Капралов Е.Г., Кошкарев А.В., Тикунов В.С. и др. Геоинформатика
Подождите немного. Документ загружается.

Обычно используют следующие три стандартные комбинации
зон.
1.
Красная, зеленая и синяя зоны создают композицию истин-
ного цвета. Истинный цвет означает, что объекты выглядят так,
как они должны были бы восприниматься невооруженным глазом
(рис.
20 цв. вкл.).
2. Ближняя ИК, красная и зеленая зоны создают композицию
ложного цвета. Композиции ложного цвета выглядят аналогично
фотоснимку в ИК области спектра, в которой, например, расти-
тельность представляется красной, вода — темно-синей или чер-
ной и т.д. (рис. 21 цв. вкл.).
3. Средняя ИК, ближняя ИК и зеленая зоны создают компо-
зицию псевдоцвета. В ней цвет объектов не соответствует естест-
венному: например, дороги могут быть красными, вода — жел-
той, растительность — синей, т.е. изображаться в произвольной
палитре. Такая композиция часто позволяет подчеркнуть цветом
различия объектов, что удобно для визуального дешифрирования
снимка.
Простое зональное отношение
В
ИК
/В
К
(В
к
и В
пк
— яркости в крас-
ной и ближней инфракрасной зонах) наиболее чувствительно к
присутствию растительности, учитывает различия в яркости меж-
ду растительными и нерастительными объектами, представляет
индикатор сомкнутости растительного покрова, но является фун-
кцией времени.
Вегетационный индекс. Для его вычисления строят разные эм-
пирические соотношения этих зон, но чаще используют нормали-
зованный вегетационный индекс
NDV\ = (B
KK
-B
K
)/(B
HK
+ B
K
). (3.4)
Он подчеркивает контраст обнаженных пород и почв с зеленой
растительностью, позволяет разделить разные типы растительно-
сти.
Так, для водных объектов он принимает отрицательные значе-
ния; для почв, грунтов, сухой растительности близок к нулю; мак-
симальные значения характерны для вегетирующей растительно-
сти и разные — для различных состояний растительного покрова.
Значения индекса возрастают с развитием зеленой биомассы и
уменьшаются с ее усыханием. В то же время одни и те же значения
вегетационного индекса могут соответствовать экологически раз-
личным категориям естественной и культурной растительности.
Метод главных компонент. Для определения статистически
независимых производных признаков классификации, связанных
с повышением спектрального контраста изображения, служит пре-
образование исходных спектральных признаков методом компо-
нентного анализа (см.
2.2.2).
В применении к снимкам процедуру легко пояснить графиче-
ски на примере двух спектральных зон, демонстрирующих соотно-
Значение Значение
яркости яркости
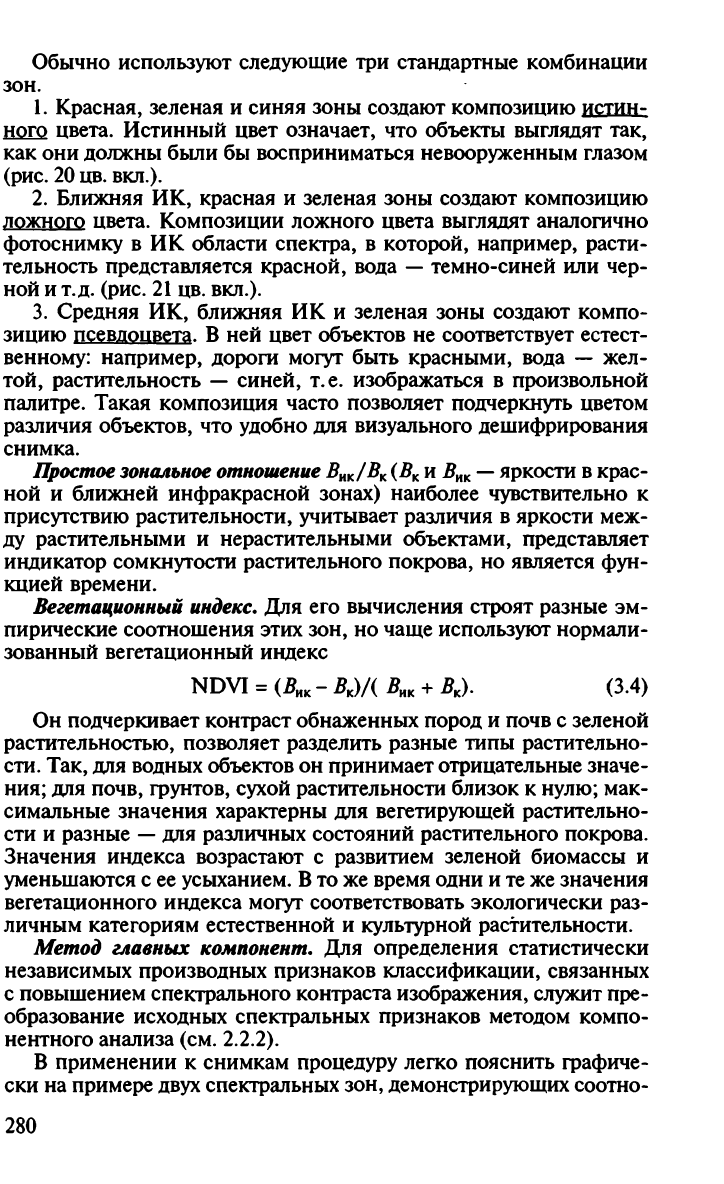
Рис.
39. Преобразование спектрального пространства методом главных
компонент:
а
— эллипс рассеяния для двух зон В1 и В2\ б
—
положение осей, соответству-
ющее двум главным компонентам ГК1 и ГК2
шение их значений яркости (рис. 39). Если распределение значений
яркости в каждой зоне нормальное или близкое к нормальному,
то при отображении на плоскости двух зон это распределение имеет
вид облака, называемого эллипсом рассеяния.
При выполнении преобразования методом главных компонент
оси спектрального пространства поворачивают так, чтобы новые
оси стали параллельны осям эллипса рассеяния. Поэтому первая
главная компонента (ГК1 —
principal
component,
PCI) соответ-
ствует наибольшей оси эллипса — направлению наибольшего раз-
броса значений яркости. Направление ГК1 задаётся собственным
вектором преобразования, а его длина — первым собственным
значением (собственные значения преобразования ранжируются
по убыванию). Вторая главная компонента ГК2 соответствует наи-
большему поперечному сечению эллипса, ортогональному к пер-
вой главной компоненте (в двухмерном случае — малой оси эл-
липса рассеяния). Она отражает значения вариаций данных, кото-
рые еще не охвачены первой главной компонентой.
Так как в спектральном пространстве координаты точек явля-
ются значениями яркости пикселов в цифровой записи снимка,
то в процессе преобразования определяются их новые значения,
которые хранятся в создаваемых файлах главных компонент.
Такой метод позволяет получить, например, по четырем ис-
ходным зонам снимка четыре новых изображения, ранжирован-
ных по убыванию дисперсии яркости (спектрального контраста).
При этом в первом изображении (первой главной компоненте)
такой контраст максимально подчеркнут, во втором отображают-
ся контуры, на которых происходит смена контраста, а изображе-
ния, соответствующие остальным компонентам, содержат, в ос-
новном, информацию о различных шумах и систематических по-
грешностях съемочной системы. Метод главных компонент позво-
ляет уменьшить число анализируемых снимков до трех и подчерк-
нуть яркостной контраст, что увеличивает различия между объек-
тами в системе новых признаков.
Часто изображения первых трех главных компонент применяют
для получения синтезированного изображения. Известно, что та-
кое изображение содержит больше информации, чем любая ком-
бинация трех исходных спектральных зон.
В основе автоматизированного дешифрирования снимков лежит
классификация объектов (см.
2.2.2).
При этом исходят из того, что
каждому пикселу многозонального снимка соответствует набор
значений спектральных признаков, или вектор в спектральном
пространстве, размерность которого равна числу съемочных зон.
Тогда процесс классификации сводится к распределению всех эле-
ментов растра по классам в соответствии с отражательной способ-
ностью (значением спектральной яркости) каждого объекта в од-
ной или нескольких зонах спектра, например, типов растительно-
сти или категорий использования земель.
Трудности классификации связаны, прежде всего, с изменчи-
востью. Часто классификация бывает неопределенной, поскольку
элементы растра могут принадлежать сразу нескольким классам —
это так называемые «смешанные элементы». Но в процессе клас-
сификации неопределенность игнорируется, и каждый элемент
помещается в один из классов. Правило классификации обычно
формируют на основе признаков типичных объектов, принадлеж-
ность которых к данному классу заранее установлена.
Алгоритмы подразделяют на два типа: алгоритмы контролируе-
мой и неконтролируемой классификации. При контролируемой
классификации правила перехода от показателей спектральной
яркости к классам объектов вырабатывают на «учебном» (тесто-
вом, эталонном) участке, а затем автоматически применяют и на
остальной части снимка. Эти алгоритмы также называют класси-
фикацией с обучением.
I.
Контролируемую классификацию реализуют с помощью алго-
ритмов, использующих разные методы учета спектральных харак-
теристик эталонных объектов:
• дискриминантных функций, которые в простейшем случае пред-
ставляют собой линии, разделяющие объекты на классы, если они
не пересекаются в пространстве признаков;
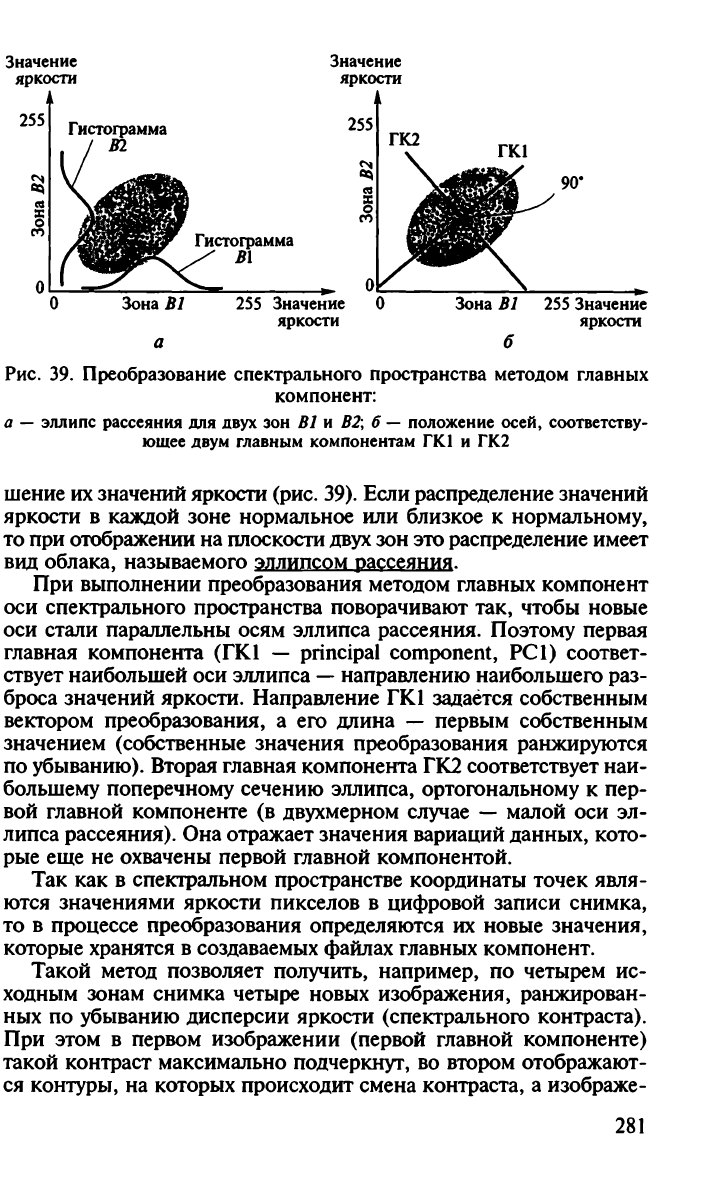
• минимальных расстояний, когда классифицируемые объекты
относят к тому или иному классу, вычисляя евклидово расстояние
в пространстве признаков между проверяемыми и эталонными
пикселами и относя каждый пиксел к тому классу, до эталона
которого это расстояние минимально (рис. 40);
Значение
яркости
Классифицируемый пиксел
Мл,
М
А2
Мдз
Значение
яркости
Зона А
Рис.
40. Метод минимального расстояния
• параллелепипеда, когда в признаковом пространстве выделя-
ют замкнутые прямоугольные области, границы которых задают на
основе выбора характерных диапазонов по гистограммам распре-
деления яркостей эталонных объектов в двух, трех или более зонах
спектра; каждый пиксел снимка относят к тому классу, в чей парал-
лелепипед он попадает по своим значениям яркости;
• максимального правдоподобия, основанного на статистических
оценках характеристик классов объектов. Этот алгоритм применяется
наиболее часто. При его реализации для каждого дешифрируемого
класса объектов нужно определить две функции условной вероят-
ности, связанные формулой Байеса:
P(X/Ai)
— правдоподобие
класса объектов A
f
при данном векторе признаков X и P(AJX) —
вероятность отнесения пикселов с их вектором признаков Хк классу
Ai [И. К. Лурье, А. Г. Косиков,
2003].
Первая функция отражает раз-
личия в яркостях объектов разных классов, и ее параметры нахо-
дят путем вычисления статистических характеристик распределе-
ния яркостей пикселов в пределах эталонных объектов на сним-
ке — построения обучающих выборок (рис. 41). Процедура класси-
фикации относит каждый пиксел с измеренным Хк тому объекту,
для которого правдоподобие максимально, т.е., согласно байесо-
ву решающему правилу, нахождение объекта в заданной области
признакового пространства статистически наиболее правдоподоб-
но (отсюда и название «метод максимального правдоподобия»).
Априори предполагается, что распределение спектральных яр-
костей пикселов объекта на многозональном снимке подчинено
нормальному закону. Тогда их распределение в пределах объекта
образует многомерные «эллипсы рассеяния» равной вероятности,
определяемые условием
P(X/A
t
)
-
const,
средними значениями яр-
кости и стандартного отклонения. В большинстве ГИС-пакетов,
используемых для выполнения классификации, процедуру обуче-
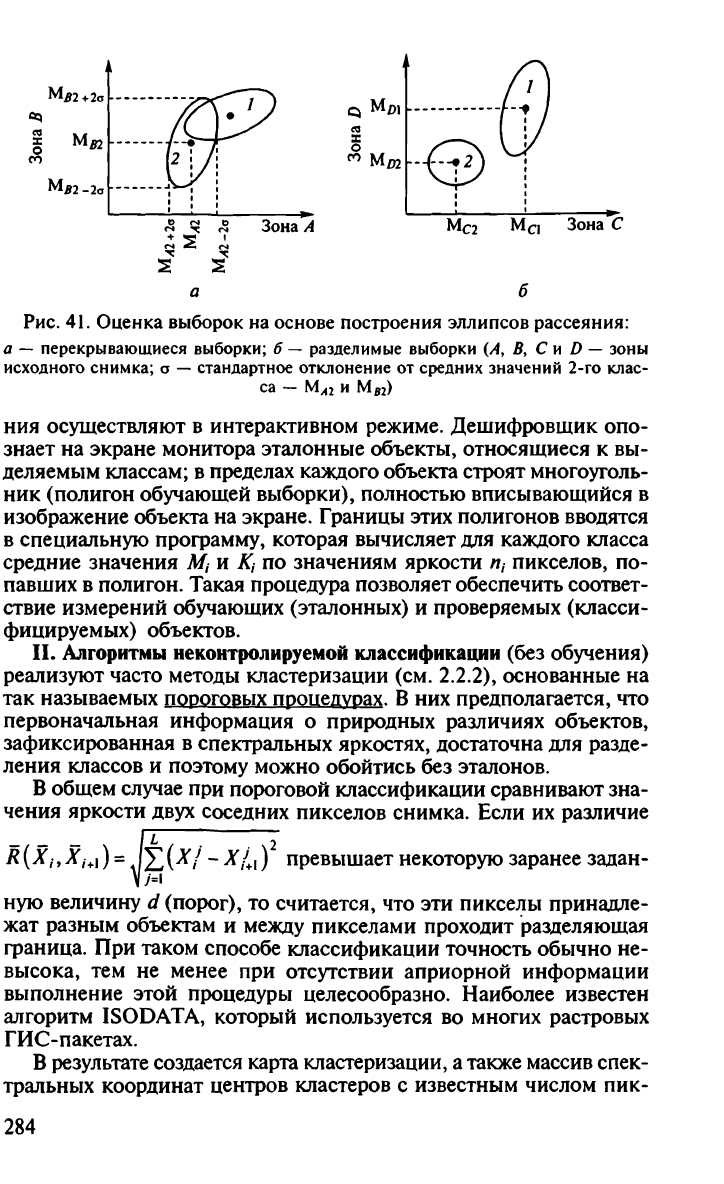
Рис. 41. Оценка выборок на основе построения эллипсов рассеяния:
а
— перекрывающиеся выборки; б
—
разделимые выборки (Л, В, С и D
—
зоны
исходного снимка; а — стандартное отклонение от средних значений 2-го клас-
са
—
М
А1
и
М
в2
)
ния осуществляют в интерактивном режиме. Дешифровщик опо-
знает на экране монитора эталонные объекты, относящиеся к вы-
деляемым классам; в пределах каждого объекта строят многоуголь-
ник (полигон обучающей выборки), полностью вписывающийся в
изображение объекта на экране. Границы этих полигонов вводятся
в специальную программу, которая вычисляет для каждого класса
средние значения M
f
и К, по значениям яркости л, пикселов, по-
павших в полигон. Такая процедура позволяет обеспечить соответ-
ствие измерений обучающих (эталонных) и проверяемых (класси-
фицируемых) объектов.
II.
Алгоритмы неконтролируемой классификации (без обучения)
реализуют часто методы кластеризации (см.
2.2.2),
основанные на
так называемых пороговых процедурах. В них предполагается, что
первоначальная информация о природных различиях объектов,
зафиксированная в спектральных яркостях, достаточна для разде-
ления классов и поэтому можно обойтись без эталонов.
В общем случае при пороговой классификации сравнивают зна-
чения яркости двух соседних пикселов снимка. Если их различие
R(X
iy
X
ul
)
= Г£(Ау - Лу
+
,)
2
превышает некоторую заранее задан-
ную величину d (порог), то считается, что эти пикселы принадле-
жат разным объектам и между пикселами проходит разделяющая
граница. При таком способе классификации точность обычно не-
высока, тем не менее при отсутствии априорной информации
выполнение этой процедуры целесообразно. Наиболее известен
алгоритм ISODATA, который используется во многих растровых
ГИС-пакетах.
В результате создается карта кластеризации, а также массив спек-
тральных координат центров кластеров с известным числом пик-
селов в каждом из них. Дешифровщик, используя карту кластери-
зации, а также дополнительную информацию, может оценить со-
ответствие кластеров классам объектов и принять решение об их
объединении в нужные тематические группы (выделы).
В состав программного обеспечения автоматизированной обра-
ботки аэрокосмических снимков обычно входит несколько алго-
ритмов классификаций. Применение того или иного алгоритма оп-
ределяется наличием априорной информации, качеством самого
снимка, решаемой задачей, опытом и интуицией дешифровщика.
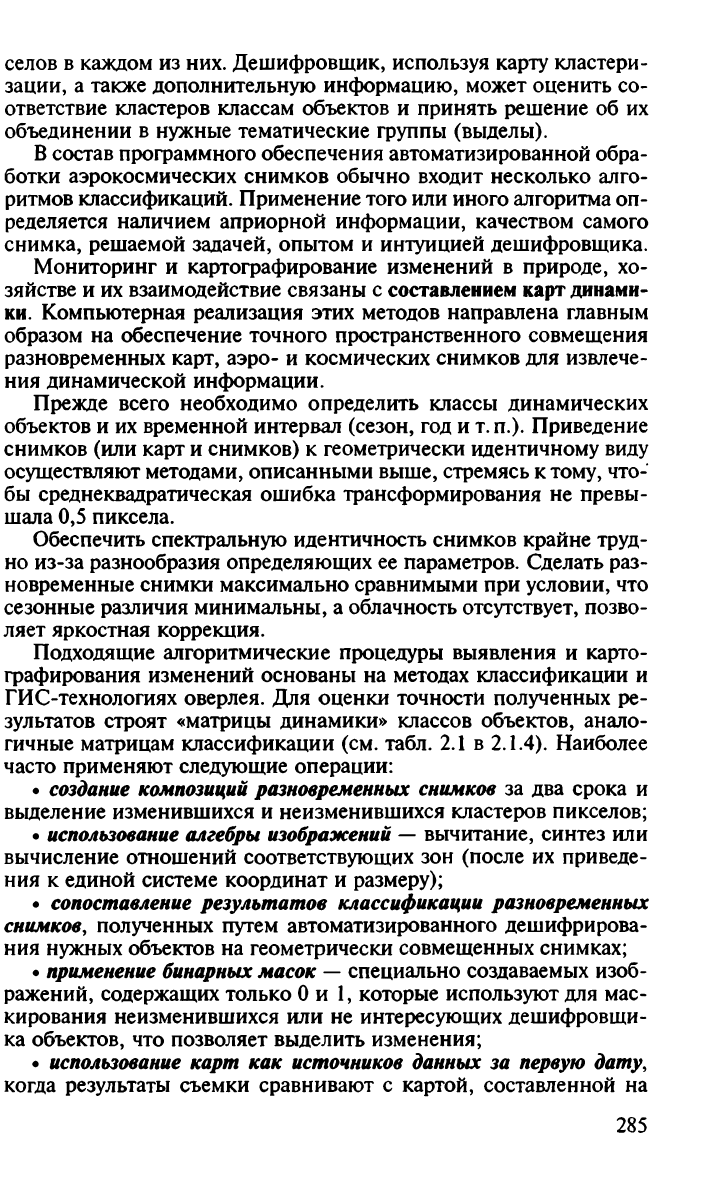
Мониторинг и картографирование изменений в природе, хо-
зяйстве и их взаимодействие связаны с составлением карт динами-
ки.
Компьютерная реализация этих методов направлена главным
образом на обеспечение точного пространственного совмещения
разновременных карт, аэро- и космических снимков для извлече-
ния динамической информации.
Прежде всего необходимо определить классы динамических
объектов и их временной интервал (сезон, год и т. п.). Приведение
снимков (или карт и снимков) к геометрически идентичному виду
осуществляют методами, описанными выше, стремясь к тому, что-
бы среднеквадратическая ошибка трансформирования не превы-
шала 0,5 пиксела.
Обеспечить спектральную идентичность снимков крайне труд-
но из-за разнообразия определяющих ее параметров. Сделать раз-
новременные снимки максимально сравнимыми при условии, что
сезонные различия минимальны, а облачность отсутствует, позво-
ляет яркостная коррекция.
Подходящие алгоритмические процедуры выявления и карто-
графирования изменений основаны на методах классификации и
ГИС-технологиях оверлея. Для оценки точности полученных ре-
зультатов строят «матрицы динамики» классов объектов, анало-
гичные матрицам классификации (см. табл. 2.1 в
2.1.4).
Наиболее
часто применяют следующие операции:
• создание композиций разновременных снимков за два срока и
выделение изменившихся и неизменившихся кластеров пикселов;
• использование алгебры изображений — вычитание, синтез или
вычисление отношений соответствующих зон (после их приведе-
ния к единой системе координат и размеру);
• сопоставление результатов классификации разновременных
снимков, полученных путем автоматизированного дешифрирова-
ния нужных объектов на геометрически совмещенных снимках;
• применение бинарных масок — специально создаваемых изоб-
ражений, содержащих только 0 и 1, которые используют для мас-
кирования неизменившихся или не интересующих дешифровщи-
ка объектов, что позволяет выделить изменения;
• использование карт как источников данных за первую дату,
когда результаты съемки сравнивают с картой, составленной на
более ранний срок; в этом случае карту сканируют, снимок транс-
формируют в проекцию карты, выполняют его классификацию, а
далее для карты и классифицированного снимка применяют опи-
санные выше операции;
• рунное цифрование классов изменений по экрану — выделение
контуров площадных объектов на разновременных картах класси-
фикации или на снимках высокого разрешения способом так на-
зываемого цифрования по растровой подложке с последующим
совмещением полученных векторных карт на одной основе.
На рис. 22 цв. вкл. приведена карта динамики береговой линии
Аральского моря, составленная с применением таких операций.
Развитие геоинформационных технологий ведет к попыткам
разработать мониторинговые системы, работающие с минималь-
ным участием человека. Они опираются на создание экспертных
систем и баз знаний (см. 4.1).
Контрольные вопросы
1. Каковы структура и типы растровых данных, используемых в
ГИС?
2. Какие основные процедуры используют при цифровой обработке
снимков?
3. Какие сочетания зон создают изображение в натуральных цветах,
псевдоцвете?
4. Что такое «яркостная коррекция»?
5. Каково назначение преобразования контраста?
6. Чем различаются координатная привязка и трансформирование
снимков?
7. На чем основано компьютерное дешифрирование снимков?
8. Каковы основные различия контролируемой (с обучением) и не-
контролируемой (без обучения) классификации?
9. Дайте характеристику различных методов классификации.
10. Каковы основные особенности методов, применяемых при изуче-
нии изменений объектов?
3.2. ГИС и глобальные системы позиционирования
Как неоднократно отмечалось в предыдущих главах, ГИС опе-
рируют координированными пространственно-временными дан-
ными. Наиболее современные определения координат основаны
на использовании глобальных систем позиционирования (ГСП). Суть
их работы заключается в следующем: летящие по строго заданным
орбитам спутники, мгновенные координаты которых точно изве-
стны, непрерывно излучают радиосигналы, регистрируемые спе-
циальными спутниковыми приемниками на Земле. Это позволяет
с помощью радиотехнических средств измерять расстояния (даль-
ности) от приемника до спутников и определять местоположение
приемника (его координаты), или находить вектор между двумя
приемниками (разности координат их положения).
К основным задачам, решаемым спутниковыми системами,
относят:
• развитие геодезических сетей, служащих основой для опреде-
ления координат любых объектов;
• производство нивелирных работ, выполняемых вплоть до
III
и
даже II классов точности;
• распространение единой высокоточной шкалы времени;
• исследование геодинамических процессов;
• мониторинг состояния окружающей среды;
• координатное обеспечение кадастровых, землеустроительных,
сельскохозяйственных и других работ;
• координатное обеспечение полевых тематических съемок и
инженерно-географических работ с помощью спутниковых при-
емников, соединенных со специализированным датчиком (эхоло-
том, анероидом, магнитометром, цифровой видеокамерой, аэро-
фотокамерой и др.);
• создание и обновление баз данных ГИС на основе комплекси-
рования спутниковых приемников со специализированными по-
левыми компьютерами, цифровыми видеокамерами, электронными
тахеометрами и инерциальными навигационными системами.
Интеграция ГСП и ГИС является особо важной. Рядом фирм
выпускаются спутниковые приемники и программное обеспече-
ние,
специально ориентированное на сбор данных для ГИС. На-
блюдатель, перемещаясь по местности с таким приемником, вво-
дит в накопитель пространственные и атрибутивные данные. Они
сохраняются в соответствующих форматах и могут быть выведены
на экран в целях визуализации и контроля. Большинство GPS-при-
емников, предназначенных для ГИС, позволяет использовать циф-
ровые данные из сети Интернет. Все большее внимание привлека-
ет возможность комплексирования ГИС, ГСП и материалов дис-
танционного зондирования (ДЗ). Технологии ГСП и ДЗ весьма удач-
но дополняют друг друга.
Преимущества применения спутниковых методов позициони-
рования для ГИС в следующем:
• оперативность, всепогодность, оптимальная точность и эф-
фективность; в отличие от традиционных геодезических методов
не нужна видимость между определяемыми пунктами;
• глобальность — возможность получения данных в единой или
во взаимосвязанных системах координат в любой точке Земли;
• четкая временная привязка данных;
• минимизация влияния человеческого фактора;
• цифровая форма записи;
• применение стандартных форматов записи;
• возможность классификации данных на стадии их полевого сбора;
• возможность сбора данных в различных картографических про-
екциях;
• сбор больших объемов данных.
Применение спутниковых методов позиционирования рассмат-
ривается как один из самых значительных прорывов в ГИС инду-
стрии, позволяющих проводить привязку, сбор и обработку дан-
ных с невиданной ранее скоростью и качеством.
ГСП и их подсистемы. К концу XX в. в мире созданы две эксплуа-
тационные спутниковые глобальные системы позиционирования,
ознаменовавшие революционные изменения в геодезических из-
мерениях. Это американская система
Global
Positioning
System
(GPS)
и российская Глобальная навигационная спутниковая система
(ГЛОНАСС). Их инженерно-техническая реализация потребовала
немалых затрат и десятков лет напряженной работы.
В каждой системе выделяют по три главные подсистемы (сег-
менты): наземного контроля и управления (НКУ), созвездия кос-
мических аппаратов (КА) и аппаратуры пользователей (АП).
Подсистема НКУ состоит из станций слежения за КА, службы
точного времени, главной станции с вычислительным центром и
станций загрузки данных на борт спутников. Спутники проходят
над контрольными пунктами дважды в сутки. Собранную на стан-
циях слежения информацию об орбитах используют для прогнози-
рования координат спутников. После этого соответствующие дан-
ные загружают на борт каждого спутника.
Главная наземная станция GPS находится на базе ВВС Колора-
до-Спрингс, другие ее наземные станции расположены на остро-
вах Вознесения, Диего-Гарсия, атолле Кваджалейн и на Гавай-
ских островах.
НКУ ГЛОНАСС включает Центр управления системой (ЦУС),
находящийся под Москвой, центральный синхронизатор (ЦС) с
высокоточным стандартом частоты и времени для синхронизации
системы и сеть станций слежения на территории России.
В каждой спутниковой системе подсистемы КА содержат по 24
основных работающих и по несколько резервных спутников. Спут-
ники равномерно распределены в околоземном пространстве на
высотах около 20 тыс. км. На каждом спутнике установлены сол-
нечные батареи питания, двигатели корректировки орбит, атомные
эталоны частоты—времени, аппаратура для приема и передачи
радиосигналов. Благодаря атомным эталонам частоты—времени
генерируемые на спутниках электромагнитные колебания облада-
ют весьма высокой стабильностью. Это чрезвычайно важно, так
как все способы измерения дальностей основаны на определениях
времени прохождения электромагнитной волны от спутника до
приемника.
Для измерения дальностей передатчики на всех спутниках из-
лучают радиоволны на двух частотах, обозначаемых L1 и L2. Две
частоты нужны для того, чтобы исключить из измерений суще-
ственные временные задержки, возникающие при прохождении
радиоволн через ионосферу. В GPS все спутники работают на оди-
наковых частотах, при этом частоте L1 соответствует длина волны
19,0 см, а частоте L2
—
длина волны 24,4 см. В ГЛОНАСС значения
несущих частот L1 и L2 у каждого спутника свои, а соответству-
ющие им длины волн близки к 19 и 24 см.
Основу подсистемы аппаратуры пользователей (АП) составля-
ет спутниковый приемник. Аппаратура спутника и спутниковый
приемник образуют радиодальномер. Приемник принимает радио-
волны, передаваемые спутником, и сравнивает их с электрическими
колебаниями, выработанными в самом приемнике. В результате
получают время распространения радиоволны, а затем и дальность
от приемника до космического аппарата. Дальности определяют
двумя методами: кодовым (стандартная точность) и фазовым (наи-
более точные измерения). Кроме этого в приемник передается так
называемое навигационное сообщение, несущее необходимую для
определения координат информацию.
Спутниковые приемники достигли высокого совершенства. Со-
зданы приемники, ориентированные как на использование толь-
ко спутников одной системы, главным образом GPS, так и на одно-
временное использование спутников GPS и ГЛОНАСС. Точность
определения координат зависит от числа видимых КА. Использо-
вание спутниковых группировок двух систем позволяет увеличить
количество видимых спутников и повысить точность определений
координат примерно в 1,5 раза. В городских условиях, особенно при
наличии множества высотных зданий, одна система не в состоянии
обеспечить непрерывные измерения в течение длительного време-
ни.
Применение комплекса ГЛОНАСС/GPS практически позволя-
ет удвоить продолжительность производительного времени по срав-
нению со временем использования только спутников GPS.
Все современные спутниковые приемники являются многока-
нальными с числом каналов от 6 и более. Каждый канал следит за
своим спутником. При измерениях проблемой является срыв сиг-
налов на трассах распространения радиоволн из-за таких препят-
ствий, как рельеф, покрытые листвой деревья, здания и другие
сооружения. Чем больше каналов, тем легче преодолеть эти труд-
ности и найти необходимое количество видимых спутников.
По конструктивным особенностям различают:
• приемники односистемные, ориентированные на прием сиг-
налов одной системы — либо GPS, либо ГЛОНАСС;
• приемники двухсистемные, принимающие сигналы спутни-
ков ГЛОНАСС и GPS;
• приемники одночастотные, работающие только на частоте L1;
• приемники двухчастотные, выполняющие измерения на час-
тотах L1 и L2;
10 Геоинформатика
289