Koren Y. The Global Manufacturing Revolution: Product-Process-Business Integration and Reconfigurable Systems
Подождите немного. Документ загружается.

The system in Figure 9.7 possesses four of the six core RMS characteristics:
Modularity—At the system level each CNC mac hine is a module.
Integrability—Machines at the same stage are integrated via cell gantries, which,
in turn, are integrated into a whole system by a conveyor, or spine gantries or
AGVs. (The circles in Figure 9.7 represent buffers.)
Scalability—It is easy to add machin es in each stage without interrupting the
system operation for long periods. From a system-balancing viewpoint scal-
ability starts at the stages that are already bottlenecks to reduction of system
cycle time.
Convertibility—It is easy to stop the operation of one CNC at a time and
reconfigure its functionality to the production of a new type of part.
Scalability and convertibility enhance the overall system performance. The system
in Figure 9.7, however, does not yet possess the two remaining char acteristics:
Customization (i.e., part family customized flexibility) and Diagnosability.
As we have said, implementing customized flexibility is critical to increasing
productivity. Introducing this characteristic into a reconfigurable system is key to
enhance productivity, but how exactly can it be accomplished? Is there a procedure
for implementing such a change in the system?
To begin with, let us assume that the milling tasks on the machined part can be
separated from the drilling and tapping tasks and that milling may be assigned to
different stages t han d rilling and tapping (i.e., performed in different stages in the
system). If this is done, we are able to integrate the type of RMTs depicted in
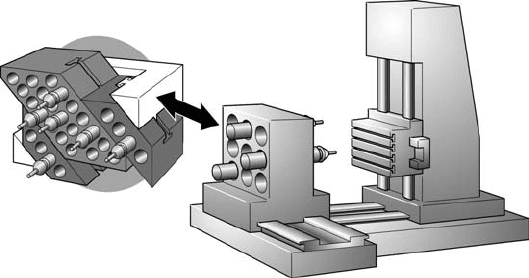
Figure 9.8 into the modified RMS configuration, shown in Figure 9.9. The RMT in
Figure 9.8 is capable of drilling (or tapping) multiple holes simult aneously. It can
drill some 10, 20, and even 50 hol es in a single stroke—a single motion of the Z-axis.
When the part is changed, the spindle head is reconfigured or changed out and
replaced.
Figure 9.8 A reconfigurable machine tool—RMT.
INTEGRATED RMS CONFIGURATIONS 241
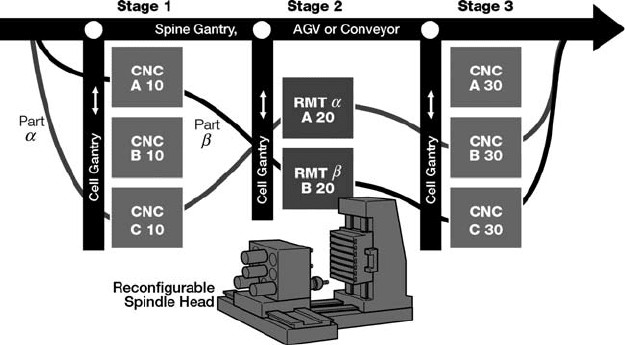
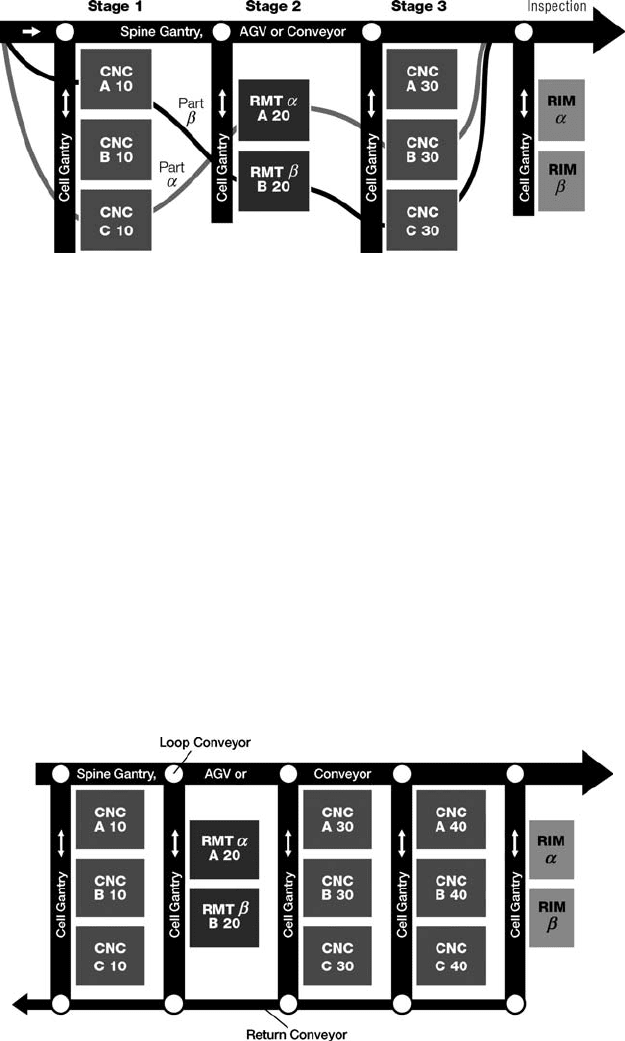
Figure 9.9 shows an RMS incorporating two specifically designed RMTs in
Stage 2. One RMT is capable of producing part a and the other RMT produces part
b, both parts at the same time. In a more sophisticated RMT, the spindle heads are on
a90
index table that rotates to fit the part entering for processing, and then there is
a need for only one RMT. The index-type spindle head can accommodate up to four
different parts and there is no need to employ multiple RMTs.
The configuration in Figure 9.9 possesses five core characteristics, including
customization; but how can it also have diagnosability? Diagnosability means that the
system has embedded in-process inspection resources, is able to monitor product
quality, and detect errors in real time.
To truly have the diagnosability characteristic, RIMs must be integrated into the
system in sequence with the part flow, such that they are part of the system
configuration, adding one more operation in the sequence. Performing in-proc ess
diagnostics has a double advantage: It dramatically shortens the ramp-up periods after
reconfigurations, and it allows rapid identification of part quality problems during
normal production.
An important issue is what happens if the RIM is down? The last thing that a plant
manager wants is for an inspection machine to stall production. The solution—install
the RIMs as a separate stage that allows the inspection to be conducted in a
contaminant-free environment and can be bypassed if necessary. This solu tion is
depicted in Figure 9 .10.
We have now a perfect RMS that possesses all six characteristics. But is this RMS
truly perfect? What happens to the bad parts that the RIM tagged to be sent back for
reprocessing? Or, what happens if, for example, CNCs B30 and C30 are both down? Is
there an alternative to reducing productivity to only 33% throughput in this case?
In order to improve the system responsiveness in these two cases, we can add a
return conveyor (or an AGV line, or a gantry) to move the parts backwards, as depicted
at the bottom of Figure 9.11. Bad parts can be sent for reprocessing at any stage. In the
Figure 9.9 RMS with integrated reconfigurable machine tools (RMT).
242
RECONFIGURABLE MANUFACTURING SYSTEMS
case of both CNCs in the third stage being down for an extended period of time,
CNC C10 can be reprogrammed to share the load. After the drilling operations at
Stage 2, the part can be sent back to CNC C10 to perform the tasks of Stage 3. We have
now the ideal RMS—very productive with in-process quality checks, and highly
responsive to both custom er’s needs and machine failures.
9.5 SYSTEM RAPID RAMP-UP
Reducing ramp-up time is critical for converting systems to respond to short windows
of opportunity for new products, as well as for scaling existing systems to cope with
changing demand. The Ramp-up period is defined as
Ramp-up Period: The period of time it takes a newly introduced system or reconfigured
manufacturing system to reach its designed, sustainable, long-term levels of production
in terms of both throughput and part quality.
Figure 9.11 Proposed RMS with integrated RMTs and RIMs and a backwards flow-path.
Figure 9.10 RMS with integrated RMTs and RIMs.
SYSTEM RAPID RAMP-UP 243
As production systems are made more reconfigurable, and their functionality and
layouts are modified more frequently, it becomes essential to rapidly tune the newly
reconfigured system so that it can quickly produce quality parts. The ramp-up process
includes embedded stations for dimension verification and diagnostic s of the finished
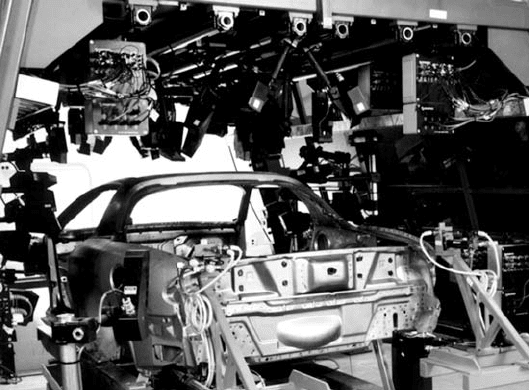
parts and products. An example of a measurement station in an auto-body assembly
line is shown in Figure 9.12. It is an array of laser triangulation sensors measuring
auto-body dimensions on the auto-body assembly line. The measurements are utilized
for subsequent error calibration and compensation.
The sensors in Figure 9.12 can detect faults and diagnose problems on the assembly
line such as a broken locator or incorrectly programmed robot. If these manufacturing
problems are not diagnosed and fixed, they can lead to problems in subsequent
assembly, and quality problems with the final product such as wind noise and water
leakage.
Rapid ramp-up of a manufacturing system after installation, and after each
reconfiguration, is essential to the success of the RMS paradigm. If ramp-up is not
done quickly, the reconfiguration advantage is lost. Therefore, reconfigurable systems
must be designed to include product quality measurement systems as an integral part
of the system (the diagnosability characteristic). Systematic methodologies for root-
cause analysis of part quality problems combined with rapid methods for on-line part
inspection are the key.
The basic engineering steps required are summarized in Figure 9.13. The
measurement step requires the selection of type and location of sensors (e.g., part
dimensions, axis position, cutting force). The diagnostics step matches that sensor
information to a stored model to identify errors and faults. The information is also
used to detect and diagnose machine or fixture geometric errors, operational variation,
Figure 9.12 Optical measurement of automotive body dimensions.
244
RECONFIGURABLE MANUFACTURING SYSTEMS
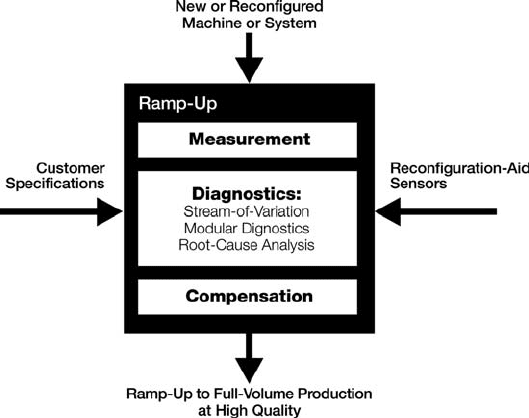
and tool breakage. Finally, the machines and processes are adjusted to reduce the
errors to the allowed tolerances—this is the compensation stage.
Diagnostic senso rs can be embedded at the machine level, and the information
sent to the system-level computers. Dimensi on inspection sensors may be also
integrated into the manufacturing system by adding measurement stations, such as
the RIM in Figure 9.10, and the lasers in Figure 9.12. The measurement system and
the diagnostic methodology should allow for machine and system diagnosability—
namely, identifying the sole cause or sourc e of a fault and not merely reporting the
errors. The compensation step, taken either automatically or through operator
intervention, performs corrective actions (e.g., calibration, adjusting operating
parameters, maintenance).
To guarantee a short ramp-up after each reconfiguration, it is necessary to measure
both product features and process variables quickly. The measurement system,
embedded in the RMS, must rapidly identify the sources of quality problems, and
advanced information technologies, statistics, and signal processing technologies
correct them in real time.
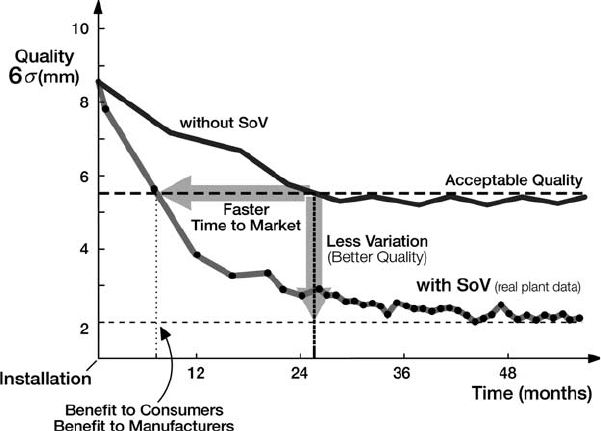
Real data points from actual production of auto-body assembly have been plotted
in Figure 9.14. This figure demonstrates the advantage of the systematic ramp-up
process described in Figure 9.13. The benefit is the rapid reduction of the variation
(6s) in critical body dimensions by the use of stream-of-variations
*
(SoV) meth-
odology.
9
SoV combines engineering process models with statistical analysis to
account for how product dimensional variations accumulate as the product moves
Figure 9.13 Ramp-up process.
*
The term “Stream of Variations” was coined by Y. Koren.
SYSTEM RAPID RAMP-UP 245
through a man ufacturing system. It can be used, with appropriately selected and
placed sensors, to diagnose the root causes of dimens ional errors in the production
system.
10
Applying SoV reduces the error (“variation”) more rapidly, 15 weeks sooner than
normal in this case, and more successfully, reducing auto-body variations from 5 to
2.2 mm. These improvements translate into a significant time-to-market advantage
with huge benefits to the manufacturer, and a better product for the consumer (for
example, doors that perfectly fit their opening, and trunks that close more accurately).
9.6 HEXAGONAL RMS CONFIGURATIONS
Below we describe a futuristic multi-stage flexibility manufacturing system, which
includes a low-cost material handling system and takes up less floor space than a
comparable conventional system. For a six-machine cell, the space is smaller by a
factor of approximately 1/2.
This new system is composed of hexagonal manufacturing cells, where each cell
contains several machines and typically represents an entire operational stage in the
system.
11
Typically all machines in the cell (i.e., at the stage level) are identical and
their number is calculat ed to meet the required production capac ity (i.e., volume)
of the system. Each cell contains up to six identical machines, with each machine
installed close to one of the hexagon sides, as depicted in Figure 9.15.
A cell may start with less than six machines; adding machines when needed allows
for scaling up the system capacity. Neighboring cells are installed on adjacent sides
Figure 9.14 Results showing ramp-up time reduction in automotive body assembly.
246
RECONFIGURABLE MANUFACTURING SYSTEMS

of the hexagon in such a way that a honeycomb structure is achi eved (see Figure 9.16).
This structure allows more connectivity while saving floor space. The gantry tracks
(on which the gantries move) of adjacent cells are installed close to each other along
the shared sides of the hexagon. The overhead gantry is the material transfer of choice
for the honeycomb configuration because it allows access to the machines for service
and maintenance.
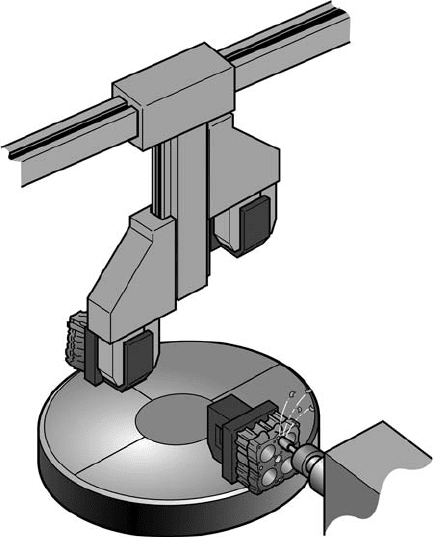
Each cell has an overhead gantry, equipped with a double gripper that moves along
the gantry’s hexagonal sides on an upper track and can approach each machine table in
the cell. The gantry performs all material handling operations in the cell. The unit has
two Z-axes that can move up and down, and each one of these has a gripper at its end, as
shown in Figure 9.17. The material handling unit approaches a machine table with one
gripper empty and the other holding a part that is ready to be loaded onto the machine.
First, the empty gripper is lowered to take the machined part from the machine rotary
table, and lifts it out of the way. Then the unit moves slightly along its track and the
second gripper, with the new part, is lowered and loads the part on the machine table
(this is the position depicted in Figure 9.17). The empty gripper then rises back up
and the unit moves away to bring the part that is on the right gripper to a buffer. During
all this time the machine continues to operate on a part. When the machining is
Figure 9.15 Hexagonal manufacturing cell.
Figure 9.16 Several cells (eight in this example) form a large manufacturing system.
HEXAGONAL RMS CONFIGURATIONS 247
completed, the table rotates 180
and has a new part to work on, and the finished part
waits to be picked up.
The rotary table is a 180
index table. The table carries the new part 180
to place it
in the workspace of the cutting tool, and the machine starts its operation. When the
operation is done, the table rotates 180
and again the part is swapped out for the next
part and is ready to be picked up by the gripper.
The gripper takes the newly machined part and moves it to a triangular loop
conveyor that is shared with the cell to which the part is transferred next. The conveyor
moves the part to the adjacent cell. The empty gripper returns to a position where it can
receive a new part that has to be machined in one of the machines of the original cell.
The hexagonal cell has the optimal shape in terms of floor space reduction and
enables smooth motions of the gantry. The regular polygon internal angle is
{180–360/n}. The maximum utilization of floor space happens when a regular
polygon with n sides (n > 4) satisfies the equation:
2 f180ð180360=nÞg ¼ 180360=n
This equation solves the problem: Given two identical regular polygons A and B
with one shared (comm on) side, what is the identical polygon (C) that will have one
Figure 9.17 The right gripper just picked a ready part and went up; the left gripper is now
placing a new part to be machined next.
248
RECONFIGURABLE MANUFACTURING SYSTEMS
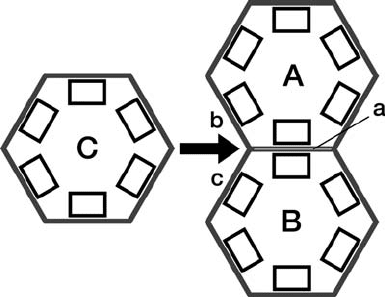
of its sides shared with one polygon (A), and another side shared with one of the sides
of the other polygon (B). This is depicted in Figure 9.18. The solution of this equation
is n ¼ 6. This proves that a manufacturing system composed of regular hexagonal cel ls
occupies the minimum floor space.
In addition to the smaller floor space that is achieved by the honeycomb
architecture, it has the advantage that new hexagonal cells can be easily integrated
into the existing honeycomb system. Integrating additional manufacturing cells scales
up the production capacity and functionality of the whole system.
The honeycomb structure has many potential applications in machining and
assembly systems. Personalized design of automobile interiors, as described in
Chapter 3, may generate many thousands of variants of auto interiors. The assembly
of each component requires specific tools, and may require different assembly times.
It is unfeasible to apply a traditional serial assembly line with so complex an assembly
program. It is also impractical to assume that personalized production can maintain
the pace of a typical line generating a throughput of one car every 50–60 seconds.
Floor space will also be a premium in personalize production with so many
components being offered.
If the new personalized production paradigm becomes a reality, Ford’s serial
moving assembly line (invented in 1913) must be replaced by a new approach. A new
conceptual system for final assembly of personalized auto interiors is depicted in
Figure 9.19. In this system, each small square represents a station where a particular
component is being assembled. Each car moves in a route that fits the combination of
components that have to be installed. Popular components will require more than one
assembly station.
Now, 100 years after the invention of the moving assembly line, and with enabling
advances in information technology, and under changing global imperatives, new
approaches to assembly need to be developed. We offer this new conceptual system,
and other non-serial assembly systems will certainly be developed in the future. In any
case, because of the unpredictable demands of the global manufacturing revolution
Figure 9.18 From all regular polygons with n > 4 only the hexagon (n ¼ 6) can fit
between two joint polygons, A and B, such that it has two shared sides b and c.
HEXAGONAL RMS CONFIGURATIONS 249
they all will need to be reconfigurable, enabling freely variable assembly routes to
produce the personalized product quickly and at low cost.
PROBLEMS
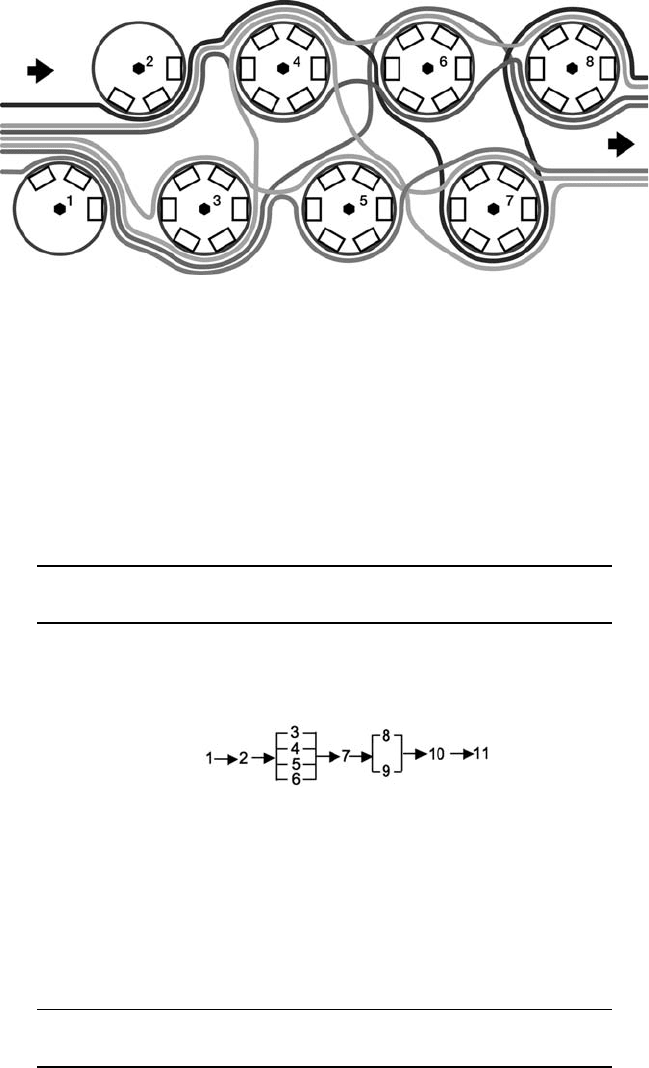
9.1 A part requires 11 operations to be completed. The processing times, in seconds,
are given in the table below.
1234567891011
20 40 20 15 20 10 30 55 20 20 30
The sequence in which the operations should be executed is given below.
(Namely, 3, 4, 5, and 6 can be done in any order after 2 and before 7, etc.)
The part is produced on the three-stage system in Figure 9.7. Plan the operation
sequence and assign operations to machines such that the cycle time of
producing parts is minimized.
9.2 A part requires five (5) machining operations, each to be performed with a
special tool. The time needed to complete each operation (including tool
changing time) is given in the table. The operations must be performed in the
sequence given in the table. (Op. 1, then 2, etc.)
Operation 12345
Time (seconds) 100 80 60 60 100
Figure 9.19 Reconfigurable assembly system based on hexagonal configuration.
250
RECONFIGURABLE MANUFACTURING SYSTEMS