Козин В.З. Опробование, контроль и автоматизация обогатительных процессов
Подождите немного. Документ загружается.

Объект
О г- 17 I,, Объект
rF^rfVr^e^Jr
{7ir7]-HgH^pir£]—^>J?
•tytfi
W
B"Pftolf>)\ T
МвЗель "объекта
И. I ~ }У<
-ф-щ{-*<&р)]
^*\ехр(-
*оБР)
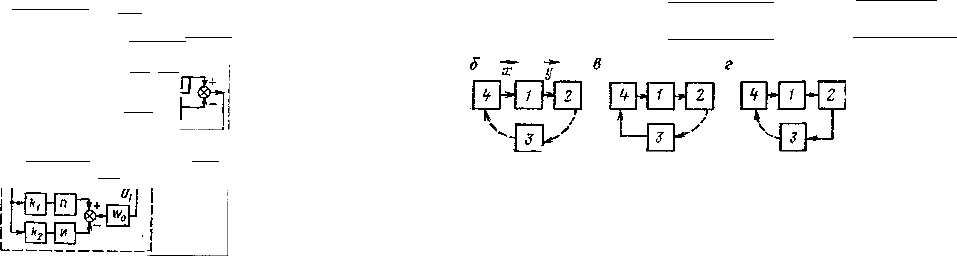
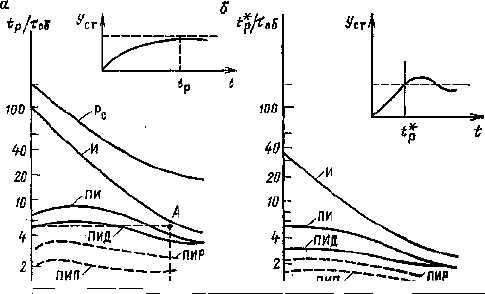
Рис. 8.4. Структурные схемы современных алгоритмов
1 и
т
7^1-^ 1 у
Ш-регумтар *0—(*• w
0
i *
настройке в пределах 0<&<1. Удается получить значительно
более высокий запас устойчивости АСР, чем при ПИ-законе
регулирования, и обеспечить высокую точность стабилизации
при изменениях динамических характеристик объекта. Таким
образом, учет предыстории функционирования АСР (прошлых
значений выходной величины объекта) на интервале времени,
примерно равном времени запаздывания объекта, как пока-
зали промышленные испытания алгоритма, значительно повы-
шает качество АСР (ПИР-алгоритм представляет собой ап-
проксимацию 1-го порядка, квазиоптимального в смысле прин-
ципа максимума алгоритма управления, реализуемого для
объектов 2-го порядка с запаздыванием).
В пропорционально-интегральном по предыстории алго-
ритме (ПИП), для наиболее полного использования предвари-
тельно полученной об объекте информации передаточная функ-
ция объекта введена в выражение для передаточной функции
регулятора, т. е. учитывается модель объекта
^Р (Р) = h [1-^ов (рУКоб] + Vh/(T
n
p)] [1 -k
2
W
o6
{р)1Коб\\ (8.2).
W
p
(p) = k
p
[1 + (Тир)"
1
] [(1 -kW
o6
/Ko6)b
где W
p
и №
0
б — передаточные функции соответственно регуля-
тора и объекта; k
Pt
Г
и
, k
u
k
2
, k — настроечные параметры ре-
гулятора (Коб — статический коэффициент передачи объекта).
Анализ алгоритма (8.2) и соответствующей ему блок-схемы
(рис. 8.4, в) показывает, что управляющий сигнал \i регуля-
тора формируется в виде суммы сигналов /7
П
и
и
U\- Введение
добавок, ослабляющих пропорциональную (k\) и интегральную
(k
2
) части классического ПИ-закона, предотвращает чрезмер-
ный рост управляющего воздействия, характерный для других
алгоритмов в АСР с запаздыванием, и позволяет существенно'
повысить точность стабилизации.
200
Объект
ч
\x(t)\x(t-AtT'
\y(t)\y(t-AtJ\
x(t-mAt) |
..\y(t-ndtj |
1 Иг
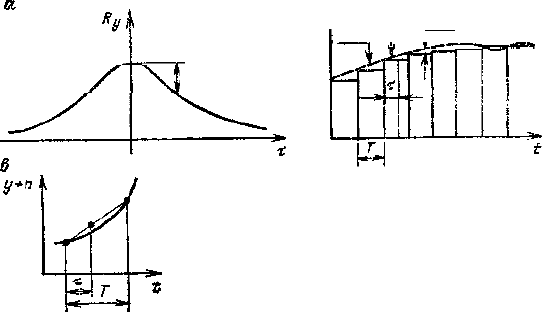
Рис. 8.5. К реализации алгоритмов управления с помощью УВМ:
а — связь с объектом; б — управление посредством человека; о — программируемое че-
ловеком управление без обратной связи от объекта; г — режим «советчик оператору:»;
<д — замкнутое управление без человека; /—объект; 2 — измерительная система; 3 —
УВМ; 4 — исполнительный механизм или АСР
Перейдем к реализации алгоритмов управления с помощью
ЭВМ.
Рассмотренные алгоритмы управления реализуются с по-
мощью УВМ путем следующей организации ее работы м части
получения информации о выходной величине объекта у и вы-
числения управляющих команд на входе объекта х. Для управ-
ления объектом с одним входом х и одним выходом у в УВМ
выделяется одномерный массив ячеек памяти, например N
= 20 ячеек; в этот массив записываем текущее y(t) и предыд;
щие y(t—Т), ..., y(t—NT) значения измеряемой выходной \и
личины объекта (рис. 8.5, а). Периодически с интервалом ир«
мени Т (например, Т = 2 мин) по сигналу датчика времени
(таймера) и датчика выходной величины y(t) числа в ячейках
-массива автоматически обновляются следующим образом.
Наиболее запаздывающий сигнал y(t—NT) стирается из
последней ячейки массива, и в нее перемещается число у\Т—
— (N—1)Г] из предпоследней ячейки, и так далее — до первой
ячейки, содержимое которой переносится во иторую ячейку;
в первую же ячейку записывается новое текущее значение y(t)
БЫХОДНОЙ величины объекта. После очередного такого обнов-
ления в массиве содержится текущее значение //(/) и ряд за-
паздывающих значений — предыстория процесса.
Для некоторых алгоритмов управления может потребо-
ваться еще аналогичный массив входной величины объекта
x(t), x(t—Г), . . ., x(t—МТ), также обновляемый по сигналам
датчика времени и величины x(t).
Работа УВМ в режиме управления включает арифметиче-
ские операции с упомянутыми массивами чисел y(N) и х(М)
для выработки управляющего сигнала х(1) на входе объекта
для каждого наступающего (после обновления массивов) пе-
риода времени Т. Для этого в следующее мгновение после
обновления массивов арифметическое устройство УВМ делает
201
над числами массивов y(t), y(t—Т), ..., те арифметические опе-
рации, которые предписывает математическая формула алго-
ритма x(t) =f[y(t), y(t—Т), ...], причем производные заме-
няют конечными разностями dy/dt^[y(t)—y(t—Т)]/Т, интег-
рирование— суммированием J.. .d/~2.. At. Полученное число
x(t) передается в качестве команды для изменения поло-
жения регулирующего органа на входе объекта (и, может
быть, в первую ячейку массива входа х(М), если это нужно и
если нет соответствующего датчика входа). Этим путем УВМ
реализует любой алгоритм, запрограммированный для нее че-
ловеком. Основной творческой задачей становится нахождение
самих алгоритмов управления. Эта задача особенно актуально
при разработке АСУТП.
Для многих из рассмотренных стабилизирующих алгорит-
мов обобщающей является следующая формула (линейных ал-
горитмов) :
x(t) = x
0
+ a
(
fi(t)+a
1
b{t-T)+ . . . +a
n
A{t—NT) +
+ Ь
1Х
у-Т) + Ь
2
у-2Т)+ • • • +b
m
x{t~MT), (8.3).
где XQ—начальное (среднее) положение регулирующего ор-
гана; at, bj — настроечные коэффициенты алгоритма; А = у—
—Уо — отклонение стабилизируемой величины от задания.
Классические стабилизирующие алгоритмы получают из
выражения (8.3) как частные случаи. Так, ПИ-закон получа-
ется при условии х
0
фО и а
0
= 0, а остальные а
г
, Ь,- равны нулю,
т. е. x(t)—Xo = a
0
A(t) — изменение положения регулирующего-
органа пропорционально сигналу отклонения.
И-закон получается из выражения (8.3) в виде x(t)—х
0
=
= a
0
(TT
l
r
1
)S(t), где Т
и
— время интегрирования; k
p
= a
0
X
ХТТ
И
-
1
— статический коэффициент передачи; S (/)—содер-
жимое ячейки интегратора (накопителя), обновляемое по за-
кону 5 (/) =5 (/—T)+A(t) с интервалом Т.
ПИД-алгоритм можно реализовать либо с упомянутым ин-
тегратором без массива х(М):
x(t)-x
0
= k
p
A(t) + k
p
TT-
l
S(t) + k
p
TJ-
1
[A(t)-A(t--T)],
либо с массивом х(М) как частный случай формулы (8.3)
x(l)-x
0
= k
p
(\ + TT-
l
+ TJ-
1
)A(t)+k
p
(l-2TJ-
1
)A(t-T) +
+ £р (ТдТ-
1
) A (t — 2T) + x(t—Т). (8.4)
В формуле (8.4) множители, стоящие перед А и х, суть ко-
эффициенты at и bj в формуле (8.3), в ней роль интегратора
S(t) выполняет массив x(M)=x(t—Т), который здесь вырож-
дается в одну ячейку.
202
Алгоритм вводится в УВМ с помощью программы, состав-
ленной на одном из программирующих языков (ФОРТРАН
и др.).
Для ПИР-алгоритма с передаточной функцией (8.1) программа на языке
ФОРТРАН, успешно испытанная с УВМ для управления длинными вращаю-
щимися печами т
О
б>20 мин, имеет вид (сопровождается пояснениями):
DIMENSION DEL (20)
READ 1 ХО, DT, TI, К, SI, S2, KD, N1, DEL— ввод констант алгоритма и
сигнала отклонения DEL;
5DO 4 J = 1,19; DEL (21 — J) = DEL (20 — J) — сдвижсмше членов массива
предыстории отклонения A (t);
4CONTINUE;
DEL (1) равно новому значению сигнала отклонения A (t), вводится от датчика
У (0 — й с периодом Т, например 1 мин;
51 = SI + DEL (1) — интегрирование отклонения A (t)\
52 = S2 -j- DEL (20) — интегрирование запаздывающего отклонения A (t — т);
X = ХО+ KP*DEL(1)+ (КР * DT/TI)(S1 — KS2) + KD*(DLL (l) -
—DEL (N1)) — математическая формула алгоритма, вырабатывающая управляю-
щую команду (я = х (t) на входе объекта в момент t, с периодом А/;
•PRINT2.X
1 FORMAT ( )
2FORMAT ( ) — вывод на печать, если требуется контроль со стороны че-
ловека;
GOT05 — возврат к началу нового периода.
Дадим пояснения. Программа реализует управление по формуле (8.1),
которая в разностно-временной области имеет вид
h
х (t) = х
0
+ £
р
А (t) + (k&tT-
1
) £ [A (t) -ЙД (t-x)} -|-
о
+ А
д
[Д(0--Д(*-т
1
)].
Принятые обозначения: DEL (20)—массив отклонений Д = «/—tja стаби-
лизируемой величины от задания в текущий момент DEL (1) ив моменты
запаздывающие x=At, x=2At, ... DEL (2), DEL (3) и т. д. (число ячеек
памяти массива 20 можно изменить при настройке программы алгоритма на
конкретный объект); ХО — начальное положение регулирующего органа на
входе ИМ; X — текущее положение регулирующего органа (изменяется по
команде датчика времени УВМ с периодом f=const); КР /ч>; DT Т; Т1 =
= Г
И
— константы; S1 и S2 — интегралы от A(t) и А(/—т), причем т=20А^;
Ti=(Nl)A£ — запаздывание дифференцирующей части алгоритма. УВМ выра-
батывает управляющую команду для изменения входа объекта с периодом Т.
При управлении многомерными объектами с числом входов
Ш, Т. е. (Х\, Х2, . . ., X
m
) И ЧИСЛОМ ВЫХОДОВ П, Т. V. (//|, у2, • • ., Уп)
в оперативной памяти УВМ организуют m одномерных масси-
-> ->-
вов входом х(М) и п одномерных массивов HI.Iходов y(N), ана-
логичных каждый рассмотренным массивам х(М) и y(N). Эти
одномерные массивы могут быть разной длины (т. е. содержать
разное число ячеек памяти). Кроме того, обновление информа-
ции в каждом массиве может происходить со своей собствен-
ной частотой (кратной частоте сигнала датчика времени).
203

В этих массивах хранятся текущие и запаздывающие значения
всех измеряемых входных и выходных сигналов объекта.
Реализуемые алгоритмы управления для многомерных объ-
ектов имеют в общем случае нелинейный вид
Xi(t) = F
1
[y
i
(N
t
);
XJWJ)];
x
m
(t) = F
rn
[y
i
(N
i
); Xj(Mj)],
где i' = 0, 1,2,..., n; j= 1, ..., m.
В частном случае стабилизирующего управления нелиней-
ные функции F\, .. ., F
m
могут быть заменены на линейные
-> ->
комбинации всех чисел, хранимых в массивах, y(N) и х(М),
как в формуле (8.1). Заметим, что УВМ может выполнять при
автоматизации различные функции — от простейшего управле-
—»- ->-
ния посредством связи и с входами х и с выходами у объекта
только через человека-оператора (штриховые линии), до пол-
ностью автоматического управления (рис. 8.5, б—д).
На смену локальным традиционным регуляторам (стабили-
зирующим, экстремальным и др.) приходят новые алгоритмы
и УВМ. Здесь важны две сферы знаний: управляющие алго-
ритмы, учитывающие особенности управления объектом; уни-
версальная материальная часть, включающая элементы цифро-
вой и аналоговой управляющей техники, процессор УВМ, уст-
ройство связи с объектом (УСО) и др.
В заключение рассмотрим типовую структурную схему
замкнутого управления любыми объектами с помощью УВМ.
На вход УВМ (рис. 8.6) от датчиков (Д) поступает измери-
тельная информация о текущих значениях выходных величин
Ух, ..., у
п
объектов управления. После преобразования сигна-
лов из непрерывных в дискретные (Н/Д, аналог-код) УВМ об-
рабатывает эти сигналы у{ в соответствии с выбранным зако-
ном (алгоритмом) управления для получения командной ин-
формации х{, которая после обратного преобразования (Д/Н)
подается через исполнительные механизмы (ИМ) на входы
объектов хи • • -, х
т
.
Преобразователи непрерывных величин в дискретные (циф-
ровые) и наоборот делают многоканальными с использованием
коммутатора (КОМ), который последовательно сбегает дат-
чики (или ИМ). Распространен принцип синхронной связи
УВМ с объектами, при котором процесс управления разбива-
ется на периоды (циклы) равной продолжительности тактиру-
ющими импульсами от электронных часов (ЭЧ) (таймера).
В начале очередного цикла, с приходом тактирующего им-
пульса на устройство прерывания (УП) происходит обегающий
опрос датчиков (с преобразованием сигналов в цифровую
204
Рис. 8.6. Структурная схема управления
с помощью УВМ
форму) и ввод цифровых сигналов в ОЗУ. По отношению к от-
дельному датчику его выходной непрерывный сигнал кванту-
ется по уровню и по времени.
После ввода измерительной информации у{ г, ЗУ УВМ вы-
числяет управляющие команды х{ и выдает их на управление.
Непосредственное (прямое) цифровое управление получается
при подаче команд (через ИМ) на вход объекта.
Для сложных технологических процессов команды управ-
ления от УВМ подаются на изменение заданий локальных АСР
(и, возможно, на установку оптимальных настроек регулятора
локальных АСР). При такой структуре работоспособность со-
храняется и при отказах УВМ.
Помимо рассмотренной работы УВМ в замкнутой системе
управления (с обратной связью), возможно управление по разом-
кнутой схеме по принципу программного управления (УВМ
вырабатывает программу команд Xi на входе объекта без теку-
щих измерений выходных величин у{) и в режиме советчика»
оператору (по текущим измерениям y
t
команды выдаются
в виде советов человеку-оператору).
Глава 9
РАСЧЕТЫ ПРИ АНАЛИЗЕ
И ПРОЕКТИРОВАНИИ АСР И АСУТП
§ 9.1. АНАЛИЗ ДИНАМИЧЕСКИХ ПОГРЕШНОСТЕЙ.
СИНТЕЗ ИЗМЕРИТЕЛЬНЫХ АЛГОРИТМОВ
При разработке, внедрении, обслуживании АСР и АСУТП
встречаются различные расчеты, главные из которых рассмат-
риваются ниже.
Рассмотрим оценку динамических погрешностей измери-
тельных систем. Если на вход измерительной системы пода-
стся измеряемый полезный сигнал y(t)=£const и помеха n(t),
приведенная к входу, то результат измерения на выходе y*(t),
205
вообще говоря, не равен измеряемой величине y(t) и появля-
ется текущая погрешность e(t)=y*(t)—y{t). Эта текущая по-
грешность обусловлена динамическим искажением полезного
сигнала (запаздыванием и т. п.) и помехой e(t) =e
n
(t) +e
y
(t).
Спектральная плотность погрешности S
E
на выходе
5
е
(©) = S
ei
, + S
en
= | ^ис-11
2
5
у
(со) + | W\* S
n
(со),
где Sy(co), 5
n
(co) — спектральные плотности соответственно
сигнала и помехи.
Суммарная мощность, т. е. средний квадрат погрешности е
2
определяется интегрированием 5
8
(со) по формуле Боде —
Шеннона
оо
8
2
=0,5зх-
1
{ S
8
(co)dco. (9.1)
—оо
Если выполнить это интегрирование, то увидим, что е
2
яв-
ляется функцией параметров измерительной системы, входя-
щих в Wyi
C
(j(i)), и частотных свойств входных сигналов и по-
мехи. Дальнейший анализ связан с выяснением влияния этих
параметров на величину е
2
, а при синтезе потребуется так по-
добрать параметры измерительной системы, чтобы погрешность
е
2
была либо минимальной, либо не превышала заданного пре-
дела.
Перейдем к анализу погрешностей типовых алгоритмов из-
мерения. Помимо простого измерения текущей величины, на
практике применяют различные алгоритмы обработки измеря-
емых сигналов: дифференцирование сигнала, интегрирование
сигнала, интерполяцию по дискретным данным, прогнозирова-
ние и другие операции преобразования сигнала.
Если желаемая передаточная функция (точнее, комплекс-
ный коэффициент передачи) обработки сигнала имеет вид
№
ж
(/со), то средний квадрат погрешности
оо
?=д + е^ = 0,5я-
1
J |r
HC
(/co)-^(/co)|
2
S^(co)dco +
—оо
оо
-т-О.блг
1
J |ir
HC
(ico)|
2
S
n
(co)dco. (9.2)
—оо
Если нужно просто измерить сигнал, то \^
ж
(/со) = 1. Если
надо продифференцировать сигнал, то №
ж
(/со) = /со, так как
оператор дифференцирования р = /со; если проинтегрировать, то
№ж(/'со) = 1/(/со), так как оператор интегрирования 1/р= 1/(/со) -
Таким путем распространяется применение формулы Боде —
Шеннона на любые динамические звенья и системы.
В дискретных измерительных системах информация (на-
пример, при обегающем контроле), как правило, поступает
206
*и(°)-*иМ
6
* » a*(t) eftj
У'У k • r—j |
Рис. 9.1. К погрешностям измерений
с некоторым запаздыванием т. Для запаздывающих измерений
передаточная функция W
HC
=exp(—т/со), а желаемый оператор
W
m
=l. По формуле (9.2) получаем
оо
8
2
=0,5JX
-1
J | exp (— /сот) — 11
2
S
y
(co)
d
co
+
—oo
oo oo
+ 0,5я-
х
J |exp( — / сот) |
2
S„ (со) d со = 0,5л-
1
j' (2—
—oo —oo
oo
—2cos сот) 5
v
d со + 0,5л-
1
J S
n
(со) d «> = 2R
y
(0) —2R
y
(т)-| R„ (0).
—oo
(9.3)
Полученная связь составляющей e
y
2
с корреляционной
функцией R
y
(x) поясняется на рис. 9.1, а.
Оценим погрешность ступенчатой интерполяции при ди-
скретном контроле, производимой по последней измеренной ор-
динате, на время т вперед (рис. 9.1, б). По отношению к по-
следней ординате имеем запаздывание на время т и, согласно
формуле (9.3), в точке внутри интервала дискретности Т имеем
ожидание квадрата погрешности е
2
(т) =2| /<*,/(())—/?
?/
(т)] +
+ R
n
(0). Средний по всему интервалу дискретности Т квадрат
погрешности
т
e* = 2T-^[R
y
(0)-R
y
(T)]dT-\-R
n
{U)-
о
Оценим средний квадрат погрешности линейной интерполя-
ции, которая ведется по алгоритму (рис. 9.1, п)\
V*{t) = y{t-*) + T:T-
1
[y{t + T—T)-y{t-T;)] +
+ n(t — %) + %T-
x
[n{t-\-T —т)—n(t—т)], (9.4)
207

при %>Т получается экстраполяция, при х<Т— интерполяция.
Для этого алгоритма можно получить е
2
без формулы Боде —
Шеннона, действуя прямо по формуле
гЦх)=Пш^- J [y*(t)-y(t)?dt.
Подставим значение у* (t) из формулы (9.4), возведем
в квадрат s{t) и будем вычислять интеграл с учетом опреде-
ления корреляционной функции R
y
(t) сигнала и помехи R
n
(t)
и с учетом, что их взаимно-корреляционная функция из-за не-
коррелированности равна нулю.
Получим для момента т внутри интервала Т:
ё
2
(т) = [1 +(тТ-
1
)
2
+ (1 +ТТ-
1
)
2
] R
y
(0)-2 (1 +
+ тТ-
1
) R
y
(т) + 2тТ~
1
Я
у
(т-Т)-2 (1 + тГ"
1
) R
y
(т) +
+ [(1+тГ-
1
)
2
+ (тТ-
1
)
2
] R
n
(0)-2(l-i-xT-
l
)%T-
1
R
n
(T). (9.5)
Аналогично можно анализировать многоточечные алго-
ритмы параболической интерполяции или иной обработки из-
меряемых сигналов.
Скажем несколько слов о задачах синтеза по минимально-
квадратичному критерию. В формуле (9.2) надо минимизиро-
вать е
2
путем подбора оптимальной передаточной функции из-
мерительной системы W
uc
при заданных W
x
, S
y
, S
n
. Если при
этом задача сводится к определению ряда параметров а,-, на-
пример, №
ис
= Кис/(
а
оР
2
+ 01р+1), то ключевыми являются
уравнения де
2
/да
0
= 0, de
2
/dai=0 и т. д. Этим путем могут ре-
шаться задачи выбора оптимальных интервалов опроса дат-
чиков в обегающих системах централизованного контроля.
Пример. Выбор оптимального интервала опроса при линейной интер-
поляции с минимизацией
т т
#(T)=-2-Ry{0)+-^Ry(T)+-±-! R»(T)d% + -±-$xR
y
{x)dT +
3 3 /о /о
..
f
Afl
n(
o)
+
-L R
n
(T),
о о
получаемой из выражения (9.5) усреднением на периоде Т. Исходные дан-
ные:
R
y
(т)
- а
2
ехр ( - pV) = ехр (- т)
2
;
R
n
(т)
= а
2
ехр (-а |т|) = 0,5 ехр (- 1,5 | т|).
Придавая Т ряд значений, получаем:
Т, мин
Р. (мВ)
2
Откуда Гонт=0,75 мин.
208
0
1
0,5
0,884
1
0,884
2
1,482
10
3,3
Рассмотренная классическая минимально-квадратичная тео-
рия анализа и синтеза применима не только к локальным из-
мерительным системам, но и к автоматизированным системам
аналитического контроля (АСАК), которые являются подси-
стемой АСУТП на ОФ.
§ 9.2. АНАЛИЗ УСТОЙЧИВОСТИ САУ
После изучения трех главных типов компонентов САУ
1
(объ-
ектов, измерительных систем, управляющих компонентов, т. е.
регуляторов, УВМ) целесообразно изучать САУ в целом и
сосредоточить внимание на задачах анализа и проектирования
(синтеза).
Первый шаг анализа типовой САУ — составление уравнения
или передаточной функции САУ. Далее все сводится к мате-
матическому анализу уравнения. По виду уравнений разли-
чают линейные САУ, которые описываются линейными диф-
ференциальными уравнениями с постоянными коэффициен-
тами; САУ с запаздыванием, которые включают в себя мненья
запаздывания с передаточной функцией ехр (—хр)\ импульс-
ные линейные САУ, в которых сигнал действует в дискретные
моменты времени и которые описываются разностными урав-
нениями; нелинейные САУ, которые содержат нелинейные эле-
менты (стабилизирующие САУ с релейным и т. п. регулятором
либо экстремальные САУ).
В задачи анализа входит установление устойчивости САУ
и определение качества переходных процессов при типовых,
часто ступенчатых, воздействиях (последнее связано с нахож-
дением импульсной или ступенчатой переходной функции САУ
путем решения уравнений САУ). Анализ устойчивости САУ
проводится по корням характеристического уравнения с по-
мощью алгебраического критерия Рауса, частотными методами.
Для типовой САУ (см. рис. 7.3) в общем случае передаточ-
ная функция имеет следующий вид (см. § 7.7):
W
c
АУ
(Р)
= У
(РУУО
(Р)
= (h
m
p
m
+ • • • + b
lP
I
/>о)/(я
0
/>"
-1
-
+ . . . + dn-tf + a
n
); m < /2.
Алгебраическое уравнение, получаемое им знаменателя пе-
редаточной функции (или из левой части соответствующего
дифференциального уравнения) в виде а
0
Х" +а\к
п
~
1
+ .. .+
-fa„_ii-fa
n
=0 называется характеристическим уравнением
САУ.
1
Термин «система автоматического управления (САУ)» включает в себя
АСР (или САР) СЭР и др., т. е. является обобщающим.
209
Критерий устойчивости САУ формулируется так: если все
корни 7w характеристического уравнения отрицательны или
имеют отрицательные вещественные части, то САУ устойчива;
если хотя бы один корень имеет положительную вещественную
часть, то САУ неустойчива.
Обосновывают критерий следующим образом. Передаточ-
ной функции Wc
A
y соответствует дифференциальное уравнение
а
0
у
{п)
+ ... +апг/ = 6
0
г/о+ ••• +b
m
y
0
(
m
\ Если внешних воздействий
нет, т. е. задание не изменяется во времени и правая часть
уравнения равна нулю, то свободное движение САУ (когда она
выведена из состояния равновесия) описывается решением
уравнения
ЩУ
(
о
п)
-г- • .+ВД = 0 (9.6)
при начальных условиях (начальном отклонении от состояния
равновесия), которые могут быть вызваны, например, дейст-
вием возмущения z(t). Неучтенные возмущения z отклоняют у
от равновесного значения и появляется переходный процесс
y{t). Если система возвращается к состоянию равновесия, т. е.
y(t)-*y
0
= 0 при /—>-оо, то САУ устойчива; если y(t)^oo при
t-+oo, то САУ неустойчива.
Решение уравнения (9.6) имеет вид
п
y{t)=Z C
t
exp (ЯД
где Xi — корни характеристического многочлена; Cj = const —
постоянные коэффициенты, зависящие от начальных условий.
Видно, как бы ни были велики числа С* (начальное возму-
щение системы), при всех отрицательных Я* вся сумма будет
стремиться к оо при наличии хотя бы одного положительного
Яг и САУ тогда неустойчива.
Были еще найдены обходные методы, которые без вычис-
ления корней устанавливают, лежат ли они слева от мнимой
оси или нет (критерии Рауса, Гурвица). В этих алгебраических
критериях составляют в определенном порядке комбинации
коэффициентов характеристического многочлена и по знакам
(+ или —) комбинаций определяют устойчивость САУ. В ча-
стности, полезно простое правило: если в ряду положительных
коэффициентов характеристического уравнения хотя бы один
коэффициент отрицателен, то САУ заведомо неустойчива.
Из различных частотных критериев устойчивости наиболее
широкое применение нашли критерии Найквиста, Михайлова,
оценка устойчивости по логарифмическим частотным характе-
ристикам. Частотные критерии пригодны как для систем с со-
средоточенными параметрами, так и для САУ с запаздыванием
(в отличие от алгебраических критериев, которые для САУ
с запаздыванием непригодны).
210
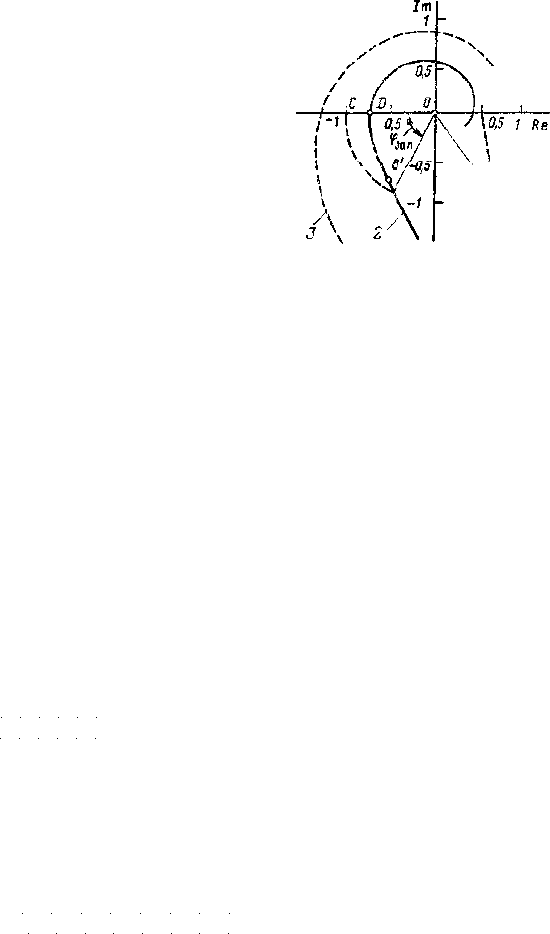
Рис. 9.2. Годограф Найквиста
\huj= 0,02 рад/с
Л
При использовании критерия Найквиста необходимо постро-
ить годограф (рис. 9.2) передаточной функции (комплексного
коэффициента передачи)
W
pa3
(/со)
=
WperWooWnc
разомкнутой
САУ и посмотреть, охватывает ли этот годограф точку с коор-
динатами (—1; 0) или нет. Если не охватывает, то САУ устой-
чива, и наоборот.
Преимущества критерия Найквиста: годограф разомкнутой
САУ построить проще, чем замкнутой; достаточно построить
не весь годограф, а в окрестностях критической точки с коор-
динатами (—1; 0); чистое запаздывание т легко учптыилстся
при построении годографа.
W
Пример. Дана САУ, для которой №
О
б = 0,01 ехр (—60р)/(1Г)0/Ч-1);
ис
=1; Ирег = *
р
[1 + 1/(7'ир)+Гдр]=320[1 + 1/(102р)+24р]. Частотная харак-
теристика разомкнутой
САУ без
учета
запаздывания
W
vit:
,-
0,01-.42011
+
+ 102/(0 + 24- 102(/со
2
)]/[( 15/(0+1) • 102/©]; [©] = с"
1
.
Отсюда получаем действительную и мнимую части для годографа
№
Р
аз(/(0) : Re(co) =3,2(24- 102- 150ш
4
—48co
2
)/[102w
2
(150
2
(o
2
+1); lni(oi) 3,2Х
Х(Ю2-126(о
3
+ (о)/[102(о
2
(150
2
(о
2
+1)].
Для построения годографа разомкнутой САУ без учета tana чдииаиия
проведем вычисления в следующей форме:
<о, рад/с ....
Re
Im
0
1,51
—оо
0,01
0,82
—2,24
0,02
0,611
—0,65
0,1
0,514
—0,18
1
0,513
1,8 КГ
1
оо
0,51,5
0
По этим данным строим годограф (штриховая линия / па рис. 9.2).
Влияние запаздывания сводится
к
умножению вектора
W
t
,
nn
на
число
ехр (—т/о). Амплитуда этого комплексного числа равна единице, а фаза
Фзап = —то). Следовательно, при таком умножении каждая точка годографа
без изменения ее расстояния от начала координат повернется по часовой
стрелке (так как ф
за
п<0) на угол, равный а
д
„м- «|'"><» -
z
—
Т(0
- Например,
точка В повернется на угол поворота а
ДО
в = 0,02 • 60••- 1,2 рад — в В'. Здесь
т = 60 с; (0 = 0,02 рад/с. Для примера углы поворота примяты следующими:
0,02
1,2
0,1
6
ш, рад/с 0 0,01
адов, рад 0 0,6
По этим данным строим годограф с доворотом (кривая 2 на рис. 9.2).
Видно, что САУ в этом примере устойчива. Пример неустойчивой САУ —
годограф 3 (см. рис. 9.2).
211
Иногда требуется оценить не только устойчивость или не-
устойчивость САУ, но и запас устойчивости. Существуют два
параметра запаса устойчивости: по амплитуде и по фазе. Запас
по амплитуде может быть оценен размером отрезка CD (см.
рис. 9.2); при оценке запаса по фазе проводят из начала коор-
динат окружность единичного радиуса до пересечения с годо-
графом; полученный угол ф
за
п и есть искомый.
Обоснование критерия Найквиста: охват точки с коорди-
натами (—1, 0) годографом означает, что гармонический сиг-
нал некоторой частоты проходит через разомкнутую цепь
САУ, увеличиваясь по амплитуде и сдвигаясь на —180° по
фазе; замыкание САУ еще добавляет сдвиг на —180°; упомя-
нутая гармоника разрастается, т. е. САУ неустойчива.
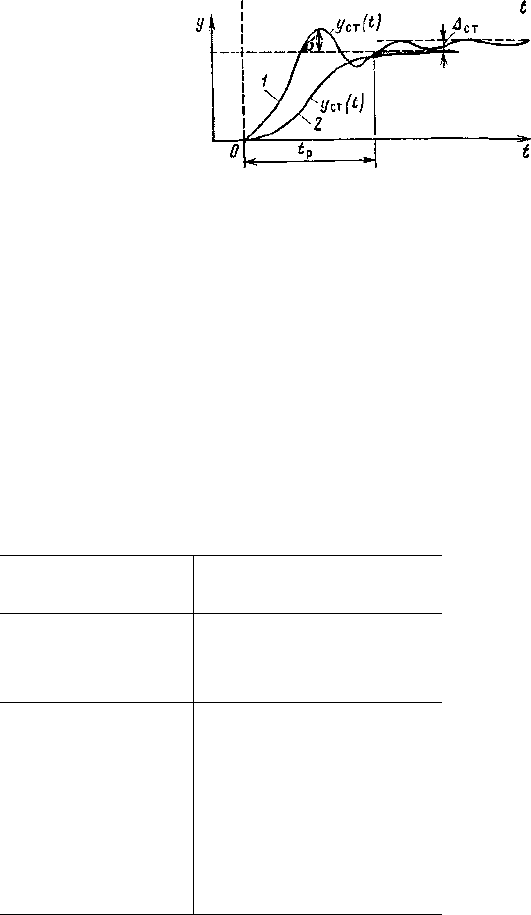
§ 9.3. АНАЛИЗ КАЧЕСТВА РЕГУЛИРОВАНИЯ
ЛИНЕЙНЫХ САУ
Понятие качества регулирования обычно связывают со ступен-
чатыми переходными функциями y
C
i{t) САУ (см. рис. 7.6, б и
рис. 9.3). Качество регулирования оценивают следующими па-
раметрами:
временем регулирования /
р
, в течение которого выходная
величина приходит к новому заданию (входит в 5 %-ю область
около нового задания);
степенью перерегулирования о, т. е. амплитудой первой по-
луволны, выраженной в процентах от установившегося значе-
ния г/ст(/) при t-^oo. Для кривой 1 а = 20 % (см. рис. 9.3); для
кривой 2 (а = 0);
частотой колебаний пг, т. е. числом полуволн до того мо-
мента, как переходный процесс приходит к новому заданию
(обычно допускается т = 2-^-4);
статической погрешностью Д
С
т — отклонением от задания
в установившемся режиме.
Идеальной САУ является такая, у которой /
р
->0 и величина
y(t) мгновенно переходит к новому заданию уо\ чем больше
/
р
, тем менее быстродействующей является САУ. Задача ана-
лиза качества регулирования САУ — найти значения упомяну-
тых параметров, что связано с нахождением у
С
тЦ) [или
//ими (/)]. Существуют различные методы анализа: классический,
операторный, частотные.
Классический метод заключается в нахождении решения
дифференциального уравнения САУ классическим путем с уче-
том, что уравнение САУ имеет общее решение в виде
п
У (0 = Z
C
i
ех
Р (М) + //част (0»
1=1
212
Рис. 9.3. Типовые ступенчатые y
s
k
переходные функции САУ
где г/част(0 — зависит от вида возмущения на входе САУ (сту-
пенчатое, импульсное и т. д.).
Операторный метод включает нахождение изображения по
Лапласу по формуле (7.5) входной величины у
0
(/)-•>//<) (Р) i
|,;ш
*
бражения выходной величины по формуле у(р) ~Wc„\y(p)yo(p);
по известному изображению у(р) оригинала у{1). Д.мя утого
служат изображения по Лапласу (табл. 9.1).
Как правило, получающиеся при анализе системы ii.tofipn
жения у(р) сложнее табличных, и нужно уметь проводин, их
к табличному виду.
Ступенчатый входной сигнал имеет изображение I (/)*'•!//;
а изображение выходного сигнала для САУ //
(
i (p) ->
= W
CA
y(p)(l/p).
Таблица 9.1
Типовые изображения по Лапласу
Оригинал
у (t)
1 (/)
t
n+1
/(n+\) !
exp (— at)
sin co^
COS (Ht
exp (— at) sin to/
exp (— at) cos (at
Изображение по Лапласу
oo
У(Р) = J' 1/(0 exp ( p I) (1/
0
1/P
1/pn+i
l/(p + a)
co/(p
2
+ со
2
)
Pl(p
2
+ w
2
)
a>/[(p+a;
a
+ u>
a
]
(p + a)/([p -j- a)
2
+ со
2
]
213-
Видно, что изображение выхода отличается от табличного
изображения по Лапласу.
Для приведения к табличным изображениям по Лапласу
применяют разложение на простые дроби
Ь
0
+ . . . + Ь
тР
т
1
^САУ (Р) (1/р)
а
0
Р
п
+
Аг
• + а
п
р
i Ап
р ' р—К ' ' р—К
Для вычисления констант Л
0
, ..., А
п
приводят правую часть
к общему знаменателю; сокращают знаменатели; приравнивая
коэффициенты при одинаковых степенях р, составляют равен-
ства для вычисления констант (метод Лагранжа).
На практике часто пользуются изображением по Карсону—
Хевисайду; эти изображения отличаются от изображений по
Лапласу отсутствием множителя \\р.
Согласно одному из частотных методов, вычисление им-
пульсной переходной функции ведут по следующей формуле:
оо
г/имп (0 = (2л)-
1
( Re
CAy
(ю) cos co£ d со,
о
где RecAy — действительная частотная характеристика замк-
нутой САУ. Формула применима также к анализу САУ с за-
паздыванием.
Мы рассмотрели методы нахождения переходных процессов
САУ, вызываемых ступенчатым или импульсным воздействием.
Если требуется найти переходные процессы, вызываемые более
сложным воздействием yo(t), это также можно сделать с по-
мощью классического или операторного методов по изложен-
ным выше правилам. Однако если импульсная (или ступен-
чатая) переходная функция г/
И
мп(/) известна, то реакцию САУ
y(t) можно найти с помощью интеграла Дюамеля
y(t) = .1 у
И
мп (0 yoit—tydk.
о
§ 9.4. ПРОЕКТИРОВАНИЕ
И НАСТРОЙКА СТАБИЛИЗИРУЮЩИХ САУ
Проектирование (синтез) нацелено на выбор параметров,
структуры, реализацию САУ, удовлетворяющих заданным ка-
чествам и требованиям. Вводят методы оптимального синтеза,
которые направлены на создание систем, удовлетворяющих
критериям оптимальности. Критерий оптимальности не пред-
указан и выбирается исходя из конкретной ситуации. Таким
образом, при синтезе заданным (выбранным) считается кри-
214
I 1—I—I 1 1 I il I I I I I '""",1 i ~ i
0,1 0,5 1 tt
Q
$/r
0
5 О 0,Z 0,5 1 5-Cti/Ttf
Рис. 9.4. Номограммы для выбора типа регулятора (алгоритма):
а — для САУ без перерегулирования (0=0); б — для САУ со степенью перерегулирова-
ния а=20 %
терий оптимальности, а также другие дополнительные условия
(объект автоматизации, условия его работы и т. д.) н необхо-
димо спроектировать систему, удовлетворяющую критерию п
дополнительным условиям.
Существует ряд сравнительно точных и упрощенных мето-
дов синтеза САУ. Ниже рассмотрены упрощенные методы. За-
дачи ограничим только выбором настроечных параметров ста-
билизирующих регуляторов (алгоритмов) и типа регулятора
по заданным характеристикам объекта и требованиям к каче-
ству регулирования. Например, для ПИД-регу.лятора при син-
тезе надо выбрать настроечные параметры /е
р
, Г„, 7'
д
но задан-
ным характеристикам объекта автоматизации н требованиям
к САУ.
Синтез по упрощенным передаточым функциям объекта
№об = Кобехр(—х
0
бР)/(Т
0
бР+1) начинают с выбора типа регу-
лятора или алгоритма (П, ПИ, ПИД и т. д.) по заранее
найденным номограммам (рис. 9.4, а). Помимо степени пере-
регулирования а, другим заданным показателем при синтезе
является требуемое время регулирования t
v
и СЛУ.
Для САУ с перерегулированием вместо /,, можно брать
/
р
* — время выхода первой полуволны //<•!•(/) на асимптоту
у
ст
(оо) (см. рис. 9.4, а). Номограммы отвечают на вопрос, ка-
кой закон регулирования ПИД, ПИ, П, ПИР, ПИП или Р
С!
(трехпозиционный регулятор постоянной скорости) выгоднее
выбрать по известным параметрам объекта Ков, Т
об
, т
0
б и тре-
бованиям к САУ, включая время регулирования t
v
, степень пе-
ререгулирования о; кривые регуляторов, расположенные ниже
215
"Таблица 9.2
Выбор настроечных параметров регуляторов
Тип
регуля-
тора
п
пи
пид
п
пи
Типовой процесс регулирования
Апериодический
процесс (без пере-
регулирования) о = 0
Степень перерегули-
рования о = 20 %
Минимизация среднего
квадратического
отклонения
Для объектов вида W
Q
Q = Коб
ех
Р (—^обР)ИТобР + 1)
k
v
= 0,ЗТ
об
!(Коб^оп)
k
v
— 0,6Т
О
б/(К
О
(&об)
Т
и
= 0,6Т
об
kp = 0,95Т
об
/(Коб^об)
Т
и
= 2,4т
об
;
Тд = 0,4т
об
kp = 0,7Т
об
/(Коб^об)
kp = 0,7Т
о6
/(К
о
&обУ*
Т
и
= 0,7Т
об
k
v
= l,2T
OD
/(IWo6);
Т
и
= 2т
0
б;
Т
д
= 0,4т
об
k
r
= 0,9Т
об
/(/С
об
Тоб)
k
p
= о,1Т
0
б/(/с
0
б
г
об);
Т
и
= Т
0
б
k
p
= i AT
об
/(К обЧб);
Г
и
= 0,3т
об
;
Т
д
= 0,5т
о
б
Для объектов вида Wоб — ехр (—T
0
QP)/(T
0
QP)
kp = 0,4Го
б
/тоб
k
v
= о,4Г
об
/т
0
б;
Т
и
= 6т
об
kp = 0,7^6^06
k
p
= 0,7T
o6
h
o6
;
Т
и
= Зтоб
Не применяют
kp — 7об
т
об",
Т
и
= 4т
об
изображающей точки Л на номограмме обеспечивают эти тре-
бования.
Пример. Задано /Соб = 1; Т
0
б = 3,4 мин; т
0
б = 13 мин; t
p
= 80 мин; пере-
регулирование недопустимо. Находим координаты точки А: £
Р
/тоб=80/13 =
=6,15; Тоб/Т
0
б=3,8 и видим по номограмме для ог=0, что требования могут
обеспечить ПИ-, ПИД-, ПР1Р-, ПИП-алгоритмы. Следует выбрать ПИ-регуля-
тор как более простой, хотя остальные дают лучшее качество регулирования.
Выбрав тип регулятора, нужно вычислить его настройки
(табл. 9.2). Критерий минимума квадрата отклонения дает
перерегулирование до 40 %, но меньшее время регулирования.
Пример. Дано k
O
6=0,5
l
; т
0
б = 5 мин, Тоб = 10 мин. Допустим, что по
заданному /
р
выбран ПИ-регулятор, требуется определить его нстройки. Для
условий Д
2
-нтип (см. табл. 9.2) получим /г
Р
= 0,1 • 10/(0,5 • 5) =4; Ги=10 мин;
№рег = 4[1+ 1/(10/))].
Частотные методы также используют для выбора настроеч-
ных параметров регуляторов (табл. 9.3).
Колебательный переходный процесс относится к САУ, ко-
торые отрабатывают единичные возмущения с коэффициентом
затухания 0,25 (коэффициент затухания равен отношению двух
соседних амплитуд затухающего колебания в системе). Исход-
ной информацией об объекте является годограф Woeija), из
которого находят частоту о)
К
р и амплитуду Л
кр
точки пересече-
ния годографа с действительной осью (точка D, см. рис. 9.2).
1
&об определяется отношением показания (выраженного в процентах
шкалы) прибор;!, регистрирующего значения выходного параметра, к ходу
исполнительного механизма (выраженному в процентах).
216
Таблица 9.3
Выбор настроечных параметров регулятора по частотным характеристикам объекта-
Тип регуля
П
ПИ
ПИД
ПИД
тора
Настроечные
kp= 1/(2Л
кр
)
k
p
= 1/(2,2.4
кр
);
Г
и
= 1/(1,2©
кр
)
kp= 1/(1,7Л
кр
);
Т
и
= 1/(2©
кр
);
Тд= 1/(8©
кр
)
tip и А
кр
;
т\ = 1/(Зю
кр
);
Г
д
= 1/(2ш
кр
)
параметры
Примечание
При апериодическом про-
цессе регулирования
При колебательном переход-
ном процессе
Пример. Из годографа Wоб(j(o) установили, что
CDKP^I
рад/мин;
Л
К
р=0,7. Если требуется определить настроечные параметры ПИ-рсгулитора
для апериодического режима регулирования, то пользуясь табл. 9.3, полу-
чаем £
р
= 1/(2,2-0,7) = 1/(0,154); Т
я
= 1/1,2 мин.
При синтезе статистическими методами считают, что
к входу САУ приведена помеха п
вх
со спектральной плотно-
стью vS
nB
x(co); кроме того, действует полезный сигнал //<)(/) со
спектральной плотностью S
yo
(со). В стабилизирующих САУ за-
дание y
0
(t) =const неизменно и поэтому спектральная плот-
ность Sy
g
(G>) = 0 на всех частотах, кроме со = 0; в следящих
системах, в которых задание меняется во времени, S
Uu
(ui) Ф0.
Для следящих САУ, зная 5
пвх
((о), Sy
0
(со) и W
0
c,(p) можно
составить уравнение для средней квадратической погрешности
на выходе САУ по формуле Боде—Шеннона (9.1):
оо
е^Сбя-
1
I
|^САУ-1|
2
5^,(1(
(
Н-
—
00
оо
+ 0,5я~
1
J |R7
CAy
|
2
S„
BX
d(o.
—оо
Искомая передаточная функция алгоритма W
P
,.
r
(p) подби-
рается таким образом, чтобы e
2
->min. В рассматриваемых зада-
чах вместо №
Р
ег(/со) надо выбирать классические настроечные
параметры k
v
, Г
н
, Т
л
. Поэтому в результате всех вычислений
получается, например, для ПИ-регулятора Р.
2
=
1-
2
(&
Р
,
Т
И
). Далее
^р.опт и Ги.опт можно вычислять, решая систему уравнений
de
2
(kp, T»)/dk
p
= 0; дг* (k
v
, Т
щ
)/дТ
ы
= 0.
Перейдем к методам настройки параметров регулятора САУ
в производственных условиях. Во-первых, табличный подход
217
к выбору настроечных параметров (см. табл. 9.2, 9.3) остается
в силе, но надо помнить, что для снятия характеристик объекта
УстУ)
или
W
0
Q(P)
надо отключить регулятор (переключателем
«АВТ», «Ручное»). Во-вторых, возможны следующие рекомен-
дации, не требующие отключения регулятора (Зиглер—Ни-
кольс).
В методе незатухающих колебаний на границе устойчивости
САУ запускают с малым пропорциональным воздействием
ПИД-алгоритма
W
v&T
= k
v
[\ + H
{Т^р)+Т
ж
р];
к
Р
Ф0;
Г
и
-»~оо;
Г
д
->0; величина k
v
постепенно увеличивается, и после каждого
увеличения делается пробный скачок задания у
0
, когда САУ
достигает границы устойчивости при k
v
= k
TV
, возникают незату-
хающие колебания выхода y(t) с периодом Г
гр
= 2л;соГр • Далее
устанавливают настройки: для П-алгоритма &
р
= 0,5 &
гр
, что
дает запас устойчивости по амплитуде, равный 2; для ПИ-ал-
горитма &р = 0,45 &
гр
Г
и
= Г
гр
/1,2 (введение Т
а
уменьшает на 15°
запас по фазе относительно предыдущего случая); для ПИД-
алгоритма &
р
= 0,6 /г
гр
; Г
и
= Г
гр
/2; Г
д
=Г
гр
/8.
В методе затухающих колебаний не обязательно доводить
k
v
до граничного k
rp
, а можно остановиться раньше &
р
= &
гр
, ко-
гда колебания в САУ еще носят затухающий характер, напри-
мер, с отношением амплитуд т = Л
;+
1/Л
г
= 0,25 и периодом
Т
т
= 2л(})т~
1
- Далее устанавливают настройки: для П-алго-
ритма k
p
= k
vm
в соответствии с желаемым затуханием т = 0,25
или др.; для ПИ-алгоритма k
v
= k
vm
; T
n
= T
m
; для ПИД-алго-
ритма &
р
= /с
рто
; Т
И
= Т
т
/\,5; Т
Л
= Т
т
/6.
Для сложных технологических объектов с большими т
0
б и
Т
об
ПИД-алгоритм не обеспечивает высокого качества регули-
рования и требуется синтез структурно других алгоритмов (см.
§ 8.2), что важно в задачах АСУТП и эффективно при приме-
нении УВМ.
Глава 10
АВТОМАТИЗАЦИЯ ПРОЦЕССОВ
РУДОПОДГОТОВКИ
§ 10.1. О ЦЕЛЯХ АВТОМАТИЗАЦИИ РУДОПОДГОТОВКИ
Процесс обогащения включает два главных этапа: рудоподго-
товку н сепарацию. Во взглядах на управление обогащением
выделим два основных подхода:
управление с обратной связью по измеряемым технологиче-
ским показателям у
к
, |3
К
, е
к
;
218
управление посредством учета фракционного состава сырья
Y(£). Р(£)
И
сепарационных характеристик е(£) аппаратом и
схем и с возможностью прогнозирующих расчетов ~у
к
, [$
к
, р,
к
.
В первом, традиционном подходе управляющие воздейстмня
манипулируют таким образом, чтобы удовлетворить критерию
оптимальности /, связанному с у
к
, р"
к
, ё
к
, которые_измеряются
как «выход объекта»; например, максимизация у
к
при ~р
к
=
= const или максимизация прибыли / = у
к
/ц(]3к) с учетом цен
/ц(Рк) на концентраты разного сорта. При таком подходе обо-
гатительная фабрика часто рассматривается как «черный
ящик», причинно-следственные связи внутри которого неизве-
стны и заменяются экспериментальными (регрессионными) мо-
делями.
Второй подход позволяет более определенно ставить и ре-
шать задачи управления отдельными этапами обогащения и
может комбинироваться с первым.
В рамках второго подхода рассмотрим, прежде всего, цели
рудоподготовки.
При рудоподготовке важно учитывать фракционный сопам
минерального сырья и продуктов; его необходимо и достаточно
оценивать функциями двух типов (рис. 10.1):
у(1) — распределение частиц по фракциям, причем уМ,)<1£
есть массовая (или объемная) доля элементарной фракции
[I, l + dg]; размерность у(£) обратна размерности £, т. е. |у|
= !/[£];
Р(£) — содержание (%) ценного (или вредного) компонент
в элементарных фракциях. Здесь | — физическое свойство чл-
стиц, например, / — крупность, р — плотность, %
ш
. магнитная
восприимчивость, k — флотируемость, ф — светимость. Фракци-
онный состав определяется различными методами аналиш: си-
товым или седиментационным для нахождения у{1) и Ц(/); дон-
симметрическим для у(р) И р(р); магнитным длиу(х»«) 'ЧИХ'»);
флотометрическим для y(k) и р(&); радиометрическим для
Y(<P)
И
Р(Ф).
При рудоподготовке (дроблении, измельчении, обработке
реагентами, обжиге и т. д.) характеристики фракционного со-
става сырья 7(1) и р(£.) изменяются. Желательным является
такое изменение, чтобы диапазон D (т. е. £
т
нг £<£ш
ах
) изме-
нения физических свойств частиц увеличивался и ценный ком-
понент содержался в одних фракциях (концеитратпых £>£
р
) и
не содержался в других (хвостовых £<£
Р
). Тогда при последу-
ющей сепарации можно выделить богатые копцентратные фрак-
ции в концентрат и бедные хвостовые — в хвосты. Это требует,
чтобы функция р(£) стремилась к 100 % па подобласти кон-
центрата £>£
р
и к 0 °/о на подобласти хвостов £<£,, (см.
рис. 10.1). Такая рудоподготовка является идеальной. Следо-
219