value has earlier been found to be 2.7 10
5
which,
inserted in the equation above, and assuming the same visibility frequencies gives :
k ¼ 0:63 10
5
Ta b l e 6 . 1 3 . FCRI for the Dover Strait
Visibility (k) Clear Mist/fog Thick/dense
Relative visibility incidence (VI
k
) 0.9457 0.0446 0.0097
Collision probability (P
k
)610
6
60 10
6
1800 10
6
166 CHAPTER 6 TRAFFIC-BASED MODELS
The model head-on collision in Dover can then be written:
¼ 0:63 10
5
ð1 VI
1
þ 10 VI
2
þ 300 VI
3
Þðfailures=nmÞ
The physical meaning of the constant k is the failure frequency corresponding to 100%
clear visibility.
ATraffi c Sepa ra ti on Case
Problem
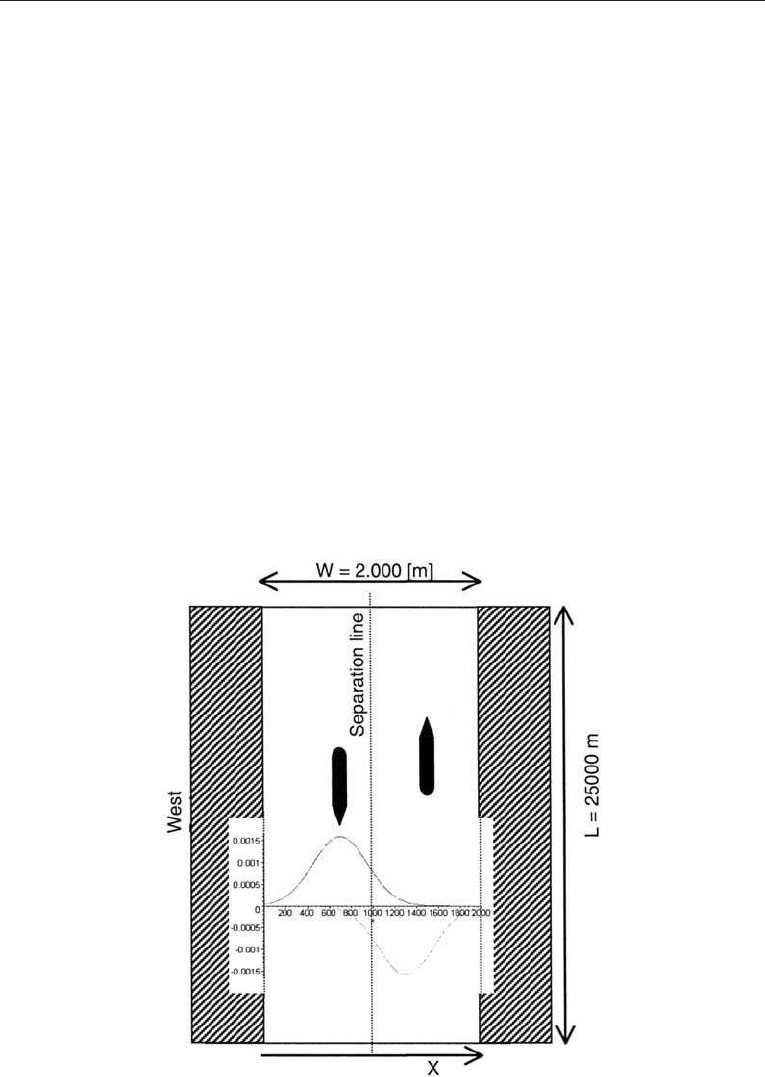
A busy harbour is entered through a narrow channel. The channel, however, represents a
significant collision risk. It is suggested to implement a traffic separation scheme (TSS) in
a channel. Assess the effect of the TSS.
Facts
The channel is 2 km wide. The traffic distribution in each direction after traffic separation
is assumed to follow a normal distribution with the peak traffic (mean) 700 m from
the west side bank and variance ¼62,500 in the south direction and with a peak at
1300 m in the opposite direction and the same variance. The traffic in each direction is
14.4 ships/hour. The mean ship beam is 15 m and mean speed 7 m/sec.
6.9 VISIBILIT Y 167
Assum ptions
There is no significant crossing traffic. The collision navigation failure rate is equal to
c
¼2.5 10
4
failures/hour.
Experience from other fairways where traffic separation has been implemented shows
that some ships will violate the separation scheme and therefore still represent a risk of
head-on collision. It is assumed that violators (rogues) constitute about 10% of the traffic.
Ana lysis of p r esen t sit ua t io n
At present the traffic in each direction is uniformly distributed over the whole channel
width. The traffic density is given by:
s
¼
N
m
v W
¼
14:4
3600
1
7 2000
¼ 0:286 10
6
ðships=m
2
Þ
The expected number of collisions given loss of control is:
N
i
¼ 4 B D
s
¼ 4 15 25,000 0:286 10
6
¼ 0:43 ð1=passageÞ
The necessary time for a ship to pass the fairway is:
T ¼ D=v ¼ 25,000=7 ¼ 3571 sec
The probability of losing navigational control within the fairway is:
P
c
¼ 2:5 10
4
ð3571=3600Þ¼2:48 10
4
ðfailures=passageÞ
The probability of collisions is:
P
a
¼ P
i
P
c
¼ 0:43 2:48 10
4
¼ 1:06 10
4
ðcollisions=passageÞ
As we have the same traffic flow in each direction, the annual number of collisions is
estimated to be:
N
a
¼ P
a
N
m
¼ 1:06 10
4
14:4 24 365 ¼ 13:4 ðcollisions per yearÞ
Analysis of the effect of TSS
Presently the traffic has a uniform distribut ion across the width of the fairway. This
means that a ship in the course of a period T meets N
m
T ships or N
m
T/W ships per unit
of the channel width. If traffic separation is introduced, the traffic will have another
168 CHAPTER 6 TRAFFIC-BASED MODELS
distribution function across the channel. The non-dimensional expressions for the traffic
flow are:
f
south
ðxÞ¼
1
250
ffiffiffiffiffiffiffiffiffi
2
p
e
1=2 x700=250ðÞ
2
f
north
ðxÞ¼
1
250
ffiffiffiffiffiffiffiffiffi
2
p
e
1=2 x1300=250ðÞ
2
Owing to symmetry it is only necessary to analyse one direction. Let us look at the
violating ships going in the south direction. These ships occupy roughly the section from
700 m to 1000 m. By integrating the function above for this range we get:
F
1
¼
Z
1000
700
f
south
ðxÞdx ¼ 0:236
The violating flow is:
N
1
¼ N
m
F
1
¼ 14:4 0:236=3600 ¼ 9:4 10
4
ships=sec
The traffic density of the violating flow is:
¼ 9:4 10
4
=ð7 300Þ¼4:5 10
7
ships=m
2
The probability of encounter is:
P
i
¼ 4B D
s
¼ 4 15 25,000 4:5 10
7
¼ 0:27 ð1=passageÞ
The non-violating traffic in the critical section can be estimated as above:
F
2
¼
Z
1000
700
f
north
ðxÞdx ¼ 0:264
The exposed traffic flow is:
N
2
¼ 14:4 0:264 8760 ¼ 33,302 ships=year
The expected number of head-on collisions due to violating vessels is:
N
a
¼ P
i
P
c
N
2
¼ 0:27 2:48 10
4
33,302 ¼ 5:23 collisions=year
6.9 VISIBILIT Y 169

Owing to symmetry the actual number of collisions will be twice as high, namely
4.5 collisions/year.
This shows that the effect of introducing TSS is quite dramatic. The frequency of
head-on collisions is reduced by a factor of 3:
13:4=4:5 ¼ 3
170 CHAPTER 6 TRAFFIC-BASED MODELS

REFERENCES
Ewing, L. E., 1975, Reliability Analysis of Vessel Steering System . Technical Report TR 958-198-111-1,
General Electric Company, Arlington, VA. (NTIS AD-A015 821).
Fujii, Y., 1982, Recent trends in traffic accidents in Japanese waters. Journal of Navigation, Vol.
35(1), 90–99.
Kristiansen, S. and Karlsen, J. E., 1980, Analysis of Causal Factors and Situation Dependent Factors.
Report No. 80-1144, Det norske Veritas, Høvik, Norway.
Kristiansen, S., 1980, Risk of Sailing the Norwegian Coast – Tank Ship Accidents [In Norwegian:
Risiko ved beseiling av norskekysten – tankskipsulykker]. Report No. 80-1142, Det norske Veritas,
Høvik, Norway.
Lewison, G. R. G., 1978, The risk of encounter leading to a collision. Journal of Navigation,
Vol. 31(3), 384–407.
171

7
DAMAGE ESTIMA TION
If there is a possibility of several things going wrong, the one that will cause
the most damage will be the one to go wrong
(‘‘Murphy’s Third Corollary’’)
7.1 INT RODUC TION
In the previous chapter methodologies for estimating the probability of having an impact
accident were described for various types of accidents. The possible resulting damage of
the impact accident is, however, still not identified. This chapter describes qualitatively the
likely accident characteristics and also the techniques for quantifying the likely damage
caused by the accidents.
There are a number of factors that affect the damage extent in a collision:
1. Structural characteristics of vessels involved.
2. The mass of the vessels involved.
3. Speed and relative course.
4. Location of damage.
5. Deformation mechanisms.
In the same manner, damage as a result of grounding will be governed by:
1. Speed and mass of the vessel.
2. Sea floor characteristics.
3. Frictional forces of hull against sea floor.
4. Initiation of local damage (denting, rupture, etc.).
5. Bottom–vessel interaction (lifting of vessel).
6. Deformation mechanisms.
7. 2 SURV E Y OF DA M AG E DATA
7. 2 .1 C e n t r e o f D a m a g e
The Ship Hydrodynamics Laboratory in Otaniemi did their first studi es of accident
damage in the 1970s. Kostilainen (1971) made a survey of tanker accidents in the Baltic
173
area for the period 1960–69. Subsequently a larger study covering tankers, general and
bulk carriers was unde rtaken by Kostilainen and Hyva
¨
rinen (1976).
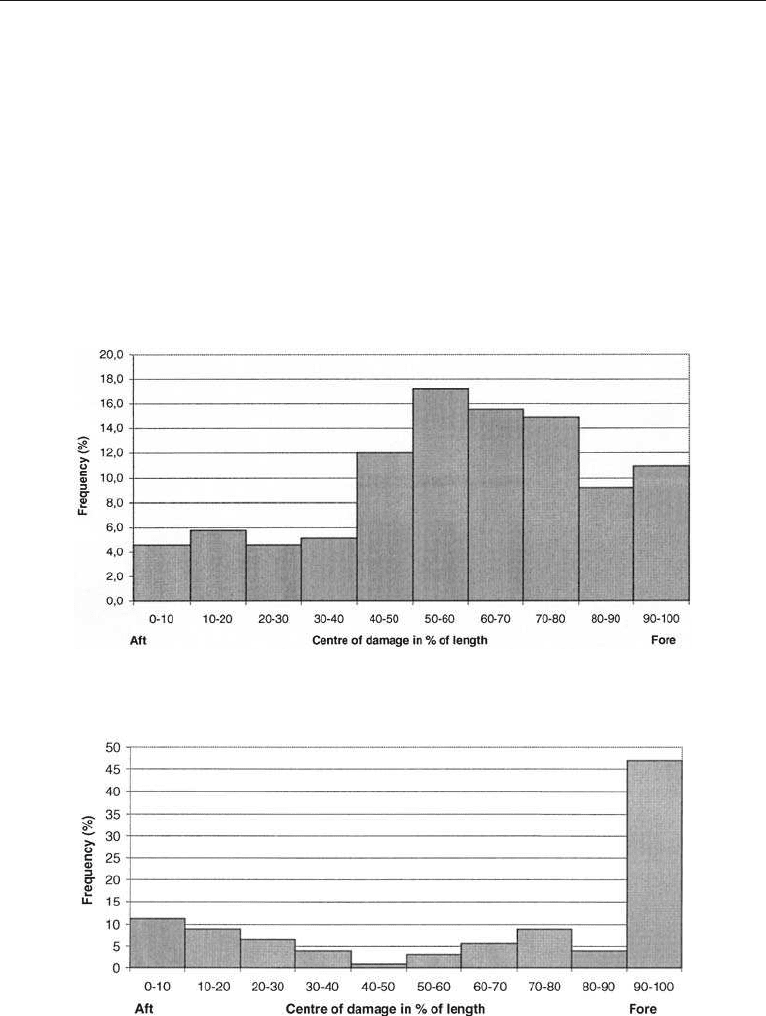
In Figure 7.1 the distribution of the longitudinal centre of the damage for grounding
accidents is shown on the basis of the two studies mentioned previously. It is not surprising
that the foreship is most exposed, and it can be seen that 80% of the damage is located
from the bow and 60% of the length aft. In the same manner the damage centre is shown
for collisions in Figure 7.2. It is important to keep in mind that collision involves at least
two vessels and that the striking vessel will be subject to bow damage. This explains the
fact that almost 50% of damage cases are located in the bow area (90–100% of L). If one
excludes the striking ship cases, it can be stated that the struck ship is most exposed at
both ends and less in the midship area.
Figure 7.1. Distribution of longitudinal centre of grounding damage, 174 accidents in the Baltic area,
1960 ^ 69. (Sources: K ostilainen, 1971; K ostilainen and Hyva
«
rinen ,1976.)
Figur e 7.2. Distri but ion of long it ud i nal cent re of coll is ion damage,125 accide nts in the Balt ic area. (Sour ce:
Kostilainen,1971; Kostilainen and Hyva
«
rinen ,1976.)
174 CHAPTER 7 DAMA GE ESTIMATION
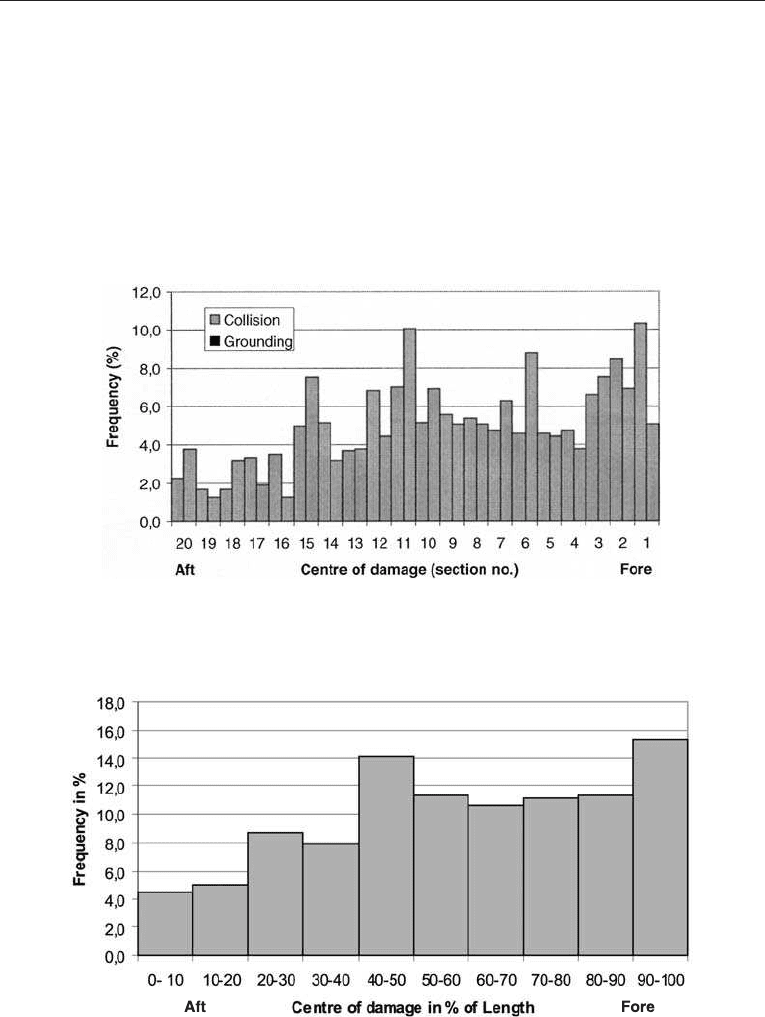
Alexandrov (1970) did a similar study in connection with an analysis of the
effectiveness of life-saving systems. It was based on a greater database that had been
prepared by an IMO Working Group and consisted of 485 collisions and 159 grounding
reports (IMO, 1993). The striking vessels were also excluded in this study. The distribution
is shown in Figure 7.3. It can be concluded that 74% of the vessels were hit between the
bow and 60% of the length aft. This compares well with the previously cited studies.
Finally, the mean values for all accidents were taken together for 10% sections in order
to cancel out some of the randomness in the material. The result is shown in Figure 7.4.
Seen in perspective, these studies give a mixed picture of the probable damage location.
Figure 7.3. Distribution of longitudinal centre of collision and grounding damage. Section length given in
5% of L
pp
.(Source:Alexandrov,1970.)
Figure 7.4. Distribution of longitudinal centre of impact damage. Section length given in 10% of L
pp
.
(Source: adapted fr om data of Alexandro v, 1970.)
7. 2 S U RV E Y O F D A M A G E D ATA 175