Иванов Ю.И., Югай В.Я. Технические средства автоматизации и управления: Методическое руководство к лабораторным работам
Подождите немного. Документ загружается.

3
3
1
1
являются случайными сигналами и, как следует из приведенного
выше выражения, могут вносить существенные и недопустимые
изменения в состояние объекта управления. Например, для
систем стабилизации (Xвх(t)=const) выходная координата Y(t)
непостоянна и изменяется под воздействием помех. Очевидно,
что получение заданных свойств требует применения в системах
управления специальных мер для ослабления помех [3].
Ошибки
преобразования аналого-цифровых преобразовате-
лей, связанные с процессом квантования сигнала, также можно
интерпретировать как помехи. В этой связи возникает задача
определения истинного значения сигнала. С этой целью приме-
няют различные методы усреднения или сглаживания сигналов.
Разделение информационных сигналов и сигналов помех
чаще всего основано на их различном спектральном составе.
Если
в спектре сигнала помехи содержатся только высокочас-
тотные составляющие, то их можно удалить или значительно
ослабить, применив аналоговый или цифровой фильтр. В про-
тивном случае, если спектры информационного сигнала и помех
перекрываются, необходимо выполнять экранирование уст-
ройств или применять другие схемотехнические решения, менее
чувствительные к помехам.
Из практики построения систем
автоматического управле-
ния известно, что информация о состоянии объекта управления
содержится в самых низкочастотных составляющих спектра
сигнала и что этот спектр расположен в пределах от 0 до 300 Гц.
В этой связи спектральные составляющие выше 300 Гц можно
отнести к помехам.
В реальных объектах спектр информационных сигналов
может быть значительно ниже 300 Гц. Так
, например, в систе-
мах термостабилизации он находится в диапазоне от 0 до 0,01 –
0,1 Гц. В этом примере к помехам можно отнести спектральные
составляющие, лежащие выше 0,01 – 0,1 Гц. Из вышесказанного
следует, что фильтр
Ф должен иметь амплитудно-частотную
характеристику (АЧХ) типа фильтра нижних частот (ФНЧ), а

3
3
2
2
частота среза его АЧХ должна совпадать с наивысшей частотой
спектра информационного сигнала.
Обобщенная передаточная функция цифрового фильтра
записывается в виде отношения полиномов:
1...
...
)(
)(
)(
1
1
)2(
2
)1(
1
0
1
1
)2(
2
)1(
1
+++++
+++++
=
==
−−−
−
−−
−
−
−−−
−
−−
−
−
zbzbzbzb
azazazaza
zX
zY
zF
m
m
m
m
m
m
n
n
n
n
n
n
. (1)
Фильтр, реализованный по передаточной функции (1), назы-
вается авторегресионным фильтром скользящего среднего с
бесконечной импульсной характеристикой (БИХ) [4].
Если в (1) все коэффициенты
i
b равны нулю, то фильтр
называется фильтром скользящего среднего с конечной им-
пульсной характеристикой (КИХ). Передаточная функция тако-
го фильтра
0
1
1
)2(
2
)1(
1
...)( azazazazazF
n
n
n
n
n
n
+++++=
−−−
−
−−
−
−
. (2)
Наиболее простая реализация КИХ-фильтра получается,
если в выражении (2) коэффициенты выбрать равными, причем
для обеспечения коэффициента передачи фильтра на постоян-
ном токе, равном 1, их сумма также должна быть равна 1. Тогда
формула (2) преобразуется к виду:
∑
−
=
−
=
1
0
1
)(
N
n
n
z
N
zF . (3)
Фильтр, реализованный по формуле (3), называется N-
точечный фильтр скользящего среднего.

3
3
3
3
В качестве примера рассмотрим свойства 5 – точечного
фильтра скользящего среднего. Подставляя в (3) N=5, находим
его передаточную функцию
)1(2.0)(
1234
++++=
−−−−
zzzzzF . (4)
Для реализации цифровым устройством передаточной
функции (4) необходимо перейти к разностному уравнению
[]
5
))())3((())4(((
)(
kTxTkxTkx
kTy
+
+
−
+
−
=
L
. (5)
Это соотношение связывает выходную последовательность
)(kTy с входной )(kTx и ее предыдущими значениями
)))1(( Tkx −
,
)))2(( Tkx
−
, . . . .
Для вычисления выходной последовательности по формуле
(5) требуется выполнить пять математических операций – четы-
ре сложения и одно умножение. В общем случае для N-
точечного фильтра необходимо выполнить N-1 сложение и одно
умножение. Существует и более короткий алгоритм.
Если в цифровом устройстве запоминать в отдельном реги-
стре сумму, заключенную в квадратные скобки в
выражении (5),
то для вычисления следующего значения выходной последова-
тельности необходимо от этой суммы вычесть наиболее старое
значение входной последовательности, к полученному значению
прибавить следующее значение входной последовательности и
полученную сумму умножить на коэффициент 0,2. Причем эта
процедура справедлива для любого N-точечного фильтра, т.е.
для вычисления значения выходной последовательности N-
точечного фильтра
требуется выполнить всего три математиче-
ских операции – одно вычитание, одно сложение и одно умно-
жение.
АЧХ 5 – точечного фильтра скользящего среднего с интер-
валом дискретизации T=1 мс (частоте дискретизации 1 кГц)
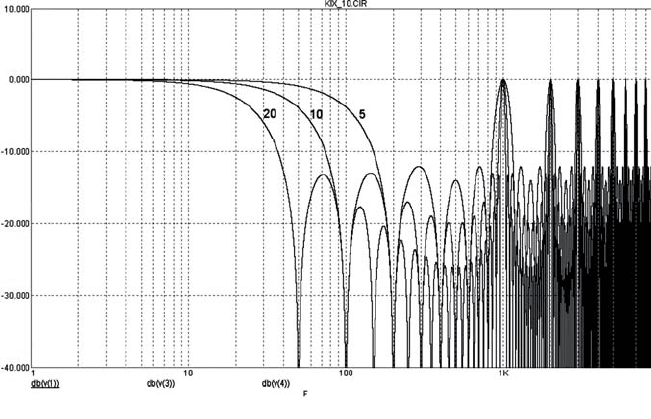
3
3
4
4
приведена на рис. 11. Для сравнения на этом же рисунке приве-
дены АЧХ 10 – и 20 – точечных фильтров.
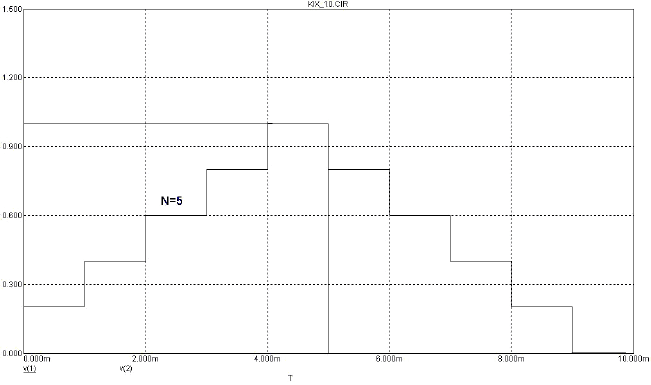
Переходная характеристика КИХ-фильтров, в отличие от
БИХ-фильров, при любом выборе коэффициентов не имеет
выброса. Существенно также и то, что время реакции фильтра
на ступенчатое воздействие от 0 до 100% равно произведению
общего количества точек фильтра
на период дискретизации. Это
показано на рис. 12 в виде реакции 5 – точечного фильтра сколь-
зящего среднего на видеоимпульс.
Рис. 11. АЧХ 5 –, 10 – и 20 – точечных фильтров скользящего
среднего
В отличие от аналоговых фильтров АЧХ цифровых фильт-
ров имеют периодический характер. Еще одной особенностью
КИХ-фильтров является то, что затухание АЧХ в полосе задер-
живания имеет всплески. Первый всплеск АЧХ 5 – точечного
фильтра примерно равен 11 дБ, а 20 – точечного – 13,5 дБ, т.е. с
увеличением числа точек фильтра значительного увеличения
3
3
5
5
затухания АЧХ не наблюдается. Необходимо обратить внимание
на то, что ширина основного лепестка АЧХ с увеличением по-
рядка передаточной функции фильтра скользящего среднего
существенно уменьшается (рис. 11).
Рис. 12. Реакция 5 – точечного фильтра скользящего среднего на
видеоимпульс
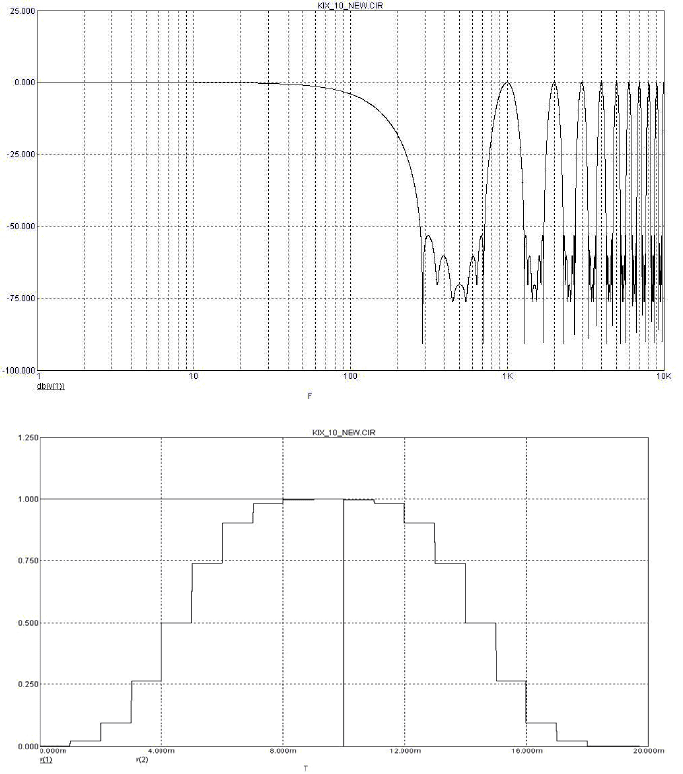
В КИХ-фильтре значительное увеличение затухания АЧХ в
полосе задерживания может быть достигнуто за счет
выбора
неравных коэффициентов
i
a . Так, например, КИХ-фильтр Кай-
зера (Kaiser) с передаточной функцией
001001.001848,007556.0
1661,02388,02388,0z1661,0
07556,001848,0001001,0)(
12
3456-
789
+++
+++++
+++=
−−
−−−
−−−
zz
zzz
zzzzF
, (6)
имеет АЧХ, приведенную на рис. 13.
3
3
6
6
Из анализа графика реакции фильтра Кайзера на видеоим-
пульс (рис. 14) видно, что его переходная характеристика также
не имеет выброса, а величина ступенек непосредственно связана
с численными значениями коэффициентов передаточной функ-
ции (6).
Рис. 13. АЧХ фильтра Кайзера
Рис. 14. Реакция фильтра Кайзера на видеоимпульс

3
3
7
7
Очевидно, что помехи таким фильтром будут значительно
сильнее подавлены. Однако, из-за большого объема вычисли-
тельных операций (см. выражение (6)) реализовать такое уст-
ройство на основе 8-битного микроконтроллера затруднительно.
Выше было отмечено: если в знаменателе передаточной
функции (1) хотя бы один из коэффициентов
i
b не равен нулю,
то такой фильтр называется БИХ-фильтром. Когда единствен-
ный коэффициент
1
b
не равен нулю, БИХ-фильтр имеет переда-
точную функцию первого порядка
1
)(
)(
)(
1
1
0
+
==
−
zb
a
zX
zY
zF
. (7)
Разностное уравнение, определяющее выходную последова-
тельность такого фильтра, имеет вид
)())1(()(
01
kTxaTkybkTy
+
−
=
. (8)
Коэффициенты в последнем выражении обычно выбирают
следующими:
λ
=
1
b
и
λ
−
=
1
0
a , тогда
)()1())1(()( kTxTkykTy
λ
λ
−
+
−
=
. (9)
Фильтр, реализованный в соответствии с разностным урав-
нением (9), называют авторегрессионным фильтром скользяще-
го среднего первого порядка или экспоненциальным фильтром.
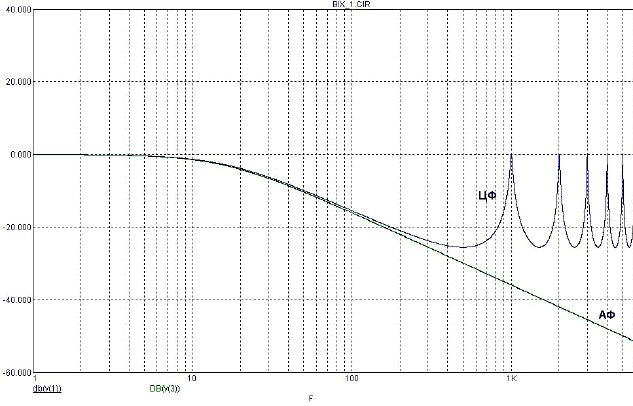
В отличие от КИХ-фильтров, у БИХ-фильтров существуют
их прототипы (аналоги) в аналоговых фильтрах. На рис.15 при-
ведены АЧХ экспоненциального фильтра (с параметром
9.0
=
λ
и частотой дискретизации кГцf
s
1
=
) и аналогового фильтра с
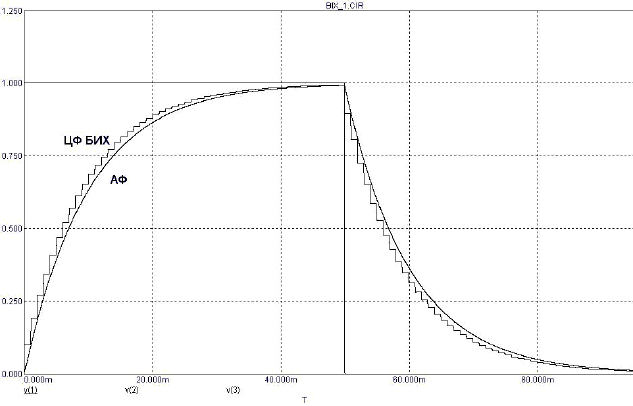
эквивалентными параметрами, а на рис. 16 показаны их реакции
3
3
8
8
на прямоугольный импульс. Из анализа графиков видно, что
существенное различие между АЧХ цифрового (ЦФ) и аналого-
вого (АФ) фильтров начинается на частотах равных 2/
s
f и
выше.
Рис. 15. АЧХ аналогового и цифрового фильтров первого поряд-
ка
В соответствии с теоремой Котельникова для “правильной
работы” цифрового фильтра спектральный состав его входного
сигнала должен быть ограниченным. При частоте дискретизации
1 кГц в спектре входного сигнала не должно быть частот выше
0,5 кГц. Причем здесь речь идет
о спектре входного сигнала,
состоящего из суммы информационного сигнала и сигнала по-
мехи. Если спектральный состав сигналов заранее неизвестен, то
на входе цифрового фильтра рекомендуется устанавливать ог-
раничитель спектра – аналоговый фильтр нижних частот.
3
3
9
9
Рис. 16. Реакция аналогового и цифрового фильтров на видео-
импульс
Порядок выполнения лабораторной работы № 2:
1.
Используя программные модули лабораторной работы № 1,
реализовать в микроконтроллере один из следующих алго-
ритмов цифровой фильтрации:
•
8-точечный фильтр скользящего среднего (для бригад
1и 4),
•
16-точечный фильтр скользящего среднего (для бри-
гад 2 и 5),
•
экспоненциальный фильтр (для бригад 3 и 6).
2.
Для схемы исследований, приведенной на рис. 9 (лаборатор-
ная работа № 1), изменяя частоту синусоидального сигнала
на выходе генератора, снять АЧХ фильтра.
4
4
0
0
3. Установить на выходе генератора форму сигнала “меандр” с
периодом импульсов 50 мс и наблюдать переходную харак-
теристику с помощью осциллографа.
4.
По результатам выполнения работы оформить отчет, сделать
выводы.
Примечание. Для выполнения арифметических операций могут
использоваться стандартные подпрограммы, приведенные в
приложении 2