Комаров Ю.Ю. Проектирование и изготовление аэрокосмических аппаратов
Подождите немного. Документ загружается.


Д. А. Евланов, А. В. Лебедев, Г. П. Сачков, А. И. Черноморский
Московский авиационный институт (государственный технический университет)
ОДНООСНАЯ КОЛЕСНАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА
Одним из перспективных направлений робототехники является разра-
ботка высокомобильных транспортных платформ. Сочетая в себе такие
достоинства, как высокая мобильность и маневренность, низкие энерго-
затраты, автоматизированное управление, при высокой степени интегра-
ции бортовых средств данные устройства приспособлены для решения
задач самого широкого спектра. Высокая мобильность наиболее эффектив-
но обеспечивается в классе одноосных колесных транспортных платформ
(ОКТП), построенных по схеме inverted pendulum или обращенный маят-
ник [1]. Подобного рода разработки ведутся на протяжении нескольких
лет в ряде стран мира (США, Япония, Швейцария и др.), а также в ряде
вузов России, в частности в МГУ, МГТУ им. Баумана, СТАНКИНе, КБТУ
им. Х. М. Бербекова.
Следует отметить, что в большинстве научных публикаций и изданий
подробно не раскрывается информация об алгоритмах, принципах функ-
ционирования и структурах управления подобного рода устройствами; в
существующих схемах решаются, главным образом, задачи управления пе-
ремещением ОКТП. В ряде разработок обеспечивается стабилизация плат-
формы ОКТП в плоскости горизонта.
В настоящей работе рассматривается схема ОКТП (рис. 1), в которой
принципиально может быть решена задача придания платформе заданной
угловой ориентации, а также задача обеспечения её невозмущаемости си-
лами инерции при ускоренных движениях ОКТП.
Схема ОКТП состоит из колесной пары с колеей
, на оси вращения ко-
торой расположена рама, в которой, в свою очередь, укреплена платформа.
Центр масс
этой системы расположен над осью колёс. Приводные двига-
тели через редукторы осуществляют вращение колес и тем самым обеспе-
чивают требуемые направление и скорость перемещения ОКТП по рабочей
поверхности. При этом оба колеса являются ведущими, повороты ОКТП
в плоскости горизонта — бортовые и осуществляются за счет разности
скоростей вращения колес. Угловая стабилизация платформы осуществля-
ется на основе принципа силовой гироскопической стабилизации [2]. Для
этого на платформе установлены два двухстепенных гироскопа
и
(с датчиками углов прецессии , —ДУП,ДУП), обеспечивающие со-
ответственно стабилизацию вокруг оси
(исполнительный элемент — груз
, перемещаемый вдоль оси ) и вокруг оси (исполнительный элемент —
121
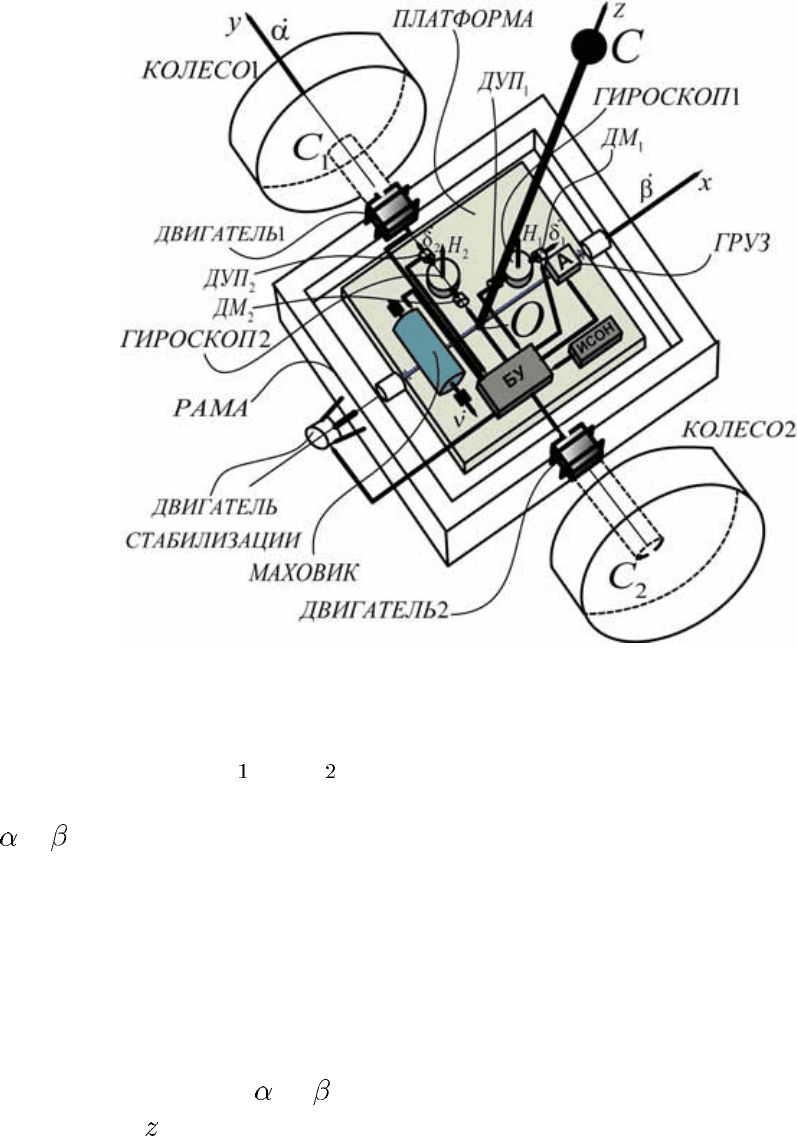
Рис. 1. Одноосная колесная транспортная платформа (двухстепенная)
двигатель стабилизации). На осях прецессий гироскопов установлены дат-
чики моментов ДМ
иДМ, с помощью которых осуществляется управле-
ние положением платформы относительно плоскости горизонта по углам
и . На платформе установлен также маховик и измерительная система
ориентации и навигации ИСОН.
Управление двигателями колёс, двигателем стабилизации, перемещени-
ем груза, маховиком и датчиками моментов гироскопов осуществляется
блоком управления БУ, на который поступает информация от ИСОН и от
гироскопов.
Основными особенностями схемы являются: две степени свободы плат-
формы — по углам
и , обеспечивающие возможность придания оси
платформы
необходимой угловой ориентации без использования поворо-
тов ОКТП; наличие гироскопической и маховичной систем стабилизации
наряду с инерционной системой, традиционной для схем с обращённым
маятником.
Уравнения движения ОКТП. Будем полагать, что движение ОКТП осу-
ществляется по рабочей поверхности, представляющей собой горизонталь-
ную плоскость; продольное и поперечное проскальзывания колес отсут-
ствуют. Вывод математической модели ОКТП базируется на использо-
122
вании теорем об изменении количества движения и момента количества
движения. На их основе были получены уравнения вращательного и по-
ступательного движения для каждого из тел, образующих ОКТП. Конечная
система нелинейных уравнений получена путём исключения внутренних
взаимодействий [2].
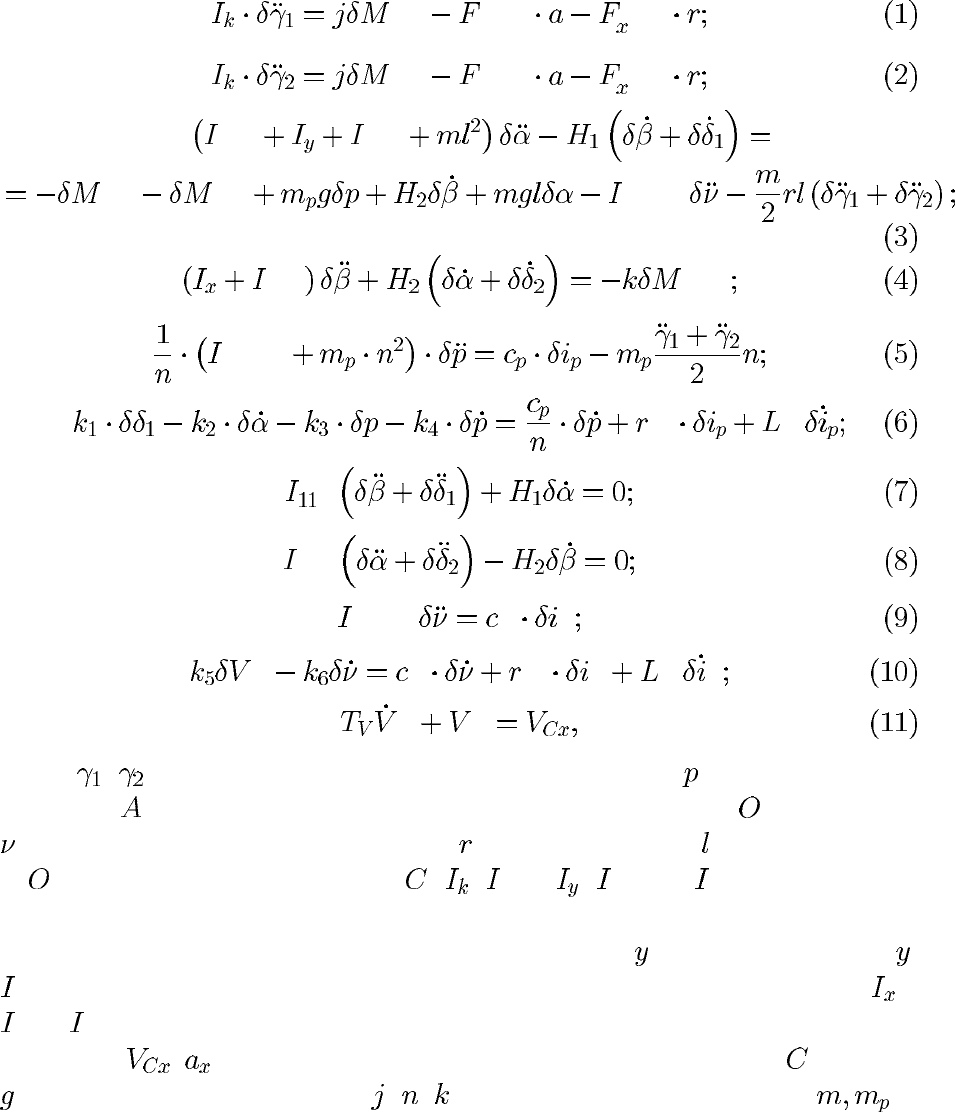
Линеаризованная математическая модель движения ОКТП, например
для случая движения с горизонтированной платформой по прямой с по-
стоянным ускорением, может быть представлена в виде:
дв1
zn1 n1
дв2
zn2 n2
РАy
yГP
дв1 дв2 MAXy
xГР
дв.ст
рот дв
я1 я1
Г
22Г
MAXy
м м
из м
я2
м
я2
м
из из
Здесь , — углы поворота первого и второго колёс; — смещение цен-
тра масс
балансировочного груза относительно центра платформы;
— угол поворота ротора маховика; — радиус колеса; — расстояние от
т.
до центра масс платформы ; ,
РАy
, ,
МАХy
,
рот дв
— моменты
инерции колеса, рамы, платформы, ротора маховика, ротора двигателя гру-
за относительно их главных осей, совпадающих с
или параллельных ;
iiГ
— моменты инерции гироскопов относительно их осей прецессии; и
xГР
,
yГР
— моменты инерции платформы и груза относительно их глав-
ных осей;
, — проекции линейной скорости и ускорения т. на ось x;
— ускорение силы тяжести; , , — передаточные отношения; —
123
массы платформы и груза; — сила сцепления с рабочей поверхно-
стью;
- нормальная реакция рабочей поверхности; — продольный
снос нормальной реакции рабочей поверхности;
двi
— момент, развива-
емый приводным двигателем;
p м
— токи в обмотках якорей двигателей
груза и маховика;
я1
,
я2
и
я1
,
я2
— активные сопротивления и индук-
тивности якорей двигателей груза и маховика;
,
м
— коэффициенты ЭДС
и момента двигателя груза и маховика;
дв.ст
— момент, развиваемый дви-
гателем стабилизации;
, , , и , — коэффициенты управления
двигателем груза и двигателем маховика;
.
Невозмущаемость ОКТП силами инерции. При движении ОКТП с ли-
нейным ускорением (
), а также при вираже ( ) возникают силы инерции
(
и
ЦБ
), порождающие приложенные к платформе воз-
мущающие моменты
ИН
и
ЦБ
(рис. 2). Для решения задачи компен-
сации этих возмущений может быть использован подход, предложенный
А. Ю. Ишлинским [4]. Суть подхода заключается в следующем: на плат-
форму дополнительно устанавливается маховик, управляя угловой скоро-
стью вращения которого можно скомпенсировать возмущающие воздей-
ствия при поступательном ускоренном движении и движении на вираже,
оказывая на платформу ОКТП реактивное и гироскопическое воздействия
соответственно. При этом угловая скорость вращения маховика
должна
формироваться следующим образом:
MAXy
а реактивный и гироскопический компенсирующие моменты, приложен-
ные к платформе, имеют вид
MAXy MAXy
МАХгир х MAXy
Синтез канала стабилизации платформы в плоскости горизонта во-
круг оси колёсной пары. Стабилизация платформы в плоскости гори-
зонта по каналу производится балансировочным грузом , перемеще-
ние которого
осуществляется двигателем постоянного тока (на рис. 1, 2
не показан). Динамика процесса перемещения описывается уравнениями
(5) и (6), причём левая часть уравнения (6) определяет закон формирования
управляющего напряжения, поступающего на обмотку якоря двигателя. За-
дача параметрического синтеза заключалась в выборе коэффициентов
,
, , таким образом, чтобы при заданном уровне возмущающих мо-
ментов сил инерции обеспечить потребное время переходного процесса и
124
Рис. 2. Схема обеспечения невозмущаемости платформы ОКТП
перерегулирование по при естественных ограничениях на величину мак-
симального перемещения груза. При решении задачи использовался блок
Nonlinear Control Design (входящий в состав программного пакета Matlab,
Simulink). Характерные переходные процессы представлены на рис.3и4.
Анализ достижимого уровня компенсации воздействий моментов сил
инерции. Точность практической реализации соотношения (12) ограни-
чена инерционностью измерителя
и исполнительного двигателя ма-
ховика. Динамика процесса формирования потребной скорости вращения
маховика
определяется уравнениями (9) и (10); при этом для обеспечения
невозмущаемости должно выполняться соотношение
MAXy
Задача анализа заключалась в оценке достижимого уровня выполнения
соотношения (12) путём варьирования одного из коэффициентов пары
,
. При решении задачи также использовался блок NCD.
Определено, что рациональным подбором
, можно обеспечить ком-
пенсацию инерционных возмущений до уровня порядка 98% от их номи-
нальных значений.
Характерный переходный процесс по
представлен на рис. 5.
В заключение на основе полученных результатов можно сделать выво-
ды о достаточной эффективности рассматриваемых вариантов построения
125

Рис. 3. Переходной процесс по
Рис. 4. Переходной процесс по
126

Рис. 5. Переходной процесс по при задании ступенчатого входного воздействия по
каналов гироскопической стабилизации и компенсации инерционных воз-
мущений высокоманёвренной двухстепенной ОКТП.
Библиографический список
1. Мартыненко Ю. Г., Формальский А. М. Управление продольным движением одно-
колёсного аппарата по неровной поверхности // Известия РАН. Теория и системы
управления. 2005. №4. С. 165-173.
2. Репников А. В., Сачков Г. П., Черноморский А. И. Гироскопические системы. – М.:
Машиностроение, 1983.
3. Черноморский А. И., Сачков Г. П. Динамическая модель одноосной колесной транс-
портной платформы // Авиакосмическое приборостроение. – М.: Научтехлитиздат,
2006.
4. Ишлинский А. Ю. Механика гироскопических систем. – М.: АН СССР, 1963.
А. А. Афонин, М. В. Карачевцев
Московский авиационный институт (государственный технический университет)
РАЗРАБОТКА И ИССЛЕДОВАНИЕ ГРАВИИНЕРЦИАЛЬНОГО
НАВИГАЦИОННОГО КОМПЛЕКСА (ГНК) ДЛЯ ПРОВЕДЕНИЯ
МОРСКИХ ГРАВИМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ
В рамках актуальной проблемы прецизионных гравиметрических изме-
рений для решения широкого спектра задач в области навигации, геодезии,
127
геологии, геофизики создано большое количество разнообразных грави-
метров, основанных как на статическом, так и на динамическом принципах
измерений. При этом большинство известных типов гравиметров имеют
ряд недостатков, к числу которых относятся: неудовлетворительные массо-
габаритные характеристики, дрейф нуля, слабая помехозащищенность при
работе на подвижном основании, значительное время измерения, узость
амплитудного и частотного диапазонов, невысокие надежность и стабиль-
ность, дороговизна.
На кафедре “Автоматизированные комплексы систем ориентации и на-
вигации” МАИ был предложен принципиально новый подход к гравимет-
рическим измерениям [1-3], основанный на интегрировании разработан-
ного векторного гравиметрического датчика в бесплатформенный навига-
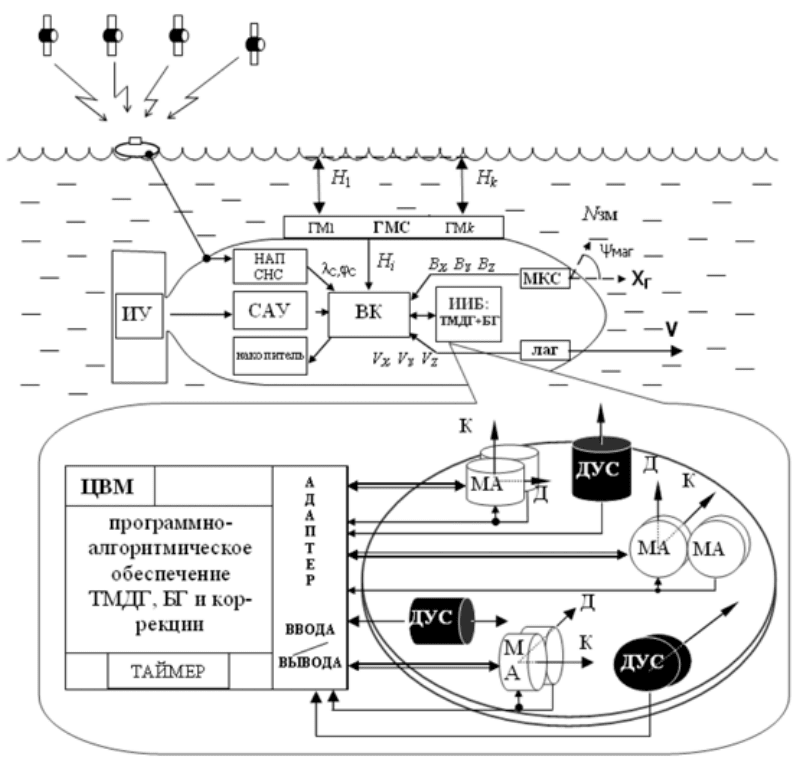
ционный комплекс аппарата-носителя (рис. 1).
Рис. 1. Гравиинерциальный навигационный комплекс малоразмерного подводного
аппарата
На рис. 1: БИНС — бесплатформенная инерциальная навигационная си-
стема, ТМДГ — трехкомпонентный модуляционный динамический грави-
128
метр, ДУС — датчик угловой скорости, МА — маятниковый акселерометр. В
качестве корректирующих устройств используются: глубиномер, лаг, кур-
совая магнитометрическая система, спутниковая навигационная система.
Преимущества данной схемы заключаются в повышении производи-
тельности морских гравиметрических измерений (малоразмерный подвод-
ный аппарат обладает большей маневренностью и скоростью по сравне-
нию с кораблями, используемыми в настоящее время в морской грави-
метрической съемке). При этом сохраняются точностные характеристики
и снижаются затраты на проведение детализации высокочастотного спек-
тра гравитационных аномалий, снижается острота проблемы вертикальных
ускорений, появляется возможность проведения гравиметрической съемки
на мелководье и в высоких широтах, существенно уменьшаются затраты
на осуществление площадных съемок.
Измерителем ускорения силы тяжести (УСТ) в ГНК является векторный
бесплатформенный трехкомпонентный модуляционный динамический гра-
виметр (ТМДГ), строящийся на основе прецизионных малогабаритных ма-
ятниковых акселерометров [1]. Использование трех широкодиапазонных
двухкомпонентных измерителей кажущегося ускорения, построенных по
дифференциальной схеме, с малыми порогом чувствительности и нели-
нейностью характеристики обуславливает наличие информационной из-
быточности, позволяющей проводить измерения кажущегося ускорения,
включающего УСТ, с крайне малыми, по сравнению с традиционными
бортовыми гравиметрами, дрейфом нуль-пункта, динамическими, а также
температурными погрешностями [2]. При этом появляется возможность
исключить гиростабилизированную платформу из состава гравиинерци-
ального комплекса (см. рис. 1).
На базе ММДГ построен векторный ТМДГ. Благодаря его широким
амплитудному и частотному диапазонам появилась возможность отказать-
ся от использования гиростабилизированной платформы: вертикаль места
при этом определяется аналитически. Наличие информационной избыточ-
ности по каждой из осей связанного с основанием базового трехгранни-
ка позволило компенсировать ряд наиболее существенных погрешностей:
температурные и динамические, а также дрейф нуль-пункта [2].
На базе интегрированной системы БИНС-ТМДГ был разработан ГНК
аппарата-носителя [3]. При этом появились возможности решения задач
недорогой прецизионной гравиметрической съемки для решения ряда хо-
зяйственных, научных и оборонных вопросов, а также открылись допол-
нительные возможности для решения задач коррекции работы БИНС и
навигации по геофизическим полям.
129
Для анализа работы ГНК на борту малоразмерного подводного аппара-
та (МПА) необходимо учитывать влияние морского волнения на движение
МПА, а также дополнительные погрешности, вносимые в работу подси-
стем ГНК и также обусловленные действием морского волнения.
С этой целью была предложена математическая модель морского вол-
нения (представлено в виде совокупно действующих регулярного и нере-
гулярного волнений). На ее основе был проведен анализ, математическое
и имитационное моделирование силовых воздействий на МПА. Далее, с
учетом параметров относительного движения МПА в водной среде, про-
анализировано воздействие морского волнения на траекторию движения
МПА, проведено математическое и имитационное моделирование движе-
ния управляемого МПА в водной среде в условиях морского волнения.
По итогам моделирования работы систем автоматизированного управле-
ния (САУ) МПА были получены изменения линейных и угловых координат
МПА как результат силового воздействия морского волнения на аппарат-
носитель.
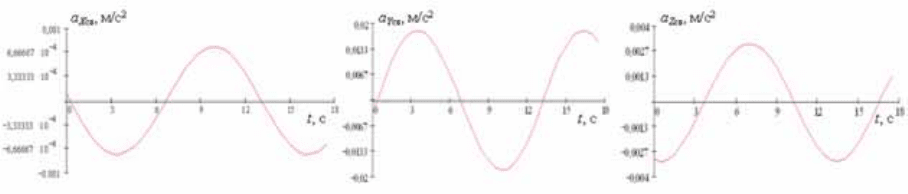
Далее был проведен анализ, математическое и имитационное модели-
рование работы ГНК на борту МПА в условиях морского волнения, в ходе
которого были получены составляющие ускорений (рис. 2), измеряемых
ЧЭ ГНК и обусловленных действием морского волнения.
Рис. 2. Составляющие ускорения, испытываемого ЧЭ ГНК на борту МПА
и обусловленного морским волнением
Полученные результаты показали значительное снижение возмущаю-
щего воздействия морского волнения с увеличением глубины погружения
МПА (рис. 3).
В качестве базового, в работе рассмотрен вариант построения ГНК в
составе БИНС - ТМДГ c коррекцией от глубиномерной системы (ГМС),
акселерометрического построителя вертикали (АПВ) и магнитометриче-
ской курсовой системы (МКС).
В ходе анализа работы комплекса, кроме типичных погрешностей в
работе подсистем ГНК, дополнительно учитывались погрешности, порож-
даемые влиянием морского волнения. Имитационное моделирование рабо-
ты комплекса выявило возможность определения параметров ориентации
130