Коломитцев А.Д., Чернікова Л.В. Теорія автоматичного керування. Конспект лекцій
Подождите немного. Документ загружается.


Рисунок 5.15 – ЛАЧХ и ЛФЧХ при введении
параллельного интегрирующего звена
Рисунок 5.16 – ЛАЧХ и ЛФЧХ при введении
параллельного дифференцирующего звена
Рисунок 5.17 – Параллельные корректирующие устройства
в виде местных обратных связей
Основные виды корректирующих местных ОС:
0
0
L
m
1
1 / T
1
- 9 0
0
0
L
m
1
1 / T
1
- 9 0
g ( t )
x ( t )
.
0 1
o
.
y ( t )
120
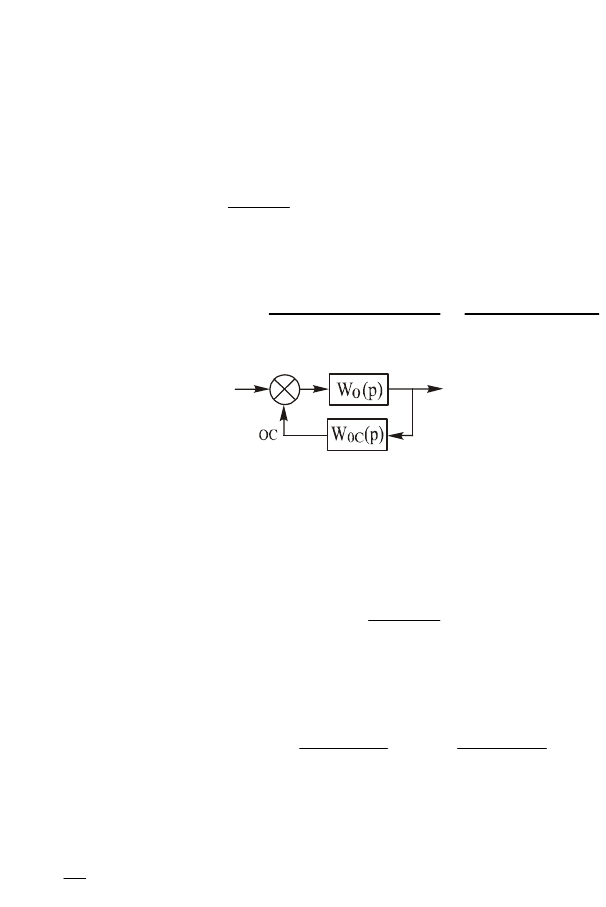
- жесткая ОС
ococ
KW
;
- инерционная жесткая ОС
1/ pTKpW
ocococ
;
- гибкая ОС
pKpW
ococ
;
- инерционная гибкая ОС
)1/( pTpKpW
ocococ
.
Рассмотрим несколько примеров использования местных ОС в качестве
корректирующих устройств.
Положительная жесткая ОС, охватывающая апериодическое звено
(инерционное) с
1
)(
Tp
K
pW
o
(рис. 5.18).
Тогда общая передаточная функция:
ocooc
o
KKTp
K
pWpW
pW
pW
11
)(
Рисунок 5.18 – Корректирующее устройство в виде
положительной жесткой обратной связи
или
1
1
1
pT
K
pW
,
где
oc
KK
K
K
1
1
,
oc
KK
T
T
1
1
.
Значит положительная жесткая ОС может увеличивать коэффициент усиления,
но одновременно увеличивается постоянная времени, т.е. инерционность звена, и при
K
K
oc
1
звено становится неустойчивым.
Отрицательная жесткая ОС, охватывающая апериодическое звено дает общую
перелаточную функцию:
x
x
x
1
2
.
121
111
)(
2
2
pT
K
KKTp
K
pWpW
pW
pW
ococo
o
,
где
oc
KK
K
K
1
2
,
oc
KK
T
T
1
2
.
Следовательно, жесткая отрицательная ОС уменьшает инерционность звена,
улучшая этим качество переходного процесса и может оказать стабилизирующее
действие (подобно введению производной), превращая неустойчивую замкнутую
систему в устойчивую. Уменьшение коэффициента усиления может быть
скомпенсировано за счет других звеньев системы.
При охвате отрицательной жесткой ОС интегрирующего звена, т.е. при
p
K
pW
o
,
ococ
KW
, получим:
11
)(
3
3
pT
K
KKp
K
pWpW
pW
pW
ococo
o
,
где
oc
K
K
1
3
,
oc
KK
T
1
3
.
Т.е. под действием жесткой обратной связи теряются интегрирующие свойства
звена, и оно превращается в инерционное с
3
K
, определяемым целиком ОС.
3
T
будет мала при большом K звена.
Далее будут рассматриваться только отрицательные ОС.
Инерционная жесткая ОС, охватывающая интегрирующее звено.
При этом
.
1
;
pT
K
pW
P
K
pW
oc
oc
oco
Тогда
,
1
11
5
22
4
4
2
pTpT
pTK
KKppT
pTK
pW
oc
ococ
oc
где
.
1
,,
1
5
2
44
ococ
oc
oc
KK
T
KK
T
T
K
K
122

Интегрирующее звено превращается в звено второго порядка с введением
производной.
4
K
и интенсивность введения производной
oc
T
целиком
определяется ОС, и первичный
K
влияет на новые постоянные
4
T
и
5
T
,
которые будут тем меньше, чем больше
K
. Поэтому при большом
K
охват
интегрирующего звена инерционной жесткой ОС эквивалентен усилительному звену
с введением производной. При этом
.
1
oc
oc
K
pT
pW
Отсюда видно позитивное влияние инерционной ОС на качество переходного
процесса в системе в целом.
Гибкая ОС. При охвате его колебательного звена, т.е
pKW
pTTpT
K
pW
ococo
,
12
21
22
2
имеем
,
12
23
22
2
pTTpT
K
pW
где
.
2
,22
2
132123
T
KK
TTpKKpTTpTT
oc
oc
При этом увеличивается демпфирующее свойство колебательного звена (
3
T
p
>p
1
T
), причем не меняется коэффициент усиления
K
. Процесс становится менее
колебателеным и может привратится в апериодический (при
1
3
T
).
Охват апериодического звена гибкой ОС увеличивает только его инерционность.
При охвате инерционного интегрирующего звена гибкой ОС
pKpW
Tpp
K
pW
ococo
;
1
имеем
,
11
1
1
pTp
K
pKKTpp
K
pW
oc
123
где
,
1
,
1
11
ococ
KK
K
K
KK
T
T
т.е сохраняется то же интегрирующеу звено, но с уменьшеной инерционностью.
Инерционная гибкая ОС. При охвате инерционного интегрирующего звена, т.е:
,
1
,
1
pT
pK
pW
Tpp
K
pW
oc
oc
oco
имеем
,
1
1
1
1
1
22
2
1
2
pTpTp
pTK
KKpTTpTTp
pTK
pW
oc
ocococ
oc
где
,
1
2
2
oc
oc
KK
TT
T
,
1
1
oc
KK
K
K
.
1
1
oc
oc
KK
TT
T
При сохранении интегрирующего свойства звена получается эффект введения
производной, т.е интегрирующее звено становится изодромным, и новые
2
T
и
1
T
могут быть малыми за счет большого
K
. В последнем случае имеем:
.
1
,
1
1
pK
pT
pW
K
K
oc
oc
oc
5.4 Корректирующие устройства по внешнему воздействию
Инвариантность [1,c.263-268; 2,c.139-142]
Основной принцип автоматического управления и регулирования состоит в
формировании управляющего сигнала по величине ошибки х (с использованием
интегралов и производных от х). Если же вводится корректирующее устройство по
внешнему воздействию, то получается комбинированное управление – по ошибке и
по внешнему воздействию.
Путем введения коррекции по внешнему воздействию удается теоретически
свести величину установившейся ошибки к нулю при любой форме внешнего
124
воздействия. Это свойство называется – инвариантностью системы по отношению к
внешнему воздействию.
5.4.1 Корректирующее устройство по задающему воздействию
При этом дополнительно к управлению по ошибке х(t) вводится управление по
задающему воздействию g(t) через некоторую передаточную функцию
)( pW
к
.
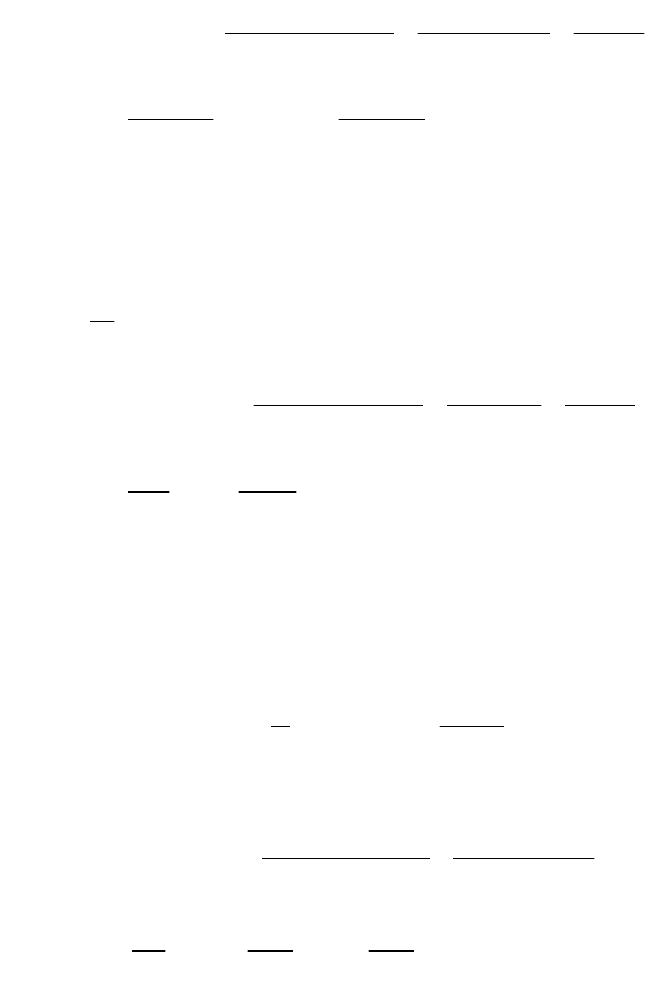
Структурная схема системы с комбинированным управлением будет выглядеть, как
показано на рис. 5.19.
Рисунок 5.19 – Введение управления по задающему воздействию
Тогда выходная величина выразится в виде:
tgpW
pW
pW
ty
к
o
o
)(1
)(1
)(
)(
. (5.1)
Эквивалентная передаточная функция замкнутой системы для регулируемой
величины будет равна:
)(1
)(1
)(
)( pW
pW
pW
pФ
к
o
o
э
,
а
tgpФty
э
.
В случае отсутствия регулирования по задающему воздействию, т.е. при
0)( pW
к
, регулируемая величина связана с g(t) через передаточную функцию
замкнутой системы:
g ( t )
x ( t )
y ( t )
..
125

tg
pW
pW
tgpФty
o
o
)(1
)(
. (5.2)
Из сопоставления формул (5.1) и (5.2) видно, что введение регулирвоания по
задающему воздействию не меняет характеристического уравнения системы, т.к.
знаменатели
)( pФ
э
и
)( pФ
одинаковы. Это означает, что не будет нарушаться
не только условия устойчивости, но и сохраняется оценка качества переходного
процесса, базирующаяся на использовании корней характеристического уравнения.
Эквивалентная передаточная функция по ошибке будет равна:
)(1
)()(1
)(1)(
pW
pWpW
pФpФ
o
oк
ээх
.
Отсюда можно найти условие полной инвариантности системы регулирования
по задающему воздействию, при котором установившаяся ошибка будет равна нулю
при любой форме g(t) (
)( pФ
э
=1, а
0)( pФ
эх
в этом случае):
)(
1
)(
pW
pW
o
к
.
САР является инвариантной по отношению к возмущающему воздействию, если
после завершения переходного процесса, определяемого начальными условиями,
регулируемая величина и ошибка системы не зависят от этого воздействия.
Структурная схема системы с комбинированным управлением может быть
заменена эквивалентной ей обычной схемой САР, работающей по ошибке x(t), с
эквивалентной передаточной функцией разомкнутой системы, как показано на рис.
5.20.
)()(1
)(1)(
)(1
)(
pWpW
pWpW
pФ
pФ
pW
oк
кo
э
э
э
.
Рисунок 5.20 – Эквивалентная схема системы с управлением
по задающему воздействию
В некоторых случаях сигнал по задающему воздействию может вводится в
некоторую точку внутри канала регулирования (рис. 5.21).
g ( t )
x ( t )
y ( t )
.
126
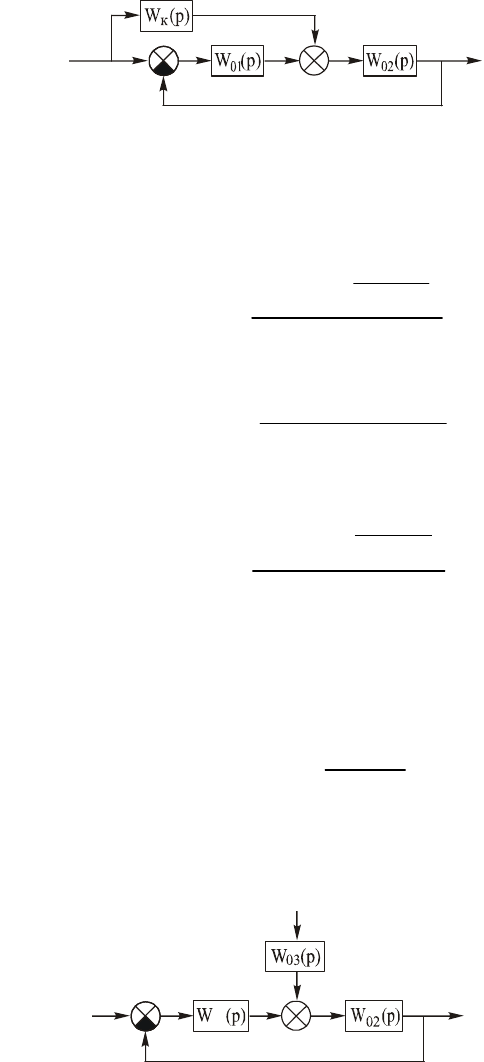
Рисунок 5.21 – Возможный вариант схемы системы
с управлением по задающему воздействию
В этом случае
)(1
)(
)(
1)(
)(
1
pW
pW
pW
pW
pФ
o
к
э
;
)(1
)()(1
)(
2
pW
pWpW
pФ
oк
xэ
;
)()(1
)(
)(
1)(
)(
2
1
pWpW
pW
pW
pW
pW
oк
o
к
э
,
где
)()()(
21
pWpWpW
oo
- передаточная функция разомкнутой
системы (в случае
0)( pW
к
).
Условие полной инвариантности в этом случае:
)(
1
)(
2
pW
pW
o
к
.
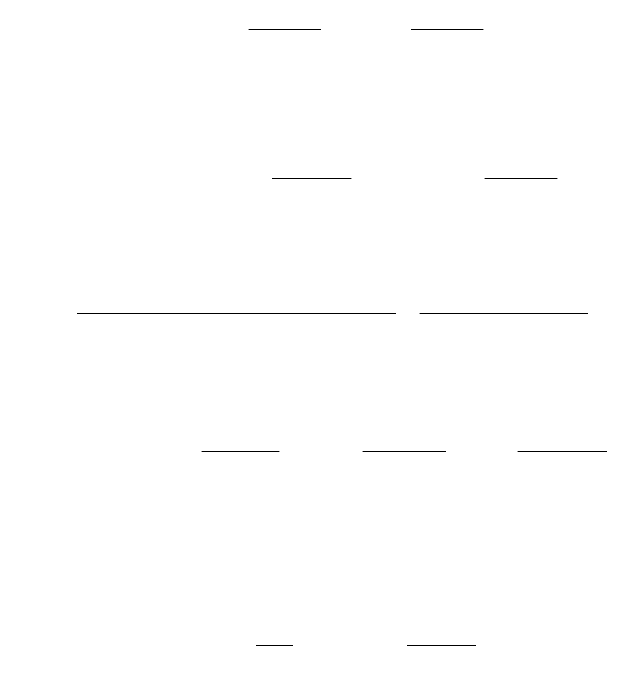
5.4.2 Корректирующие устройства по возмущению
Пусть задана схема системы с возмущающим воздействием (рис. 5.22).
g ( t )
x ( t )
y
y
..
g ( t )
f ( t )
y ( t )
.
0 1
127

Рисунок 5.22 – Исходная схема системы с возмущающим воздействием
Введем корректирующее устройство
)( pW
к
, входом которого является
возмущающее воздействие f (рис. 5.23).
Рисунок 5.23 – Введение корректирующего устройства
по возмущающему воздействию
Тогда передаточная функция замкнутой системы для регулируемой величины
y(t) по f(t) равна:
)()(1
)()()()(
)(
21
132
pWpW
pWpWpWpW
pФ
oo
oкoo
f
.
Условие полной инвариантности по f(t) имеет вид:
)(
)(
)(
1
3
pW
pW
pW
o
o
к
.
САР является инвариантной по отношению к возмущающему воздействию, если
после завершения переходного процесса, определенного начальными условиями,
регулируемая величина и ошибка системы не зависит от этого воздействия.
5.5 Неединичные главные обратные связи
Этот тип корректирующего устройства применяют для уменьшения ошибки,
вызванной задающим воздействием в замкнутой системе регулирования.
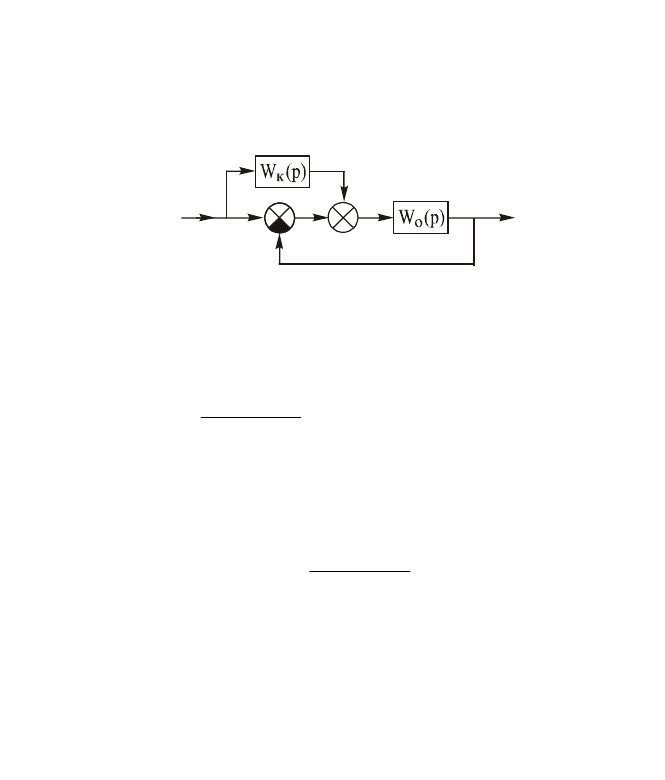
Введем в главную ОС, которая обычно равна единице, устройство с
передаточной функцией
)( pW
к
(рис. 5.24). В этом случае на входе системы g(t)
сравнивается не непосредственно с выходной величиной y(t), как обычно, а с
некоторой величиной z(t).
g ( t )
f ( t )
y ( t )
.
.
0 1
128
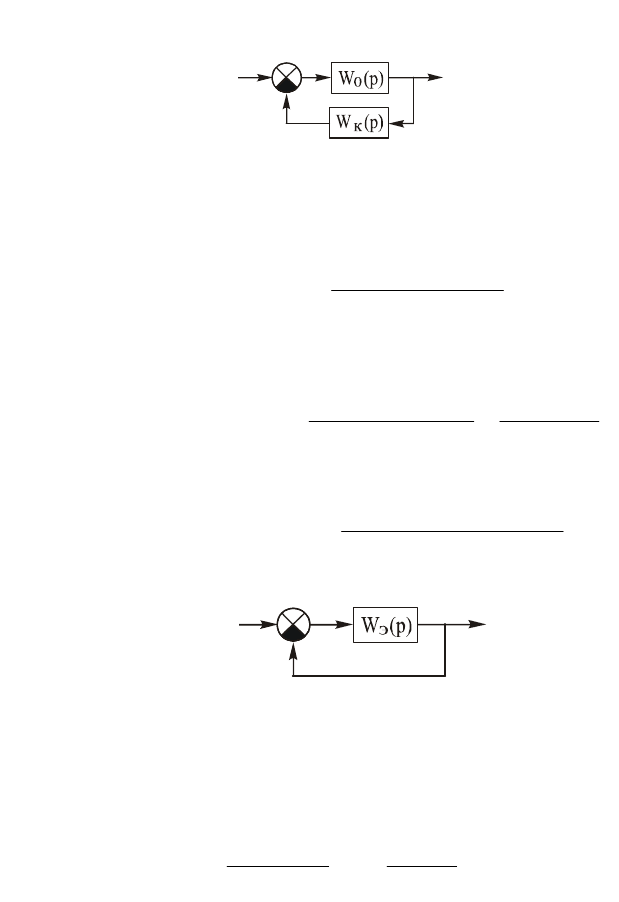
)()()( typWtz
к
.
Рисунок 5.24 – Введение неединичных главных обратных связей
Тогда
)(
)()(1
)(
)( tg
pWpW
pW
ty
кo
o
.
Эквивалентная передаточная функция замкнутой системы (рис. 5.25):
)(1
)(
)()(1
)(
)(
pW
pW
pWpW
pW
pФ
э
э
кo
o
э
;
)()(11
)(
)(
pWpW
pW
pW
oк
o
э
.
Рисунок 5.25 – Эквивалентная схема замкнутой системы
с неединичной главной обратной связью
Для полной инвариантности системы требуется
)()( tgty
, т.е.
1)( pФ
э
. Отсюда:
)(
1
1
)(
1)(
)(
pWpW
pW
pW
oo
o
к
. (5.3)
.
g ( t )
y ( t )
z ( t )
.
g ( t )
y ( t )
y ( t )
x ( t )
129