Hassani S. Mathematical Physics: A Modern Introduction to Its Foundations
Подождите немного. Документ загружается.

2.1
ALGEBRA
OF
L(V)
51
2.1.5.
Example.
Let the linear operator T : lit
3
-+
lit
3
be definedby
T(xl.
x2, X3) = (Xl+X2, X2+x3, xl +x3)·
We wantto see whetherT is invertible and,
if
so, find its inverse. Thas an inverseif and
onlyif itis
bijective.
By the
comments
after
Theorem
1.3.8thisis thecase
if
andonlyif T
is
either
surjective
or
injective.
The
latter
is
equivalent
tokefT =
IO}.
ButkefTis theset
of all vectors satisfyingT(XI,
x2,
X3) = (0,0, 0), or
Xl
+X2
=0,
X2+X3
=0,
The
reader
maycheckthatthe
unique
solutionto these
equations
is
xi
= x2 = x3 =
o.
Thus,
theonly
vector
belonging
tokefTis thezero
vector.
Therefore,
Thasan
inverse.
Tofind r
l
applyT-IT
= 1 to
(XI,X2,X3):
(xj , X2, X3) =
T-IT(xl.
X2, X3) =T-I(XI +X2, X2 +x3, Xl +X3)·
This equationdemonstrates how
T-
1
acts on vectors.Tomakethis more
apparent,
we let
Xl +X2 = x, X2 +X3 =
y,
Xl +x3 = z, solvefor
Xl,
x2, andX3 in terms of x, y, andz,
and
substitute
inthe
preceding
equation
to
obtain
rl(x,y,z)
=
!(x
-
y+z,x
+y
-z,
-x
+
y+z).
Rewriting
this
equation
in
terms
of
Xl,
x2. andX3 gives
T-
I(XI,X2,X3)
= !(XI
-x2
+x3,XI
+x2
-x3,
-Xl
+x2
+X3)'
Wecaneasily verifythat
T-
1T
=1 andthatTT-
1
= 1.
III
The following theorem, whose proof is left as an exercise, describes some
properties
of
the
inverse operator.
2.1.6.
Theorem.
The inverse
of
a linear operator is unique.
1fT
and
S are two
invertible linear operators, then
TS is also invertible,
and
An endomorphism T : V
--->
V is invertible if and only if it carries a basis
of
V
onto another basis
ofV.
2.1.1 Polynomialsof Operators
With
products
and
sums
of
operators
defined,
we
can
construct
polynomials
of
operators. We define
powers
of
T inductively as T
m
=
TT"'-l
=
Tm-IT
for all
positive integers m
:::
I.
The
consistency
of
this
equation
(for
m = I)
demands
that
orO
= 1.
It
follows
that
polynomials
such
as
p(T)
= "01 +
"IT
+"2T2 +...+
"n
T"
can
be defined.
I
ODTO
l'WnJRJ'ROiANES!
M. E. T. U.
USRARY
52 2.
OPERATOR
ALGEBRA
2.1.7.
Example.
Let
TO
:
IR
2
--+ ]R2 be the
linear
operator
that
rotates
vectors
in the
xy-plane through the angle 0, that is,
Te(x,
y) = (x coss - y sin e',x slns + y cos
s).
Weareinterested inpowersof T
e:
x'
y'
T~(X,
y) = Te(x coss - y sine',x stn s + y ccs
s)
= (x' coss - y'sine, x' sine +y'cosB)
=
«x
cos s - y sin s) cos s - (x
sinf
+y
coae)
sine,
(x cos s - y sinO) sins +(x sinO +
ycos
sj
cos
s)
= (x cos 20 - y sin 20, x sin20 + y cos20).
Thus,
T
2
rotates (x, y) by 20. Similarly, one can show that
T~(X,
y) = (x cos 30 - y sin 30, x sin 30 +
ycos30),
andin
general,
l"9(x,
y) = (x cosnB - y sinnB,x sinnB+y cosn(J). whichshows
that
19
is a
rotation
of (x, y)
through
theangle
ntJ,
thatis,
TO
= T
nO.
Thisresultcouldhavebeen
guessed
because
TO
is
equivalent
to
rotating
(x, y) n times,eachtimebyananglee.
III
Negative
powers
of
an
invertible
linear
operator
T are
defined
by
T-
m
(T-I)m.
The
exponents
of
T satisfy
the
usual
rules. In particular, for any
two
integers m
and
n (positive
or
negative), TmT
n
=
~+n
and
~)n
= r
nn
.
The
first
relation
implies
that
the
inverse
of
T
m
is
T-
m
.
One
can
further
generalize
the
exponent
to
include
fractions
and
ultimately
all
real
numbers;
but
we
ueed
to
wait
uutil
Chapter
4, in
which
we
discuss
the
spectral
decomposition
theorem.
2.1.8. Example. Letus evaluate
Tin
forthe
operator
of the
previous
example.
First,
let
usfind
Tel
(seeFigure 2.1).Wearelooking for an operator sucbthat
Tel
Te(x, y) =(x,
y),
or
Tel
(x cos s - y sine',x sinO +y cos
s)
= (x, y).
(2.1)
We define x' = x cos () - ysin eand y' =x sin e+y
cos
eand solve x and yin terms
of
x' andy'to
obtain
x = x' cose+
y'
sin
(J
andy=
-x'
sine
+./
cos
e.
Substituting
forx
and y in Equation (2.1) yields
T01(X', y') = (x'
cose
+y'sine,
-x'
sine +y' cose).
Comparing
thiswiththe actionof T8 inthe
previous
example,
we discover
that
theonly
difference betweenthe two
operators
is thesign of the sineterm, Weconclude
that
TO
1
hasthesameeffectasT
-8'
So wehave
and
-n
(T-I)n
(T )n
T
8
= 8 =
-8
=T_
n8·
2.1
ALGEBRA
OF
L(V)
53
"J8Cx,y)
(x,y)
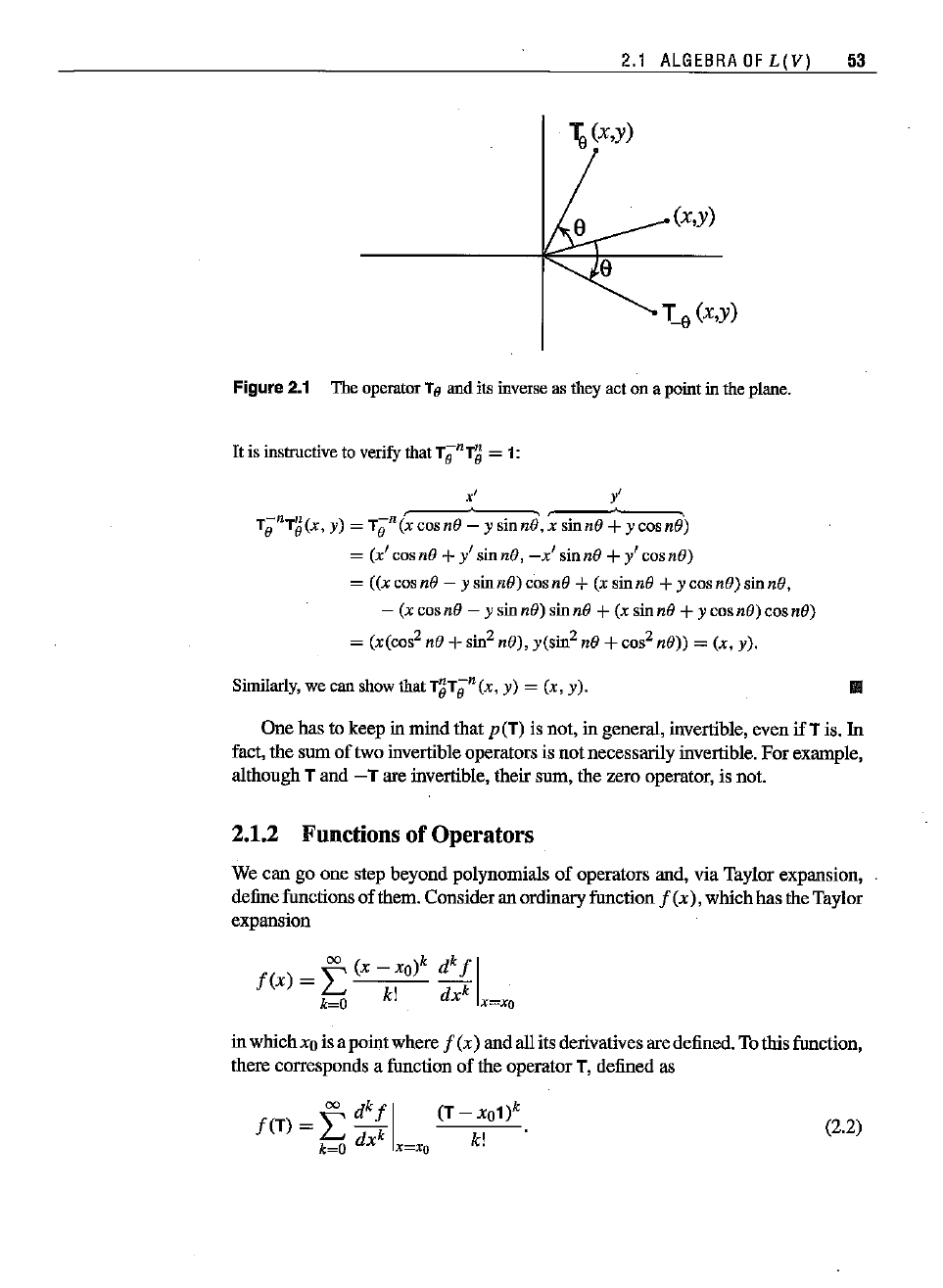
Figure 2.1 The
operator
T(;I andits
inverse
astheyacton apointintheplane.
It is
instructive
to verifythatTi
n
T9
= 1:
x'
y'
TinT'J(x, y) = T(in(xcosn(} - y sin
nO',
x
sinne
+y cosn(})
= (x'
cosn8
+ y' sinnB,
-x'
sinnB+y' cos nO)
=
«x
cosnB - y sinnB)
cosnf:J
+ (x sinn() + y cosn(}) sinne,
- (x cos
nO
- y sin nO)sin
nrJ
+(x sin n() +y cos
nfJ)
cosnB)
= (x(cos
2
nO+sin
2
nO), y(sin
2
nO+cos
2
nO)) = (x, y).
Similarly, we can showthat T,JTiJn(x, y) = (x, y).
l1li
One
has to keep in
mind
that p (T) is not, in general, invertible, even
if
T is.
In
fact, the snm
of
two invertible operators is
not
necessarily invertible.
For
example,
although T and
-Tare
invertible, their sum, the zero operator, is not.
2.1.2 Functionsof Operators
We can go one step beyond polynomials
of
operators and, via Taylor expansion,
define functions
of
them. Consideran ordinaryfunction f
(x),
whichhas the Taylor
expansion
00
(x -
xO)k
d
k
f I
f(x)
= L ,
-k
.
k=Q k. dx
x=xo
in whichxo is apointwheref
(x)
and all its derivatives are defined. Tothisfunction,
there corresponds a fnnction
of
the operator T, defined as
f(T)=fdk{1
(T-
x
ol )k
k=O dx
x=xo
k!
(2.2)
(2.3)
(2.4)
54 2.
OPERATOR
ALGEBRA
Becausethisseriesisan
infinite
sumof
operators,
difficultiesmay
arise
concerning
its convergence. However, as
will
be
shown
in
Chapter
4, f (T) is always defined
for
finite-dimensional vector spaces. In fact, it is always a polynomial
in
T.
For
the
time
being, we shall
think
of
f (T) as a formal infinite series. A simplification
results
when
the
function
can
be
expanded
about
x =
O.
In
this case we obtain
00
dkfl
Tk
f(T)
= L d k -k'.
k~O
x
x~O
.
A
widely
used
function is the exponential,
whose
expansion is easily found to be
00
Tk
e
T
'"
exp(T) =
L-'
k~O
k!
2.1.9.
Example.
Let us evaluateexp(aT) wheu T :
][l.2
-+
][l.2
is givenby
T(x,y)
=
(-y,x).
Wecan finda generalformulafor the action
ofT
n
on
(x, y). Start with n =2:
T
2(x,
y) =
T(-y,
x)
=
(-x,
-y)
=
-(x,
y) =
-l(x,
y).
Thus,
T
2
=
-1.
From
TandT
2
we caneasily
obtain
higher
powers
of T.For
example:
T
3
= T(T2)=
-T,
'f'I
= T
2T2
= 1, and in general,
T
2n
=
(-I)nl
T
2n+
1
=
(-I)nT
Thus,
for n =0,
1,2,
.
forn
=0,
1,2,
.
(aT)n (aT)n
00
(aT)2k+l
00
(aT)2k
exp(aT) = L
-,-
+ L
-,-
= L ,+ L
--,
n odd n. n even n.
k=O
(2k +
I).
k~O
(2k).
00
a2k+lT2k+l
00
a2kT2k
00
(_lla2k+1
00
(_I)k
a2k
=L
,
+L--,
=L
I
T+L
, 1
k=O
(2k +I).
k~O
(2k). k=O (2k +I).
k~O
(2k).
00
(_I)k
a2k+l
00
(_I)k
a2k
=TL
,
+lL
"
k~O
(2k + I).
k~O
(2k).
Thetwo
series
are
recognized
assina andcosa.
respectively.
Therefore,
we get
eaT
=Tsina +1cosa,
whichshows
that
eaT
is a
polynomial
(of first
degree)
inT.
The action of eaTon (x, y) is given by
e·
T
(x, y) = (sinaT + cos
ut)
(x, y) =sin
aT(x,
y) + cos
«t
(x, y)
=
(sina)(-y,
x)
+
(cosa)(x,
y)
=
(-y
sin
a,
x sin
a)
+(x cosa,
ycosa)
= (x
cosa
- y sin
a,
x sina +y
cosa).
2.1 ALGEBRAOFL(V) 55
The readerwill recognize the final expressionas a rotationin the xy-planethrough an angle
a.
Thus, we can
think.
of eaT as a rotation operator of angle a about the z-axis. In this
contextT is called the generator of the rotation. II
2.1.3 Commutators
The result of multiplication of two operators depends
on
the order in which the
operators appear. This means
thatifT,
U E .G(V),then TU E
.G(V)
and UTE .G(V);
however, in general UT
i=
TU. When this is the case, we say that U and T do
not commute. The extent to which two operators fail to commute is given in the
following definition.
commutator
defined
2.1.10. Definition. The commutator [U,T]
of
the two operators U
and
T in .G(V)
is another operator in
.G
(V), defined as
[U,T] es
UT-TU.
An immediate consequence
of
this definition is the following:
2.1.11. Proposition. For S, T, U E .G(V)and a,
fJ
E
IC
(or
ffi.),
we have
[U, T] =
-[T,
U],
[aU,
fJn =
afJ[U,
no
[S,
T+
U]= [S, T] + [S, U],
[S+T,
U]= [S, U]+ [T, U],
[ST, U]= S[T, U]+ [S, U]T,
[S,
TU]
= [S, T]U+ T[S, U],
[[S, T], U]+ [[U,S], n+ [[T, U], S] = O.
antisymmetry
linearity
linearity in the right entry
linearity in the left entry
right derivation property
left derivation property
Jacobi identity
Proof
In almost all cases the prooffollows immediately from the definition. The
only minor exceptions are the derivation properties. We prove the left derivation
property:
[S, TU]
=S(TU) - (TU)S =STU- TUS+ TSU - TSU
'-v-'
=0
= (ST - TS)U+ T(SU - US) = [S, T]U+ T[S, U].
The right derivation property is proved in exactly the same way.
A useful consequence of the definition and Proposition 2.1.11 is
D
for
m=O,±I,±2,
....
In particular, [A, 1] = 0 and [A,
A-I]
=
O.
56 2.
OPERATOR
ALGEBRA
2.2 Derivatives of Functions of Operators
a
time-dependent
operator
does
not
commute
with
itself
at
different
times
derivative
of
an
operator
Up to this point we have heen discussing the algebraic properties
of
operators,
static objects that obey certain algebraic rules
and
fulfill the static needs
of
some
applications. However, physical quantities are dynamic, and
if
we
want
operators
to represent physical quantities, we
must
allow them to change
with
time. This
dynamism
is best illustrated in quantum mechanics, where physical observables
are represented by operators.
Let
us consider a mapping H :
ffi.
--->
,c(V),
which/
takes in a real number
and
gives out a linear operatoron the vectorspace V. We denote the image
of
t E
ffi.
by
H(t),
which
acts on the underlying vector space V. The physical meaning
of
this is
that as
t (usually time) varies, its image
H(t)
also varies. Therefore, for different
values
of
t, we have different operators. In particular, [H(t),
H(t')]
""
afor
t
""
t',
A concrete example is an operator that is a linear combination
of
the operators D
and
T introduced in Example 1.3.4, with time-dependent scalars. To be specific,
let
H(t)
= Dcoswt +
Tsinwt,
wherew is a constant. As timepasses, H(t) changes
its identity from D to T
and
back
to D.
Most
of
the time it has a hybrid identity!
Since D
and
Tdo
not
commute,values
of
H(t)
for differeuttimes do
not
necessarily
commute.
Of
particular interest are operators that can be written as exp
H(t),
where
H(t)
is a
"simple"
operator; i.e., the dependence
of
H(t)
on t is simpler than the corre-
sponding dependence
of
exp H(t). We have already encountered such a situation
in Example 2.1.9, where it was shown that the operation
of
rotation around the
z-axis could be written as
expaT,
and
the action
ofT
on (x, y) was a great deal
simplerthan the corresponding action
of
exp
aT.
Such
a state
of
affairs is very
common
in physics. In fact, it
can
be shown
that many operators
of
physical interest can be written as a product
of
simpler
operators, each being
of
the form exp
aT.
For
example, we know from Euler's
theorem
in mechanicsthatan arbitrary rotation in three dimensions can be written
as a product
of
three simpler rotations,
each
being a rotation through a so-called
Euler
angle about an axis.
2.2.1. Definition.
For
the mapping H :
ffi.
--->
,(,(V), we define the derivative as
dH
= lim H(t +
M)
-
H(t).
dt
""-+0
f!,.t
This derivative also belongs to
,c(V).
As long as we keep track
of
the order, practically all the rules
of
differentiation
apply to operators.
For
example,
d dU dT
dt
(UT) =
dt
T +U
dt
.
2Strictlyspeaking,thedomainofH mustbe aninterval [a, b] of therealline.becauseHmay notbe definedfor allR.
However,
for ourpurposes, such a finedistinctionis Dot necessary.
2.2 DERIVATIVES DF
FUNCTIONS
OF
OPERATORS
57
We are not allowed to change the order
of
multiplication on the RHS, not even
when both operators being multiplied are the same on the LHS. For instance, if
we let U = T = Hin the preceding equation, we obtain
d 2
dH dH
-(H)=
-H+H-
dt dt
dt
This is
not,
in general, equal to
2H!fJ/-.
2.2.2.
Example.
Letusfindthe
derivative
ofexp(tH),whereHisindependent
of
t. Using
Definition2.2.1, we have
d lim exp[(t +
Ll.t)Hj
- exp(tH)
-exp(tH)
= .
dt
.6.t-+0
IJ..t
However,forinfinitesimal
I::1t
we have
cxpltr +
Ll.t)H]
-
exp(tH)
= etHel!.tH_ e
tH
= e
tH
(1 +
HLl.t)
_ e
tH
= etHHLl.t.
Therefore,
d etHHLl.t
- exp(tH)= lim
---
=etHH.
dt
l!.HO
Ll.t
Since Hande
tH
commute.e
we also have
d
- exp(tH)= He
tH.
dt
Note
that
in
deriving
the
equation
for the
derivative
of e
tH
,
we haveused the
relation
e
t
He..6..tH
= e(t+Lit)H. This may seem trivial.but it will be shown later that in general,
~#~~.
•
Now let us evaluate the derivative of a more general time-dependent operator,
exp[H(t)]:
d .
exp[H(t
+Ll.t)] -
exp[H(t)]
- exp[H(t)] = Ion .
dt
l!.HO
Ll.t
If
H(t)
possesses a derivative, we have, to the first orderin Ll.t,
d
H(t
+Ll.t) =
H(t)
+Ll.t
dt
H,
and we can write
exp[H(t
+ Ll.t)] = exp[H(t) +
Ll.tdH/dt].
It
is very tempting to
factor out the exp[H(t)] and expand the remaining part. However, as we will see
presently, this is not possible in general. As preparation, consider the following
example, which concerns the integration
of
an operator.
58 2.
OPERATOR
ALGEBRA
evolution
operator
2.2.3.
Example.
The Schrtidingerequation i
;t
It(t»
= H
It(t»
can be turnedinto an
operator differential equation asfollows.Definetheso-called evolutionoperator U(t) by
It(t»
= U(t) It(O»,and substitute in the Schrtidinger eqnation to obtain
i
~U(t)
It(O»
= HU(t)
It(O»
.
at
Ignoringthearbitraryvector [t(O» resultsinadifferentialequationin U(t). Forthepurposes
ofthisexample.Ietusconsideran
operator
differential
equation
of theform dU/ dt =
HU(t),
where His not
dependent
on t, We can finda solutionto such an
equation
by
repeated
differentiation
followedby
Taylor
series
expansion.
Thus,
d
2U
d
~
=
H-
d
U = H[HU(t)] = H
2U(t),
dt
t
d
3U
d d
-3
=
-[H
2U(t)]
= H
2_U
= H
3U(t).
dt dt dt
In general
dnU/dt
n
= HnU(t). Assuming that U(t) is well-defiued at t = 0, the above
relations
say
that
all
derivatives
of
U(t)
are
also well-defined at t =
O.
Therefore,
we can
expand
U(t)
arouud t = 0 to obtain
00
tn
(dnU)
00
tn
U(t)
=
L,
-d
n = L
,HnU(O)
n=On. t t=O n=O
n.
=
(~
U:r)
U(O)= e'HU(O). III
Let
us see
under
what
conditions
we
have
exp(5
+T) =
exp(5)
exp(T). We
consider only the case where the commutator
of
the two operators commutes
with
both
of
them: [T,
[5,
Tj] =0 =
[5, [5,
T]].NowconsidertheoperatorU(t)
=
e'Se'T
e-'(SH)
and
differentiateit
using
the
result
ofExarnple
2.2.2
and
the
product
rule
for
differentiation:
~U
=
5e'se
tT
e-t(SH)
+etSTe'Te-'(S+T) _ e'Se'T(5 +
T)e-t(SH)
dt
= 5e'Se'T
e-t(SH)
_ etSetT5e-t(SH). (2.5)
The
three
factors
of
U(t)
are
present
in all terms; however.
they
are
not
always
nextto one
another.
Wecanswitchthe
operators
if we
introduce
a
commutator.
For
instance, e'T5 = 5e
tT
+letT, 5].
Itis
leflas
aproblemforthereaderto
show
that
if
[5,
Tj
commutes
with5
and
T,
then
letT, 5] =
-t[5,
T]e
tT,
and
therefore, e
tT5
=
5e,r
- t[5, T]e
tT.
Substituting
this in
Equation
(2.5)
and
noting
that
e'55
= SetS yields
dU/dt
= t[5. TjU(t).
The
solution
to this
equation
is
U(t) =
exp
c;
[5,
T])
=>
e'Se'Te-t(SH)
=
exp
c;
[5,
T])
3Thisis a consequence of amore
general
result
that
if two
operators
commute,
anypairof
functions
of those
operators
also
commute
(see
Problem
2.14).
Baker-Campbell-
Hausdorff
formula
2.2
DERIVATIVES
OF
FUNCTIONS
OF
OPERATORS
59
because
U(O)
= 1. We thus have the following:
2.2.4.
Proposition.
Let
S, T E £'(V).
If
[S, [S, T]] = 0 = [T, [S,
TJ],
then the
Baker-Campbell-Hausdorff
formula
holds:
(2.6)
In
particular, e'Se
'T
= e,(s+n
ifand
only
if[S,
TJ
=o.
If
t = I, Equation (2.6) reduces to
e
SeTe-(l/2)[S,T]
= eS+T.
(2.7)
Now assume that both
H(t) and its derivative commute with [H,
dH/dt].
Letting
S
=H(t) and T =f!J.tdH/dt in (2.7), we obtain
eH(t+.6.t) = e
H(t)+.6.tdH/dt
=
eH(I)
elll(dH/dl)e-[H(I),lltdH/dl]/2.
For infinitesimal
f!J.t,
this yields
e
H(I+IlI)
=eH(I)
(1
+f!J.t~~)
(1-
~f!J.t[H(t),
~~])
=e
H(I){l
+f!J.t~~
-
~f!J.t[H(t),
~~]},
and we have
~eH(I)
= e
HdH
_
!eH
[H
dH].
dt dt
2 '
dt
We
can
also write
eH(t+IlI) =e[H(I)+lltdH/dl] =e[llldH/dl+H(I)]
= e[llldH/dl]eH(t)e-[lltdH/dl,H(ll]/2,
which yields
~eH(ll
= dH eH+
!eH
[H
dH].
dt
dt
2 '
dt
Addingthe above two expressionsand dividingby 2yields the following symmetric
expression forthe
derivative:
~eH(ll
=!
(dH
eH
+eHdH)
=!
{dH
eH}
dt
2
dt dt
2
dt
' ,
antlcommutator
where IS, T} sa ST + TS is called the
anticommutator
of
the operators S and T.
We, therefore, have the following proposition.
60 2.
OPERATOR
ALGEBRA
2.2.5.Prepositlon,
Let
H : R -->
.G
(V) and
assume
that H and its derivative
commutewith [H,
dH/dt].
Then
!£eH(t)
=!
{dH
e
H}
dt
2
dt
' .
In particular,
if[H,
dH/dt]
= 0, then
!£eH(t) = dHe
H
=e
H
dH.
dt dt
dt
A frequently eucountered operator is F(t) = etABe-
tA,
where A and B are
t-independent.
It
is straightforward to show that
dF
- = [A,
F(t)]
dt
and
d [
dF]
-[A,
F(t)]
= A, - .
dt
dt
Using these results, we can write
d
2F
d
-2
=
-[A,
F(t)]
=[A, [A,
F(t)]]
sa A
2[F(t)],
dt dt
and in general,
dnF/dt
n
= An[F(t)], where
An[F(t)]
is defined inductively as
An[F(t)] = [A,A
n-
1
[F(t)]],
with AO[F(t)]
'"
F(t). For example,
A
3[F(t)]
=[A,A
2[F(t)]]
=[A, [A,A[F(t)]]] =[A, [A, [A,
F(t)]]].
Evaluating F(t) and all its derivatives at t = 0 and substituting in the Taylor
expansion about
t = 0, we get
00
tn
dRFI
00
tn
00
t"
F(t) =L ,
-.-
=L
,An
[F(O)]=L
,An[B].
n=O n. dt 1=0 n=O n. n=O n.
That
is,
00
tn t2
etABe-
tA
= L
_An[B]
ea B +t[A, B] +
-[A,
[A,B]] +....
n~O
n! 2!
Sometimes tltis is written symbolically as
where the RHS is merely an abbreviation of the infinite sum in the middle.
For
t = I we obtain a widely used formula:
(
00
I ) I
eABe-
A
=
eA[B]
= L
,An
[B]
'"
B+[A, B]+
,[A,
[A, B]] +....
n=O n. 2.