Jackson Mark. Machining with Abrasives
Подождите немного. Документ загружается.

the controlled process is working within a constrained condition, or the ultimate
objective function has a certain optimum value. The first classification is
Adaptive Control Constraint (ACC) and the second one is Adaptive Control Opti-
mization (ACO).
A typical Adaptive Control Con straint (ACC) scheme was developed by Hahn
[12, 13] for grinding force control. In this work, a controlled-force grinding
technique is presented to eliminate random size and taper fluctuations resulting
from variable elastic deflections. Through this method, the affection coming from
variations of stock, hardness and wheel sharpness could be eliminated from the
sizing problem and allows the comprehensive grinding performance directly related
to grinding force which could simplify practical grinding setups. More over, the
control method is based on an analysis made of the rounding up dynamics of the
controlled-force system and a critical work speed is found which must be exceeded
in order to have a rounding-up action.
Adaptive Control with Optimization (ACO) system has been developed by
multiple researchers, such as Ko
¨
nig and Werner [21], Kelly et al. [22], Xiao and
Malkin [23–25], Li et al. [27], Dong et al. [28, 29], Srivastava et al. [30].
In Li’s [27] work, based on the basic grinding models, the objective function and
constraint functions for the multi-parameter optimum grindin g process have been
built and the non-linear optimum grinding control parameters have been obtained
through computer simulation and the actual grinding process is controlled by these
optimized parameters. According to the multi-parameter optimal theories, the
objective function obtaining the shortest gri nding time f can be formulated with
constraints as:
Minimize :
f ¼ t
1
þ t
2
þ t
3
Subject to the constraints :
g
1
¼ P P
b
b0 (no - burn constraint)
g
2
¼ z qb0 (burning constraint)
g
3
¼ R
a
R
max
b0 (roughness constraintÞ
g
4
¼ RN RN
max
b0 (roundness constraintÞ
g
5
¼ rt
1
þ t
2
þ t
3
ðÞDr ¼ 0 (size constraint Þ
g
6
¼ u
l
u
i
b0; i ¼ 1; 2 lower infeed constraintðÞ
g
7
¼ u
i
u
u
b0; i ¼ 1; 2 upper infeed constraintðÞ
(6.22)
where P is the power of the roughing stage and P
b
the burning power limit of the
workpiece; z is depth of the burning layer and q the depth of removal in the
subsequent finishing stage. R
a
is the actual surface roughness and R
max
its maxi-
mum allowable value; RN is the actual out-of-roundness and RN
max
its
maximum allowable threshold. rt
1
þ t
2
þ t
3
ðÞis the total actual infeed for the
whole grinding process and Dr the depth of removal denoting the radial workpiece
allowance. u
l
is the lower limit of the infeed rate and u
u
the upper limit, whilst i ¼ 1
denotes the roughing stage and i ¼ 2 denotes the finishing stage.
6 Traditional and Non-traditional Control Techniques for Grinding Processes 285
The strategies of multi-parameter optimization include three main cases.
The first one is for the conventional grinding process under the no-burn state, the
grinding power being much lower than the burning limit in the roughing stage with
the constrained models including g
1
g
7
; the second one, under the critical
burning state, requires that the inequality should be g
2
¼ 0. The last one is under
the burning state in the roughing stage, its constraint models including g
2
g
7
.
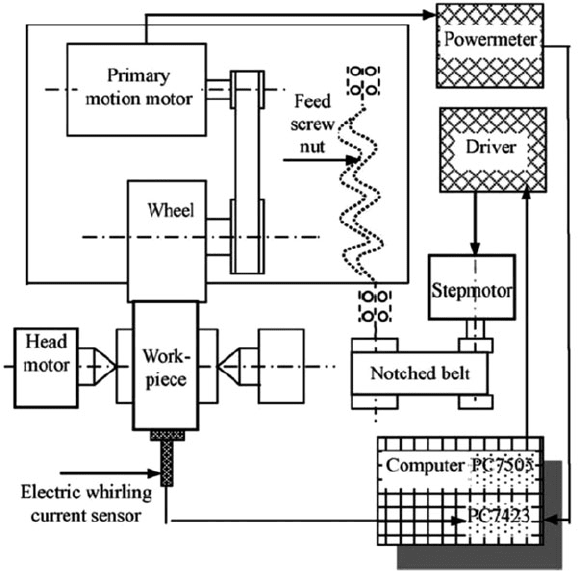
These optimum strategies were implemented experimentally on an external semi-
automatic grinder and the controlling system is illustrated in Fig. 6.14.
In Dong ’s [28, 29] work, an innovative technology, which allows for continuous
variation of the infeed rate to further reduce the cycle time, is developed for optimal
infeed control of cylindrical plunge grinding cycles. The controller is designed to
identify the state of the cycle at each sampling instant from on-line measurements
of power and size, and to then compute the infeed rate according to the optimal
policy whereby the infeed rate is determined according to the active constraint at
each segment of the cycle.
The objective of the grinding optimization is to find the optim al infeed rate uðtÞ
which minimize the cycle time while also satisfying constrains associated with the
machine capability and workpiece quality as well as the parameters assoc iated with
Fig. 6.14 Chart of the grinding controlling system
286 J. Liu et al.
periodically dressing of the wheel. Namely, the magnitude of the grinding infeed
rate which is related to productivity is constrained not only by machine limitations
but also part finish quality requirements including thermal damage, surface rough-
ness and dimensional tolerance. Consequently, the optimization problem can be
formulated as:
Minimize cycle time :
t
c
¼
P
N
i¼1
dt
i
Subject to the constraints :
g
1
: zðkÞ
P
N
i¼kþ1
vðiÞdtb0
g
2
: R
a
ðNÞR
a;max
b0
g
3
: rðNÞr
max
b0
g
4
:
P
N
i¼1
vðiÞdt Q
btol
g
5
: u
l
uðkÞb0 for all k ¼ 1; :::; K
g
6
: uð kÞu
u
b0 for all k ¼ 1; :::; K
(6.23)
where the inequality g
1
defines the depth of thermal damage limit above a critical
temperature referred to as “workpiece burn”; inequality g
2
defines the surface
roughness requirement; g
3
defines the out-of roundness at the end of the cycle
and r
max
is its maximum allowable value; g
4
defines the size requirement and the
last two constraints represent limitations on the machine infeed rate where u
l
is the
lower bound and u
u
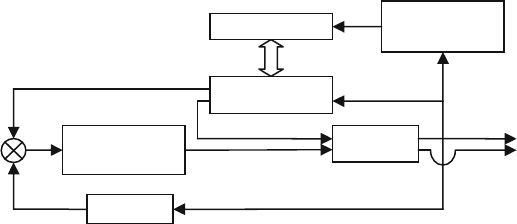
is the upper bound. A schematic diagram of the corresponding
control system is shown in Fig. 6.15. The core part is the block named “optimiza-
tion” whose task is to identify the state of the cycle using measurement data of
power and size and then compute the desired infeed rate v
d
. The controller can be
bypassed at first and last grinding sections, because the command infeed rate should
Process Model
Parameter
Estimation
Optimization
Process
PI Controller
Filter
Power, Size
+
-
V
d
V
u
u
v
or 0
Surface Roughnes
s
Fig. 6.15 Schematic diagram of the on-line control strategy
6 Traditional and Non-traditional Control Techniques for Grinding Processes 287
be at its maximum allowable limit for the first section of the cycle and at zero for the
last. The actual infeed rate v is obtained on-line from size measurements, and
parametric values of the time constant t and the effective wear flat area A
eff
can
be estimated in the block “parameter Estimation” from measurements of power and
size. Moreover, the control system uses feedback from power and size to compen-
sate for modeling uncertainty caused by parameter variations and external distur-
bances.
This kind of control system seeks to adjust operating condition according to
a predefined performance index in order to optimize the grinding process during
real-time operation. The identified process models allow to predict workpiece
burn and estimate the compliance of the workpiece-tool-machine system. The
drawback of such control strategy is that some para meters cannot easily be
measured online, e.g., surface roughness is often measured off-line, and hence is
not controllable with such a scheme. In addition, the optimization calculation load
is usually heavy for multiple process goals with multiple input/output constraints
during online operation and the optimal solutions largel y depend on a carefully
selected initial condition, which needs to be determined by experienced operators.
Based on optimal control theory, Malkin and Koren [31] derived an accelerated
spark-out method by reducing the time required to recover the accumulated elastic
deflection in the system and therefore the cycle time was successfully minimized in
cylindrical plunge grinding processes. And this optimal control policy is particu-
larly advantageous for grinding systems having a long characteristic time constant.
It has been proposed by Malkin [5] that this accelerated spark-out method can be
beneficial to incorporate into the Adaptive Control Optimization (ACO) system in
optimizing the grinding and dressing parameters for maximum Material Removal
Rate (MRR) within constraints on workpiece burn and surface finish. Grinding
processes are complex in nature with multiple cutting points, which are defined by a
large number of grits possessing irregular shapes, sizes and spacing. Inevitable
variations of the tool position, velocity and force fluctuation heavily affect the final
part’s geometry accuracy, surface finish, and the overall process Material Removal
Rate (MRR). Moreover, various uncertainties and disturbances inherently exist in
the process. It is therefore necessary to control the grinding process under various
system variations. Jenkins et al. [17] presented a robust controller for a grinding
system where the normal grinding force was decoupled from the tangential feed
velocity of the system. Two separate control loops were designed as a standard feed
velocity loop and a force loop, so that the two variables could be controlled
simultaneously. A variet y of other system performance specifications were success-
fully achieved, such as reduced overshoot value and transient settling time. The
objective of the compensator design is to control the force and velocity to
meet specifi c target while simultaneously decoupling the feed velocity from the
normal grinding force.
The grinding system used in this work consists of a three-axis prismatic servo
stage, which is controlled by a programmable multi-axis controller (PMAC). The
controlled grinding system has two input trajectories, desired force and velocity,
and two outputs, act ual force and velocity. A least squares parameter estimation
288 J. Liu et al.
technique (ARX, autoregressive external input, Ljung, L. [32]) is used to determine
the transfer function between the input commands and the outputs, and analyze step
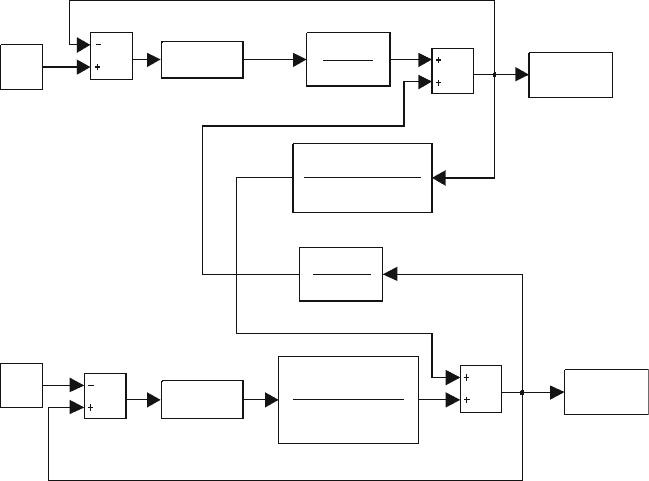
commands in force and velocity. The block diag ram of the closed-loop system with
the appropriate transfer functions is shown in Fig. 6.16.
For the compensator design, a PID-type controller form is selected for imple-
mentation in both the velocity and force loops. In this case, by increasing the
forward loop gain, cross coupling between force and velocity is easily decoupled.
In general, many parameters needed for designing a new compensa tor in similar
application circumstances can be gained by using the control design tools and
procedures in this work.
6.6 Intelligent Control Techniques
Although various adaptive and robus t control techniques have been studied to
maintain the desired closed loop performance in the pres ence of parameter varia-
tions and process uncertainties, they often encounter difficulties in actual design
when the system dynamics are not well known. In addition, in the control process,
all the necessary coefficients of the controller need to be calculated and updated on-
line, which makes the computation burden quite heavy. In contrast, intelligent
controllers based on neural networks and fuzzy logic are attractive alternatives
output 2
F
output 1
V
Vd1
1
Vd
1
SUM4
SUM3
SUM1
SUM
H2
-1.84
s+0.0058
H1
s
2
+32.34s+1149.4
1.625
Gv
s+0.007
0.8252
Gf
s
2
+15.33s+249.2
156
Gcv Subsystem1
In1
Out1
Gcv Subsystem
In1 Out1
Fig. 6.16 System block diagram
6 Traditional and Non-traditional Control Techniques for Grinding Processes 289
since they do not require precise mathemat ical models. The information from
human experts and experimental data could be extracted and formulated in the
control law design, which make these intelligent control techniques most suitable
for precision grinding and other abrasive processes, since the current industrial
practices heavily rely on experienced human operators in order to achieve the
desired results. By incorporating operators’ skills and knowledge, the following
grinding activities can be possibly performed by intelligent systems, such as:
l
Controlling the final part’s surface roughness
l
Preventing burning on the final part’s surface
l
Compensating for grinding machine and process variations
l
Reducing grinding vibration and chatter
l
Determining an appropriate dressing interval for grinding wheel
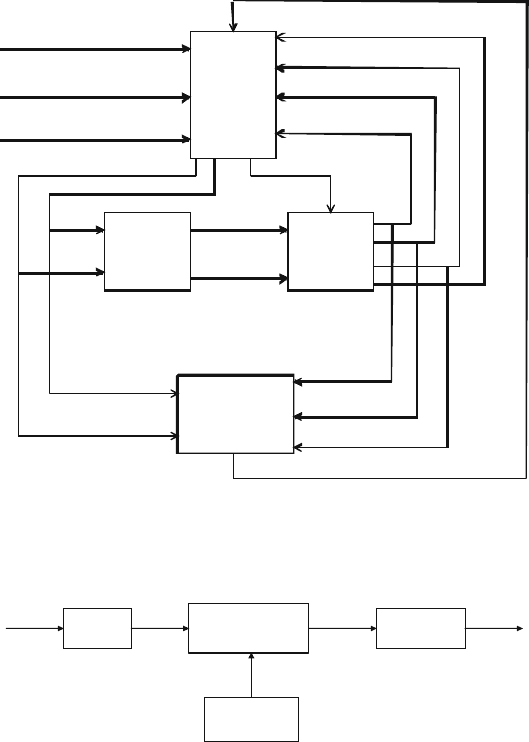
Rowe et al. [33, 34] provided an extensive review on different intelligent control
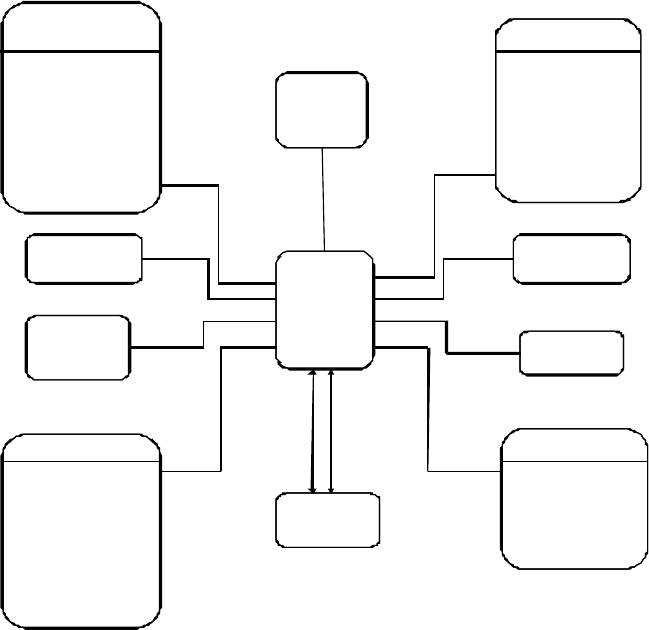
techniques in grinding processes. This review describes the object-oriented devel-
opment method of the generic intelligent control system for grinding based on the
proposed modular conceptual framework (as Fig. 6.17), also reviews previous work
towards intelligent grinding control and summarizes the previously used strategies
and introduces the structure and operation of the generic intelligent control system.
The most common practical operations are for external and internal cylindrical
grinding due to the lack of accurate analytical models or incomplete information
about the processes, where the intelligent control technologies emerged to be
promising when the conventional methods often fail. The trend of increasing
usage of machine intelli gence in grinding systems and operations is clearer and
more researchers are working in this area nowadays. A most significant reas on is
that the human specialist knowledge and lessons grained from previous operations
can be incorporate in the controller design to ensure a better system performance for
the future operations. A conceptual framework for a typical intelligent grinding
machine is illustrated in Fig. 6.17, where all essential elements have been tested and
integrated into practical gri nding systems.
Above conceptual framework provides a general guide to the design of the
intelligent control system. Of all the components, the executor plays the central
role, which is basi cally a software drive, capable of selecting relevant software
modules and integrating them to form an intelligent control system for a specific
grinding process following predetermined rules. Besides, it consists of several other
components, including I/O routines, process models and rules, a database, an
intelligent parameter selection system, typical grinding cycles, safety strategies,
adaptive strategies and learning strategies.
Nakajima et al. [35] presented a neuro & fuzz y in-process control technique for
plunge grinding processes, where a back-propagation neural network was built up
to predict the surface roughness during the process. The infeed rate to the speed
ratio was controlled and the grinding efficiency was optimized with the desired final
surface roughness, independent of the wheel surface condition. Xiao and Malkin
[25] proposed an intelligent grinding system, where the system used power and the
part size information (which was measured online) as the feedback signal to
290 J. Liu et al.
estimate and optimize the grinding performance for the next workpiece part.
Additionally, the intelligent controller took the surface roughness and roundness
measured during post-process to adjust the dressing feedrate and also identified the
process to minimize the cycle time. The com bined online system identification and
the meta control ensured the resultant system intelligence. The integrated intelligent
grinding system is illustrated in Fig. 6. 18 .
The fuzzy technique has been recognized and utilized to control complex
grinding processes since early 1980s. The basic idea of a fuzzy inference system
is to incorporate human’s knowledge into a set of fuzzy IF-THEN rules, which
involve operations on linguistic variables. The general fuzzy infere nce system can
be shown in Fig. 6.19, which consists of four components as: a fuzzifier, a fuzzy
rule base, a fuzzy inference engine and a defuzzifier.
Zhu et al. [26] did the first implementation of a fuzzy controller to obtain
the desired surface finish by controlling the workpiece feedrate without any mathe-
matical model. Zhao and Webster [14] applied fuzzy pattern recognition to the
Executor
Input/
output
routines
Grinding
machine
DATA BASE
Part programs
Wheel data
Material data
Workpiece data
Coolant data
Learned values
Default values
Selection
strategy
Safety
strategy
DATA LOGGER
Production
Information
Process
Information
PROCESS
MODELS & RULES
Kinematics
Thermal
Surface texture
Compliance
Chatter
Roundness
Wheel wear
dressing
Adaptive
strategy
Database
learning
strategy
CYCLES
Set feedrate
Multiple feedrate
Pecking cycle
Adaptive feedrate
Overshoot
Adaptive power
Adaptive offset
dressing
Axis
control
Sensors
Power
Size
vibration
Fig. 6.17 Conceptual framework for a typical intelligent grinding machine
6 Traditional and Non-traditional Control Techniques for Grinding Processes 291
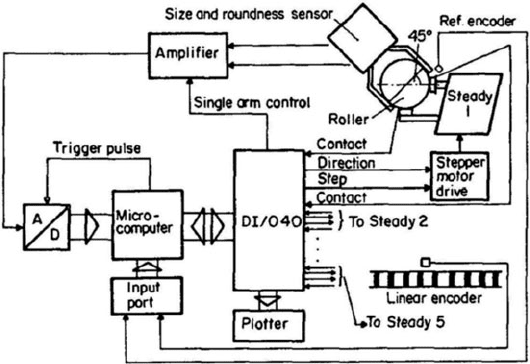
automatic control of roller grinding processes. This adaptive control strategy
could eliminate the highly skilled, time consuming and tedious task of manually
adjustment of supporting steadies. The method is based on microcomputer con-
trolled in-process size measurement techniques and enables faster and more
accurate grinding, replacing the experienced operators by an expert system.
The experimental results showed that this approach yielded a more reliable and
more accurate result than an experienced operator could.
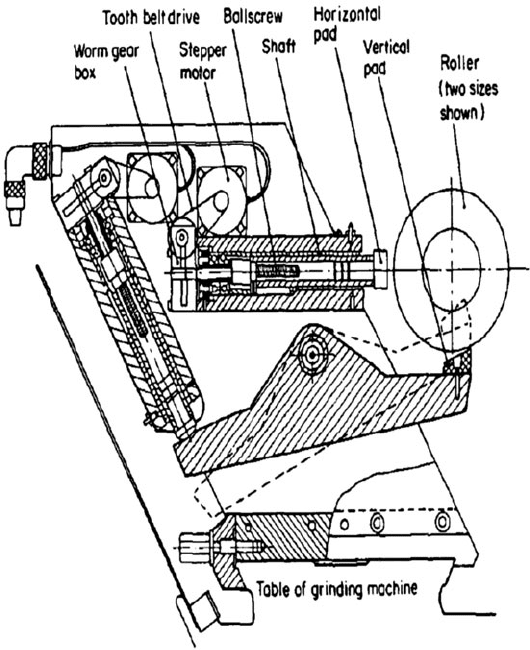
The hardware layout of the system is shown in Fig. 6.20, in which five studies are
adopted, each of which is shown in Fig. 6.21, has a horizontal and a vertical pad
driven by separate stepper motors.
Meta
control
Axis
control
Grinding
machine
v
f
v
w
System
identification
u(t)
u(t)
v
w
v
w
size
power
surface roughness
size
power
surface roughness
out of roundness
size tolerance
max surface roundness
max out of roundness
Fig. 6.18 Intelligent grinding machine
Fuzzy Inference
Engine
fuzzy
input
fuzzy
output
DefuzzifierFuzzifier
Fuzzy Rule
Base
crisp
input
crisp
output
Fig. 6.19 General structure of a fuzzy inference system
292 J. Liu et al.
This computer control system using fuzzy pattern recognition has the following
advantages:
(1) Reduces the dependence on operator’s grinding experience and measuring skill
by computer intelligence, thereby de-skilling the roller grinding operation
(2) It is more accurate and reliable to use the relative adjustments of the pads
oriented by fuzzy pattern recognition than given by operators in accordance
with their experience. Thus, it would be expected the roller form errors will be
corrected in much fewer grinding passes, namely, sooner to achieve fine steady
state error
(3) Reduces machin ing time as well as machining cost and make the operator’s
work easier and enables supervision of two or more machines simultaneously
Chen and Shin [36], Lee et al. [37] designed and implemented an intelligent and
robust grinding process advisory system with fuzzy logic inferencing. The surface
grinding process was automatically optimized using analytical grinding process
models and heuristic knowledge without human intervention. The optimization
procedure is presented using seven analytical models and heuristic knowledge
base. These seven most representative and important models for surface grinding
operation are: chip model, energy model, force model, surface finish model, stress
model, temperature model and safety model, which are highly non-linear. In some
cases, they are only useful for predicting approximate values due to the complexity
of the underlying unknown physical mechanism. That’s why the fuzzy heuristic
rules and fuzzy inferencing are employed to represent the input and output relation-
ships and to perform the optimization process. Therefore, the ambiguity of any
physical quantity is described in terms of membership functions and fuzzy
Fig. 6.20 Hardware layout of the computer control system for roller grinding
6 Traditional and Non-traditional Control Techniques for Grinding Processes 293
inferencing, and approximate but robust solutions can be generated based on this
fuzzy model. Moreover, a novel rule generat ion mechanism has been developed to
convert the grinding models into fuzzy linguistic rules, which can be used generi-
cally with any grinding model in a wide operating range. This auto matic rule
generation mechanism also allows for the optimization of a grinding process
without user intervention. Consequently, by autonomously selecting proper process
conditions and operating parameters which can be monitored on-line, the system
can be used as a tuning controller of a gri nding process.
Lees’s work is an implementation of the above model-based optimization
scheme. In order to achieve, process models for grinding force, power, surface
roughness, and residual stress are developed and grinding optimization is consid-
ered as constrained nonlinear optimization problems with mixed-integer variables
and time-varying characteristics. The model-based optimization scheme has been
Fig. 6.21 Structure of steadies for roller grinding
294 J. Liu et al.