Jost J. Partial Differential Equations
Подождите немного. Документ загружается.

2.3 Maximum Principles for Nonlinear Differential Equations 47
Here, one should think of (2.3.6) as an analogue of the sign condition
c(x) ≤ 0 and the bound for the b
i
(x) as well as a bound of the right-hand
side f of the equation Lu = f .
Proof: We shall follow a similar strategy as in the proof of Theorem 2.3.1 and
shall reduce the result to the maximum principle from Section 2.1 for linear
equations. Here v is an auxiliary function to be determined, and w := u −v.
We consider the operator
Lw :=
d
i,j=1
a
ij
(x)w
x
i
x
j
+
d
i=1
b
i
(x)w
x
i
with
a
ij
(x):=
1
0
∂F
∂r
ij
x, u(x),Du(x),tD
2
u(x)
dt, (2.3.8)
while the coefficients b
i
(x) are defined through the following equation:
d
i=1
b
i
(x)w
x
i
=
d
i,j=1
1
0
∂F
∂r
ij
x, u(x),Du(x),tD
2
u(x)
−
∂F
∂r
ij
x, u(x),Dv(x),tD
2
u(x)
dt · v
x
i
x
j
+ F (x, u(x),Du(x), 0) − F (x, u(x),Dv(x), 0) . (2.3.9)
(That this is indeed possible follows from the mean value theorem and the
assumption F ∈ C
2
. It actually suffices to assume that F is twice continu-
ously differentiable with respect to the variables r only.) Then L satisfies the
assumptions of Theorem 2.1.1. Now
Lw = L(u − v)
=
d
i,j=1
1
0
∂F
∂r
ij
x, u(x),Du(x),tD
2
u(x)
dt
u
x
i
x
j
+ F (x, u(x),Du(x), 0)
−
d
i,j=1
1
0
∂F
∂r
ij
x, u(x),Dv(x),tD
2
u(x)
dt
v
x
i
x
j
− F (x, u(x),Dv(x), 0)
= F
x, u(x),Du(x),D
2
u(x)
−
⎛
⎝
d
i,j=1
α
ij
(x)v
x
i
x
j
+ F (x, u(x),Dv(x), 0)
⎞
⎠
,
(2.3.10)
with
α
ij
(x)=
1
0
∂F
∂r
ij
x, u(x),Dv(x),tD
2
u(x)
dt (2.3.11)

48 2. The Maximum Principle
(this again comes from the integral of a total derivative with respect to t).
Here by assumption
λ |ξ|
2
≤
d
i,j=1
α
ij
(x)ξ
i
ξ
j
for all x ∈ Ω, ξ ∈ R
d
. (2.3.12)
We now look for an appropriate auxiliary function v with
Mv :=
α
ij
(x)v
x
i
x
j
+ F (x, u(x),Dv(x), 0) ≤ 0. (2.3.13)
We now suppose that for δ := diam(Ω), Ω iscontainedinthestrip{0 <
x
1
<δ}.Wenowtry
v(x)=max
∂Ω
u
+
+
μ
2
λ
e
(μ
1
+1)δ
− e
(μ
1
+1)x
1
(2.3.14)
(u
+
(x)=max(0,u(x))).
Then
Mv = −
μ
2
λ
(μ
1
+1)
2
α
11
(x)e
(μ
1
+1)x
1
+ F (x, u(x),Dv(x), 0)
≤−μ
2
(μ
1
+1)
2
e
(μ
1
+1)x
1
+ μ
2
μ
1
(μ
1
+1)e
(μ
1
+1)x
1
+ μ
2
≤0
by (2.3.6), (2.3.12). This establishes (2.3.13). Equation (2.3.10) then implies,
even under the assumption F [u] ≥ 0inplaceofF [u]=0,
Lw ≥ 0.
By definition of v,wealsohave
w = u − v ≤ 0on∂Ω.
Theorem 2.1.1 thus implies
u ≤ v in Ω,
and (2.3.7) follows with c = e
(μ
1
+1) diam(Ω)
− 1. More precisely, under the
assumption F [u] ≥ 0, we have proved the inequality
sup
Ω
u ≤ max
∂Ω
u
+
+ c
μ
2
λ
, (2.3.15)
but the inequality in the other direction of course follows analogously, i.e.,
inf
Ω
u ≥ min
∂Ω
u
−
− c
μ
2
λ
(2.3.16)
(u
−
(x):=min(0,u(x))).

2.3 Maximum Principles for Nonlinear Differential Equations 49
Theorem 2.3.2 is of interest even in the linear case. Let us look once more
at the simple equation
f
(x)+κf(x)=0 forx ∈ (0,π),
f(0) = f(π)=0,
with constant κ. We may apply Theorem 2.3.2 with λ =1,μ
1
=0,
μ
2
=
κ sup
(0,π)
|f| for κ>0,
0forκ ≤ 0.
It follows that
sup
(0,π)
|f|≤cκ sup
(0,π)
|f|;
i.e., if
κ<
1
c
,
we must have f ≡ 0. More generally, in place of κ, one may take any function
c(x)withc(x) ≤ κ on (0,π) and consider f
(x)+c(x)f(x) = 0, without
affecting the preceding conclusion. In particular, this allows us to weaken
the sign condition c(x) ≤ 0. The sharpest possible result here is that f ≡ 0
if κ is smaller than the smallest eigenvalue λ
1
of
d
2
dx
2
on (0,π), i.e., 1. This
analogously generalizes to other linear elliptic equations, e.g.,
Δf(x)+κf(x)=0 inΩ,
f(y)=0 on∂Ω.
Theorem 2.3.2 does imply such a result, but not with the optimal bound λ
1
.
A reference for the present chapter is Gilbarg–Trudinger [9].
Summary and Perspectives
The maximum principle yields examples of so-called a priori estimates, i.e.,
estimates that hold for any solution of a given differential equation or class
of equations, depending on the given data (boundary values, right-hand side,
etc.), without the need to know the solution in advance or without even
having to guarantee in advance that a solution exists. Conversely, such a
priori estimates often constitute an important tool in many existence proofs.
Maximum principles are characteristic for solutions of elliptic (and parabolic)
PDEs, and they are not restricted to linear equations. Often, they are even
the most important tool for studying certain nonlinear elliptic PDEs.

50 2. The Maximum Principle
Exercises
2.1 Let Ω
1
,Ω
2
⊂ R
d
be disjoint open sets such that
¯
Ω
1
∩
¯
Ω
2
contains a
smooth hypersurface T , e.g.,
Ω
1
:= {(x
1
,...,x
d
):|x| < 1,x
1
> 0},
Ω
2
:= {(x
1
,...,x
d
):|x| < 1,x
1
< 0},
T = {(x
1
,...,x
d
):|x| < 1,x
1
=0}.
Let u ∈ C
0
(
¯
Ω
1
∪
¯
Ω
2
) ∩C
2
(Ω
1
) ∩C
2
(Ω
2
)beharmoniconΩ
1
and on Ω
2
,
i.e.,
Δu(x)=0,x∈ Ω
1
∪ Ω
2
.
Does this imply that u is harmonic on Ω
1
∪ Ω
2
∪ T ?
2.2 Let Ω be open in R
2
= {(x, y)}. For a nonconstant solution u ∈ C
2
(Ω)
of the differential equation
u
xy
=0 inΩ,
is it possible to assume an interior maximum in Ω?
2.3 Let Ω be open and bounded in R
d
.On
Ω ×[0, ∞) ⊂ R
d+1
= {(x
1
,...,x
d
,t)},
we consider the heat equation
u
t
= Δu, where Δ =
d
i=1
∂
2
(∂x
i
)
2
.
Show that for bounded solutions u ∈ C
2
(Ω ×(0, ∞)) ∩ C
0
(
¯
Ω ×[0, ∞)),
sup
Ω×[0,∞)
u ≤ sup
(
¯
Ω×{0})∪(∂Ω×[0,∞))
u.
2.4 Let u : Ω → R be harmonic, Ω
⊂⊂ Ω ⊂ R
d
. We then have, for all i, j
between 1 and d,
sup
Ω
|u
x
i
x
j
|≤
2d
dist(Ω
,∂Ω)
2
sup
Ω
|u|.
Prove this inequality. Write down and demonstrate an analogous inequal-
ity for derivatives of arbitrary order!
2.5 Let Ω ⊂ R
d
be open and bounded. Let u ∈ C
2
(Ω) ∩ C
0
(
¯
Ω) satisfy
Δu = u
3
,x∈ Ω,
u ≡ 0,x∈ ∂Ω.
Show that u ≡ 0inΩ.
Exercises 51
2.6 Prove a version of the maximum principle of Alexandrov and Bakelman
for operators
Lu =
n
i,j=1
a
ij
(x)u
x
i
x
j
(x),
assuming in place of ellipticity only that det(a
ij
(x)) is positive in Ω.
2.7 Control the maximum and minimum of the solution u of an elliptic
Monge–Amp`ere equation
det(u
x
i
x
j
(x)) = f(x)
in a bounded domain Ω.
2.8 Let u ∈ C
2
(Ω) be a solution of the Monge–Amp`ere equation
det(u
x
i
x
j
(x)) = f(x)
in the domain Ω with positive f. Suppose there exists x
0
∈ Ω where the
Hessian of u is positive definite. Show that the equation then is elliptic
at u in all of Ω.
2.9 Let R
2
:= {(x
1
,x
2
)},Ω :=
˚
B(0,R
2
) \ B(0,R
1
)withR
2
>R
1
> 0. The
function φ(x
1
,x
2
):=a + b log(|x|)isharmonicinΩ for all a, b.Let
u ∈ C
2
(Ω) ∩ C
0
(
¯
Ω) be subharmonic, i.e.,
Δu ≥ 0,x∈ Ω.
Show that
M(r) ≤
M(R
1
) log(
R
2
r
)+M(R
2
) log(
r
R
1
)
log(
R
2
R
1
)
with
M(r):= max
∂B(0,r)
u(x)
and R
1
≤ r ≤ R
2
.
2.10 Let
u
1
:=
1
2
+
1
2
(x
2
+ y
2
),
u
2
:=
3
2
−
1
2
(x
2
+ y
2
).
Show that u
1
and u
2
solve the Monge–Amp`ere equation
u
xx
u
yy
− u
2
xy
=1
and
u
1
= u
2
=1 on∂B(0, 1).
Is this compatible with the uniqueness result for the Dirichlet problem
for nonlinear elliptic PDEs?
52 2. The Maximum Principle
2.11 Let Ω
T
:= Ω × (0,T), and suppose u ∈ C
2
(Ω
T
) ∩ C
0
(
¯
Ω
T
) satisfies
u
t
= Δu + u
2
in Ω
T
,
u(x, t) >c>0 for (x, t) ∈ (Ω ×{0}) ∪ (∂Ω × [0,T)).
Show that
(a) u>cfor all (x, t) ∈
¯
Ω
T
.
(b) If in addition u(x, t)=u(x, 0) for all x ∈ ∂Ω and all t,thenT<∞.
3. Existence Techniques I: Methods Based on
the Maximum Principle
3.1 Difference Methods: Discretization of
Differential Equations
The basic idea of the difference methods consists in replacing the given dif-
ferential equation by a difference equation with step size h and trying to
show that for h → 0, the solutions of the difference equations converge to a
solution of the differential equation. This is a constructive method that in
particular is often applied for the numerical (approximative) computation of
solutions of differential equations. In order to show the essential aspects of
this method in a setting that is as simple as possible, we consider only the
Laplace equation
Δu = 0 (3.1.1)
in a bounded domain in Ω in R
d
.WecoverR
d
with an orthogonal grid of
mesh size h>0; i.e., we consider the points or vertices
x
1
,...,x
d
=(n
1
h,...,n
d
h) (3.1.2)
with n
1
,...,n
d
∈ Z. The set of these vertices is called R
d
h
, and we put
¯
Ω
h
:= Ω ∩ R
d
h
. (3.1.3)
We say that x =(n
1
h,...,n
d
h)andy =(m
1
h,...,m
d
h) (all n
i
,m
j
∈ Z)are
neighbors if
d
i=1
|n
i
− m
i
| =1, (3.1.4)
or equivalently,
|x − y| = h. (3.1.5)
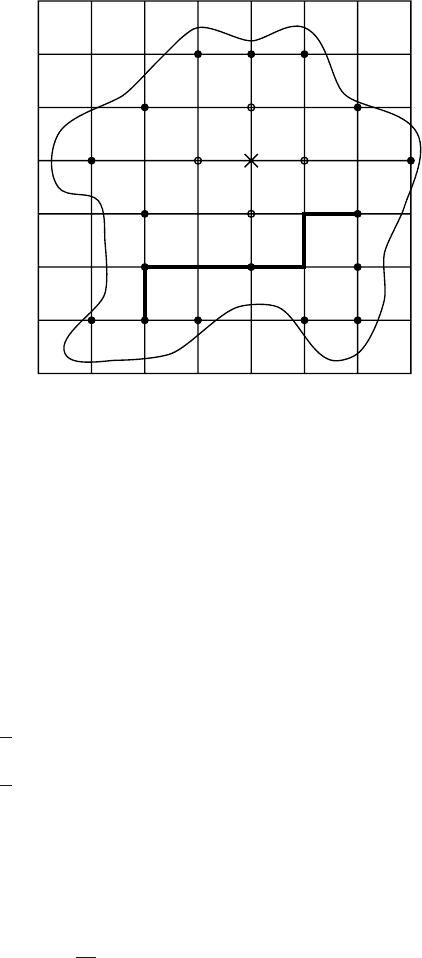
The straight lines between neighboring vertices are called edges. A connected
union of edges for which every vertex is contained in at most two edges is
called an edge path (see Figure 3.1).
54 3. Existence Techniques I: Methods Based on the Maximum Principle
Ω
Figure 3.1. x (cross) and its neighbors (open dots) and an edge path in
¯
Ω
h
(heavy
line) and vertices from Γ
h
(solid dots).
The boundary vertices of
¯
Ω
h
are those vertices of
¯
Ω
h
for which not all
their neighbors are contained in
¯
Ω
h
.LetΓ
h
be the set of boundary vertices.
Vertices in
¯
Ω
h
that are not boundary vertices are called interior vertices. The
set of interior vertices is called Ω
h
.
We suppose that Ω
h
is discretely connected, meaning that any two vertices
in Ω
h
can be connected by an edge path in Ω
h
. We consider a function
u :
¯
Ω
h
→ R
and put, for i =1,...,d, x =(x
1
,...,x
d
) ∈ Ω
h
,
u
i
(x):=
1
h
u(x
1
,...,x
i−1
,x
i
+ h, x
i+1
,...,x
d
) − u(x
1
,...,x
d
)
,
u
¯ı
(x):=
1
h
u(x
1
,...,x
d
) − u(x
1
,...,x
i−1
,x
i
− h, x
i+1
,...,x
d
)
. (3.1.6)
Thus, u
i
and u
¯ı
are the forward and backward difference quotients in the ith
coordinate direction. Analogously, we define higher-order difference quotients,
e.g.,
u
i¯ı
(x)=u
¯ıi
(x)= (u
¯ı
)
i
(x)
=
1
h
2
u(x
1
,...,x
i
+ h,...,x
d
) − 2u(x
1
,...,x
d
)
+ u(x
1
,...,x
i
− h,...,x
d
)
. (3.1.7)
If we wish to emphasize the dependence on the mesh size h,wewrite
u
h
,u
h
i
,u
h
¯ıi
in place of u, u
i
,u
i¯ı
, etc.

3.1 Difference Methods: Discretization of Differential Equations 55
The main reason for considering difference quotients, of course, is that for
functions that are differentiable up to the appropriate order, for h → 0, the
difference quotients converge to the corresponding derivatives. For example,
for u ∈ C
2
(Ω),
lim
h→0
u
h
i¯ı
(x
h
)=
∂
2
(∂x
i
)
2
u(x), (3.1.8)
if x
h
∈ Ω
h
tends to x ∈ Ω for h → 0. Consequently, we approximate the
Laplace equation
Δu =0 inΩ
by the difference equation
Δ
h
u
h
:=
d
i=1
u
h
i¯ı
=0 inΩ
h
, (3.1.9)
and we call this equation the discrete Laplace equation. Our aim now is to
solve the Dirichlet problem for the discrete Laplace equation
Δ
h
u
h
=0 inΩ
h
,
u
h
= g
h
on Γ
h
, (3.1.10)
and to show that under appropriate assumptions, the solutions u
h
converge
for h → 0 to a solution of the Dirichlet problem
Δu =0 inΩ,
u = g on ∂Ω, (3.1.11)
where g
h
is a discrete approximation of g. Considering the values of u
h
at the
vertices of Ω
h
as unknowns, (3.1.10) leads to a linear system with the same
number of equations as unknowns. Those equations that come from vertices
all of whose neighbors are interior vertices themselves are homogeneous, while
the others are inhomogeneous.
It is a remarkable and useful fact that many properties of the Laplace
equation continue to hold for the discrete Laplace equation. We start with
the discrete maximum principle:
Theorem 3.1.1: Suppose
Δ
h
u
h
≥ 0 in Ω
h
,
where Ω
h
, as always, is supposed to be discretely connected. Then
max
¯
Ω
h
u
h
=max
Γ
h
u
h
. (3.1.12)
If the maximum is assumed at an interior point, then u
h
has to be constant.

56 3. Existence Techniques I: Methods Based on the Maximum Principle
Proof: Let x
0
be an interior vertex, and let x
1
,...,x
2d
be its neighbors. Then
Δ
h
u
h
(x)=
1
h
2
2d
α=1
u
h
(x
α
) − 2du
h
(x
0
)
. (3.1.13)
If Δ
h
u
h
(x) ≥ 0, then
u
h
(x
0
) ≤
1
2d
2d
α=1
u
h
(x
α
), (3.1.14)
i.e., u
h
(x
0
) is not bigger than the arithmetic mean of the values of u
h
at the
neighbors of x
0
. This implies
u
h
(x
0
) ≤ max
α=1,...,2d
u
h
(x
α
), (3.1.15)
with equality only if
u
h
(x
0
)=u
h
(x
α
) for all α ∈{1,...,2d}. (3.1.16)
Thus, if u assumes an interior maximum at a vertex x
0
,itdoessoatall
neighbors of x
0
as well, and repeating this reasoning, then also at all neighbors
of neighbors, etc. Since Ω
h
is discretely connected by assumption, u
h
has to
be constant in
¯
Ω
h
. This is the strong maximum principle, which in turn
implies the weak maximum principle (3.1.12).
Corollary 3.1.1: The discrete Dirichlet problem
Δ
h
u
h
=0 in Ω
h
,
u
h
= g
h
on Γ
h
,
for given g
h
has at most one solution.
Proof: This follows in the usual manner by applying the maximum principle
to the difference of two solutions.
It is remarkable that in the discrete case this uniqueness result already
implies an existence result:
Corollary 3.1.2: The discrete Dirichlet problem
Δ
h
u
h
=0 in Ω
h
,
u
h
= g
h
on Γ
h
,
admits a unique solution for each g
h
: Γ
h
→ R.