Kothari D.P., Nagrath I.J. Modern Power Systems Analysis
Подождите немного. Документ загружается.

6.1
INTRODUCTION
With
the
background
of
the
previous
chapters,
we are
now
ready
to study
the
operational
features
of
a composite
power
system.
Symmetrical
steady
state
is'
in
fact,
the
most
important
mode
of
operation
of
a
power
system.
Three
major
problems
encountered
in
this
mode
of
operation
are
listed
beiow
in
their
hierarchical
order.
1.
Load
flow
problem
2.
Optimal
load
scheduling
problem
3.
Systems
control
Problem
This
chapter
is
devoted
to
the
load
flow
problem,
while
the
other
two
problems
will be
treateil
in
later
chapters.
Lt-rad
llow
study
in
power systetn
parlance
is
the
steady
state
solution
of
the
porver
system
network.
The
main
information
obtained
from
this
study
comprises
the
magnitudes
and
phase
angles
of
load
bus
voltages,
reactive
powers
at
generator
buses,
real
and
reactine
power flow
on
transmission
lines,
other
variables
being
specified.
This
information
is
essential
for
the
continuous
monitoring
of
the
current
state
of
the
systern
and
for
analyzing
the
effectiveness
of
alternative
plans for
future
system
expansion
to
meet
increased
load
demand.
Before
the
advent
of
digital
computers,
the
AC
calculating
board
was the
only
means
of
carrying
out
load
flow
studies.
These
studies
were,
therefore,
tedious
and
time
consuming.
With
the
availability
of
fast
and
large
size
digital
computers,
all
kinds
of
power system
studies,
inciuding
load
flow,
can
now be
carried
out
conveniently.
In
fact,
some
of
the
advanced
level
sophisticated
studies
which
were
almost
impossible
to
carry
out
on
the
AC
calculating
board
have
now
become
possible.
The
AC
calculating
board
has been
rendered
obsolete
for
all
practical
purposes.
6.2
NETWORK
MODEL
FORMULATION
The
load
flow
problem
has,
in fact,
been
already
introduced
in Chapter
5
with
the
help
of
a
f'undamental
systent,
i.e.
a two-bus
problem
(see
Example
5.8)'
Eor4 lq4d flqW llq4ypfufg4l
life
power system
comprising
a large
number
of buses,
it is
necessary
to
proceed
systematically
by
first
formulating
the
network
model
of
the sYstern.
A
power
system
comprises
several
buses
which
are
interconnected
by
rneans
of
transmission
lines.
Power
is
injected
into
a
bus from
generators'
while
the
loads
are
tapped
from
it.
Of
course,
there
may
be
buses
with
only
generators
and
no-loads,
and
there
may
be others
with
only
loads
and
no
generators.
Further,
VAR
generators
may
also
be
connected
to
some
buses.
The surplus
power
at some
of
the
buses
is
transported
via transmission
lines
to
buses
deficient
in
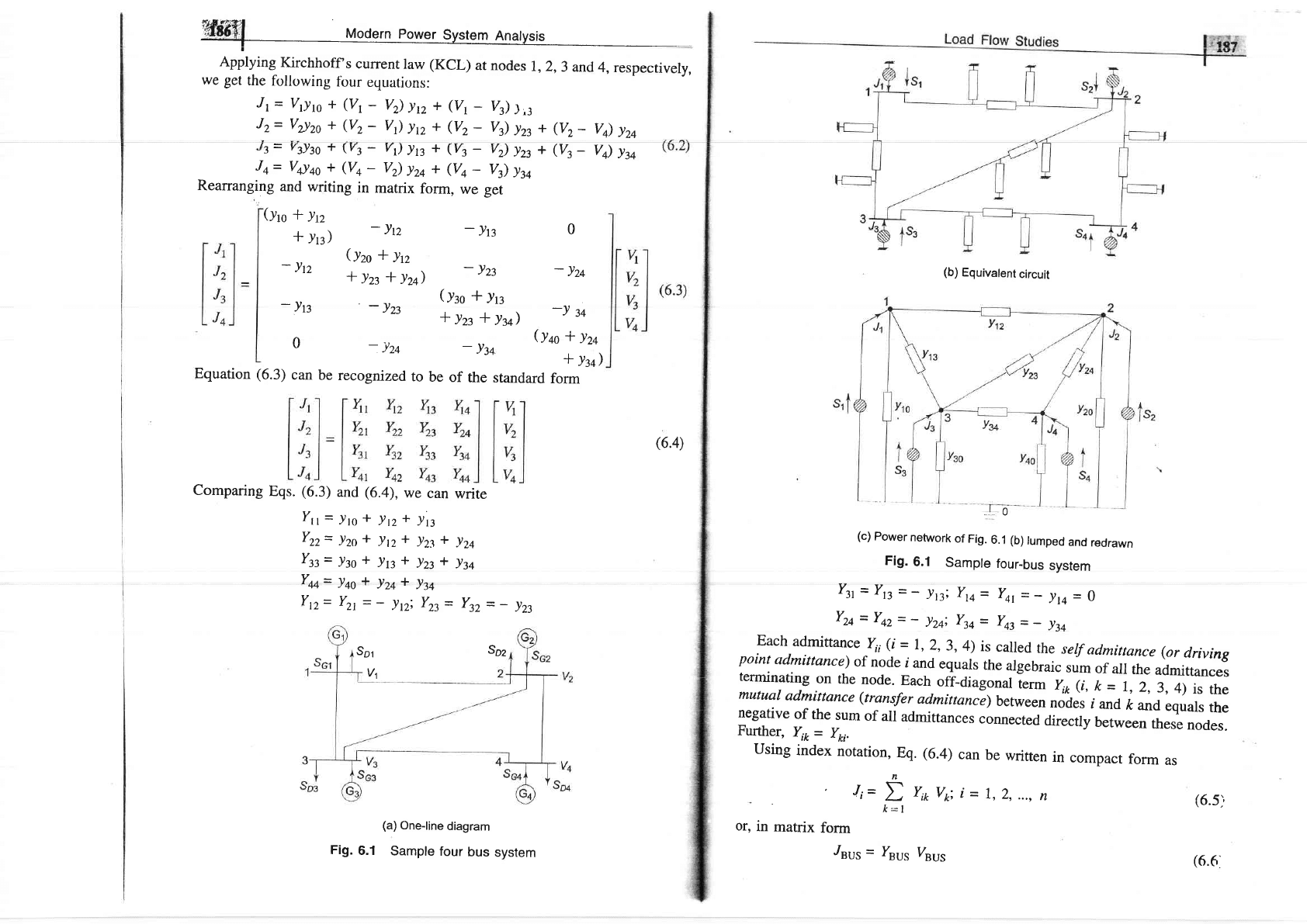
power. Figure
6.1a
shows
the
one-line
diagram
of
a
four-bus
system
with
generators
and
loads
at
each
bus.
To
arrive
at the
network
model
of
a
po*"i system,
it
is sufficiently
accurate
to
represent
a short
line by
a series
impedance
and
a long
line
by
a
nominal-zr
model.
(equivalent-7T may
be
used
foi
very
long
lines).
Often,
line
resistance
may
be
neglected
with a
small
loss
in
accuracy
but
a
great deal
of
saving
in
computation
time.
For
systematic
analysis,
it
is
convenient
to
regard
loads
as negative
generators
and lump
together
the
generator
and
load
powers
at the
buses.
Thus
at the
ith
bus,
the
net
complex
power
injected
into
the
bus
is
given
by
S;=
Pi
+
jQi= (Pci-
Po)+
j(Qci-
Qo)
where
the
corrrplex
power
supplied
by
the
generators
is
Sci=
Pot+
iQai
ancl
the
ccltnplex
power
drawn
by
the
loads
is
Spi=
Por+
iQoi
The
real
ancl
reactive
powers
injected
inttl thc
itlt
bus
arc thcn
Pi=
Poi-
P^
i
=
1,
2,
"''
fl
(6'1)
Qi=
Qci-
Qoi
Figure
6.lb
shows
the
network
model
of
the
sample
power system
prepared
on
the above
lines.
The
equivalent
power source
at
each
bus
is represented
by
a shaded
circle.
The
equivalent
power
source
at
the
ith
bus injects
current
Jr
into
the bus.
It
may
be
observed
that
the
structure
of
a
power system
is such
that
all
the
Sources
are
always
connected
to
a common
ground
node.
The
network
model
of
Fig.
6.lb
has
been
redrawn
in Fig.
6.lc
afier lurnping
the
shunt
admittances
at
the buses.
Besides
the
ground node,
it
has four
other
nocies
(buses)
at
which
the
current
from
the sources
is injected
into
the
network.
The
line
admittance
between
nodes
i and
k is
depicted
by
!ip=
Jri'Further,
the
mutual
admittance
between
lines
is
assumed
to
be
zero'
.Line
transformers
are
represented
by
tion
by
series
and
shunt
impedances,
a series
impedance
(or
for
accurate
representa-
i.e.
inverted
L-network).
apitying
Kirchhoff
s
current
law
(KCL)
at nodes
r,2,3
and
4,respectively,
we
get
the
following
fbur
equations:
Jt
=
Vrlro
+
(Vr
-
V)
ln
*
(Vr
-
Vr)
),:
Jz=
Vz)zo
+
(Vz-
Vr)
ln
+
(Vz_
V)
yzt
+
(Vz_
Vq)
yzq
s=
vztgo
+
(y:
-
v)
ln
+
(Vt
_
V)
lzz
+
(Vt_
Vq)
yzq
Jq=
Vayqo
+
(Vq
-
Vr)
lzc
*
(Vq
_
V)
yzq
Rearranging
and
writing
in
matrix
form,
we get
(yrc
*
tn
*fn,
-ln
-\z
0
.,
(lzo*ln
-
Yrz
*
hz
*
lzq,
-
lzt
-
!z+
_
!*
(y:o
*
yrg
-t23
*rzt*yy,
-lu
0
-Jz+
-
lzq
Equation
(6.3)
can
be
recognized,
to
be
of
the
standard
form
(b)
Equivalent
circuit
(c)
Power
network
of
Fig.
6.1 (b)
lumped
and
redrawn
Fig.
6.1
Sample
four-bus
system
Ylt
=
Yrc=-
lni
Yv=
Yqt
=-
)r+
=
0
Yzq=Y+z=-
lzqi
Yy=
yqz=-
ly
Each
admittance
y,,
(i
=
r,2,3,
4)
is
calred
the
serf
admittance
(or
driving
point
admittance)
of
node
i
and
equals
the
algebraic
sum
of
all
the
admittances
terminaring
on
the
node.
Each
ofi-diagonal
ierm
v*
(i,
k
=
r,
2,
3,
4)
is
the
mutual
admittance
(transfer
admittance)
between
noim
i
and
ft
and
equals
the
negative
of
the
sum
of
all
admittances
connected
directly
between
these
nodes.
Further,
Yr*
=
Yri.
using
index
notation,
Eq.
(6.a)
can
be
written
in
compact
form
as
n
Ji=
D
yp
vpi
i
=
r,2,
...,
fl
k=l
or,
in
matrix
form
"Inus
=
Isus
Vnus
(Yqa
*
yzq
*
Yz+)
Comparing
Eqs.
(6.3)
and
(6.4),
we
can
write
(6.4)
Yrr=
)ro*
ln+
ln
Yzz=
lzo
*
ltz
t
lzt
+
lzq
Ytt=
):o*
ln*
lzz*
lzq
Yu=
lqo
*
lzq
*
ly
Ytz=
Yzt
=
-
lni
YZt
=
YZZ
=
-
lZt
(a)
One-line
diagram
Fig.
6.1
Sample
four
bus
system
(6.s)
(6.6
Sor
Soz
v1
,?-blrs
system.
Furthermore,
yi*
=
0
if
buses
i
d
k
are
not
connected
(e.9.
YA
=
0).
since
in
a
power
network
each
bus
is
connected
only
to
a
few
other
buses
(usually
to
two
or
three
buses),
the
ys.y5
of
a
rarge
network
is
very
sparse'
i'e'
it
has
a
large
number
of
zero
elementi.-itrougtr
tf,i,
prop"rty
is
not
evident
in
a
small
system
like
the
sample
system
under
consideration,
in
a
system
containing
hundreds
of
buses,
the
sparsity
may
be
as
high
as
90vo.
Tinney
and
associates
[22]
at
Bonnevile
Power
Authority
were
the
first
to
exploit
the
sparsity
feature
of
zsu5
in
greatly
reducing
numerical
computations
in
load
flow
studies
and
in
minimizing
the
memory
required
as
only
non-zero
terms
need
be
stored.
Equation
(6.6)
can
also
be
written
in
the
form
urhanp V J^-^+^^ aL^ -- ^^ :
'vrrvrv
-BUS
\re,'ulsD
urc
llralnx
or
DUS
admlttance
and
is
known
as
bus
admittance
matrix.
The
dimension
of
the
y"u5
matrix
is
(n
x
n)
where
n
is
the
number
of
buses'
[The
total
number
of
nocles
ii e
m
=
n +
|
including
the ground
(reference)
node.l
As
seen
above,
yru,
is
a
symmetric
except
when
phase
shifting
transformers
are
involved,
so
that
only
nv+
t)
terms
are
to
be
stored
for
an
2
1.,.^L{"
involved
algorithms.
Furthermore,
the
impedance
matrix
is
a
fuil
matrix.**
The
bus
impedance
matrix,
however,
is
most
useful
for
short
circuit
studies
as
will
be
seen
in
Chapters
10
and
11.
Note:
In
the
sample
system
of
Fig.
6.1.
the
arDrrrary
manner,
although
in
more
sophisticated
studies
of
large
power
systems,
it
has
been
shown
that
certain
ordering
of
nodes
produfes
faster
convergence
and
solutions.
Appendix
c
deals
with
the
topics
of
sparsity
and
optimal
ordering.
6.3
FORMATION
OF
fsus
BY
SINGULAR
TRANSFORMATION
Graph
Vnus
=
Zausleus
where
Zsu5
(bus
impedance
matrix)
=
fsLs
fbr
a
network
of
fbur
buses (fbur
inclependent
nodes)
(6.7)
(6.8)
-flmmetric
rnus
yields
symmetric
Zsus.
The
diagonal
erements
of
Zuu,
are
called
driving
point
imped,ances
of
the
nodes,
and
th!
off-diagonal
elements
are
called
transfer
impedances
of
the
nodes.
Zsus
need
not
be
obtained
by
inverting
rnus.while
y"u,
is
a
sparse
matrix,-Auris
a
full
matrix.
i.e.,
zero
elements
of
I'ru,
become
non-zero
in
the
.o,,.rp"o"niing
Zsu,
erements.
It
is t'
be
stressed
here
that
yBus/zBus
constitute
models
of
the
passive
portions
of
the power
network.
Bus
admittance
matrix
is
often
used
in
sorving
road
flow problem.
It
hal
gained
widespread
application
owing
to
its
simpticity
of
data preparation
and
the
ease
with
which
the
bus
admittance
matrix
can
be
formed
ano
moOfied
for
network
changes-addition
of
lines,
regulating
transformers,
etc.
(see
Examples
6'2
and6'7)'
of
course,
sparsity
is
one
of
its greatest
advantages
as
it
heavily
reduces
computer'memory
and
time
requirernents.
In
contrast
to
this,
the
zss"
can
be
referred
to ground
or
slack
bus.
In
the
former
case,
it
is
usually
necessary
l'o
creal'e
at
least
one
strong
artificial
tie
to ground
to
avoid
numerical
difficulties
when
obtaining
Zsg5,
because
in
absence
of
this,
rr*
is
ilr-conditioned
or
even
singular'
A
large
shunt
admittance
inserted
at
the
slack
bus
most
simply
achieves
the
desired
result
[20].
**The
disadvantages
of
the
conventional
impedance
matrix
may
be
overcome
by
making
use
of
LU
factors
of the
admittance
matrix
and
bf
employing
compacr
srorage
scheme'
Piecewise
methods
or tearing
techniques
(dialoptics)
have
recently
been
applied
to
overcome
the
disadvantages
of
excessiv,
,rorug.
requirements
Ilg].
***For
convenience,
direction
is
so
assigned
as
to
coincide
with
the
assu'red
positive
direction
of
the
element
current.
i90
l
Modern
power
System
Anatysis
Or@
o
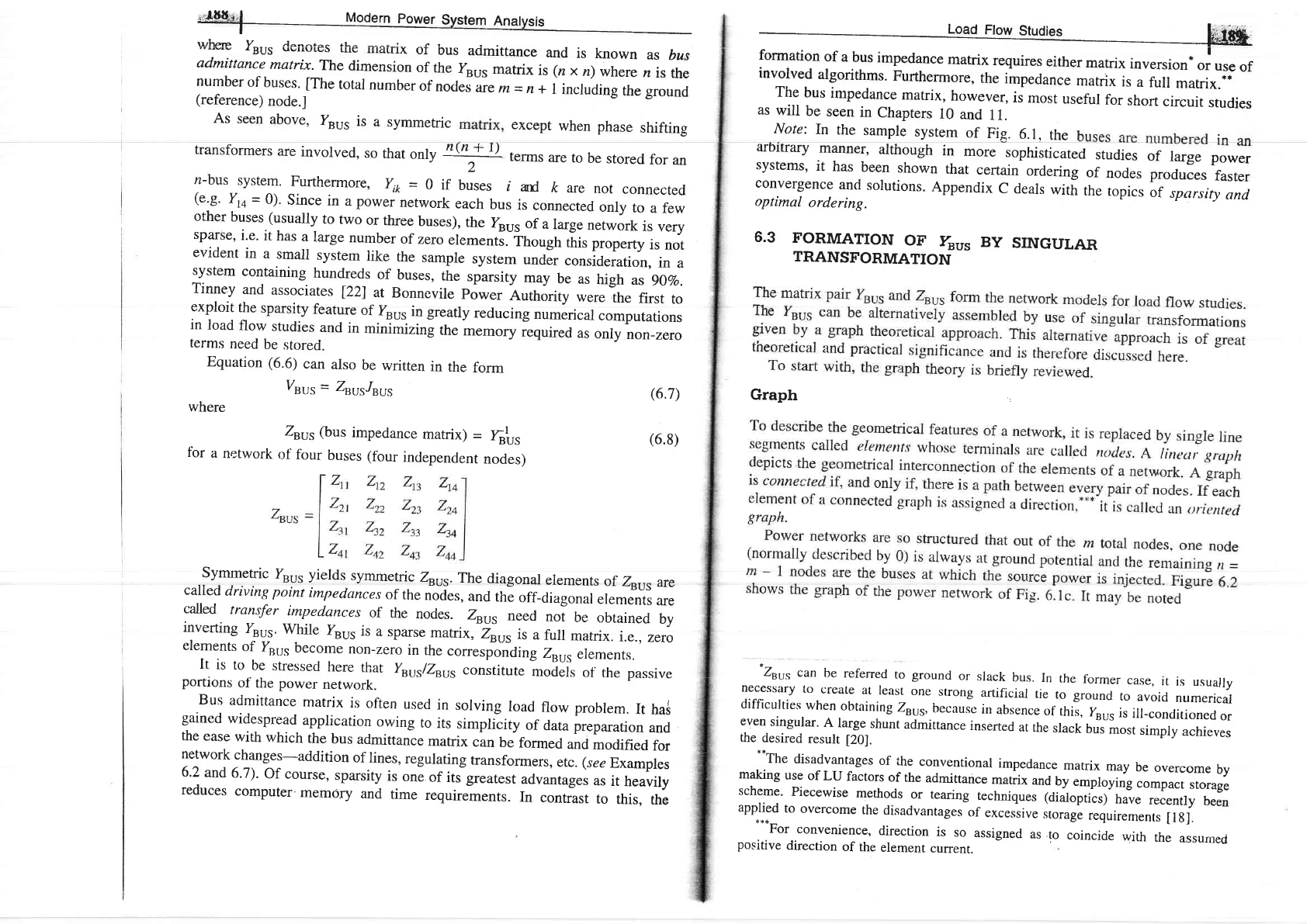
Fig.
6.2
Linear
graph
of the
circuit
in Fig.
6.1c
here
that
each
source
and
the
shunt
admittance
connected
across
it
are
represented
by
a single
element.
In
fact,
this
combination
represents
the
most
general
network
element
and
is
described
under
the
subheading
"primitive
Network".
A
connected
s'bgraph
containing
all
the
nodes
of
a
graph
but
having
no
closed
paths
is
called
a tree.
The
elements
of a
tree
are called
branches
or ffee
branches.
The
number
of branches
b
that
form
a
tree
are given
by
b=m
*
1-
n
(numberof
buses)
(6.9)
Those
elements
of
the
graph
that
are
not
included
in
the
tree
are
called
links
(or
link
branches)
and
they
form
a
subgraph,
not
necessarily
connected,
called
-
Branch
-
-
Link
e
=9
m=5
b=m-1=5-'l=4=n
l=e-b=5
@
(a)
Tree
(b)
Co- tree
Fig.
6.3 Tree
and
cotree
of the
oriented
connected graph
of Fig.
6.2
cotree.
The number
of links
/
of
a connected
graph
with
e
elements
is
I=e-b=e-m+l
Note
that
a tree
(and
therefbre,
cotree)
of
a
graph
is
not
unique.
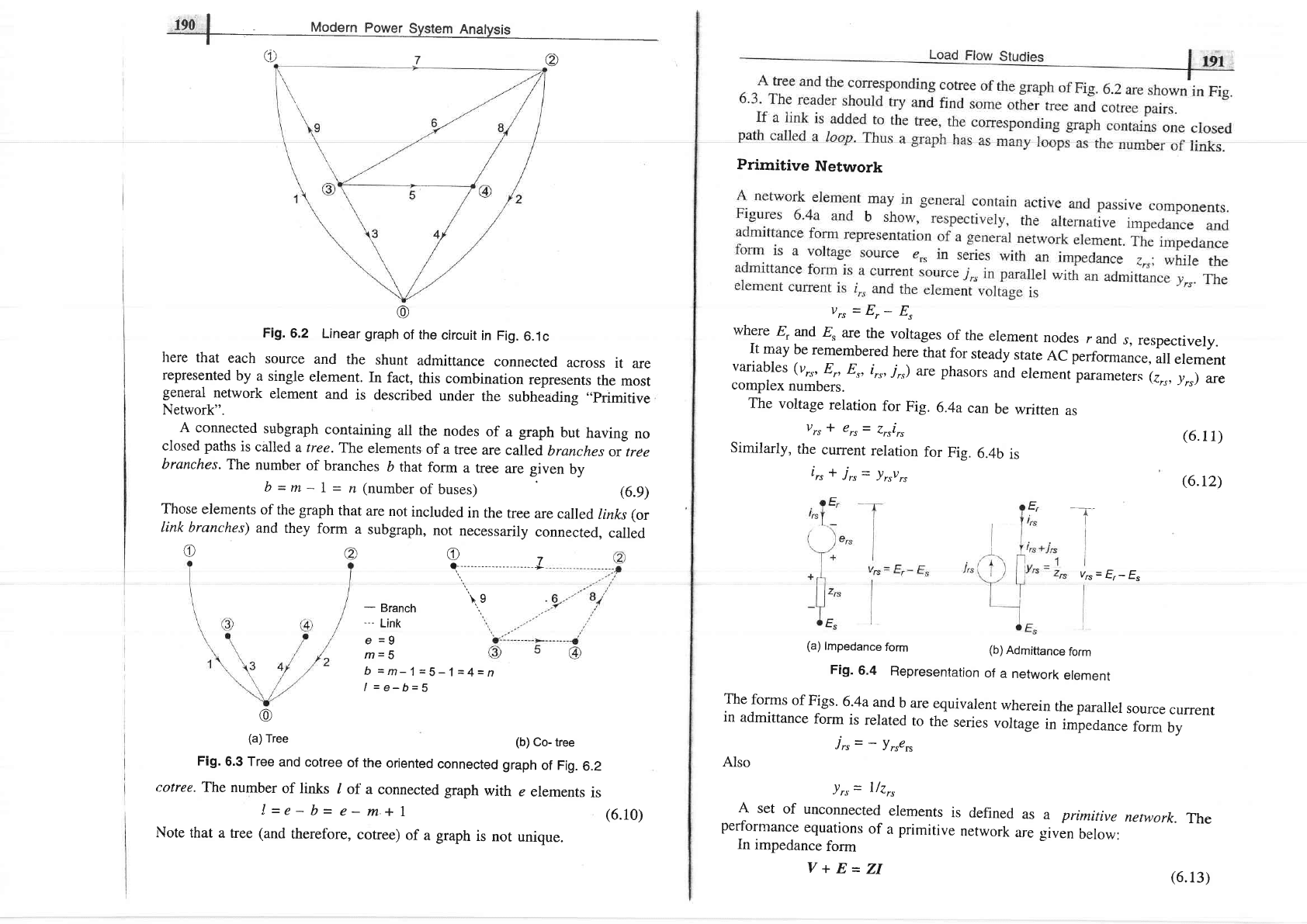
Primitive
Network
vr,
=
Er-
E,
where
E,
and
E"
are
the
voltages
of
the
element
nodes
r
and
s,
respectively.
It
may
be
remembered
here
that
for
steady
state
AC performan..,
ull
element
variables
(vr*
E,
8",
irr,7r.,)
are phasors
and
element
parameters
(zrr,
.rr")
ar€
complex
numbers.
The
voltage
relation
for
Fig.
6.4a
can
be
written
as
vrr*
€rr=
Zrri^
Similarly,
the
current
relation
for
Fig.
6.4b
is
ir,
*
jr, =
lrrv^
(a)
lmpedance
form
(b)
Admittance
form
(6.11)
(6.r2)
rn
v7
o-------------
- --------+
\.e
@
c
!r.,=
|/7r,
A
set
of
unconnected
elements
is
defined
as
performance
equations
of
a primitive
network
erre
In
impedance
form
I
yr"=E
-E"
a primitive
network.
The
given
below:
Fig.
6.4
Representation
of
a
network
element
The
forms
of
Figs.
6.4a
and,
b
are
equivalent
wherein
the
parallel
source
currenr
in
admittance
form
is
related
to
the
series
voltage
in
impedance
form
by
Jr,=
-
Yrs€rs
Also
(6.10)
V+E=ZI
(6.13)
'f{W';l
Modern
Power
svstem Anatvsis
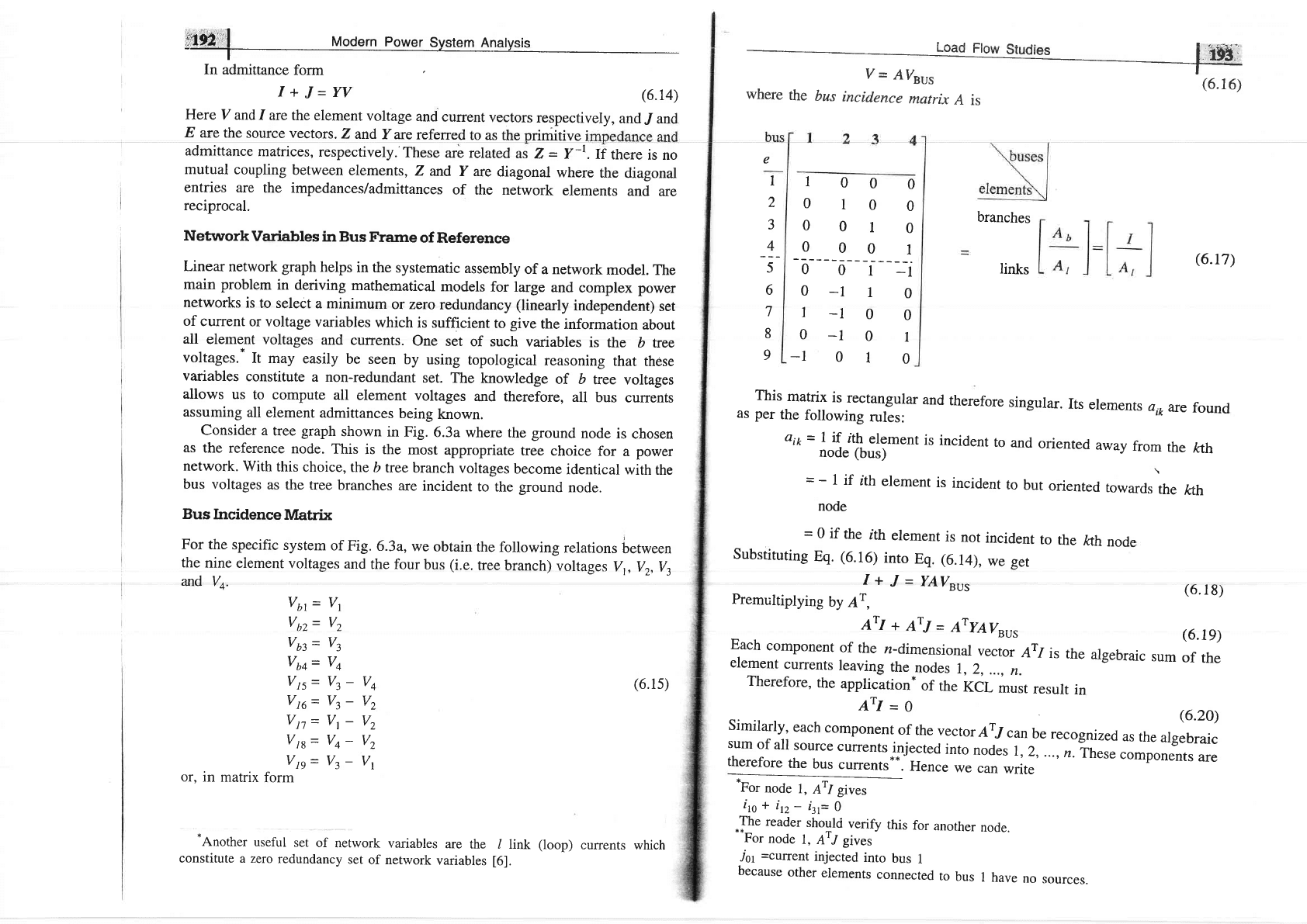
In
admittance
form
I+J=W
(6.14)
Load
Fiow
Stucjies
i
flH:
<
v
=
AV,'J'
I
(6.16)
where
the
bus
incidence
matrix
A
is
Here
V and.I
are
the element
voltage
and
current
vectors
respectively,
and
rl
and
E
are the
source vectors.
z and
Y are
referred
to as
the
primitive
i
admittance
matrices,
respectively.'These
are
related
as
Z
=
Y-r.If
there
is no
mutual
coupling
between
elements,
Z
and
Y are
diagonal
where
the
diagonal
entries
are
the
impedances/admittances
of
the network
elements
and
are
reciprocal.
NeturorkVariables
in Bus
Frame
of Reference
Linear
network graph
helps
in the
systematic
assembly
of a network
model.
The
main
problem
in
deriving
mathematical
models
for large
and
complex power
networks
is
to select
a
minimum
or zero
redundancy (linearly
independent)
set
of
current
or voltage
variables
which
is sufficient
to
give
the
information
about
all
element
voltages
and
currents.
One
set
of such
variables
is
the
b tree
voltages.*
It
may easily
be seen
by
using
topological
reasoning
that
these
variables
constitute
a non-redundant
set. The
knowledge
of b
tree
voltages
allows
us
to compute
all
element
voltages
and therefore,
all
bus
currents
assuming
all element
admittances
being
known.
Consider
a
tree
graph
shown
in
Fig.
6.3a where
the ground
node
is
chosen
as
the reference
node.
This
is the
most
appropriate
tree
choice
for
a
power
network.
With
this
choice,
the
b
tree
branch
voltages
become
identical
with
the
bus voltages
as
the tree
branches
are
incident
to
the
ground
node.
Bus
Incidence
Matrix
For
the
specific
system
of Fig.
6.3a,
we
obtain
the
following
relations
tetween
the
nine
element voltages
and
the four
bus
(i.e.
tree
branch)
voltages
V1,
V2, V3
and Va.
Vut
=
Vt
Vtz=
Vz
Vut
=
Vt
Vuq=
Vq
Vts=
Vt-
Vta=
Vt
-
Vn=Vt-
Vts=
Vq-
Vtg=
Vt-
or,
in matrix
form
*Another
useful
set
of
network
variables
are
the
/ link
(loop)
currents which
constitute
a zero
redundancy
set
of network
variables
[6].
1000
0100
0010
0001
001_l
0-l
10
l-l
00
0-1
01
-l
010
This
matrix
is
rectangular
and
therefore
singular.
as per
the
following
rules:
e
I
2
3
4
)
6
7
branches
links
8
9
(6.r7)
Its
elements
a,oare
found
and
oriented
away
from
the
ftth
to
but
oriented
towards
the
ftth
aik
=
1 if
tth
element
is
incident
to
node (bus)
=
-
|
if
tth
element
is
incident
node
=
0 if
the
ith
element
is
not
incident
to
the
kth
node
Substituting
Eq.
(6.16)
into
Eq. (6.14),
we
get
I+J=yAVsu5
Premultiplying
by
Ar,
ArI+ArJ=AryAV"u,
F,ach
component
of
the
n-dimensional
vector
ATI
is
the
element
currents
leaving
the
nodes
7,2,
...,
n.
Therefore,
the
application*
of
the
KCL
must
result
in
ArI
=o
(6.20)
Similarly,
each
component
of
the
vector
ATJ
"unbe
recognized
as
the
algebraic
sum
of
all
source
currentsinjected
into
nodes
r,2,
...,n.
These
components
are
therefore
the
bus
currents**.
Hence
we
can
write
*For
node
l,
Arl gives
iro
+
ir,
-
l:r=
0
-The
reader
shoulci
verify
this
for
another
node.
**For
node
l,
AT"/ gives
j61
=current
injected
into
bus
1
because
other
elements
connected
to
bus
t
have
no
sources.
(6.
l8)
(6.1e)
algebraic
sum
of
the
Vn
v2
v2
v2
vr
(6.15)
i,il9:4iitl
Modern
Power Svstem Analvsis
- .
-
J
- ---- - -"--'f
---
I
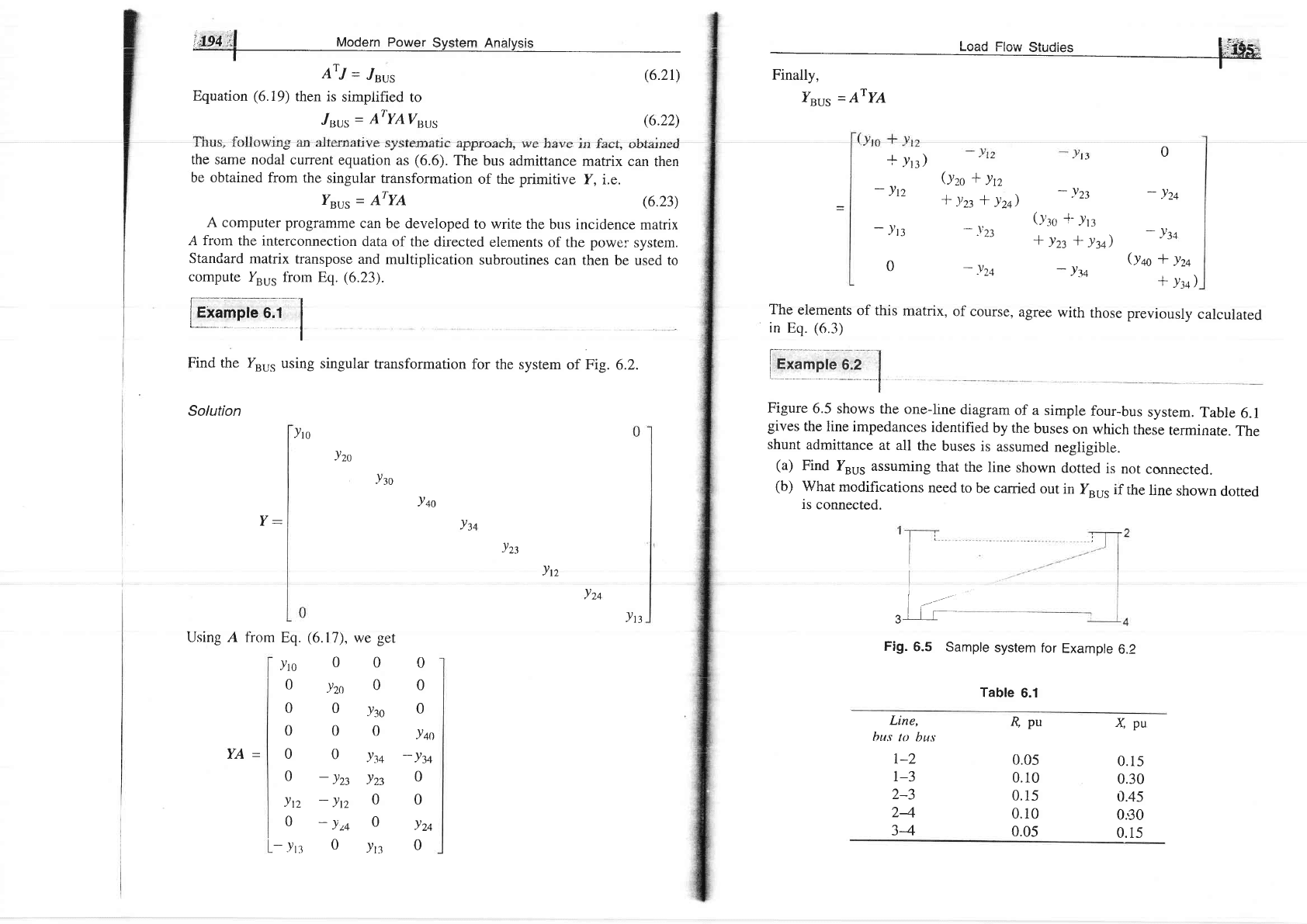
ArJ
=
Jsus
Equation
(6.19)
then is
simplified
to
,/eus
=
ATYAV",,,,
--J---.^^_-.--rr^'vrrrrgvl'va
the same nodal
current
equation
as
(6.6).
The
bus admittance
matrix can
then
be obtained
from the
singular
transformation
of the
primitive
Y, i.e.
Yeus
=
ATYA
Load
Flow
Studies
I ftt^
I
v
-
lTv,r
rBUS
=
A IA
(6.2r)
(6.22)
(6.23)
0
-
!'tn
A
computer programme
can
be developed
to
write the
bus incidence
matrix
A
from
the
interconnection
data of
the directed
elements
of the
power
systetn.
Standard matrix
transpose
and multiplication
subroutines
can
then be used to
compute
Yu*
fiorn Eq.
(6.23).
*"*'^-"r
,
Example
6.1
|
I
Find the
Y6u"
using singular
transformation
for the
system
of
Fig.
6.2.
Solution
Y-
Using A fiom
*
yr:)
(yzo
*
yn
-
Jtz
*
lzt
*
t-zq,
-
lzt
-
)r:
,.
()'lo
f-
.yr
'-
.t'23
*
lzt
*
Jy,
-
}'l
0
_!zc
The
elements
of this
matrix,
of course,
agree
with
those
previously
calculated
in
Eq.
(6.3)
)ro
Figure
6.5
shows the
one-line
diagram
of
a simple
four-bus
system.
Table
6.1
gives
the
line impedances
identified
by
the
buses
on which
these
terminate.
The
shunt
admittance
at all
the
buses
is
assumed
negligible.
(a)
Find
Yuu.
assuming
that
the
line
shown
dotted
is
not
connected.
(b)
What
modifications
need
to
be carried
out
in
Yuu,
if
the
line
shown
dotted
is
connected.
Fig.
6.5
Sample
system
for
Example
6.2
Table
6.1
!zo
-Vro
!qo
ltn
v-,
JZ)
!n
Y.-n
ln
IJ1'
3
Eq.
)ro
0
0
0
0
0
!n
0
-.Yrr
0
0
0
jqo
-
ft+
0
0
lzq
0
&pu
0.05
0.10
0.15
0.10
0.05
xpu
0.15
0.30
0.45
0.E0
0.15
(6.17),
we
get
00
lzo
0
0Jn
00
0ly
-
jzz
lzz
-lrz
0
-
!24
0
0ln
Line,
bus
to bus
t-2
1-3
2-3
24
34
YA=
trrrr.F,b"iFl
'f|/0.!:l
Modern
Power
Svstem Anatvcis
-t
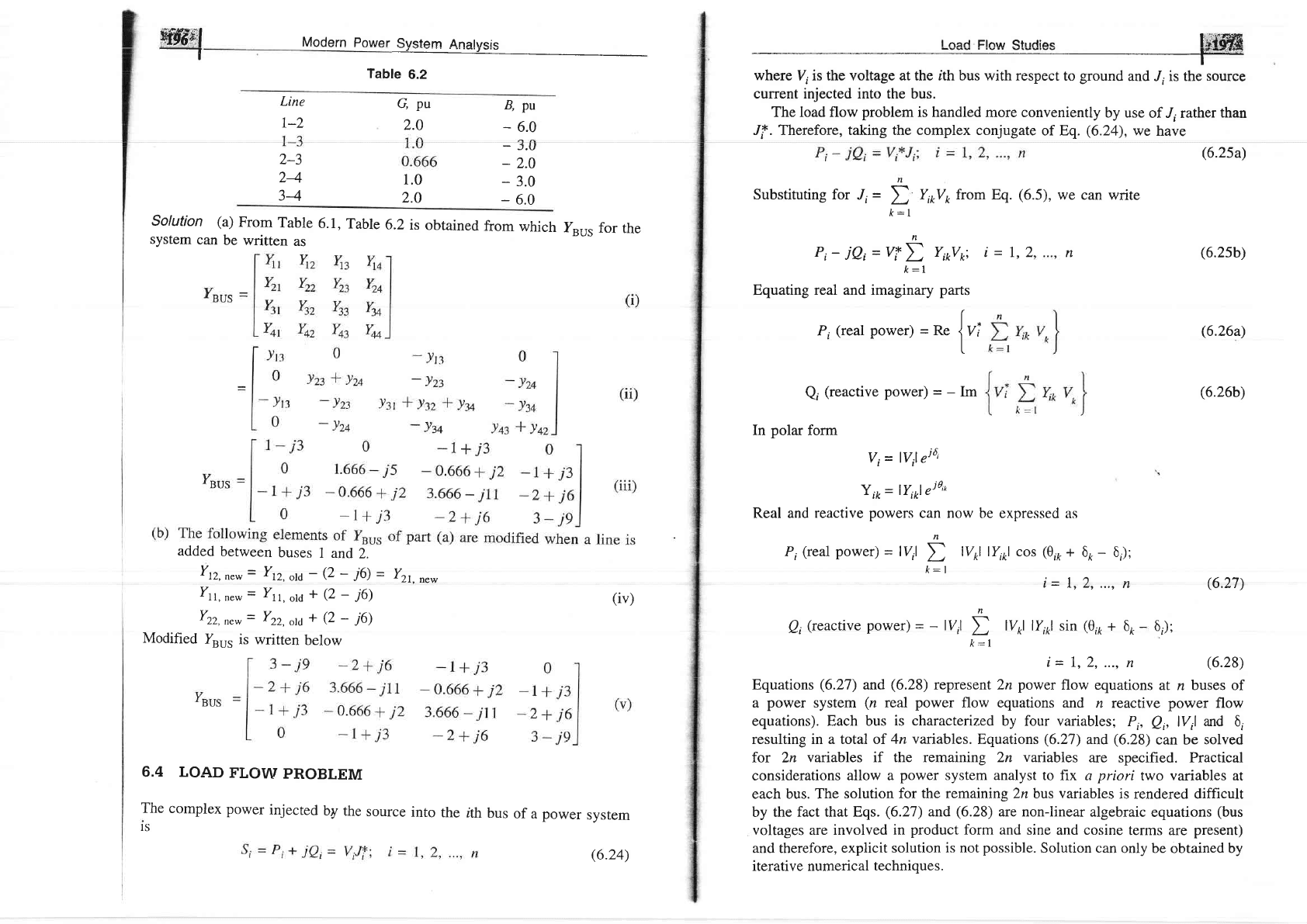
Table
6.2
f.siffi
where
V, is the voltage at the ith bus with
respect to
ground
and
,/,
is the
source
current injected into the bus.
The load flow
problem
is handled
more conveniently
by use
of
"/,
rather
than
,I,t. Therefore, taking the complex conjugate
of Eq.
(6.24),
we
have
(6.25a)
Substituting for
J,
=
Y*Vr from
Eq.
(6.5),
we can write
Line
r-2
Gpu
2.0
1.0
2.0
B,pu
-
6.0
-
J.\,
-
2.0
-
3.0
-
6.0
2-3
24
34
t
k:l
solution (a)
From
Table
6.1,
Table
6.2
is
obtained
from
which
yuu,
for
the
system
can
be written
as
added
between
buses
7 and
2.
Ytz,
n"*
=
Yrz,
on
-
(2
-
j6) =
Yzr.
o"*
Xrr,
n"*
=
ytt,ora
+
(2
-
j6)
(iv)
Y2z,
n"*
=
Yzz,
ot,t
+
(2
-
j6)
Modified
Y"u,
is
written
below
6.4 LOAD
FLOW
PROBLEM
The
complex
power
injected
by
the
source
into
the
ith
bus
of
a
power
sysrem
IS
Qi
(reactive
power)
=
-
Irn
In
polar
form
V;
=
ll/,1si6t
Y
r*
=
lY'ol eio'r
Real and reactive
powers
can now be expressed
as
n
P,
(real
power)
=
lvil
D
lvkl lYikl cos
(0,0
+
k:l
i= r,
A
Pi-
jQi=Vf
L
Yil,Vpi
k:l
Equating real and imaginary
parts
I
P;
(real
power)
=
Re
]Vi
t
i=l2 n
(6.2sb)
(6.26a)
(6.26b)
(6.27)
6,);
(6.28)
6t
-
6');
2,
..., fl
Qi Qeactive
power)
-
-
lvil
D
lvkl lYikl sin
(e,1
+
6t
-
k:l
i=1,2,...,fl
Equations
(6.27)
and
(6.28)
represent 2n
power
flow equations
at
n
buses
of
a
power
system
(n
real
power
flow equations and
n reactive
power
flow
equations). Each bus is
characterized
by four variables;
P;,
Qi,
l7,l
and
6i
resulting in a total of
4n variables.
Equations
(6.27)
and
(6.28)
can be
solved
for 2n
variables
if
the remaining 2n
variables
are specified. Practical
considerations
allow a
power
system analyst
to fix a
priori
two
variables
at
each bus. The
solution for
the remaining
2n bus variables
is rendered difficult
by the fact
that Eqs.
(6.27)
and
(6.28)
are non-linear
algebraic
equations
(bus
voltages
are
involved in
product
form and
sine and cosine
terms are
present)
and therefore,
explicit solution
is not
possible.
Solution can
only be
obtained
by
iterative numerical
techniques.
(6.24)
:flg.,0iil
toaern
power
system
Anatvsis
Depending
upon
which
two
variables
are
specified
a
priori,
the
buses
are
classified
into
three
categories.
(I)
PQ
Bus
r rr
rrrro
rJyw
vr
LruD,
Lrrc
ucr
puwers
ri
ano
ai
arc
known
(po,
and
Qpi
arc
known
l."l 1:1t"t:i:.t"
g
ancl
p,
and
egile
specified).
The
*tnn*i,
ars
f
l/,t
and
6,. A
pure
load
bus
(no
generating
f*ifty-at
the
bus,
i.e.,
pcr=
eci=0)
is
a
Pp
bus.
(2)
PV
Bus/Generator
Bus/voltagre
controlled
Bus
At this
type
of
bus
P'
and
eo,
are
known
a
priori
and
rv,r
and.
p,(hence
p6;)
are
specified.
The
unknowns
are
e,
(hence
eo,)
and
6,.
'
'
\
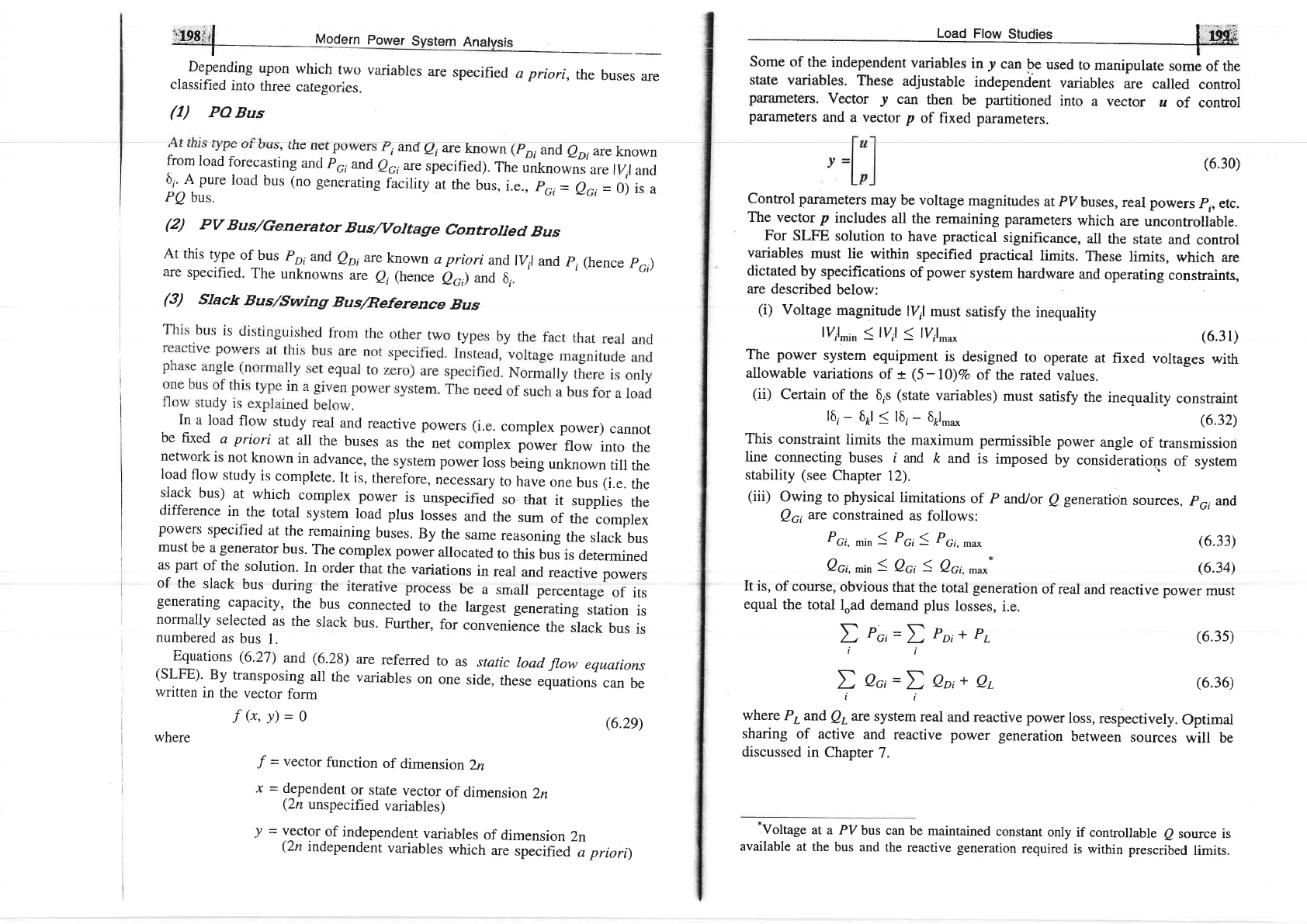
(3)
Slack
Bus/Swing
Bus/Reference
Bus
state
variables.
These
adjustable
independent
variables
are
called
control
parameters.
Vector
J
can
then
be
partitioned
into
a
vector
u
of
confrol
parameters
and
a vector p
of fixed parameters.
In
a
load
flow
study
real
and
reactive
powers
(i.e.
complex
power)
cannot
be fixed
a priori
at
alr
the
buses
as
the
net
complex
power
flow
into
the
network
is
not
known
in
advance,
the
system
power
loss
being
unknown
till
the
load
flow
study
is
complete.
It
is,
therefore,
n.."rrury
to
have
one
bus
(i.e.
the
slack
bus)
at
which
complex
power
is unspecified
so
that
it
supplies
the
difference
in
the
total
system
load
plus
losses
and
the
sum
of
the
complex
powers
specified
at
the
rcrnaining
buses.
By
the
same
reasoning
the
slack
bus
must
be
a
generator
bus.
The
complex
power
allocated
to
this
bus
is
determined
as
part
of
the
solution.
In
order
that
the
variations
in
real
and
reactive
powers
of the
slack
bus
during
the
iterative
process
be
a
snrall
percentage
of
its
generating
capacity,
the
bus
connectecl
to
the
largest
generating
station
is
normally
selected
as
the
slack
bus.
Further,
for
corivenience
the
slack
bus
is
numbered
as
bus
1.
Equations (6.27)
and
(6.28)
are
referred
to
as
stutic
load
ftow
equations
(SLFE)'
By
transposing
all
the
variables
on
one
side.
these
equations
can
be
written
in
the
vector
form
f(x,y)-o
,f
=
vector
function
of
dimension
2n
x
=
d_ependent
or
state
vector
of
dimen
sion
2n
(2n
unspecified
variables)
Control parameters
may
be voltage
magnitudes
at
pV
buses,
real powers
p,,
etc.
The
vector p
includes
all the
remaining
parameters
which
are
uncontrollable.
For SLFE
solution
to
have
practical
significance,
all
the
state
and
control
variables
must
lie within
specified practical
limits.
These
limits,
which are
dictated
by
specifications
of
power
system
hardware
and
operating
constraints,
are
described
below:
(i)
Voltage
magnirude
lV,l
must
satisfy
the
inequality
lv,l^tn
<
lvil
(
lv,l_*
(6.31)
The
power
system
equipment
is
designed
to
operate
at
fixed
voltages
with
allowable
variations
of t
(5
-
l})Vo
of
the
rated
values.
(ii)
Certain
of the
6,s
(state
variables)
must
satisfy
the
inequality
constraint
16,-
6ft1
S
l6i-
6rln,o
(6.32)
This
constraint
limits
the
maximum permissible
power
angle
of transmission
line connecting
buses
i and
ft and
is
imposed
by
considerations
of
system
stability
(see
Chapter
12).
\
-
(iii)
owing
to
physical
limitations
of
p
and/or
e
generation
sources,
po,
and
Qci
Ne
constrained
as
follows:
(6.30)
(6.33)
(6.34)
(6.35)
(6.36)
Pc,,
^in
1
Pc,
S
Pc,.
,n*
Qci,
^rn
1
Qci S
Qc,,
^u**
(6.2e)
It
is, of
course,
obvious
that
the
total
generation
of real
and
reactive
power
must
equal
the
total
load demand plus
losses,
i.e.
D
Po,=t
Po,+
P,
lt
D
Qci=l
Qot+
Qr
ii
where
Ptand
Qpare
system
real
and
reactive power
loss,
respectively.
Optimal
sharing
of active
and reactive
power
generation
between
sources
will be
discussed
in
Chapter
7.
-Voltage
ata
PV
bus can
be
maintained
constant
only
if conrollable
esource
is
available at
the bus
and
the
reactive generation
required
is within
prescribed
limits.
where
)
=
vector
of
independent
variables
of
dimension
2n
(2n
independent
variabres
which
are
specified.
i prrori)
ffi#ilfl,.l.i|
Mod".n
Po*"t
sv"ttt
An"lvtit
I
"Ihe
load
flow
problem
can
now
be
fully
defined
as follows:
Assume
a
certain
nominal
bus
load
configuration.
Specify
P6i+
iQci
at all
the
pQbuses
(this
specifies
P,
+
iQi
at
these
buses);
specify
Pcr
(this
specifies
P,)
and
lV,l
at all
the
PV buses.
Also
specify
lVll
and
6,
(=
0)
at the
slack
bus'
T.L,,- r- .,--iolrlac nf thp rrer-fnr u ere snecifie.d The 2n SLFE can now be
solved
(iteratively)
to
determine
the
values
of
the
2n
vanables
of
the
vector
x
comprising
voltages
and
angles
at the
PQ buses,
reactive
powers and
angles
at
fhe
pV
buses
and
active
and
reactive
powers
at the
slack
bus.
The
next
logical
step
is
to
comPute
line
flows.'
So
far
we have
presented,
the
methods
of assembling
a Yeus
matrix
and
load
flow
equations
and
have
defined
the
load
flow
problern
in its
genpral form
with
definitions
of
various
types
of
buses.
It
has been
demonstrated
that
load
flow
equations,
being
essentially
non-linear
algebraic
equations,
have
to be
solved
through
iterative
numerical
techniques.
Section
6.5
presents
some
of the
algorithms
which
are
used
for
load
flow
solutions
of
acceptable
accuracy
for
systems
of
practical
size.
At
the
cost
of
solution
accuracy,
it is
possible
to linearize
load flo-w
equations
by
making
suitable
assumptions
and
approximations
so
that
f'ast
and
eiplicit
solutions
become
possible.
Such
techniques
have
value
particularly for
planning
studies,
where
load
flow
solutions
have
to
be carried
out
repeatedly
but
a
high
degree
of
accuracy
is not
needed.
An
Approximate
Load
Flow
Solution
Let
us
make
the
following
assumptions
and
approximations
in the
load
flow
Eqs.
(6.27)
and
(6.28).
'
(i) Line
resistances
being
smaii
are
rreglecie,C
(shiint conductance
of overhead
lines
is always
negligible),
i.e.
P7,
the
active
power loss
of
the system
is
zero.
Thus
in
Eqs.
(6'21)
and
(6.28)
1it
=
90'
and
1ii
-
-
90o
'
(ii)
(6,
-
6r)
is small
(<
r/6)
so
that
sin
(6,
-
6o)
=
(6r
-
6r).
This
is
justified
from
considerations
of
stability
(see
Chapter
72)'
(iii) AII
buses
other
than
the
slack
bus
(numbered
as
bus
1) are
PV
buses,
i.e.
voltage
magnitucles
at
all the
buses
including
the
slack
bus
are
specified.
Equations
(6.27)
and
(6.28)
then
reduce
to
Pi
=lVil
lvkl
lYikl
(6i
-
6r);
i
=
2,3,
...,
n
(6.37)
n
et=-
'u,'
E
rvkrlyikr
cos
(6,-
6u)
+rv,r2
ry,,r;
i
=
r,2,...,
n
(6.39)
Since
lv,ls
are
specified,
Eq.
(6.37)
represents
a set
of
linear
algebraic
equationi
in 6,s
r,vhich
are
(n
-
l)
in
number
as
6,
is
specified
at the
slack
bus
(6,
=
0).
The
nth
equation
corresponding
to
slack
bus
(n
=
l)
is
redundant
as
the
reat
power
injected
at this
bus
is now
fully
specified
as
Wffi
nn
Pr
=
.I
Po,-
D
Po,; (Pr=
0).
Equations
(6.37)
can
be
solved
explicirly
i:2
i:2
(non-iteratively)
for
62,
61,
...,
d,
which,
when
substituted
in
Eq.
(6.3g),
yields
madehaveo..ouiLii*i;:;ffi
,"(;:;'iLT,",",T:,:T:J"#il-,1',T,7
simultaneously
but
can
be
solved
sequentially
[solution
of
Eq.
(6.3g)
follows
immediately
upon
simurtaneous
sorution
of
Eq.
(6.37)).
Since
the
sorution
is
non-iterative
and
the
dimension
is
retlucecr
to
(rr-l)
from
Zrt,
it
is
computationally
highly
economical.
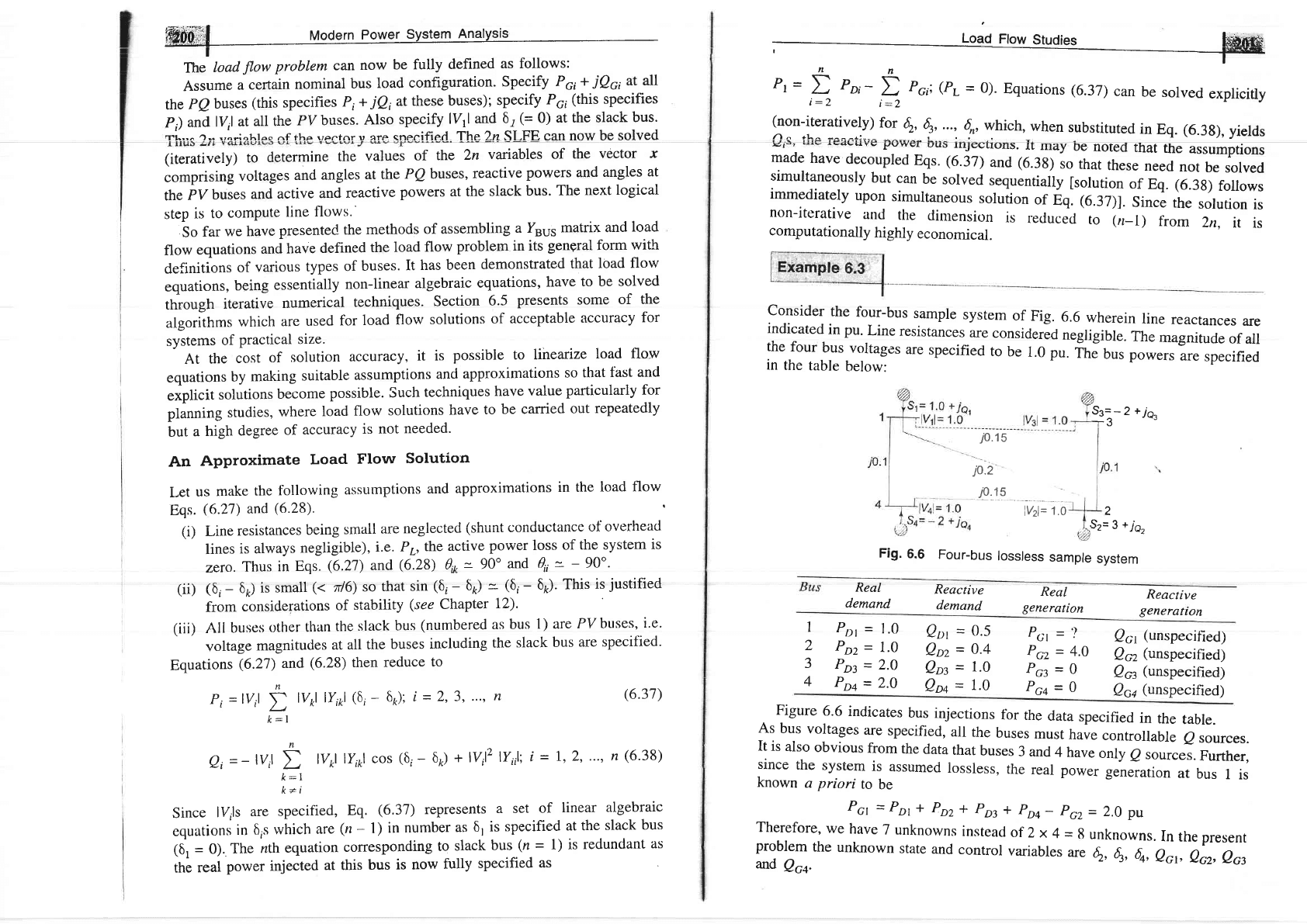
consider
the
four-bus
sample
system
of
Fig.
6.6
wherein
line
reactances
are
indicated
in pu.
Line
resistances
are
considerld
negligible.
The
magnitude
of
all
the
four
bus
vortages
are
specified
to
be
r.0 pu.
itJuu,
powersLe
specified
in
the
table
below:
53=-
2
+7O,
--r
J
j0.15
jo.2
iP,ts
lVzl=
'l.o
.S.= I + i^
,,-.
-
I
Uz
Fig.
6.6
Four-bus
lossless
sample
system
2
Real
demand
Reactive
demand
Real
generation
Reactive
generatrcn
1
2
3
4
Por
=
1.0
Qot
=
0.5
Poz
=
7.0
Qoz
=
0.4
Poz
=
2.0
Qoz
=
1.0
Poq
=
2.0
Qoq
=
7.0
061
(unspecified)
Q62
(unspecified)
O63
(unspecified)
06a
(unspecified)
Pcl
='-
Pcz
=
4'0
Pct=o
Pcq=o
n
\-
,/--r
k:1
Figure
6.6
indicates
bus
injections
fbr
the
data
specified
in
the
table.
As
bus
voltages
are
specified,
all
the
buses
must
have
controllable
e
sources.
Il_r::t::
"_bviyus
from
the
data
rhar
buses
3
and
4
have
onry
e
sources.
Further,
slnce
ffie
system
is
assumeci
lossless,
the
real
power
generation
at
bus
I
is
known
a
priori
to
be
Pct
=
Por
*
Poz
*
pot
*
poo_
pcz
=
2.0
pu
Therefore,
we
have
7
unknowns
instead
of
2
x
4
=
8
unknowns.
In
the
present
problem
the
unknown
state
and
control
variables
are
{,
e,
60,
ect,
ecz,
ecz
and
Qc+.
Using
the
above
Y"u,
and bus
powers
as shown in Fig. 6.6, approximate
load
flow Eqs.
(6.37)
are
expressed
as
(all
voltage
magnitudes
are equal to 1.0
pu)
'yili.\
Modern Power System Analysis
I
Though the
reali63ses
are
zero, the
presence
of the reactive losses requires
that
the total reactive
generation
must be more than the total
reactive demand
(2.9
pu).
From the data
given,
Yru5 can be written as follows:
44
er=D
eo,-
D
epi
_
r.+r+
_
L,>
=
u.JJ4 pu
(viii)
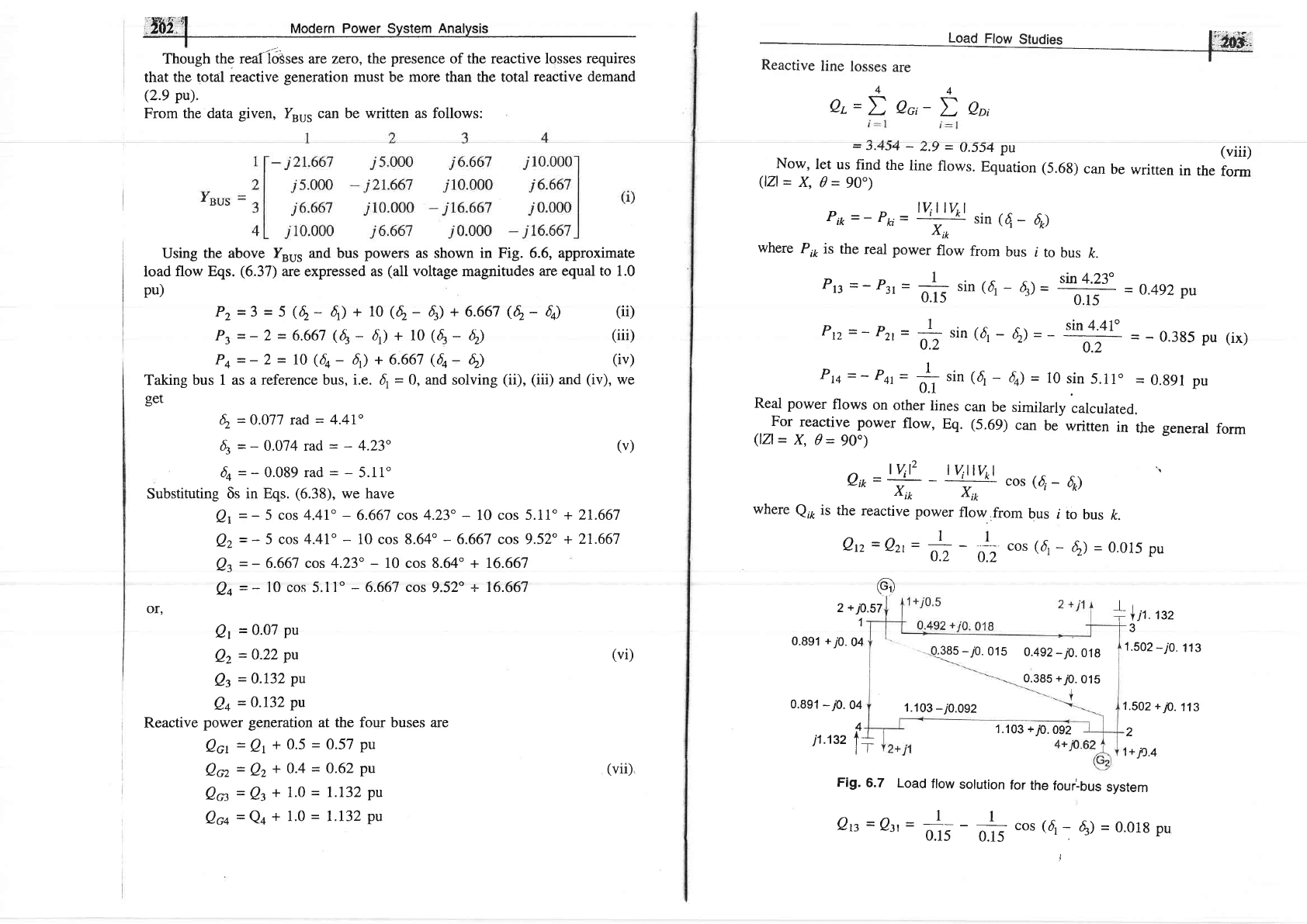
Now,
let
us
find
the
line
flows.
Equation
(5.6g)
can
be
written
in
the
form
(lzl=
X,0=90")
2
+ j0.ET
1
3
0.891
+/O.
04
0.891
-7O.
04
,385
-70.
015
0.492
-70.
018
0.385
+,p.
01S
1.s02
-i0.
113
1.502
+
10.
113
2
t,
jD.4
1.103
-
j0.0s2
4
1.103
+p.
092
Pz= 3
=
5
(6-
6)
+ 10
(6-
4)
+
6.667
(6-
6q)
Pt
=-
2
-
6.667
(6-
4)
+ l0
(4
-
6)
P+=-2- 10(4-
4)
+6.667
(6q:6)
Pik
=
-
Pki
-
lvi]-lvkl
sin
({
-
6o)
x,o
where
P*
is
the
real
power
flow
from
bus
j
to
bus
k.
pn
=
-
pz,
=
+
sin
(d,
-
q)-
sin-1.23"
=
0.492
pu
0.15
\r
-r/
0.1:
Ptz
=
-
Pzr
=
-1-
sin
(4
-
6)
=
- $n
4'41o
L'L
0.2
02
=
-
0'385
Pu
(ix)
Pru=-
Pqt=
+
sin
({
-
6o)
=
10
sin
5.11o
=
0.g91
pu
0.1
Real power
flows
on
other
lines
can
be
similarly
calculated.
For
reactive
power
flow,
Eq.
(5.69)
can
be
written
in
the general
form
(lZl=
X,0=90o)
ei*
=W
-
lvi-llvkl
cos
(,{
-
6o)
"
Xik
Xik
where
Q*
ir
the reactive
power
flow
from
bus
i
to
bus
ft.
Qp=Q,zr=+-
I
_1,
0.2
i.,
cos
(d,
_
hl
=
0.015
pu
@
*
l
i't
',t,
Taking
bus 1 as a reference bus,
i.".
4
=
0, and solving
(ii), (iii)
and
(iv),
we
get
4.
--O.0ll
rad
=
4.4I"
4=-0.074rad=-4.23'
(v)
6q=-0.089rad=-5.11'
Substituting 6s
in Eqs.
(6.38),
we have
Qr
=
-
5
cos 4.4I"
-
6.667 cos
4.23"
-
10
cos 5.11'
+
21.667
Qz
=
-
5 cos 4.41"
-
10 cos 8.64"
-
6.667 cos 9.52o
+ 21.667
Qz
=
-
6.667 cos 4.23o
-
10 cos 8.64' + 16.667
Qq
=
-
l0 cos 5.11"
-
6.667 cos
9.52o
+ 16.667
OI'
Qr
=
0'07
Pu
Qz
=
0'22
Pu
Qz
=
0'732
Pu
Q+
=
0.132
Pu
Reactive
power generation
at the four buses are
Qa
=
Qt
+ 0.5
=
0.57
pu
Qcz
=
Qz
+
0.4
=
0.62
ptr
Qa
=
Qs
+ 1.0
=
1.L32
pu
Qc+
=
Q+
+
1.0
=
1.132
pu
n:n
l|
Fig.
6.7
Load
flow
solution
for
the
four'-bus
system
Qrc
=
Qu
=
#
#
cos
(d1,
O
=
0.018
pu
I
(ii)
(iii
)
(iv)
(vi)
(vii),