Koren B., Vuik K. (Editors) Advanced Computational Methods in Science and Engineering
Подождите немного. Документ загружается.

Simulation of Progressive Failure in Composite Laminates
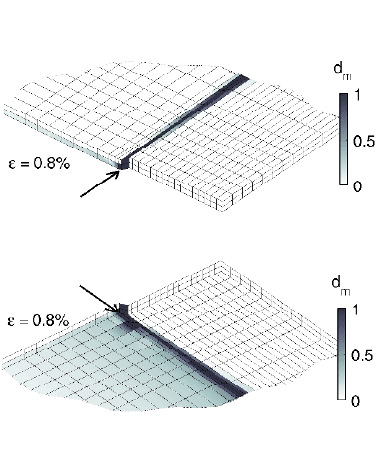
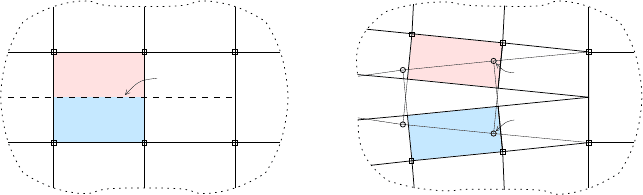
Fig. 12 Subcritical failure when realistic parameters are used for both plies with continuum dam-
age as seen from above (left) and below (right).
easily than in the real material. This we explain with the following micromechanical
considerations. A band with matrix shear failure in fiber direction can develop into
a macrocrack running between the fibers, which is a relatively brittle mechanism,
while a band with matrix shear failure in any other direction is crossed by fibers,
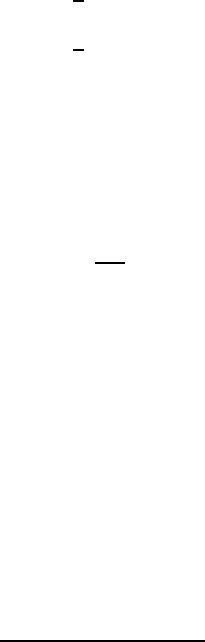
and the corresponding failure mechanism is therefore more ductile (see Figure 13).
In the presented continuum failure models, however, there is no influence of the
orientation of a band with matrix failure on the stress-strain behavior. A matrix
crack running between the fibers (Fig. 13 (a)) is represented in the displacement
field with localized
ε
21
, and a band with matrix microcracking (Fig. 13 (b)) with
localized
ε
12
, both corresponding with the same unique relation between
τ
12
and
γ
12
= (
ε
12
+
ε
21
)/2, while in the real material the averaged stress strain response
is different for the two mechanisms (Fig. 13 (c)). Notably, no continuum damage
models for composite materials exist which provide a solution to this problem.
A positive remark with respect to the last results can also be made, namely that
smeared degradation in the 90
◦
ply is observed, which may be understood as repre-
senting distributed matrix cracking. In the simulation results, this is clearly visible
(see Fig. 12). This is considered an appropriate mesolevel representation of the mi-
cromechanical distributed cracking, because this phenomenon is not characterized
by individual matrix cracks but rather by the quasi-homogeneousdegradation. How-
ever, the interply damage that is present around the matrix cracks on the microlevel
is not obtained in the mesomodel interface.
355
F.P. van der Meer and L.J. Sluys
1
2
Discrete crack
Damaged
band
(b)
(a)
γ
12
τ
12
(a) (b) (c)
Fig. 13 Micromechanical representation of matrix failure oriented in fiber direction (a) and matrix
failure in a band crossed by fibers (b). The difference in averaged stress-strain response is illustrated
schematically (c).
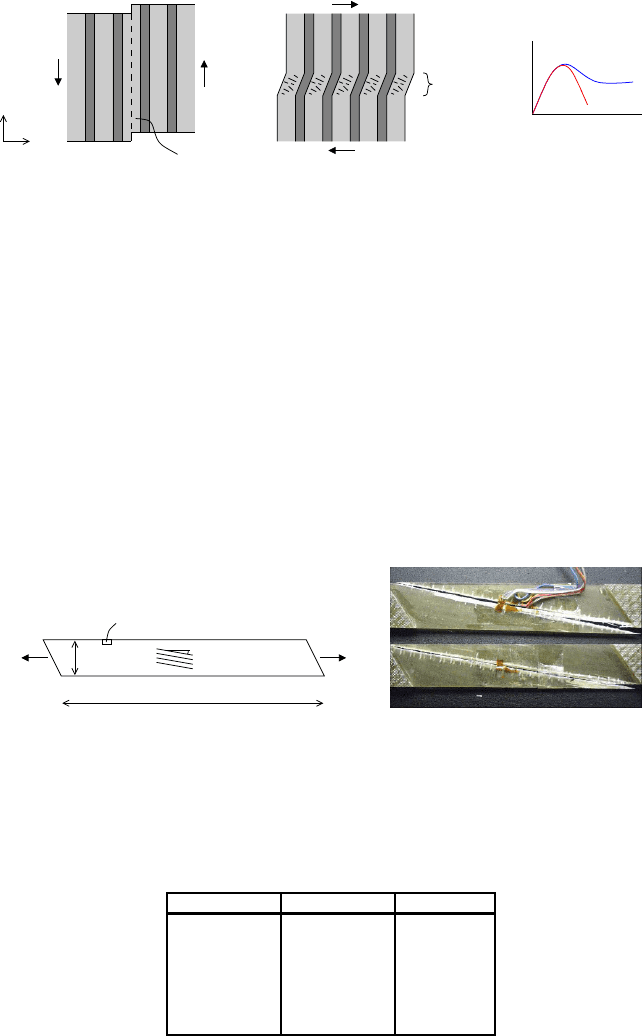
2.5 Off-axis tensile test
Next, we consider an off-axis tensile test on a 10
◦
unidirectional laminate. This is a
standard test for the determination of the in-plane shear strength [9,47]. Experiments
show brittle matrix failure. In a sudden event, the specimen breaks, with the crack
running in fiber direction, as shown in Fig. 14. With this relatively simple example
we try to further emphasize and clarify the pathology encountered in the previous
example.
58 mm
8 mm t = 3 mm
Weak zone to initiate failure
10
◦
Fig. 14 Setup for off-axis tensile test and experimentally observed failure (Van Paepegem et
al. [48], used with permission from Elsevier).
Table 3 Material parameters for off-axis tensile test. Elasticity and tensile strength parameters are
taken from Van Paepegem et al. [47] (glass/epoxy).
Elasticity Ply strength Damage
E
1
38.9 GPa F
1t
901 MPa A
f
100 -
E
2
13.3 GPa F
1c
800 MPa A
m
3 -
ν
12
0.26 -
F
2t
36.5 MPa B
f
60 s
−1
ν
23
0.4 -
F
2c
70 MPa B
m
60 s
−1
G
12
5.13 GPa F
12
52 MPa
F
23
34.8 MPa
356
Simulation of Progressive Failure in Composite Laminates
A horizontal displacement is applied to the right side of the specimen, which is
free in vertical direction. Oblique ends with an angle of 54
◦
with the load direction
are used, so that for linear elasticity the stress state is homogeneous, thus eliminating
edge effects. In order to trigger localization the longitudinal shear strength F
12
is
reduced from 56 to 40 MPa in an area of 1 ×0.5 mm. Two different meshes are
used, with an in-plane element size of 0.5×0.5 mm and 0.25×0.25 mm in the area
of interest.
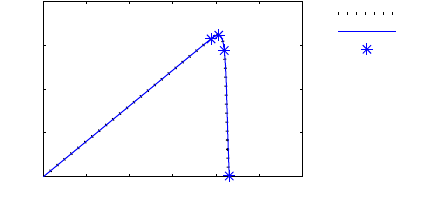
0 0.2 0.4 0.6 0.8 1
0
2
4
6
8
F (kN)
ε
(%)
Coarse
Fine
In Fig. 16
Fig. 15 Load-displacement relation for off-axis tensile test with continuum damage model and
two different meshes.
Figure 15 shows the load displacement diagram and final deformed mesh ob-
tained with the continuum damage model. The influence of the element size on the
load-displacement behavior is sufficiently small, which is related to the fact that the
band with localized strain is wider than the elements, due to the viscous term. From
the deformed mesh pictures (Fig. 16), which are solutions related to the coarse mesh,
it can be observed that the failure pattern is completely different from that observed
in experiments.
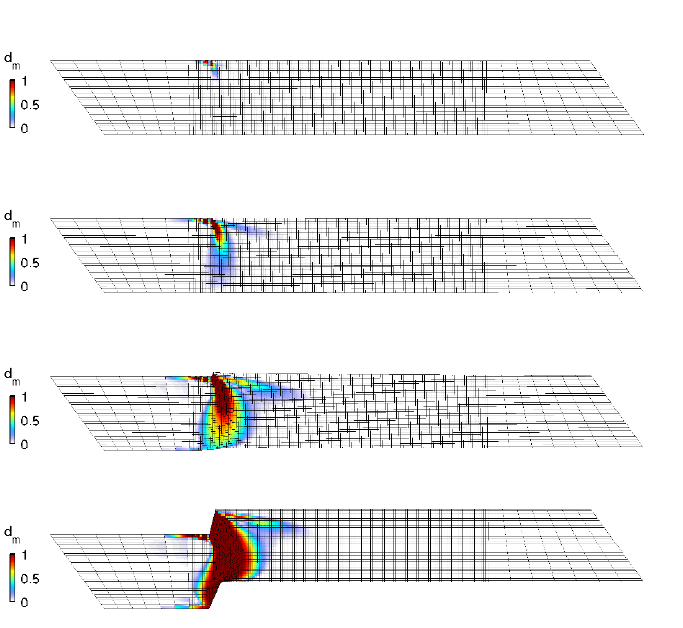
Notably, there is a significant displacement perpendicular to the load direction.
The deformation is such that the strain in fiber direction
ε
1
remains relatively small
in the localization area. This is caused by the fact that the stiffness in fiber direction
remains almost completely unaffected during the analysis. This behavior stems from
the important feature that, locally, a stress state for which matrix failure may be
expected, does not give rise to a strain state which implies fiber failure.
However, although the local behavior is correct, the global behavior is not. The
fact that
ε
1
remains small, is not sufficient to obtain localized deformation aligned
with the fibers. In Fig. 16, it can be observed that, immediately when damage is ini-
tiated outside the region with reduced strength, the localization occurs at the wrong
position. There is also a band with damage which is located approximately in fiber
direction, but this remains secondary throughout the analysis.
The cause for this behavior lies in the fact that the direction of failure propagation
is governed by the stress concentration rather than by the fiber direction. This is a
consequence of the homogenization which is fundamental to the continuum models.
In the real material the failure will be contained in the weaker matrix domain, while
357
F.P. van der Meer and L.J. Sluys
Fig. 16 Evolution of matrix damage in off-axis tensile test with continuum damage (∆x =
0.25 mm).
the homogenized continuum damage model does not offer this domain separation,
as illustrated in Fig. 17. We stress that this is not resolved by distinguishing between
matrix and fiber failure in the degradation of the continuum, as is common practice
in continuum damage models for composite materials.
With this example, the consequences of the limitation encountered in the previous
example are clearly visible. It can be concluded that there is a fundamental problem
in the modeling of failure in composites with continuum models. The micromechan-
ical cause for cracks to grow in fiber direction, is not present in continuum models,
at least not as long as the model descriptions are purely local. It is unlikely that
mechanisms, in which macrocracks in fiber direction play a role in different plies
with different fiber orientation, such as the delamination failure in Fig. 2, can be
predicted using state-of-the-art continuum models for ply failure, irrespective of the
failure criteria and damage evolution laws that are applied. However, for other fail-
ure mechanisms, the continuum description might serve well, e.g. when failure in
358

Simulation of Progressive Failure in Composite Laminates
all plies is localized in a single plane [7]. In some cases the matrix crack will emerge
correctly, such as the 45
◦
crack presented by Pinho et al. [37], the split near a circu-
lar hole as reported by Cox and Yang [10] and the split in the 0
◦
-ply in the notched
plate example. But, as far as localized matrix failure in a single ply is concerned, the
predictive quality of continuum models should be doubted.
Laˇs and Zemˇcik [24] have the same difficulty in correctly representing cracks that
are oriented in fiber direction correctly. They solve it by aligning elements with the
fiber direction in the critical region in combination with a non-regularized material
model. Obviously, this only works when mesh-objectivity is not regarded, which
limits the predictive quality of the model.
homogen.
material
fiber
matrix
1
2
Fig. 17 Crack propagation in a homogeneous orthotropic medium and in a fiber-matrix material.
3 Phantom node method
In this section, a discontinuous representation of matrix cracking is presented. Fol-
lowing the work by Hansbo and Hansbo [17], Mergheim et al. [30] and Song et
al. [43], a crack is introduced by addition of an extra element on top of an exist-
ing element. It has been shown [43], that this method is equivalent to the extended
finite element method (XFEM) in which a discontinuity in the displacement field
is introduced by enrichment of the shape functions with the Heaviside step func-
tion [32, 51]. With this method, we can force the crack to grow in fiber direction
and as such avoid the spurious mechanism encountered with the continuum damage
approach, thus incorporating the micromechanical observation that cracks tend to
grow between the fibers (Fig. 17) in the mesomodel.
First the kinematic and equilibrium relations of the phantom node method are
introduced, then the applied crack propagation criterion, the constitutive relation
and the consistent tangent are discussed. The performance of the model is illustrated
with the off-axis tensile test introduced in the previous section.
3.1 Kinematical and equilibrium relations
In Fig. 18, it is illustrated how the discontinuous displacement field is composed
of the displacements of two overlapping elements, referred to as element A and
element B. Four phantom nodes, ˜n
1
,.. ., ˜n
4
, are introduced on top of the four existing
359
F.P. van der Meer and L.J. Sluys
nodes, n
1
,.. .,n
4
. The element domain is subdivided by a crack segment,
Γ
, into
subdomains
Ω
A
and
Ω
B
;
Ω
A
is corresponding with the active part of element A and
Ω
B
with the active part of element B. The connectivity of the overlapping elements
is
nodes
A
= [ ˜n
1
, ˜n
2
,n
3
,n
4
],
nodes
B
= [n
1
,n
2
, ˜n
3
, ˜n
4
].
(19)
The displacement field is defined as
u(x) =
N(x)u
A
, x ∈
Ω
A
,
N(x)u
B
, x ∈
Ω
B
,
(20)
where N(x) are the standard finite element shape functions and u
A
and u
B
are the
nodal displacements of element A and element B, respectively. The displacement
jump over the crack is
δ
(x) = N(x)(u
A
−u
B
), x ∈
Γ
. (21)
Ω
A
Ω
B
Γ
n
1
n
1
˜n
1
n
2
n
2
˜n
2
n
3
n
3
˜n
3
n
4
n
4
˜n
4
Fig. 18 Connectivity and active parts of two overlapping elements in phantom node method.
Figure 18 also shows that closure of the crack tip is enforced automatically, when
no phantom nodes are added on the element boundary that contains the tip.
The contribution to the nodal forces from the bulk material of the old element
(there is no conceptual difference between the old and the new element, both are
connected to some old and some new nodes and integrated over part of the original
domain, but in the code the ’old’ element is the one that has the original element
number) are computed with
f
bulk
A
=
Z
Ω
A
B
T
σ
(
ε
A
)d
Ω
r, (22)
with
ε
A
= Bu
A
, (23)
360
Simulation of Progressive Failure in Composite Laminates
where
Ω
A
is the active part of the domain associated with the old element,
σ
can be
any linear or nonlinear law of
ε
, and u
A
are the nodal displacements associated with
the old element and B is the strain nodal displacement matrix. And similarly:
f
bulk
B
=
Z
Ω
B
B
T
σ
(
ε
B
)d
Ω
, (24)
with
ε
B
= Bu
B
. (25)
The contribution to the nodal forces from the cohesive traction are computed
with
f
coh
A
=
Z
Γ
N
T
t(
δ
)d
Γ
(26)
and
f
coh
B
= −
Z
Γ
N
T
t(
δ
)d
Γ
. (27)
The displacement jump is defined on each point x on
Γ
as
δ
(x) = u
A
(x) −u
B
(x) = N(x)u
A
−N(x)u
B
. (28)
This jump may be rotated to the local frame with
¯
δ
=
δ
n
δ
s
= Q
δ
, (29)
where (in 2D)
Q =
−sin
φ
cos
φ
cos
φ
sin
φ
=
n
T
s
T
. (30)
3.2 Crack propagation
For the modeling of crack propagation with the XFEM or the phantom node method,
generally two criteria are needed:
• a criterion to decide whether a crack grows or not ,
• a criterion to asses in which direction the crack grows .
In the particular context of splitting in laminates, the second criterion becomes
trivial, because the propagation direction is fixed, viz. equal to the fiber direction. To
test for propagation, the stress in the tip element is checked with a stress criterion.
361

F.P. van der Meer and L.J. Sluys
f (
σ
) =
s
h
σ
2
i
F
2t
2
+
τ
12
F
12
2
, (31)
which is the plane stress equivalent of Hashin’s criterion for tensile matrix failure
Eq. (6). With the operator h·i= max{·,0}compressive matrix stresses are neglected.
3.3 Cohesive law
A cohesive traction is applied on the crack surface. With this, the amount of energy
that is dissipated as the crack propagates can be controlled and the singularity in
the strain and stress field near the crack tip is avoided. Ideally, the traction t would
be defined as a function of the displacement jump
δ
. However, the application of
a direct traction separation law for mixed mode cracking leads to computational
instability. This stems from the fact that the traction is not uniquely defined for zero
crack opening; in a uni-axial case it is obvious that the traction should be equal to
the strength, but in a mixed mode formulation it can be either equal to the normal
strength with no shear traction, or to the shear strength with no normal traction,
or something in between. The traction evaluation itself is always feasible, because
after crack extension the crack opening which gives equilibrium will not be equal
to zero, but the highly nonlinear nature of the traction separation law does endanger
the stability of the Newton Raphson procedure.
However, the traction law may be constrained using equilibrium considerations.
When the bulk element that is cut by the crack segment is predominantly loaded
in tension, equilibrium demands that the traction in the crack is also predominantly
tensile traction, and when the bulk element is loaded in shear, the traction should
be shear traction. With this in mind, a new traction law, in which the bulk stress is
taken into account, has been developed by Moonen et al. [33]. This law is presented
here in adapted form.
Similar to the continuum damage model, an effective traction is computed, which
can be interpreted as the effective traction working on the reduced surface of a par-
tially cracked domain. The effective traction is defined in the local frame {n,s}:
ˆ
t =
ˆ
t
n
ˆ
t
s
= Q
σ
n+ TQ
δ
. (32)
When T is replaced with the acoustic tensor n
T
D
e
n, this effective traction can be
related to the elastic stress in the damaged cross section [33, 34]. In the present
model, however, the exact value of T is of little importance, it only serves as a
stabilization parameter. Therefore it is considered safe to use a scalar quantity T for
the sake of simplicity. For the results presented in this work, we set T equal to the
first diagonal entry of the acoustic tensor.
In Voigt notation,
σ
n is computed as
362
Simulation of Progressive Failure in Composite Laminates
σ
n = H
σ
, (33)
with (in 2D)
H =
n
1
0 n
2
0 n
2
n
1
. (34)
Notably, since the crack is parallel to the fiber, the vector H
σ
contains the material
stress components
σ
2
and
τ
12
.
The bulk stress at
Γ
, which is used in Eq. (32), is not uniquely defined. Indiffer-
ence to which element is labeled A and which is labeled B is maintained by comput-
ing the stress with the averaged strain:
σ
Γ
=
σ
(
ε
Γ
), (35)
with
ε
Γ
=
1
2
ε
Γ
+
+
ε
Γ
−
=
1
2
B(u
A
+ u
B
). (36)
Similar to continuum damage, the effective traction is reduced with a damage
variable (denoted
ω
). The traction in local frame is defined as:
¯
t = [I −Ω]
ˆ
t, (37)
with
Ω =
ω
h
ˆ
t
n
i
ˆ
t
n
0
0 1
. (38)
Introduction of the factor h
ˆ
t
n
i/
ˆ
t
n
, which is equal to 1 when
ˆ
t
n
> 0, and equal to 0
otherwise, suffices to prevent interpenetration of the cracked parts
3
, because with
this factor,
ˆ
t
n
< 0 ⇒ t
n
=
ˆ
t
n
, and, with the assumption of equilibrium (t
n
= (
σ
n)
1
),
this gives in turn t
n
=
ˆ
t
n
⇒
δ
n
= 0. Because equilibrium is only weakly met, limited
interpenetration may occur, but this can be expected to vanish upon mesh refine-
ment.
The traction computed with Eq. (37) is rotated back to the global coordinate
frame, such that the cohesive law can be summarized as:
t = Q
T
[I −Ω]Q {H
σ
+ T
δ
}. (39)
During the failure process, the effective traction increases. The damage evolution
is driven by a state variable, denoted
κ
which is the temporal maximum of a scalar
3
Provided that rotations remain small. Extension to large rotations is possible but not presented
here.
363
F.P. van der Meer and L.J. Sluys
measure for the magnitude of the effective traction:
κ
(
τ
) = max
t≤
τ
s
h
ˆ
t
n
i
F
2t
2
+
ˆ
t
s
F
12
2
. (40)
Damage variable
ω
evolves with state variable
κ
with the following law that
results in a linear (softening) relation between displacement jump and traction:
ω
=
κ
f
(
κ
−1)
κ
(
κ
f
−1)
,
κ
<
κ
f
,
1,
κ
≥
κ
f
.
(41)
The derivation of the expression for
κ
f
will be outlined in the remainder of this
section.
We assume that the material behavior can be described properly with the phe-
nomenological relation proposed for delamination by Benzeggagh and Kenane [4],
which was applied in interface elements by Camanho, Turon et al. [6, 45]:
G
Tc
= G
Ic
+ (G
IIc
−G
Ic
)
G
II
G
I
+ G
II
η
, (42)
in which G
Ic
is the mode I fracture energy, G
IIc
is the mode II fracture energy,
η
is
an additional material parameter, and the ratio G
II
/(G
I
+ G
II
) indicates the actual
mode mixity.
We define the mode ratio
β
as:
β
=
ˆ
t
2
s
ˆ
t
2
s
+ h
ˆ
t
n
i
2
. (43)
This expression can be rewritten as
ht
n
i= |t
s
|
s
1 −
β
β
. (44)
Assuming equilibrium between the cohesive traction acting on the crack surface and
the bulk stress directly next to this surface (H
σ
= t), it follows from Eq. (39) that
the ratio between the displacement jump components is necessarily the same:
δ
n
= |
δ
s
|
s
1 −
β
β
. (45)
Therefore, for a fixed mode ratio
β
, the ratio between the energy release of the
two modes is fixed:
G
I
G
II
=
R
t
n
d
δ
n
R
t
s
d
δ
s
=
1 −
β
β
(46)
364