Koren B., Vuik K. (Editors) Advanced Computational Methods in Science and Engineering
Подождите немного. Документ загружается.

Data Assimilation Algorithms for Numerical Models
state=model.getstate
state=state+delta_state
model.setstate(state)
A disadvantage of this implementation is that it does not provide much flexibility.
The preferred implementation in COSTA is:
model.axpy(1.0,delta_state) //note axpy: y=alpha
*
x+y
If the model state contains for example concentrations that must be positive at
all time, the model programmer can handle this nicely by implementing the axpy
method. An additional advantage of the axpy-method is that this eliminates the need
for the unnecessary copying of state vectors. When the model interface does not im-
plement the axpy method it will be implemented by COSTA using the getstate and
setstate methods of the model component. In some situation it is not not possible for
COSTA to fill in the missing methods. However this is not always a problem. For
example a model that does not implement an adjoint can still work with the sequen-
tial data assimilation methods in COSTA. It is always possible to add the missing
methods when needed.
COSTA is set up such that it can be used for a wide range of data assimila-
tion and calibration methods. Currently COSTA contains the following sequential
data assimilation methods: Ensemble Kalman Filter (EnKF) (Evensen, 2003), En-
semble Square Root Filter (EnSRF) (Whitaker and Hamill, 2002), Complementary
Orthogonal subspace Filter For Efficient Ensembles (COFFEE) (Heemink et al.,
2001) and RRSQRT Kalman filter (Verlaan and Heemink, 1997). The model cal-
ibration in COSTA where time independent model parameters are calibrated. The
available methods are: the Conjugate Gradient (CG) method (Fletcher and Reeves,
1964), a Quasi Newton methods using the LBFGS method (Nocedal, 1980 and Byrd
et al.,1994) and the Simplex method (Nelder and Mead, 1965).
5 Applications in coastal sea modeling
5.1 Storm surge prediction using Kalman filtering
Large areas of the Netherlands lie below the mean sea water level, which give rise
to a continuous risk of storm surge flooding. A number of severe floods of this kind
have occurred in the past. The last disaster in 1953 killed more than 1800 people
and flooded over 340.000 acres of land in the southwest of the Netherlands. In order
to prevent such disaster from recurring, a number of projects concerning safety have
been conducted, which include heightening the dikes and constructing some mov-
able storm surge barriers. In connection to this, accurate storm surge predictions
at least six hours ahead, are necessary to decide what precautionary actions have
to be taken to protect the dikes and for proper closure of the movable storm surge
barriers. Since the mid-1980s, these predictions are based on a numerical hydrody-
123
A.W. Heemink et al.
namic model called the Dutch Continental Shelf Model (DCSM). To increase the
predictive capability, in the operational system observed water level is assimilated
to the DCSM. In this section we describe the DCSM and data assimilation technique
applied to it, which is used operationally in the Netherlands.
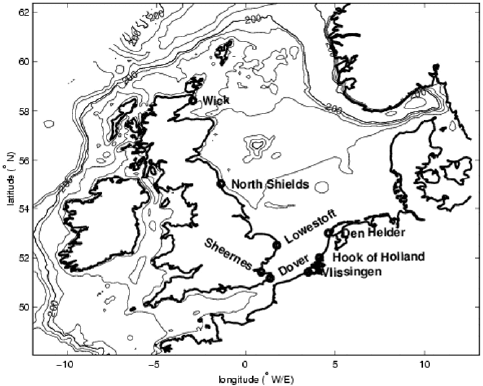
The DCSM covers the area of the north-east European continental shelf, i.e.
12
o
W to 13
o
E and 48
o
N to 62
o
N as shown in Figure 3. It is based on the two
dimensional non-linear shallow water equations, which describe the large-scale mo-
tion of water level and depth-integrated horizontal flow. (Gerritsen, et.al. [1995]).
At closed boundaries (coastlines) the flow velocity perpendicular to the coastline is
set to zero. On the other hand, at open boundaries, the flow velocity parallel to the
boundaries is set to zero and tidal harmonic water set-up is specified with ten tidal
constituents: M2, S2, N2, K2, O1, K1, Q1, P1, NU2, and L2.
Fig. 3 DCSM area with some water-level observation stations used in assimilation
To solve the system of equations which describes the model, discretization using
an Alternating Directions Implicit (ADI) method and a staggered C-grid is used. The
numerical scheme is developed by Stelling (1984) based on the work of Leendertse
(1967), solved in spherical grid (e.g. Verboom, et.al. [1992]). The resolution of the
spherical grid is 1/8
o
×1/12
o
, which is approximately 8 ×8 km. This configuration
results in 201 ×173 computational grid cells with 19809 active cells. The time step
is 10 minutes. This model uses forecasts of the KNMI (Netherlands Meteorological
Institute) meteorological high-resolution limited area model (HiRLAM) as input.
Since 1992, a special feature of DCSM has been added, which is the use of as-
similation of real-time measurements from tide gauges using a steady-state Kalman
filter (Heemink and Kloosterhuis, 1990). The objective of the implementation of this
filter is to improve the initial state from which to start the forecast. This filter assim-
124
Data Assimilation Algorithms for Numerical Models
ilates the selected water level observations from eight tide gauges at the British and
Dutch coasts (see Figure 3). Observations from British gauges during the period of
surge coming from the Atlantic, contain information on the surge in the Southern
North Sea several hours ahead. If they can be assimilated into the model, external
surges can be included and errors due to imperfect meteorology during this period
can be corrected for (Gerritsen et.al., 1995).
The implementation of the Kalman filter requires a conceptual change from the
deterministic model into a stochastic model. This is done by adding error terms
to the deterministic model. In the operational DCSM, the errors in the model are
assumed to be introduced by the uncertainty in the wind input. In the operational
system, this uncertainty is accounted for by adding error terms to the u and v depth-
average velocities (Heemink and Kloosterhuis, 1990).
The implementation of the Kalman filter on the DCSM is done by exploiting the
fact that the observations come from a fixed network and by assuming that the er-
ror statistics in the model and the observations vary only slightly in time (Gerritsen
et.al., 1995). This means that the solution for the covariance equations in Section
3.2 will become constant after several recursions. Since the propagation of the er-
ror covariance is independent from the real observation, it is possible to compute
the steady-state Kalman gain off-line. The use of the steady-state Kalman filter has
the advantage of being computationally cheap. It leads to only 10% extra computa-
tional cost (Gerritsen et.al., 1995). For the operational system, the computation of
the steady-state Kalman gain is carried out by using a Chandrasekhar-type algorithm
(Heemink and Kloosterhuis, 1990). Another ensemble type algorithm for comput-
ing the steady-state Kalman gain implemented on DCSM is proposed by Sumihar,
et.al [2008]. Once the Kalman gain is computed, the original non-linear model is
used to propagate the mean for prediction.
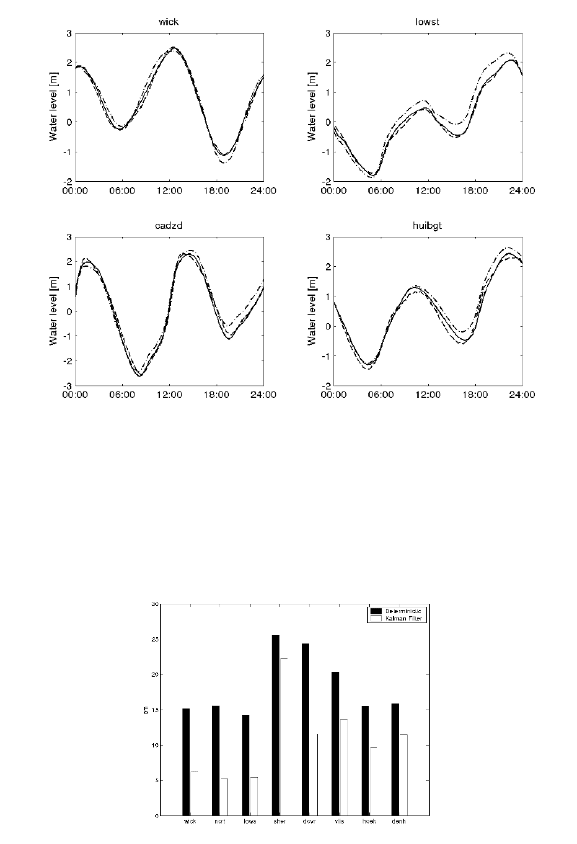
To illustrate the effect of implementing steady-state Kalman filter on DCSM,
in Figure 4 we show the time series of water level on the whole day of 12 Jan-
uary 2005, obtained from observation, model results with and without assimilation
at four locations. Two of these stations (Wick and Lowestoft) are located on the
British coast, of which the data is used for assimilation. On the other hand, the other
two stations, Cadzand and Huibertgat, are located in the South-west and North of
the Netherlands respectively. The data from the latter are not used for the assimi-
lation. By visual check on Figure 4, we see that by assimilation, the model results
are pulled closer towards the observation. To acquire a better idea about the filter
performance in assimilating observed data, the root-mean-square (RMS) of water
level innovation is computed over the simulation period of 1 November 2004 - 1
February 2005. The RMS innovation of water level is computed both for assimila-
tion and validation stations. Assimilation station is the station whose data is used
for assimilation, while validation station is the one where data is used for validation
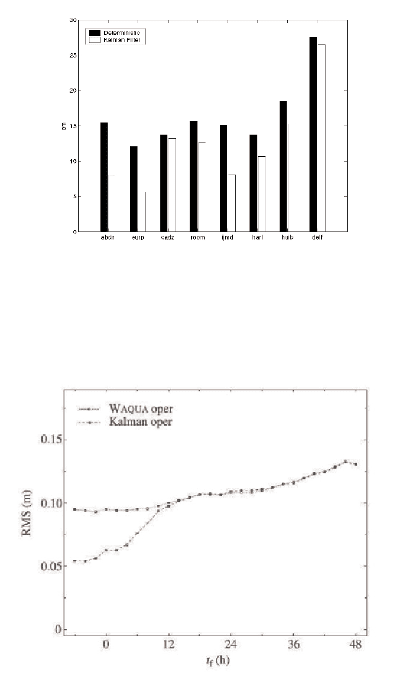
but not for assimilation. The results are presented in Figures 5-6. It is clear from
these pictures that the Kalman filter reduces the RMS innovation of water level in
both assimilation and validation stations. This indicates that the correction is prop-
agated spatially consistent as it also applies to locations where data is not used for
assimilation. This demonstrates that the filter succeeds in forcing the model closer
125
A.W. Heemink et al.
to the observation. The steady-state Kalman filter is used in operational system for
reinitializing the model before making forecast. The output is evaluated every few
months, after every severe storm and if the hydrologist or meteorologist indicates
any flaws. To illustrate the forecast performance, we show in Figure 7 an example of
operational validation, consisting the RMS forecast errors with and without Kalman
filter (Verlaan, et.al. 2005).
Fig. 4 Water level time series at Wick, Lowestoft, Cadzand, and Huibertgat on 12 January 2005.
The dashed lines represent observed water level, the dash-dotted lines model results without as-
similation, and the full-lines model results with assimilation.
Fig. 5 RMS innovation of water level at assimilation stations
126
Data Assimilation Algorithms for Numerical Models
Fig. 6 RMS innovation of water level at validation stations
Fig. 7 Operational evaluation for location Scheveningen. RMS errors for different forecast ranges
with and without Kalman filter (picture is taken from Verlaan, et.al [2005])
.
5.2 Using an RRSQRT Kalman filter to assimilate HF radar data
into a 3D coastal ocean model
5.2.1 Introduction
This section presents extensive experiments that have been done with a time-
dependent Kalman filter for a large-scale, three dimensional numerical model of
the coastal region near IJmuiden in the Netherlands (the IJmond model). The fil-
ter has been used to assimilate high frequency(HF)-radar measurements and ADCP
127
A.W. Heemink et al.
measurements into the model. The experiments have been done both to show that
Kalman filtering for such large-scale models is feasible and to investigate the 3D ef-
fects in the data-assimilation. The IJmond region is the region around IJmuiden, on
the North-West coast of the Netherlands. It is the entrance to the Noordzee channel,
which leads to the port of Amsterdam, the capital of the Netherlands. Apart from
this, the IJmond region is economically important in its own right.
In regions like IJmond, 3D models are far superior to 2D models because they
are capable of representing stratification and the related flow phenomena. A proper
representation of these phenomena is needed to bring in large ships under strong
flow conditions. Without such models, large ships have less opportunities to safely
enter the harbor or the Noordzee channel, which has an obvious negative economic
effect.
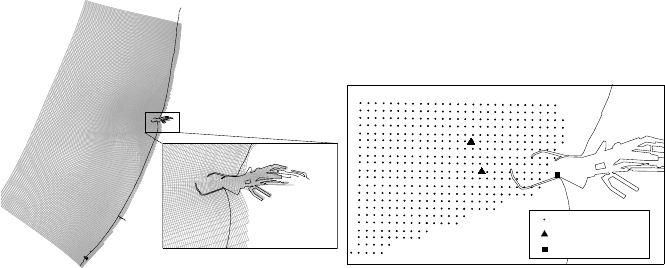
HF radar velocity
ADCP velocity
waterlevel
Fig. 8 Left: The computational grid for the IJmond model.
Right: Locations of the observation points.
The region of interest covers some 70 km along the coast and stretches some 40
km into the sea (see Figure 8). It is a rather shallow, sandy region with a maximum
depth of about 28 meters. The main feature is a channel in the bottom to allow
taller ships to enter the harbor, and a very deep pit just before the entrance to the
harbor. The flow is predominantly along-shore. The entrance to the harbor itself is
protected by two piers, one to the north and one to the south. The harbor is known for
significant short-term variations in water level within the harbor. Sweet water enters
the region from the Noordzee channel at moments when the sluices are opened. This
means that there is a very relevant interaction between sweet and salt water in the
IJmond region.
5.2.2 The TRIWAQ model for the IJmond region
The numerical model used for this study is the 3D flow model TRIWAQ. It is the
3D variant of the WAQUA model, which is an operational software system used
128
Data Assimilation Algorithms for Numerical Models
for a wide range of applications by the Directorate for Public Works and Water
Management. This directorate is responsible for the management of the major water
systems in the Netherlands, including the coastal region.
−16 −14 −12 −10 −8 −6 −4 −2 0 2
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
z−location [m−NAP]
stddev amp [m]
ADCP−A (04−Dec−1998 00:00:00)−(05−Dec−1998 09:45:00)
No filtering
ADCP−A
−16 −14 −12 −10 −8 −6 −4 −2 0 2
0
0.5
1
1.5
z−location [m−NAP]
stddev dir [rad]
ADCP−A (04−Dec−1998 00:00:00)−(05−Dec−1998 09:45:00)
No filtering
ADCP−A
−16 −14 −12 −10 −8 −6 −4 −2 0 2
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
z−location [m−NAP]
stddev amp [m]
ADCP−B (04−Dec−1998 00:00:00)−(05−Dec−1998 09:45:00)
No filtering
ADCP−A
−16 −14 −12 −10 −8 −6 −4 −2 0 2
0
0.5
1
1.5
z−location [m−NAP]
stddev dir [rad]
ADCP−B (04−Dec−1998 00:00:00)−(05−Dec−1998 09:45:00)
No filtering
ADCP−A
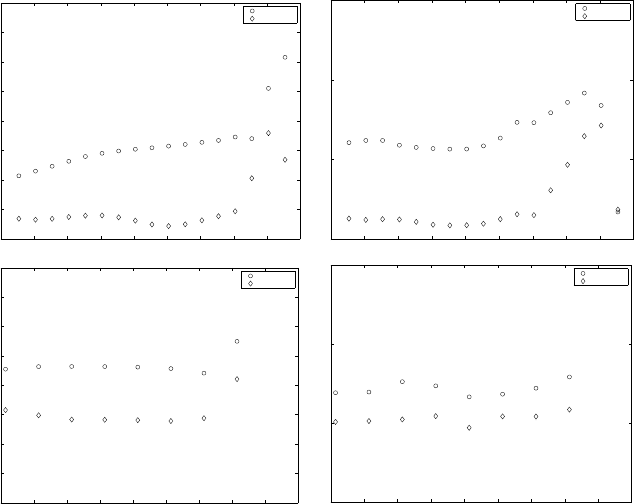
Fig. 9 Standard deviation of the difference between observed and predicted velocity in ADCP-
point A (top) and ADCP-point B (bottom) with and without assimilation of actual data from ADCP
A. The left-hand plots apply to the magnitude of the velocity, the right-hand plots apply to the
direction.
TRIWAQ is based on a finite-difference discretization of the shallow water equa-
tions and includes a transport model for salinity and temperature. Forcing is done
by boundary conditions which can be composed of different combinations of water
level, flow velocity and discharge. The wind can be applied uniformly or through
a spatially varying wind velocity and pressure. Bottom-friction is modeled through
Ch
´
ezy coefficients computed according to the Manning or the White-Colebrook
equations. TRIWAQ has extensive features for the modeling of drying and flooding
and for special hydrodynamic objects such as barriers, weirs and sluices.
The IJmond region is modeled in TRIWAQ by a curvilinear grid with a maximum
extension of 188 grid-points along the coast and 230 grid-points in the cross-shore
direction (see Figure 8). The grid is highly contracted around the harbor area to
give a high resolution there. In vertical direction, the flow field is modeled with four
equidistant sigma layers. This is much less than what is common for coastal models
129
A.W. Heemink et al.
(which usually apply more than ten layers). The main reason for using such a small
number of layers is to keep the amount of computations within limits. At the same
time, it should be able to represent at least some of the vertical dynamics. The time
step is half a minute, mainly to accommodate for the fine mesh inside the harbor.
Boundary conditions are given along the sea-perimeter of the model. The boundary
conditions are determined from a 2D model of the entire Dutch coastline.
−16 −14 −12 −10 −8 −6 −4 −2 0 2
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
z−location [m−NAP]
stddev amp [m]
ADCP−A (04−Dec−1998 00:00:00)−(04−Dec−1998 18:50:00)
No filtering
All
selected HFR
ADCP−A
−16 −14 −12 −10 −8 −6 −4 −2 0 2
0
0.5
1
1.5
z−location [m−NAP]
stddev dir [rad]
ADCP−A (04−Dec−1998 00:00:00)−(04−Dec−1998 18:50:00)
No filtering
All
selected HFR
ADCP−A
−16 −14 −12 −10 −8 −6 −4 −2 0 2
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
z−location [m−NAP]
stddev amp [m]
ADCP−B (04−Dec−1998 00:00:00)−(04−Dec−1998 18:50:00)
No filtering
All
selected HFR
ADCP−A
−16 −14 −12 −10 −8 −6 −4 −2 0 2
0
0.5
1
1.5
z−location [m−NAP]
stddev dir [rad]
ADCP−B (04−Dec−1998 00:00:00)−(04−Dec−1998 18:50:00)
No filtering
All
selected HFR
ADCP−A
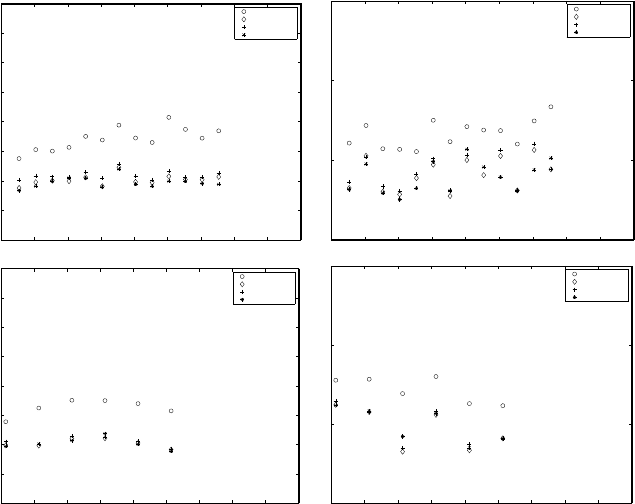
Fig. 10 Standard deviation of the difference between observed and predicted velocity in ADCP-
point A (top) and ADCP-point B (bottom) with and without assimilation of different kinds of
artificial data. The left-hand plots apply to the magnitude of the velocity, the right-hand plots apply
to the direction.
5.2.3 Kalman filtering for large 3D models
The quality of model predictions can be improved by applying data-assimilation:
using observations of the actual flow situation to correct the model state so that the
ensuing predictions are better. One of the methods to perform data-assimilation is
Kalman filtering.
The full Kalman covariance matrix in the case of the IJmond model would be
about 700.000×700.000 elements. The RRSQRT algorithm reduces this to a ma-
130
Data Assimilation Algorithms for Numerical Models
trix of 700.000×50 elements. Even with the RRSQRT approximation, computing
requirements are still excessive. But they can be handled on large scale parallel
computing facilities. Computing facilities that employ some form of parallelism are
quickly becoming a commodity. Modern PC’s use almost exclusively multi-core
processors and the use of computing-clusters is far from exceptional. In order to
use this type of hardware, a parallel version has been developed of the RRSQRT
Kalman filter implementation that is available for TRIWAQ. This parallel version
shows excellent speedup figures on up to 32 processors.
To show the feasibility of data-assimilation for a large scale 3D model, experi-
ments have been done using data from an extensive observation campaign that has
been done in 1998. This campaign involved the already existing tide gauge at one of
the harbor piers, two ADCP moorings just outside the harbor and an HF radar system
(see Figure 8). The ADCP’s are 1200 kHz workhorse ADCP’s, providing velocity
data for bins of 1 meter (Point A) and 2 meters (Point B). ADCP A is located just
outside the south pier, ADCP B is located somewhat further to the north-west. The
HF radar system has been located at the Harbor Operation Center (HOC) next to the
harbor and at Bloemendaal aan Zee, some five kilometers to the south. It has pro-
vided observations on a grid of 250×250 meters. There are about 450 grid points,
covering an area of about 7 ×4 km.
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
92 93 94 95 96 97 98 99 100 101 102
495
496
497
498
499
500
RDX [km]
RDY [km]
mean adc u
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
92 93 94 95 96 97 98 99 100 101 102
495
496
497
498
499
500
RDX [km]
RDY [km]
stdd adc u
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
92 93 94 95 96 97 98 99 100 101 102
495
496
497
498
499
500
RDX [km]
RDY [km]
mean adc v
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
92 93 94 95 96 97 98 99 100 101 102
495
496
497
498
499
500
RDX [km]
RDY [km]
stdd adc v
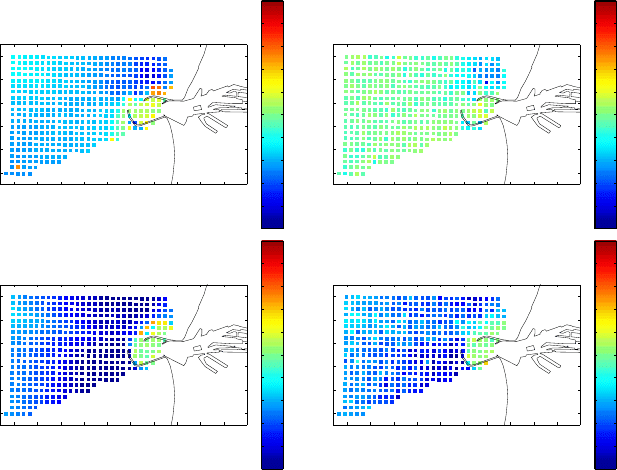
Fig. 11 Effect of assimilation of artificial data from ADCP A on the mean and standard-deviation
of the difference between predicted and observed velocities in HF-radar points. Colors mark values
in [ms
−1
]. Red colors indicate a deterioration, blue colors an improvement.
131
A.W. Heemink et al.
5.2.4 Results
The data-assimilation scheme itself works properly. Assimilating observations from
only ADCP A gives improvements also at the location of ADCP B some distance
away (see Figure 9). This illustrates that the adaptations made by the filter have
physical meaning. But the errors in HF-radar points do not benefit from the adap-
tations. This is most likely to be attributed to the poor quality of the HF-radar data
itself. Analysis of this data has shown that it often displays rather erratic flow pat-
terns. Even during the observation campaign, there were doubts about the quality
of the observations. Hence, any definite conclusions with respect to the HF-radar
data can not be drawn from these experiments. To determine whether better-quality
HF-radar observations could be beneficial, an experiment has been done in which
artificial HF-radar observations have been assimilated. The artificial observations
have been obtained from a run of the IJmond model with modified forcings. The
modifications to the forcings have been made in such a way that they match the
assumptions of the filter about the errors in the model. In this way, when the model
is run with the original, unmodified forcings, the filter should be able to reconstruct
the state from the distorted model by assimilating the artificial observations.
The experiments with artificial data show more consistent results than those using
the actual observations. In this case, the errors in the predictions at HF-radar obser-
vation locations are reduced by the assimilation of ADCP observations (see Figure
11). Furthermore, Figure 10 shows that assimilation of a selection of HF-radar ob-
servations also improves the predictions below the sea-level. The improvements are
comparable to those obtained by assimilating the ADCP observations. So, under cer-
tain assumptions it is possible to reconstruct a 3D flow pattern based on 2D HF-radar
observations. But the experiment is highly idealized. The uncertainty model used to
distort the forcings exactly matches the uncertainty model assumed by the Kalman
filter, which is usually not the case. Also, the HF-radar observations are assumed
to have independent and small observation errors. In particular the assumption of
independent errors is probably not correct in real HF-radar systems.
In conclusion, the experiment has primarily shown that data-assimilation based
on RRSQRT Kalman filtering for large-scale 3D coastal ocean models is feasible
with current technology.
6 Applications in atmospheric chemistry modeling
Elevated concentrations of ozone in the boundary layer (first 3 km of the atmo-
sphere) can cause adverse affects to humans and ecosystems (EC, 2002). Ozone
in the boundary layer is formed by chemical reactions of the ozone precursors, ni-
trogen oxides (NO
x
), volatile organic compounds (VOCs), and carbon monoxide
and methane under the influence of sunlight. The impact of ozone is not limited
to the area close to where the ozone precursors are emitted. Transboundary fluxes
transport these precursors over distances of hundreds of kilometers (Lelieveld et al.,
132