Кашкин В.Б., Сухинин А.И. Дистанционное зондирование Земли из космоса. Цифровая обработка изображений
Подождите немного. Документ загружается.

ний. Спектр такого изображения /^(и, v)= F(u, v) K(u, v), где F(u, v)
—
спектр исходного изображения, К(и, v) — коэффициент передачи оп-
тической системы, соответствующей ФРТ на рис. 3.10. Примеры рас-
фокусированных изображений приведены на рис. 3.12. Чтобы опреде-
лить F(u, v) по известным F
{
(u, v) и К (и, v), необходимо умножить
1 1 1
I
1 1 200
1
1 I
1
I 1
а)
б) в) г)
'
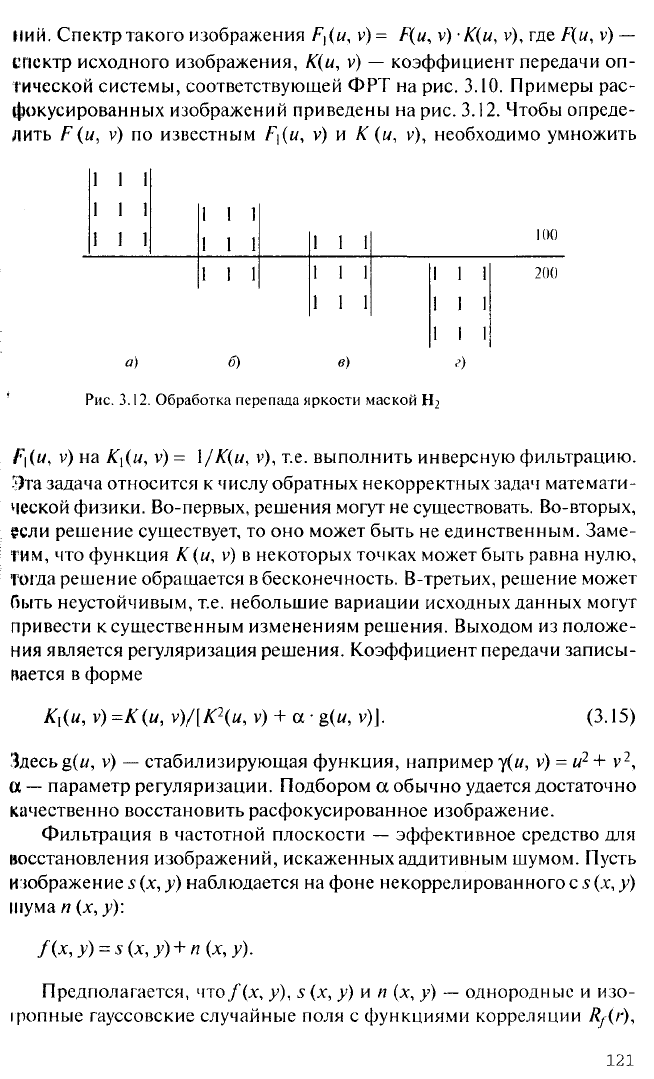
Рис. 3.12. Обработка перепада яркости маской
Н
2
F\(u,
v) на К\{и, v)
—
\/К(и, v), т.е. выполнить инверсную фильтрацию.
Эта задача относится к числу обратных некорректных задач математи-
ческой физики. Во-первых, решения могут не существовать. Во-вторых,
если решение существует, то оно может быть не единственным. Заме-
тим, что функция К(и, v) в некоторых точках может быть равна нулю,
тогда решение обращается в бесконечность. В-третьих, решение может
быть неустойчивым, т.е. небольшие вариации исходных данных могут
привести к существенным изменениям решения. Выходом из положе-
ния является регуляризация решения. Коэффициент передачи записы-
вается в форме
К
х
{и,
v) =K(u, v)/[K
2
(u, v) + a
•
g(w, v)J. (3.15)
Здесь
g(w,
v)
—
стабилизирующая функция, например y(w, v) = и
2
+ v
2
,
а
—
параметр регуляризации. Подбором а обычно удается достаточно
качественно восстановить расфокусированное изображение.
Фильтрация в частотной плоскости — эффективное средство для
восстановления изображений, искаженных аддитивным шумом. Пусть
изображение
5
(х, у) наблюдается на фоне некоррелированного с s (х, у)
шума п (х, у):
f(x,y)
=
s(x,y)+n(x,y).
Предполагается, что/(х, у), s (х, у) и п (х, у) — однородные и изо-
фопные гауссовские случайные поля с функциями корреляции Щ(г),
1 1 1
121
3.3.3. Линейная локальная фильтрация
На практике глобальная фильтрация применяется редко. Чаще ис-
пользуют локальную фильтрацию, когда интегрирование и усредне-
ние проводятся не по всей области определениях
и
у, а по сравнитель-
но небольшой окрестности каждой точки изображения. При этом
функция рассеяния точки имеет ограниченные
размеры.
Достоинством
такого подхода является хорошее быстродействие.
При обработке растровых изображений, которые состоят из от-
дельных пикселов, интегрирование заменяют суммированием. Линей-
ное преобразование
в
случае локальной фильтрации принимает вид
Si/ ~Zj
a
k\fi+kJ+\'
D
суммирование ведется по некоторой окрестности
Л
точки
(i,j);
а
а
—
значения ФРТ в этой окрестности. Яркости пикселов/ в этой точке
и
в ее
окрестности умножаются на коэффициенты о
й
, преобразованная
яркость
(/',у')-го
пиксела
есть
сумма этих произведений. Обычно набор
коэффициентов а
м
представляют в виде прямоугольной матрицы (ма
ски),
например размерности 3x3:
а
и
а
п
0,3
«21 °22 °23 •
fl
31
G
32
а
33
Элементы матрицы удовлетворяют условию пространственной ин
вариантности, поэтому о,
|
= a
li
=
a
3i
=
а-ц,
а
\2
= а
и =
°23 =
°32-
Фильтрация осуществляется перемещением слева направо (или
сверху вниз) маски на один пиксел. При каждом положении апертуры
производятся упомянутые операции: перемножение весовых множите
лей
а
к
\
с
соответствующими значениями яркостей исходного изображс
ния и суммирование произведений. Полученное значение присваива
ется центральному
(/,у')-му
пикселу, которое обычно делится на заранее
заданное число ^(нормирующий множитель). Маска содержит нечеч
ное число строк
и
столбцов, чтобы центральный элемент определялся
однозначно.
Рассмотрим некоторые фильтры, сглаживающие шум. Пусть мае
ка размером 3x3 имеет вид
Н
124
н,
1
2 1
1
1 1
Тогда после фильтрации яркость
(/,./)-го
пиксела
\ Ru
=
VWfi-\,j-\
+fi-ij+f
U
-\
+
fi.j-\
+
2
fiJ
+
fun
+
f»i.j-i
+У/+1.У
+
|+//+l.y+l)-
Хотя коэффициенты
а
к1
можно выбрать из среднеквадратического
Или иного условия близости не искаженного шумом
s,•__,-
и
преобразован-
ного g,-jизображений, обычно их задают эвристически. Приведем еше
\ некоторые матрицы шумоподавляющих фильтров:
н
2
=-
9
1 1 1
1 1 1
1 1 1
Н,=-
16
2 1
2 4 2
2 1
Н
4
=
1
2
1 2
1
2 1
2
1 2
У
фильтров Н|-Н
4
нормирующие множители А"подобраны так, что-
|§ы не происходило изменения средней яркости обработанного изобра-
жения. Наряду с масками 3x3 используются маски большей размерно-
вти,
например 5x5, 7x7 и
т.
п.
В
отличие от фильтра Н
2
, у фильтров Н
ь
Hi,
H4 весовые коэффициенты на пересечении главных диагоналей ма-
трицы больше, чем коэффициенты, стоящие на периферии. Фильтры Н
ь
\ Hj, H
4
дают более плавное изменение яркости по изображению, чем Н
2
.
Пусть отсчеты неискаженного изображения мало меняются в пре-
делах маски, а отсчеты аддитивного шума случайны и независимы или
(рлабо зависимы со статистической точки зрения. В этом случае меха-
низм подавления шума с использованием приведенных фильтров состо-
ит в том, что при суммировании шумы компенсируют друг друга. Эта
Компенсация будет происходить тем успешнее, чем большее число чле-
нов в сумме, т.е. чем больше размер (апертура) маски. Пусть, например,
[Используется маска Nx N, в пределах ее неискаженное изображение
Имеет постоянную яркость/ шум
—
аддитивный, с независимыми зна-
I Чениями отсчетов n
ki
,„,
средним значением ц
=
0 и дисперсией а
2
в пре-
| Делах маски (такой шум называют белым). Отношение квадрата ярко-
Г
сти (/, у')-го пиксела к дисперсии шума, т.е. отношение сигнал-шум,
г
рИИ11о/
2
/о
2
.
125
Рассмотрим, например, маску типа Н
2
:
| /V N j N N
Sij=~7^1I,(f
+
"k,J=f
+
T^l X"*, »•
/V
A
= lm=l /V *=|м=1
Средний квадрат яркости равен/
2
, средний квадрат интенсивнос-
ти шума
] N N ] N N N N
—г
У У
<
«i
,„>+—г
,4 •£-* 4-1 *. '"
л
,4
/V * = |;п=| /V *= | „,= \
ч
=1 р=\
Двойная сумма, равная
o
2
/N
2
,
соответствует к
=
р, m
=
q. Четырехкра
1
ная сумма равна нулю, так как отсчеты шума при к*р, т
*•
ц независи
мы:
<п
к
,„п
р
q
>
= 0. Таким образом, в результате фильтрации отношение
сигнал-шум становится равным N
2
f
2
/a
2
,
т.е.
возрастает пропорционаш.
но площади маски. Отношение яркости (i,J)-ro пиксела неискаженно
го изображения к среднеквадратическому отклонению шума возраста
ет пропорционально N
2
. Следовательно, использование маски
3
х
3
в среднем повышает отношение сигнала к шуму в 9 раз.
При импульсной помехе механизм подавления состоит в том,
ч
m
импульс «расплывается» и становится малозаметным на общем фоне
Однако часто в пределах апертуры значения полезного изображе-
ния все же изменяются заметным образом. Это бывает, в частности,
KOI
да в пределы маски попадают контуры. С физической точки зрения во
Н|— Н
4
являются фильтрами нижних
частот
(усредняющими фильтр;!
ми),
подавляющими высокочастотные гармоники и шума, и неискажен
ного изображения. Это приводит не только к ослаблению шуми
но и к размыванию контуров на изображении. Пусть, например, на изо
бражении, обрабатываемом маской Н
2
, имеется перепад яркости oi
100 к 200 (см. рис. 3.12).
Если маска находится в положении а, когда в ее пределы попадай
> i
только значения яркости/=100, то#,
у
= 9
•
100/9 = 100. Если маска на
ходится в положении г, то
g,j
= 9
•
200/9 =
200.
Таким образом,
в
этих ел \
чаях яркость не изменяется.
Если же маска занимает положение б, то g/j= (6
•
100 + 3
•
200)/9
=
133.
Для положения маски в имеем gjj=(3
•
100 + 6
•
200)/9= 167. Cm
довательно, резкий профиль перепада яркости 100—200 стал сглажен
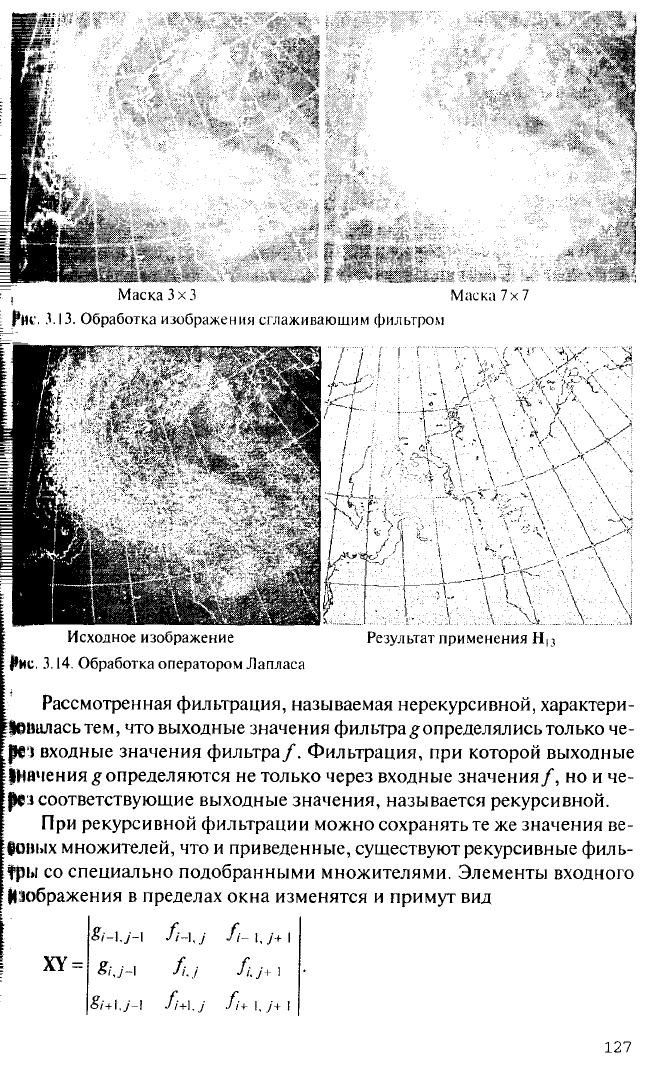
ным: 100—133—166—200. Результат применения фильтра Н
2
с маскам
и
размерами 3x3 и 7x7 можно видеть на рис. 3.13 (оригинал приведен п
рис.
3.14).
126
.'1
£&.!••
1-К-ЧА
?••"->,
~, Маска 3x3 Маска 7x7
p№. 3.13. Обработка изображения сглаживающим фильтром
l
,-1
. 1
1
Г V
t~
Ч>
l
v
К
\ —
I
I
' \
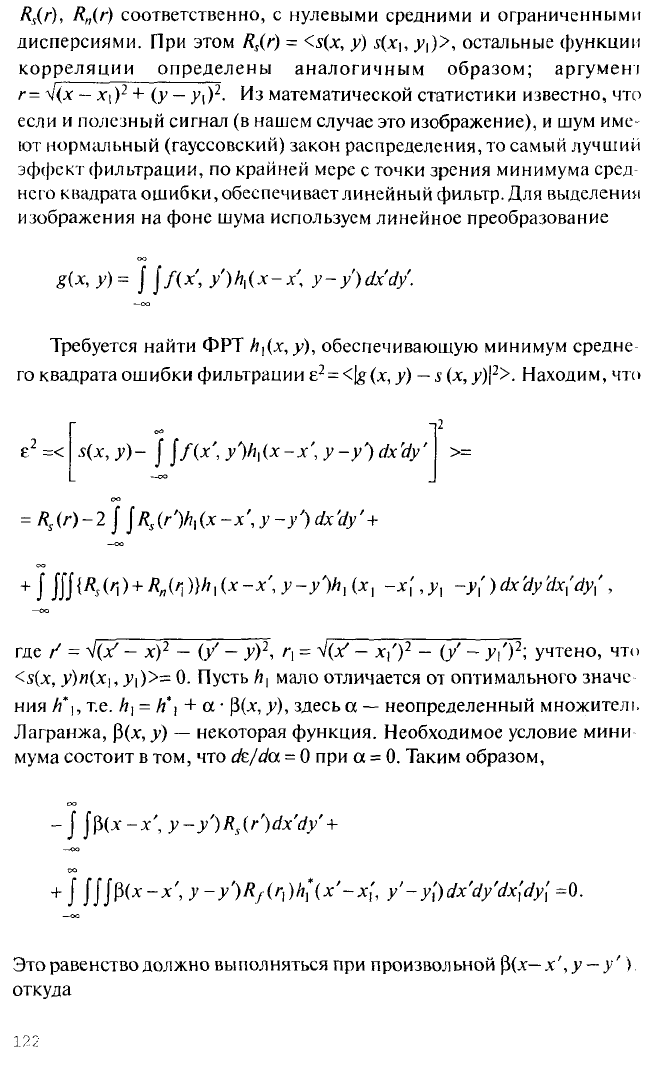
Исходное изображение
Эик. 3.14. Обработка оператором Лапласа
\ \ Л
Результат применения Н,
3
Рассмотренная фильтрация, называемая нерекурсивной, характери-
зовалась
тем,
что выходные значения фильтра^определялисьтолько че-
}ч
входные значения фильтра/. Фильтрация, при которой выходные
Значения gопределяются не только через входные значения/, но и че-
рез соответствующие выходные значения, называется рекурсивной.
При рекурсивной фильтрации можно сохранять
те
же значения ве-
Юных
множителей, что
и
приведенные, существуют рекурсивные филь-
|ры со специально подобранными множителями. Элементы входного
Йюбражения в пределах окна изменятся и примут вид
XY =
Si-\J-\
fi-\,j fi-\,j+\
o/,y-l
У/. /' У/, j+ 1
6/+l,y-i
У/+1,у /(+ i, j+ i
127
R
s
(r),
R„(r)
соответственно, с нулевыми средними и ограниченными
дисперсиями. При этом
R
s
(r)
=
<s(x,
у)
s(X],
y\)>, остальные функции
корреляции определены аналогичным образом; аргумет
r= V(x - х\)
2
+
\у
—
у\)
2
. Из математической статистики известно, что
если и полезный сигнал (в нашем случае это изображение),
и
шум име-
ют нормальный (гауссовский) закон распределения, то самый лучший
эффект фильтрации, по крайней мере с точки зрения минимума сред
него квадрата ошибки, обеспечиваетлинейный
фильтр.
Для выделения
изображения на фоне шума используем линейное преобразование
g(x, y)= J ff(x, y')h\(x-x\ у
~
у)
dx'dy.
Требуется найти ФРТ h
x
(x, у), обеспечивающую минимум средне
го квадрата ошибки фильтрации
г
2
=
<\g(x,
у)
—s
(x,
у)\
2
>-
Находим, что
г
2
=<
-i2
s(x, у)- f jf(x', y
f
)h
l
(x-x',y-y')
dx'dy'
>=
= R
s
(r)~2 J
JR
5
(r')ht(x
-x', у -/) dx'dy'+
+ j
j\j{R
s
(r
]
)
+
R„(r
l
)}
f]
\(
x
-
x
'>y-y')
h
\(
x
i
-
Х
'\,У\
-у[) dx'dy'dx( dy( ,
где /
= V(3?
- x)
1
- (/ - y)
2
,
r
x
=
А(х"
- x{)
2
- (/ - y{)
2
\ учтено, что
<s(x,
у)и(л:,,
>
J
i)>=
0. Пусть
Л,
мало отличается от оптимального значе
ния
Л*|,
т.е.
И] =
h*\
+
а
•
р(х, у), здесь а
—
неопределенный множитель
Лагранжа, р(х, у) — некоторая функция. Необходимое условие мини
мума состоит
в
том, что
cfc/da = 0
при а
= 0.
Таким образом,
-jfi(x-x\y-y')R
s
(r')dx'dy'
+
+ j jjffiix-x', y-y')R
f
(r
l
)h
]
*(x'~x'
l
, y'-y[)dx'dy'dx[dy[ =0.
Это
равенство
должно
выполняться при произвольной ${х—х',у
—
у')
откуда
122

-RsW+jJRfir^ix'-x^y'-yOdxfa^O.
(3.16)
f Перейдем от функций корреляции к спектру мощности G(u, v) и от
ФРТ к частотному коэффициенту передачи
К(и,
v). Спектр мощности
= связан с функцией корреляции преобразованием Фурье:
|
G(u,
v) =
J
|Л(г)ехр(-2я/1и(дс -*,)
+v(y
-
У[
)))dxdy
, (3.17)
\ R(r)= \\G(u,v)exv(2ni\u(x-X\)+v(y-y\)\)dudv . (3.17')
(
Подстановка (3.11') и (3.14) при G
f
(u,
v)
= C,(w, v) +
G„(u,
v) в (3.16)
дпет
i
|
-
СДи, v) + AT'(и,
v){G
s
(u,
v)
+
G„(u,
v)]
-
0,
1 вткуда оптимальный коэффициент передачи
1
v*t ч
С
5
(и, v)
=
л
(и,
v)
=
.
(3.18)
|
G
s
(u,v)
+
G
n
(u,v)
I Коэффициент передачи (3.18) обеспечивает минимальный сред-
\
НИИ
квадрат ошибки фильтрации при выделении одного случайного по-
[ ля (сигнала) на фоне другого случайного поля (шума) при условии, что
\ Оба поля
—
однородные и изотропные с гауссовским законом распре-
;
деления значений яркости. Фильтр с таким коэффициентом передачи
(3.18) называется фильтром Винера.
| Когда изображение вначале искажено из-за воздействия некоторо-
|
Го
линейного оператора, а затем на него наложен шум, можно объеди-
\
Нить
функции фильтра Винера
и
инверсного
фильтра.
В
этом случае ко-
- аффициент передачи равен
K
2
(u,v)=\/\\
+ K
l
Hu,v)/K'(u,v)],
где К\(и, v) определяется выражением (3.15) при
а
=
0. Гомоморфный
(обобщенный) линейный фильтр имеет коэффициент передачи
К
3
(и,
v) =
К,
(и,
v)/J\+K
]
2
(u,v)/K'(u,v).
123
Рассмотрим динамику изменения весовых множителей на приме
ре рекурсивного фильтра первого рода с линейной маской размером
в три пиксела. Пусть одномерный низкочастотный шумоподавляк>
щий фильтр имеет весовые множители видаН, =
|1,1,1|/3.
При сдвиге апертуры фильтра на один пиксел вправо значения вы
хода фильтра
g
2
= (gi +/2
+/з)/3.
Подставляя сюда значение
g
]
=
(f
0
+/j ч
+f
2
)/3, можно получить, что весовые и нормирующие множители из
менилисьи приняли видН
2
=
|1,
1, 4, 3|/9. Повторяя проделанное, на
ходим Н
3
=
|1,
1,4, 12, 9|/27, Н
4
=
|1,
1,4, 12, 36,
27|/81.
Если исходные весовые и нормирующий множители низкочасто!
ного фильтра имеют вид H
t
=
|1,
2, 1|/4, то аналогично предыдущему слу
чаю можно получить, что Н
2
= |1, 2, 9, 4|/16, Н
3
- |1, 2, 9, 36, 16 |/6
I
и Н
4
=
|1,
2, 9, 36, 144, 64|/26. Таким образом, весовые и нормирующим
множители рекурсивного фильтра зависят от местоположения маски,
рекурсивный локальный фильтр позволяет учитывать все входные зна
чения фильтруемого изображения, т.е. приближается по своему дейст
вию к глобальному фильтру. Рекурсивный фильтр, вообще говоря
не является пространственно-инвариантным.
Если изображение описывается авторегрессионной моделью
для выделения его из шума можно использовать двумерный филыр
Калмана (ФК), по существу, являющийся вариантом фильтра Винер;!
(ФВ).
Фильтр Винера оптимален при всех допустимых спектрах сигнл
ла и шума, описываемых однородными и изотропными гауссовскими
случайными полями. Как и ФВ, ФК обеспечивает минимальный срел
ний квадрат ошибки фильтрации изображения на фоне шума, но для су
щественно более узкого класса случайных полей. Он оптимален,
KOI
да сигнал имеет экспоненциальную функцию корреляции и спек-ц>
мощности вида G
s
(u, v) =1/[1 + a (w
2
+v
2
)]. При этом спектр мощнос-i
и
шума
G
n
(и, v) = const (такой шум называют белым).
Один из вариантов фильтра Калмана предложил А. Хабибп
Для трехточечной авторегрессионной модели оценка яркости
(/,У)-К'
пиксела, по Хабиби, записывается как
&,У= PI&-IJ+ P2&V-1 - (PlP2 -FV/Jgi-lj-i +
V/jfij,
где Р| и р
2
—
коэффициенты корреляции между соседними элементами
по строке и столбцу, F, v
Lj
— коэффициенты, зависящие от дисперсии
порождающего процесса, дисперсии шума и p
h
p
2
. Очевидно, что н-
рекурсивный фильтр. Фильтр Винера определен в частотной плоское
11
фильтр Калмана
—
в плоскости координат. Фильтр Винера относи ь
128
н числу некаузальиых (см. рис. 2.10, г), поскольку для вычисления пре-
образования Фурье используется вся плоскость координат. Фильтр
Кндмана — каузальный, поскольку для формирования оценки сигна-
ля использует область, показанную на рис. 2.10, б. Отметим, что требо-
; Инине каузальности вступает в противоречие с условием пространствен-
ной инвариантности. Фильтр Винера обеспечивает несколько лучшее
качество фильтрации, так как использует все изображение целиком,
- й ФК
—
только текущий и предыдущие пикселы. Важнейшей особен-
ностью фильтра Калмана является быстродействие, он обеспечивает вы-
Е
Деление изображения на фоне шума в реальном времени. При обработ-
I ке изображений Земли, получаемых со спутников, ФК применяется
|; релко, так как работа в реальном времени, как правило, не требуется.
Линейные фильтры могут не только подавлять шум, но и подчерки-
вай
>
перепады яркости и контуров. Выделение вертикальных перепадов
г (Н'уш
ествляется
дифференцированием по строкам, горизонтальных
—
| по столбцам. Дифференцирование производится в цифровой форме:
| g,\
к
=
А//,
k/Ьх
=f
Lk
-
f
L к
_, (по строкам);
I ft\ t =
А//.
А/АУ
=fi.
к
-fi-хл (по столбцам).
| Здесь Ах =
1 —
приращение вдоль строки, равное
1
пикселу, Ау = I —
| приращение вдоль столбца, также равное
1
пикселу.
Щ Выделение перепадов по диагонали можно получить, вычисляя
= ризности уровней диагональных пар элементов. Для этого используют
\ следующие наборы весовых множителей, реализующих двумерное диф-
1 ференцирование:
север северо-восток восток юго-восток
1
1
-1
1
1
-2
1
-1
-1
,
н
6
=
1
-1
-1
1
1
-2
1
-1
1
.
н
7
=
-1
-1
-1
1
1
-2
1
1
1
,
н
8
=
-1
-1 1
-1
-2 1
1
1 1
юг юго-запад запад северо-запад
-1 -1 -1
1 -2 1
1 1 1
* Ню =
1-1-1
1 -2 -1
1 1 1
,н,,=
1 1-1
1-2-1
1 1 -1
>
Н|
2
=
1 1 1
1-2-1
1-1-1
Название географических направлений говорит об ориентации склона
перепада, вызывающего максимальный отклик фильтра. Сумма весо-
мых множителей масок равна нулю, поэтому на участках изображения
1 постоянной яркостью эти фильтры дают нулевой отклик.
• -1.11111:1 Л» 2500. -. 9Q
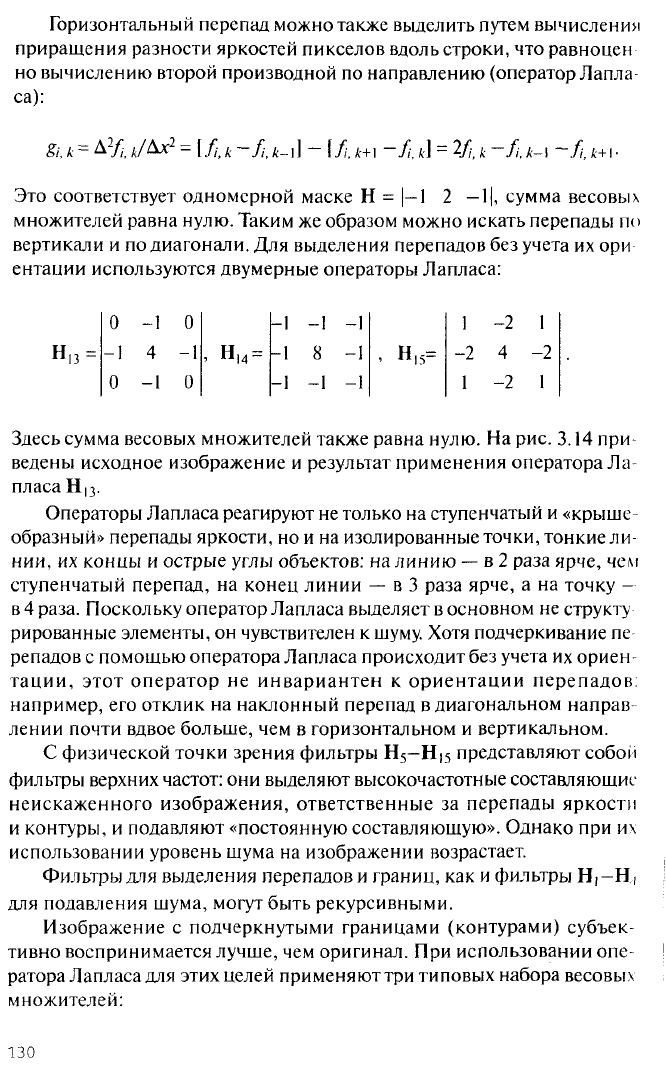
Горизонтальный перепад можно также выделить путем вычисления
приращения разности яркостей пикселов вдоль строки, что равноцен
но вычислению второй производной по направлению (операторЛапла-
са):
gi,k =
^
2
fi,k/
Ax2
=[fi,k~fi,k~\\~\fi.k+)-fi,k]
=
Vi,k-fi.k~\~fi,k+\-
Это соответствует одномерной маске Н =
|—1
2
—1|,
сумма весовых
множителей равна
нулю.
Таким же образом можно искать перепады по
вертикали и
по
диагонали. Для выделения перепадов без учета их ори
ентации используются двумерные операторы Лапласа:
0
-1
0
-1
4
-1
0
-1
0
>
Н
14 =
-1 -1 -1
-1 8 -1
-1 -1 -1
. н
|5
=
Здесь сумма весовых множителей также равна
нулю.
На
рис.
3.14 при-
ведены исходное изображение и результат применения оператора Ла
пласа Н|з-
Операторы Лапласа реагируют
не
только на ступенчатый
и
«крыше
образный» перепады яркости, но
и
на изолированные
точки,
тонкие
ли-
нии, их концы и острые углы объектов: на линию
—
в
2
раза ярче, чем
ступенчатый перепад, на конец линии
—
в 3 раза ярче, а на точку
—
в 4
раза. Поскольку оператор Лапласа выделяет
в
основном не структу
рированные элементы, он чувствителен к
шуму.
Хотя подчеркивание пе
репадов
с
помощью оператора Лапласа происходит
без
учета их ориен
тации, этот оператор не инвариантен к ориентации перепадов:
например, его отклик на наклонный перепад
в
диагональном направ
лении почти вдвое больше, чем в горизонтальном и вертикальном.
С физической точки зрения фильтры Н
5
—Н|
5
представляют собой
фильтры верхних
частот:
они выделяют высокочастотные составляющие
неискаженного изображения, ответственные за перепады яркости
и контуры, и подавляют «постоянную составляющую». Однако при их
использовании уровень шума на изображении возрастает.
Фильтры для выделения перепадов
и
границ, как и фильтры Н,— Н.|
для подавления шума, могут быть рекурсивными.
Изображение с подчеркнутыми границами (контурами) субъек-
тивно воспринимается
лучше,
чем оригинал. При использовании опе-
ратора Лапласа
для
этих целей применяют
три
типовых набора весовых
множителей:
130