Hassani S. Mathematical Methods: For Students of Physics and Related Fields
Подождите немного. Документ загружается.


194 Planar and Spatial Vectors
6.2.1 Transformation of Vectors
In the case of the plane, the machinery of matrices connected the components
of a vector in different bases. In the same context, we contrasted active
versus passive transformation. From now on, we want to concentrate on active
transformations, i.e., we consider transformations that alter the vectors rather
transformation of
vectors in space
lead to 3 ×3
matrices.
that the axes.
Consider a vector a with components(α
1
,α
2
,α
3
) in the basis B ≡{a
1
, a
2
,
a
3
}. If we transform this vector, it will acquire new components, (α
1
,α
2
,α
3
),
in the same basis B. We can therefore write
a = α
1
a
1
+ α
2
a
2
+ α
3
a
3
and a
= α
1
a
1
+ α
2
a
2
+ α
3
a
3
, (6.26)
where a
is the transform of a. Now suppose that we transform both a and
the basis vectors in exactly the same manner. Then the components of the
transformed a will be the same in the new basis as the original a was in the
old basis:
a
= α
1
a
1
+ α
2
a
2
+ α
3
a
3
. (6.27)
Since B is a basis, any vector, in particular, the transformed basis vectors
can be written in terms of them:
a
1
= a
11
a
1
+ a
21
a
2
+ a
31
a
3
,
a
2
= a
12
a
1
+ a
22
a
2
+ a
32
a
3
, (6.28)
a
3
= a
13
a
1
+ a
23
a
2
+ a
33
a
3
.
Now substitute Equation (6.28) in the RHS of (6.27), and the second equation
of (6.26) in the LHS of (6.27) and rearrange terms to obtain
(α
1
− a
11
α
1
− a
12
α
2
− a
13
α
3
)a
1
+(α
2
− a
21
α
1
− a
22
α
2
− a
23
α
3
)a
2
+(α
3
− a
31
α
1
− a
32
α
2
− a
33
α
3
)a
3
=0.
The linear independence of a
1
, a
2
,anda
3
gives
α
1
= a
11
α
1
+ a
12
α
2
+ a
13
α
3
,
α
2
= a
21
α
1
+ a
22
α
2
+ a
23
α
3
, (6.29)
α
3
= a
31
α
1
+ a
32
α
2
+ a
33
α
3
,
which, with the introduction of 3 × 1(column),and3× 3 matrices, can be
written concisely as
⎛
⎝
α
1
α
2
α
3
⎞
⎠
=
⎛
⎝
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
⎞
⎠
⎛
⎝
α
1
α
2
α
3
⎞
⎠
or a
= Aa. (6.30)
To know how a general vector transforms, we only need the transformation
matrix, namely the 3 × 3 matrix in Equation (6.30). This, in turn, is ob-
tained completely from the transformation of basis vectors as given in Equa-
tion (6.28). The reader should note, however, that the coefficients in each line
of (6.28) appear as a column in the transformation matrix. Thus,

6.2 Vectors in Space 195
Box 6.2.2. To find the transformation matrix, apply the transforma-
tion to the basis vectors, and write the transformed basis vectors in terms
of the old basis vectors. The “horizontal” coefficients become the columns
of the transformation matrix.
Let us apply a transformation to a
and to {a
1
, a
2
, a
3
}. We could denote
the new vectors by a second prime; but, then it would give the impression
that it is the same transformation as the earlier one. This is not the case.
Therefore, we use a new symbol “˘” to emphasize that the second transfor-
mations is of a completely different nature, and denote the new transformed
vectors by
˘
a
and {
˘
a
1
,
˘
a
2
,
˘
a
3
}. In the basis {a
1
, a
2
, a
3
},
˘
a
can be written as
˘
a
= α
1
a
1
+ α
2
a
2
+ α
3
a
3
, (6.31)
while the application of the new transformation to the second equation of
(6.26) gives
˘
a
= α
1
˘
a
1
+ α
2
˘
a
2
+ α
3
˘
a
3
.
The vectors on the RHS can be written as a linear combination of {a
1
, a
2
, a
3
}:
˘
a
1
= a
11
a
1
+ a
21
a
2
+ a
31
a
3
,
˘
a
2
= a
12
a
1
+ a
22
a
2
+ a
32
a
3
, (6.32)
˘
a
3
= a
13
a
1
+ a
23
a
2
+ a
33
a
3
.
Using the by-now-familiar procedure, we can relate the coefficients as follows:
⎛
⎝
α
1
α
2
α
3
⎞
⎠
=
⎛
⎝
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
⎞
⎠
⎛
⎝
α
1
α
2
α
3
⎞
⎠
or a
= A
a
. (6.33)
We can also find how a
and a are related in two ways. The first way
applies “˘” to both sides of Equations (6.27) and (6.28), substitutes (6.32)
in the transformed (6.28), and the result of this substitution in (6.27). This
will give
˘
a
as a linear combination of a
1
, a
2
,anda
3
. Equating this with
Equation (6.31) will give us a matrix relation between the a
and a. Second,
we can substitute the matrix relation of Equation (6.30) in that of (6.33)
and obtain a relation between the a
and a via the product of two matrices.
Comparison of these two relations will give us the rules of multiplication for
3 ×3 matrices which, except for the number of elements involved, is identical
to the multiplication rule for the 2 ×2 matrices. Similarly, the multiplication
by a row or a column vector, etc., is exactly as before.
There is a new kind of matrix associated with the space that we could not
consider in our discussion of the plane. Let B = {a
1
, a
2
, a
3
} be a basis for
the space, and take any two of the vectors in B,saya
1
and a
2
.Thesetwo

196 Planar and Spatial Vectors
vectors form a plane any vector of which has only two components: If a is in
this plane, it can be written as
a = α
1
a
1
+ α
2
a
2
.
Now suppose we apply the same transformation to both a and {a
1
, a
2
}. Then,
on the one hand, a
= α
1
a
1
+α
2
a
2
, and on the other hand, a
= α
1
a
1
+α
2
a
2
+
α
3
a
3
, because the transformed a, in general, comes out of the plane of a
1
and
a
2
. Therefore,
α
1
a
1
+ α
2
a
2
= α
1
a
1
+ α
2
a
2
+ α
3
a
3
. (6.34)
But we also have
a
1
= a
11
a
1
+ a
21
a
2
+ a
31
a
3
,
a
2
= a
12
a
1
+ a
22
a
2
+ a
32
a
3
.
Substituting these in Equation (6.34) yields
(α
1
−a
11
α
1
−a
12
α
2
)a
1
+(α
2
−a
21
α
1
−a
22
α
2
)a
2
+(α
3
−a
31
α
1
−a
32
α
2
)a
3
=0.
Linear independence of the vectors in B now gives
α
1
= a
11
α
1
+ a
12
α
2
,
α
2
= a
21
α
1
+ a
22
α
2
, (6.35)
α
3
= a
31
α
1
+ a
32
α
2
,
which can be written in matrix form as
⎛
⎝
α
1
α
2
α
3
⎞
⎠
=
⎛
⎝
a
11
a
12
a
21
a
22
a
31
a
32
⎞
⎠
α
1
α
2
or a
= Aa. (6.36)
The matrix A is now a 3 ×2 matrix. It relates two-component column vectors
to three-component column vectors.
Example 6.2.1.
Another way to illustrate the preceding discussion is to use first
degree polynomials. Let us multiply all polynomials of P
1
[t] by a fixed first degree
polynomial, say 1 + t. This will transform vectors of P
1
[t]intovectorsofP
2
[t].
In particular, it will transform the basis {1,t} into vectors in P
2
[t]whichcanbe
expressed as a linear combination of the basis vectors {1,t,t
2
} of P
2
[t]. Let f
1
=1,
f
2
= t,andf
3
= t
2
, and note that
f
1
=1·(1 + t)=1+t =1· f
1
+1· f
2
+0· f
3
,
f
2
= t(1 + t)=t + t
2
=0· f
1
+1· f
2
+1· f
3
.
According to Box 6.2.2, the transformation matrix is
⎛
⎝
10
11
01
⎞
⎠
6.2 Vectors in Space 197
from which we can find the transform of a general vector f = α
0
+ α
1
t in P
1
[t]. If
the transformed vector is written as f
= α
0
+ α
1
t + α
2
t
2
,then
⎛
⎝
α
0
α
1
α
2
⎞
⎠
=
⎛
⎝
10
11
01
⎞
⎠
α
0
α
1
.
This can be verified directly by multiplying f = α
0
+ α
1
t by 1 + t.
In the discussion above, we started with the plane (with two dimensions)
and transformed to space (with three dimensions). Example 6.2.1 illustrated
this transformation for P
1
[t]andP
2
[t]. We can also start with three dimen-
sions and end up in two dimensions. The result will be a matrix relation of
the form
α
1
α
2
=
b
11
b
12
b
13
b
21
b
22
b
23
⎛
⎝
α
1
α
2
α
3
⎞
⎠
or a = Ba
(6.37)
with B a2× 3 matrix. The following example illustrates this point.
Example 6.2.2.
Let us start with P
2
[t] and as transformation, consider differen-
tiation whichactsonthebasis{1,t,t
2
}. It is clear that the resulting vectors will differentiation is a
(linear)
transformation.
belong to P
1
[t], because they will be linear combinations of 1 and t.Withf
1
=1,
f
2
= t,andf
3
= t
2
, and using a prime to denote the transformed vector, we can
write
f
1
=
d
dt
(1) = 0 = 0 ·f
1
+0·f
2
,
f
2
=
d
dt
(t)=1=1·f
1
+0· f
2
,
f
3
=
d
dt
(t
2
)=2t =0· f
1
+2· f
2
,
giving rise to the transformation matrix
010
002
.
The reader may verify that the coefficients (α
0
,α
1
)inP
1
[t] of the derivative of an
arbitrary polynomial f(t)=α
0
+ α
1
t + α
2
t
2
are given by
α
0
α
1
=
010
002
⎛
⎝
α
0
α
1
α
2
⎞
⎠
which can also be obtained directly by differentiating f(t).
The point of this discussion is that if you have a collection of vectors with
various numbers of components, then it is possible to construct matrices that
relate the two sets of vectors. These matrices have different numbers of rows
and columns. The mathematics of these new matrices, their notion of equality,
their addition, subtraction, multiplication, transposition, etc., is exactly the
same as before

198 Planar and Spatial Vectors
Example 6.2.3. Suppose
A =
⎛
⎝
1 −1
−12
01
⎞
⎠
and B =
−10 1
12−2
.
Then A + B is not defined, but
A
t
+ B =
1 −10
−121
+
−10 1
12−2
=
0 −11
04−1
and
A + B
t
=
⎛
⎝
1 −1
−12
01
⎞
⎠
+
⎛
⎝
−11
02
1 −2
⎞
⎠
=
⎛
⎝
00
−14
1 −1
⎞
⎠
=(A
t
+ B)
t
.
As for multiplication, we have
AB =
⎛
⎝
1 −1
−12
01
⎞
⎠
−10 1
12−2
=
⎛
⎝
−2 −23
34−5
12−2
⎞
⎠
and
BA =
−10 1
12−2
⎛
⎝
1 −1
−12
01
⎞
⎠
=
−12
−11
,
where the element in the ith row and jth column of the product is obtained by
multiplying the ith row of the left factor by the jthrowoftherightfactorterm-by-
term and adding the products (see Box 6.1.3).
The 3 ×3matrix
1 ≡
⎛
⎝
100
010
001
⎞
⎠
is the 3×3 identity matrix (or unit matrix), and has the property that when it
multiplies any other 3×3 matrix on either side, the latter does not get affected.
Similarly, when this identity matrix multiplies a three-column vector on the
left or a three-row vector on the right, it does not affect them. As in the case
of the plane, the unit matrix is used to define the inverse of a matrix A as a
matrix B that multiplies A on either side and gives the unit matrix.
6.2.2 Inner Product
As in the case of two dimensions, the usual rule of the dot product of space
vectors in terms of their components along
ˆ
e
x
,
ˆ
e
y
,and
ˆ
e
z
does not apply in
the general case. For that, we need an inner product matrix G.Asinthe
plane, this is a matrix whose elements are dot products of the basis vectors.
If B = {a
1
, a
2
, a
3
} is a basis for space, then G is a 3 × 3 symmetric matrix
G =
⎛
⎝
g
11
g
12
g
13
g
21
g
22
g
23
g
31
g
32
g
33
⎞
⎠
,g
ij
= g
ji
= a
i
·a
j
,i,j=1, 2, 3. (6.38)
6.2 Vectors in Space 199
Example 6.2.4. Let us find the inner product matrix for the basis {1,t,t
2
} of
P
2
[t] when the inner product integration is from 0 to 1. Because of the symmetry of
the matrix and the fact that we have already calculated the 2×2 submatrix of G,we
need to find g
13
, g
23
,andg
33
.Letf
1
= f
1
(t)=1,f
2
= f
2
(t)=t,andf
3
= f
3
(t)=t
2
;
then
g
13
= f
1
· f
3
=
#
1
0
f
1
(t)f
3
(t) dt =
#
1
0
t
2
dt =
1
3
,
g
23
= f
2
· f
3
=
#
1
0
f
2
(t)f
3
(t) dt =
#
1
0
t
3
dt =
1
4
,
g
33
= f
3
· f
3
=
#
1
0
f
3
(t)f
3
(t) dt =
#
1
0
t
4
dt =
1
5
.
It follows that
G =
⎛
⎜
⎝
1
1
2
1
3
1
2
1
3
1
4
1
3
1
4
1
5
⎞
⎟
⎠
.
This matrix can be used to find the dot product of any two vectors in terms of their
components in the basis {1,t,t
2
} of P
2
[t].
If a and b have components (α
1
,α
2
,α
3
)and(β
1
,β
2
,β
3
)inB, then their
inner product is given by
8
aGb =
α
1
α
2
α
3
!
⎛
⎝
g
11
g
12
g
13
g
21
g
22
g
23
g
31
g
32
g
33
⎞
⎠
⎛
⎝
β
1
β
2
β
3
⎞
⎠
. (6.39)
If this expression is zero, we say that a and b are G-orthogonal. For an or-
G-orthogonal
vectors in space
thonormal basis, the inner product matrix G becomes the unit matrix
6
and
we recover the usual inner product of space vectors in terms of components.
As discussed in the case of the plane, every point in space can be thought
of as the tip of a vector whose tail is the origin. Then, we can express the
(G-dependent) distance between two points in terms of vectors. Let r
1
be
the vector to point P
1
and r
2
the vector to point P
2
. Then the length of the
displacement vector is the “distance” between P
1
and P
2
:
Δr · Δr =(r
1
− r
2
) ·(r
1
− r
2
)=(
9
Δr)G(Δr). (6.40)
Recall that only in the positive definite case is
P
1
P
2
2
nonnegative.
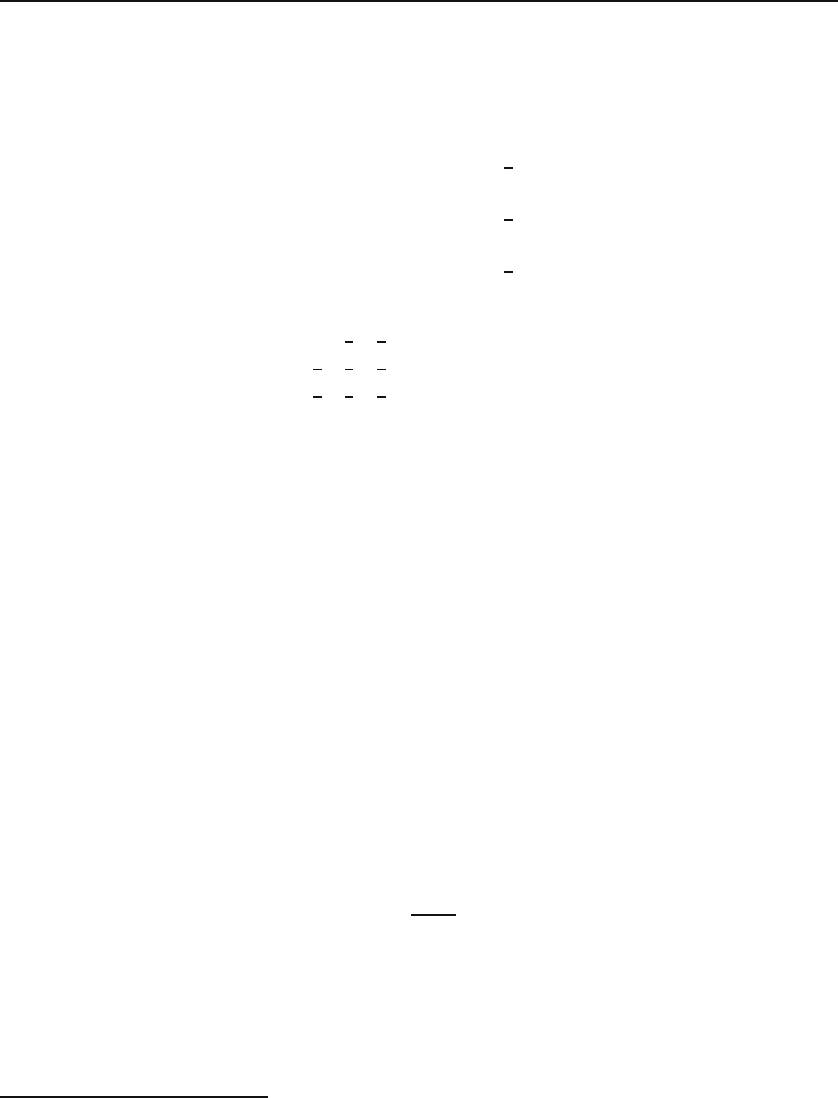
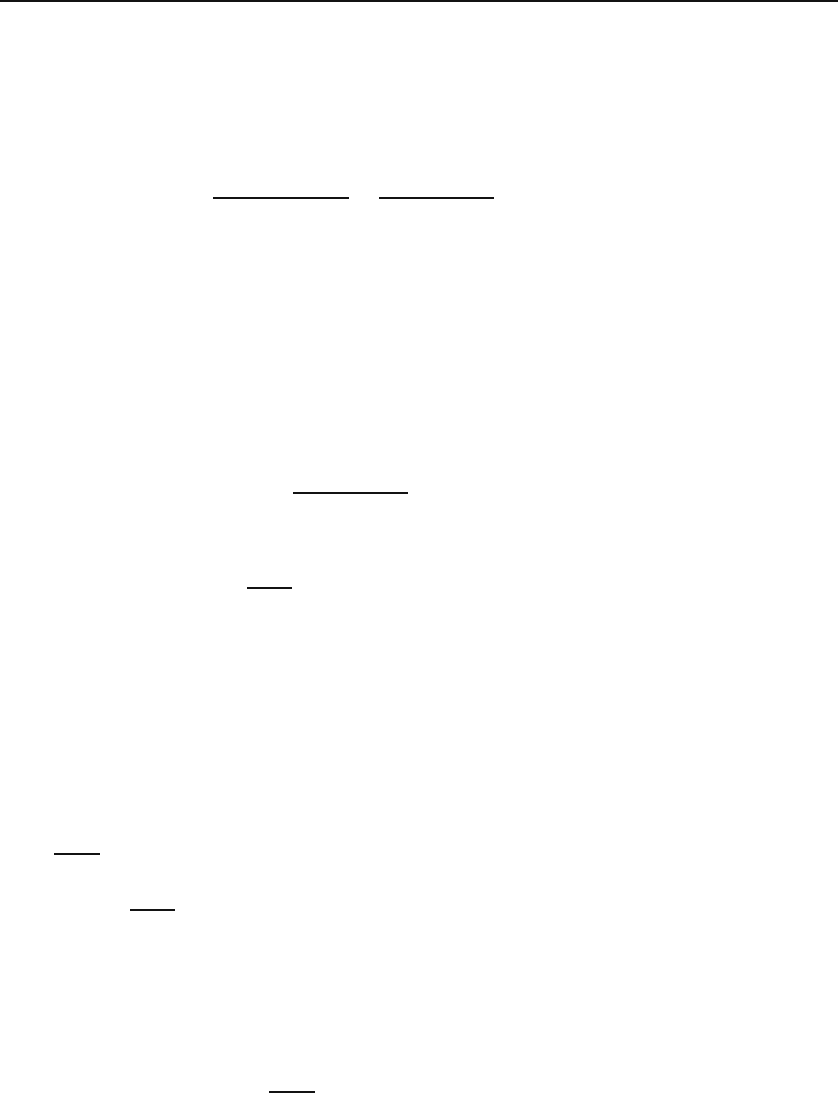
As in the case of the plane, it is convenient to construct orthonormal basis
vectors in space. This can be done by the Gram–Schmidt process. Suppose
Gram–Schmidt
process for vectors
in space
B = {a
1
, a
2
, a
3
} is a basis for space as shown in Figure 6.6. Again, to avoid
complications, we assume that the inner product is positive definite, so that
the inner product of every nonzero vector with itself is positive. We know
how to construct two orthonormal vectors out of {a
1
, a
2
}; we did that in
6
Only if the inner product is positive definite.
200 Planar and Spatial Vectors
(a)
(c)
(b)
a
3
e
2
^
e
1
^
e
2
^
e
1
^
a
3
′
e
3
^
e
2
^
e
1
^
a
3
′
Figure 6.6: The Gram–Schmidt process for three linearly independent vectors in space.
our discussion of the plane. Call these new orthonormal vectors {
ˆ
e
1
,
ˆ
e
2
} and
construct the vector a
3
,
a
3
= a
3
− (a
3
·
ˆ
e
1
)
ˆ
e
1
− (a
3
·
ˆ
e
2
)
ˆ
e
2
which is obtained from a
3
by taking away its projections along
ˆ
e
1
and
ˆ
e
2
.
Now note that
ˆ
e
1
· a
3
=
ˆ
e
1
·a
3
− (a
3
·
ˆ
e
1
)
ˆ
e
1
·
ˆ
e
1
=1
−(a
3
·
ˆ
e
2
)
ˆ
e
2
·
ˆ
e
1
=0
=0,
ˆ
e
2
· a
3
=
ˆ
e
2
·a
3
− (a
3
·
ˆ
e
1
)
ˆ
e
2
·
ˆ
e
1
=0
−(a
3
·
ˆ
e
2
)
ˆ
e
2
·
ˆ
e
2
=1
=0,
i.e., a
3
is orthogonal to both
ˆ
e
1
and
ˆ
e
2
. This suggests defining
ˆ
e
3
as
ˆ
e
3
≡
a
3
|a
3
|
=
a
3
a
3
·a
3
.
The reader should note that in the construction of {
ˆ
e
1
,
ˆ
e
2
,
ˆ
e
3
},wehavesimply
taken the linear combination of a
1
, a
2
,anda
3
.
Transformations that leave the inner products unchanged can be obtained
in exactly the same way as for the plane. For A to preserve the inner product,
we need to have
G-orthogonal
matrices
8
AGA = G, (6.41)
i.e., it has to be G-orthogonal. If G is the identity matrix, then A can be
thought of as a rigid rotation and is simply called orthogonal;itsatisfies
8
AA = 1. (6.42)
If we write A as
⎛
⎝
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
⎞
⎠
,

6.2 Vectors in Space 201
then Equation (6.42) can be written as
⎛
⎝
a
11
a
21
a
31
a
12
a
22
a
32
a
13
a
23
a
33
⎞
⎠
⎛
⎝
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
⎞
⎠
=
⎛
⎝
100
010
001
⎞
⎠
. (6.43)
It is clear from Equation (6.43) that the columns of the matrix A,considered
as vectors, have unit length and are orthogonal to other columns in the usual
positive definite inner product.
7
This is why A is called orthogonal.
The product on the LHS of Equation (6.43) is a 3× 3 matrix whose elements
must equal the corresponding elements of the unit matrix on the RHS. For
example,
a
2
11
+ a
2
21
+ a
2
31
=1. (6.44)
Similarly, the equality of the elements located in the first row and second
column on both sides gives
a
11
a
12
+ a
21
a
22
+ a
31
a
32
=0
and so on. Thus we obtain nine equations. However, simple inspection of these
equations reveals that only six of them are independent. Therefore, we can
orthogonal
matrices in space
are determined by
three parameters
such as the Euler
angles.
only solve for the nine unknowns in terms of three of them (see Section 7.6).
It does not matter which three matrix elements we choose. If we choose a
11
,
a
21
,anda
31
, for example, then Equation (6.44) reveals that these parameters
can be sines and cosines. What this means physically is that Three parameters
are required to specify a rigid rotation of the axes.
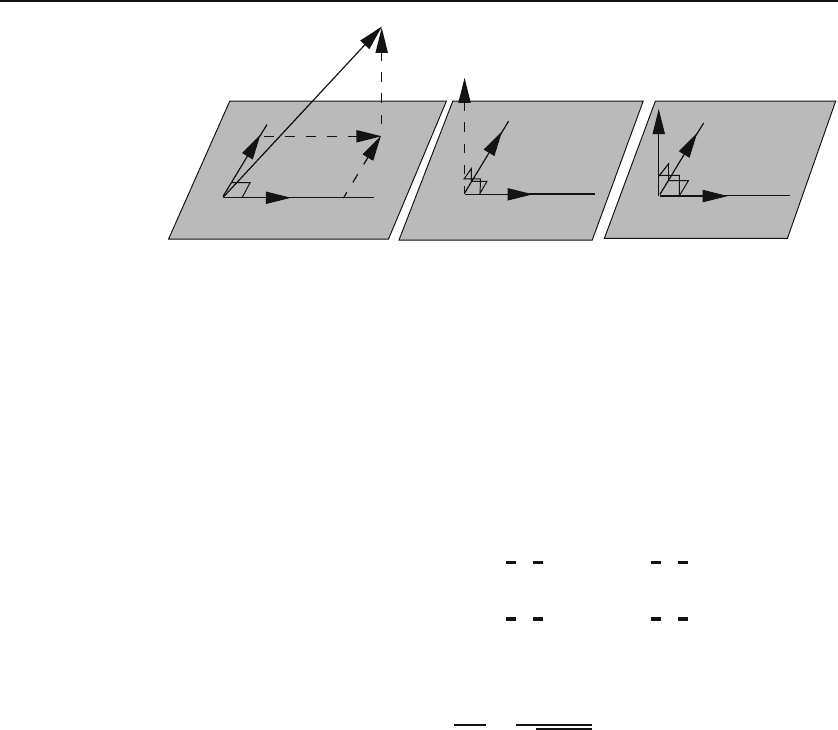
There are many ways to specify these three parameters. One of the
most useful and convenient ways is by using Euler angles ψ, ϕ,andθ (see
Euler angles
Figure 6.7). Example 6.2.5 below shows that in terms of these angles, the
matrix A can be written as
A =
⎛
⎝
cos ψ cos ϕ−sin ψ cos θ sin ϕ −cos ψ sin ϕ−sin ψ cos θ cos ϕ sin ψ sin θ
sin ψ cos ϕ+cos ψ cos θ sin ϕ −sin ψ sin ϕ+cos ψ cos θ cos ϕ −cos ψ sin θ
sin θ sin ϕ sin θ cos ϕ cos θ
⎞
⎠
.
It is straightforward to verify that A
t
A = 1. Euler angles are useful in de-
scribing the rotational motion of a rigid body in mechanics.
Example 6.2.5.
From Figure 6.7 it should be clear that the primed basis is ob- a general
orthogonal matrix
in space can be
written as the
product of three
successive
rotations.
tained from the basis {
ˆ
e
1
,
ˆ
e
2
,
ˆ
e
3
} by the following three operations.
(a) Rotate the coordinate system about the
ˆ
e
3
-axis through angle ϕ. This corre-
sponds to a rotation in the
ˆ
e
1
ˆ
e
2
-plane, leaving the
ˆ
e
3
-axis unchanged. We saw in
the previous section how the 2 × 2 part of the matrix looked like. The complete
3 × 3 matrix corresponding to such a rotation is
A
1
=
⎛
⎝
cos ϕ −sin ϕ 0
sin ϕ cos ϕ 0
001
⎞
⎠
. (6.45)
7
This holds for 2 × 2 orthogonal matrices as well.
202 Planar and Spatial Vectors
ˆ
e
1
ˆ
e
2
ˆ
e
3
ˆ
′
e
3
ˆ
′
e
2
ˆ
′
e
1
ϕ
ψ
θ
ξ
Figure 6.7: The Euler angles and the rotations about three axes making up a general
rotation in space.
It is clear that this matrix leaves the third (z) component of a column vector un-
changed while rotating the first two (x and y)componentsbyϕ.
(b) Rotate the new coordinate system around the new
ˆ
e
1
-axis (the ξ-axis in the
figure) through an angle θ. The corresponding matrix is
A
2
=
⎛
⎝
10 0
0cosθ −sin θ
0sinθ cos θ
⎞
⎠
. (6.46)
(c) Rotate the system about the new
ˆ
e
3
-axis (the
ˆ
e
3
-axis in the figure) through an
angle ψ. The corresponding matrix is
A
3
=
⎛
⎝
cos ψ −sin ψ 0
sin ψ cos ψ 0
001
⎞
⎠
. (6.47)
It is easily verified that A = A
3
A
2
A
1
, i.e., the rotation A has the same effect as that
of A
1
, A
2
,andA
3
performed in succession.
6.3 Determinant
Matrices have found application in many diverse fields of pure and appliedfrom matrices to
systems of linear
equations to
determinants
mathematics. One such application is in the solution of linear equations. Con-
sider the first set of equations in which we introduced matrices,
Equations (6.4) and (6.5). The first of these equations associates a pair of
numbers (α
1
,α
2
) to a given pair (α
1
,α
2
), i.e., if we know the latter pair,
Equation (6.4) gives the former. What if we treat (α
1
,α
2
) as unknown? Un-
der what conditions can we find these unknowns in terms of the known pair
(α
1
,α
2
)? Let us use a more suggestive notation and write Equation (6.4) as
a
11
x + a
12
y = b
1
,
a
21
x + a
22
y = b
2
. (6.48)
6.3 Determinant 203
We want to investigate conditions under which a pair (x, y) exists which sat-
isfies Equation (6.48). Let us assume that none of the a
ij
’s is zero. The case
in which one of them is zero is included in the final conclusion we are about
to draw. Multiply the first equation of (6.48) by a
22
and the second by a
12
and subtract the resulting two equations. This yields (a
11
a
22
− a
12
a
21
)x =
a
22
b
1
− a
12
b
2
, which has a solution for x of the form
x =
a
22
b
1
− a
12
b
2
a
11
a
22
− a
12
a
21
≡
a
22
b
1
− a
12
b
2
det A
(6.49)
if a
11
a
22
−a
12
a
21
= 0. In the last equality we have defined the determinant determinant of a
2 × 2 matrix
of A:
A =
a
11
a
12
a
21
a
22
⇒ det A ≡ a
11
a
22
− a
12
a
21
. (6.50)
We can also find y. Multiply the first equation of (6.48) by a
21
and the second
by a
11
and subtract the resulting two equations. This yields
(a
11
a
22
− a
12
a
21
)y = a
11
b
2
− a
21
b
1
which has a solution for y of the form
y =
a
11
b
2
− a
21
b
1
det A
. (6.51)
We can combine Equations (6.49) and (6.51) into a single matrix equation:
x
y
=
1
det A
a
22
−a
12
−a
21
a
11
b
1
b
2
. (6.52)
This is the inverse of the matrix form of Equation (6.48). Indeed if we had
written that equation in the form Ax = b,andif A had an inverse,sayB,
then we could have multiplied both sides of the equation by B and obtained
BA
=1
x = Bb ⇒ x = Bb.
This is precisely what we have in Equation (6.52)! Is the matrix multiplying
the column vector b the inverse of A? Let us find out
1
det A
a
22
−a
12
−a
21
a
11
a
11
a
12
a
21
a
22
=
1
det A
a
22
a
11
− a
12
a
21
0
0 −a
21
a
12
+ a
11
a
22
=
10
01
.
So, it is indeed the inverse of A. We denote this inverse by A
−1
.
Theorem 6.3.1. AmatrixA =
a
11
a
12
a
21
a
22
has an inverse if and only if
its determinant, defined by det A ≡ a
11
a
22
−a
12
a
21
, is not zero, in which case
A
−1
=
1
det A
a
22
−a
12
−a
21
a
11
.