Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
INPUT-OUTPUT STABILITY AND DISSIPATIVITY 475
where x(t), u(t), and y(t) ∈ R. Now, it f ollows that
y(t) = x(t) =
Z
t
0
e
t−τ
u(τ)dτ,
which implies that for all u(·) ∈ L
2e
, y(·) ∈ L
2e
. Next, let u(t) = e
−t
so that
u(·) ∈ L
2
. In this case,
y(t) =
Z
t
0
e
t−τ
e
−τ
dτ = sinh t,
which implies that y(·) 6∈ L
2
. Hence, G given by (7.11) and (7.12) is n ot
L
2
-stable. Note that the zero solution to (7.11) is unstable. △
Example 7.2. In this example, let G
i
: L
∞e
→ L
∞e
, i = 1, 2, 3, be
given by
G
1
[u](t) = u
2
(t),
G
2
[u](t) = u(t) + 1,
G
3
[u](t) = log
e
(1 + u
2
(t)).
It is clear that G
1
is L
∞
-stable. However, note that there does not exist
constants γ and β (with p = ∞) such that (7.7) holds which implies that
G
1
is not L
∞
-stable with finite gain. Next, since |||G
2
[u]|||
∞
≤ |||u|||
∞
+ 1 it
follows that G
2
is L
∞
-stable with finite gain but not L
∞
-stable with finite
gain and zero bias. Finally, since |||G
3
[u]|||
∞
≤
√
2|||u|||
∞
it follows that G
3
is
L
∞
-stable with fin ite gain and zero bias. △
Example 7.3. Consider the scalar operator dynamical system G given
by the mapping
y(t) = G[u](t) =
Z
t
0
e
α(t−τ)
u(τ)dτ, t ≥ 0,
where α ∈ R. Let u(·) ∈ L
∞e
, let T > 0, and note that f or all t ≤ T ,
|y(t)| ≤
Z
t
0
e
α(t−τ)
|u(τ)|dτ
≤ |||u
T
|||
∞
Z
t
0
e
α(t−τ)
dτ
=
e
αt
−1
α
|||u
T
|||
∞
≤
e
|α|T
− 1
|α|
|||u
T
|||
∞
,
which implies that |||y
T
|||
∞
≤
e
|α|T
−1
|α|
|||u
T
|||
∞
, establishing that G : L
∞e
→
L
∞e
.

NonlinearBook10pt November 20, 2007
476 CHAPTER 7
Now, let α < 0 and let u(·) ∈ L
∞
. In this case, it follows that for all
t > 0,
|y(t)| ≤ |||u|||
∞
Z
t
0
e
α(t−τ)
dτ
=
e
αt
− 1
α
|||u|||
∞
≤
1
|α|
|||u|||
∞
,
which implies that G is L
∞
-stable with finite gain and zero bias for all α < 0.
Finally, let α > 0 and let u(t) ≡ 1 so that u(·) ∈ L
∞
. In this case,
y(t) =
e
αt
−1
α
, which implies that y(·) 6∈ L
∞
. Hence, G is not L
∞
-stable f or
all α > 0. △
7.3 The Small Gain Theorem
In this section, we consider feedback interconnections of input-output
stable systems and provide sufficient conditions for inpu t-output stability of
interconnected systems. Specifically, let G
1
: L
m
pe
→ L
l
pe
and G
2
: L
l
pe
→ L
m
pe
,
and consider the negative feedback interconnection given in Figure 7.1 where
(u
1
, u
2
) ∈ L
m
pe
× L
l
pe
and (y
1
, y
2
) ∈ L
l
pe
× L
m
pe
are the in put and the output
signals of the closed-loop system, respectively, and e
1
△
= u
1
− y
2
∈ L
m
pe
and
e
2
△
= u
2
+ y
1
∈ L
l
pe
are the inp uts to G
1
and G
2
, respectively. Note that
y
1
= G
1
[e
1
] = G
1
[u
1
− y
2
] and y
2
= G
2
[e
2
] = G
2
[u
2
+ y
1
]. Hence,
y
1
y
2
=
G
1
[u
1
− y
2
]
G
2
[u
2
+ y
1
]
(7.13)
and
u
1
u
2
=
e
1
+ G
2
[e
2
]
e
2
− G
1
[e
1
]
. (7.14)
In general, there may not exist a mapping
˜
G : L
m
pe
× L
l
pe
→ L
l
pe
× L
m
pe
such that y =
˜
G[u], where y
△
= [y
T
1
, y
T
2
]
T
and u
△
= [u
T
1
, u
T
2
]
T
, and (7.13) holds.
In this chapter, we restrict G
1
and G
2
such that there exists a mapping
˜
G : L
m
pe
×L
l
pe
→ L
l
pe
×L
m
pe
such that y =
˜
G[u] and (7.13) holds. In this case,
the feedb ack interconnection given in Figure 7.1 is well defined. Note that
such a
˜
G exists if and only if there exists a mapping
ˆ
G : L
m
pe
×L
l
pe
→ L
l
pe
×L
m
pe
such that e =
ˆ
G[u], where e
△
= [e
T
1
, e
T
2
]
T
, and (7.14) holds.
Definition 7.4. Let the feedback interconnection of G
1
and G
2
given
in Figure 7.1 be well defined and let
˜
G : L
m
pe
×L
l
pe
→ L
l
pe
×L
m
pe
be such that

NonlinearBook10pt November 20, 2007
INPUT-OUTPUT STABILITY AND DISSIPATIVITY 477
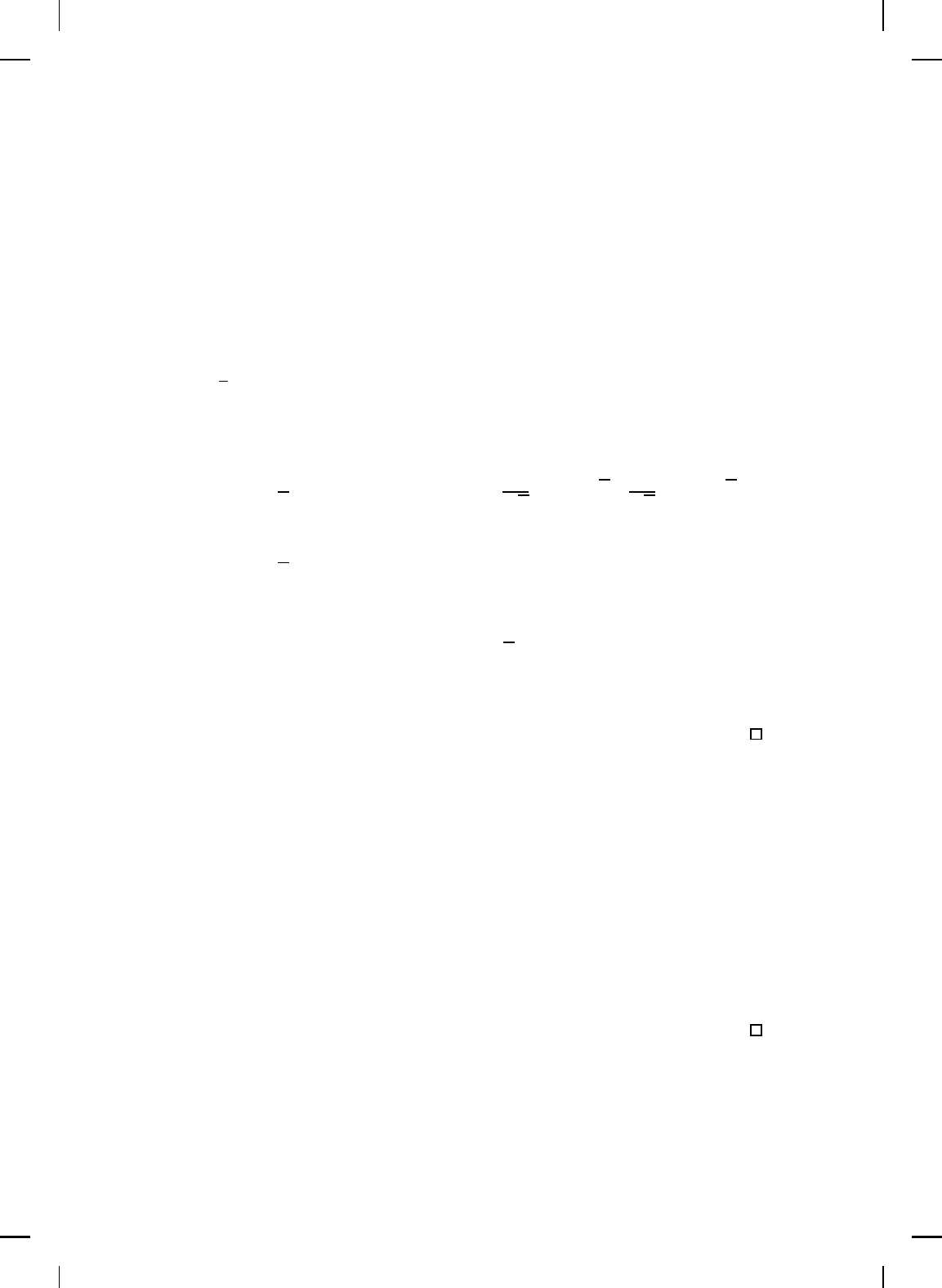
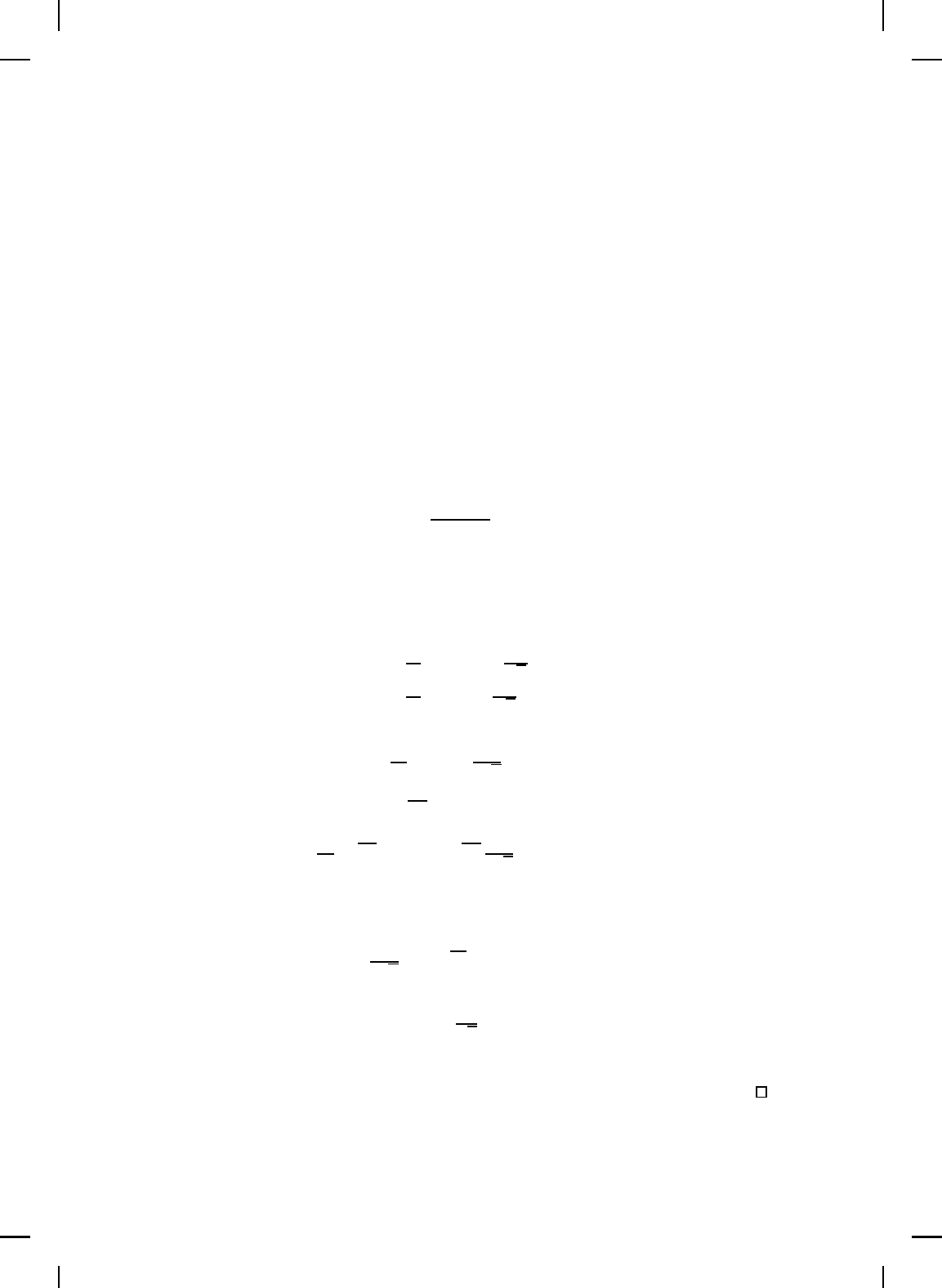
6
- - -
?
G
1
G
2
n
n
u
1
u
2
e
1
y
2
e
2
+
−
+
+
y
1
Figure 7.1 Feedback interconnection of G
1
and G
2
.
y =
˜
G[u] and (7.13) holds. Then the feedback interconnection of G
1
and
G
2
given in Figure 7.1 is, respectively, L
p
-stable, L
p
-stable with finite gain,
and L
p
-stable with finite gain and zero bias if
˜
G is L
p
-stable, L
p
-stable with
finite gain, and L
p
-stable with finite gain and zero bias.
The following result, known as small gain theorem provides a sufficient
condition for L
p
-stability of the feedback interconnection given by Figure 7.1.
Theorem 7.1. Let G
1
: L
m
pe
→ L
l
pe
and G
2
: L
l
pe
→ L
m
pe
be causal
operator dynamical systems such that the feedback interconnection given
by Figure 7.1 is well defined. If G
1
is L
p
-stable with finite gain γ
1
and
G
2
is L
p
-stable with finite gain γ
2
such that γ
1
γ
2
< 1, then the feedback
interconnection of G
1
and G
2
given in Figure 7.1 is L
p
-stable.
Proof. Since G
1
and G
2
are causal and L
p
-stable with finite gains γ
1
and γ
2
, respectively, it follows that there exist β
1
, β
2
> 0 su ch that for every
T > 0, e
1
∈ L
m
pe
, and e
2
∈ L
l
pe
,
|||(G
1
[e
1
])
T
|||
p
≤ γ
1
|||e
1T
|||
p
+ β
1
, (7.15)
|||(G
2
[e
2
])
T
|||
p
≤ γ
2
|||e
2T
|||
p
+ β
2
. (7.16)
Hence, it follows that
|||e
1T
|||
p
≤ |||u
1T
|||
p
+ |||(G
2
[e
2
])
T
|||
p
≤ |||u
1T
|||
p
+ γ
2
|||e
2T
|||
p
+ β
2
, (7.17)
and
|||e
2T
|||
p
≤ |||u
2T
|||
p
+ |||(G
1
[e
1
])
T
|||
p
≤ |||u
2T
|||
p
+ γ
1
|||e
1T
|||
p
+ β
1
. (7.18)
NonlinearBook10pt November 20, 2007
478 CHAPTER 7
Now, combining (7.17) and (7.18) yields
|||e
1T
|||
p
≤ |||u
1T
|||
p
+ β
2
+ γ
2
(|||u
2T
|||
p
+ γ
1
|||e
1T
|||
p
+ β
1
) , (7.19)
|||e
2T
|||
p
≤ |||u
2T
|||
p
+ β
1
+ γ
1
(|||u
1T
|||
p
+ γ
2
|||e
2T
|||
p
+ β
2
) , (7.20)
and h en ce,
|||e
1T
|||
p
≤
1
1 −γ
1
γ
2
(|||u
1T
|||
p
+ γ
2
|||u
2T
|||
p
+ β
2
+ γ
2
β
1
) , (7.21)
|||e
2T
|||
p
≤
1
1 −γ
1
γ
2
(|||u
2T
|||
p
+ γ
1
|||u
1T
|||
p
+ β
1
+ γ
1
β
2
) . (7.22)
Next, since y
1
= G
1
[e
1
] and y
2
= G
2
[e
2
] it follows f rom (7.15), (7.16), (7.21),
and (7.22) that
|||y
1T
|||
p
≤
γ
1
1 −γ
1
γ
2
(|||u
1T
|||
p
+ γ
2
|||u
2T
|||
p
+ β
2
+ γ
2
β
1
) + β
1
, (7.23)
|||y
2T
|||
p
≤
γ
2
1 −γ
1
γ
2
(|||u
2T
|||
p
+ γ
1
|||u
1T
|||
p
+ β
1
+ γ
1
β
2
) + β
2
. (7.24)
Now, the result follows from the fact that G
1
and G
2
are causal dynamical
systems.
7.4 Input-Output Dissipativity Theory
In this s ection, we introduce the concept of dissipative systems within the
context of operator d ynamical systems. In order to do this, we restrict our
attention to operator dynamical systems that map L
m
2e
to L
l
2e
. Note that
L
m
2
-space is a Hilbert space (see Problem 2.89) with the inner product
hu, yi
△
=
Z
∞
0
u
T
(t)y(t)dt, u(·), y(·) ∈ L
m
2
. (7.25)
For u, y ∈ L
m
2e
define hu, yi
T
△
= hu
T
, y
T
i. The following definition introduces
the notion of dissipativity for operator dynamical systems.
Definition 7. 5. Let G : L
m
2e
→ L
l
2e
be a causal operator dynamical
system and let Q ∈ S
l
, R ∈ S
m
, and S ∈ R
l×m
. G is (Q, R, S)- dissipative if
for every T > 0 and for every u ∈ L
m
2e
,
hy, Qyi
T
+ 2hy, Sui
T
+ hu, Rui
T
≥ 0, (7.26)
where y = G[u]. G is passive if f or every T > 0 and for every u ∈ L
m
2e
,
2hy, ui
T
≥ 0. G is input strict passive if there exists ε > 0 such that for
every T > 0 and for every u ∈ L
m
2e
, 2hy, ui
T
− εhu, ui
T
≥ 0. G is output
strict passive if there exists ε > 0 such that for every T > 0 and for every
u ∈ L
m
2e
, 2hy, ui
T
− εhy, yi
T
≥ 0. G is input-output strict passive if there
exist ε
1
, ε
2
> 0 such that for every T > 0 and for every u ∈ L
m
2e
, 2hy, ui
T
−
NonlinearBook10pt November 20, 2007
INPUT-OUTPUT STABILITY AND DISSIPATIVITY 479
ε
1
hy, yi − ε
2
hu, ui
T
≥ 0. Finally, G is nonexpansive with gain γ > 0 if for
every T > 0 and f or every u ∈ L
m
2e
, hy, yi
T
− γ
2
hu, ui
T
≤ 0.
The following result connects (Q, R, S)-dissipativity with L
2
-stability.
Theorem 7.2. Let G : L
m
2e
→ L
l
2e
be a causal operator dynamical
system and let Q ∈ S
l
, R ∈ S
m
, and S ∈ R
l×m
be such that Q < 0. If G is
(Q, R, S)-dissipative, then G is L
2
-stable.
Proof. Let M
△
= −Q and let λ > 0 be such that λI
m
+ R > 0 and
M −
1
λ
SS
T
≥ εI
l
for some ε > 0. (The existence of such a scalar λ can be
easily established.) Since G is (Q, R, S)-dissipative it follows that for every
T > 0 and u ∈ L
m
2
,
hy, Myi
T
≤ 2hy, Sui
T
+ hu, Rui
T
=
1
λ
hS
T
y, S
T
yi
T
+ λhu, ui
T
− h
1
√
λ
S
T
y −
√
λu,
1
√
λ
S
T
y −
√
λui
T
+hu, Rui
T
≤
1
λ
hS
T
y, S
T
yi
T
+ hu, (R + λI
m
)ui
T
, (7.27)
which implies that
εhy, yi
T
≤ hy, (M −
1
λ
SS
T
)yi
T
≤ hu, (R + λI
m
)ui
T
≤ (λ + λ
max
(R))hu, ui
T
. (7.28)
The result now follows immediately by noting that hy, yi
T
= |||y
T
|||
2
.
Corollary 7.1. Let G : L
m
2e
→ L
l
2e
be a causal operator dynamical
system. Then the following statements hold:
i) I f G is output strict passive, then G is L
2
-stable.
ii) If G is input-output strict passive, then G is L
2
-stable.
iii) If G is nonexpansive with gain γ > 0, then G is L
2
-stable.
Proof. The proof is a direct consequence of Theorem 7.2 with i)
Q = −εI
l
, R = 0, and S = I
l
, ii) Q = −ε
1
I
l
, R = −ε
2
I
l
, and S = I
l
, and
iii) Q = I
l
, R = − γ
2
I
l
, and S = 0.
Next, we provide a sufficient condition for input-output stability of a
feedback interconnection of two dissipative dynamical systems G
1
and G
2
.
NonlinearBook10pt November 20, 2007
480 CHAPTER 7
Theorem 7.3. Let G
1
: L
m
2e
→ L
l
2e
and G
2
: L
l
2e
→ L
m
2e
be causal
operator dynamical systems such that the feedback interconnection given
by Figure 7.1 is well defined. Furthermore, let Q
1
, R
2
∈ S
l
, Q
2
, R
1
∈ S
m
,
and S
1
, S
T
2
∈ R
l×m
be such that there exists a scalar σ > 0 such that
ˆ
Q
△
=
Q
1
+ σR
2
−S
1
+ σS
T
2
−S
T
1
+ σS
2
R
1
+ σQ
2
< 0.
If G
1
is (Q
1
, R
1
, S
1
)-dissipative and G
2
is (Q
2
, R
2
, S
2
)-dissipative, then the
feedback interconnection of G
1
and G
2
given in Figure 7.1 is L
2
-stable.
Proof. Since G
1
is (Q
1
, R
1
, S
1
)-dissipative and G
2
is (Q
2
, R
2
, S
2
)-
dissipative it follows that for every T > 0, e
1
∈ L
m
2e
, and e
2
∈ L
l
2e
,
hy
1
, Q
1
y
1
i
T
+ 2hy
1
, S
1
e
1
i
T
+ he
1
, R
1
e
1
i
T
≥ 0 (7.29)
and
σhy
2
, Q
2
y
2
i
T
+ 2σhy
2
, S
2
e
2
i
T
+ σhe
2
, R
2
e
2
i
T
≥ 0. (7.30)
Now, using e
1
= u
1
−y
2
and e
2
= u
2
+ y
1
, and combining (7.29) and (7.30)
yields
hy,
ˆ
Qyi
T
+ 2hy,
ˆ
Sui
T
+ hu,
ˆ
Rui
T
≥ 0, (7.31)
where u
△
= [u
T
1
, u
T
2
]
T
, y
△
= [y
T
1
, y
T
2
]
T
, and
ˆ
R
△
=
R
1
0
0 σR
2
,
ˆ
S
△
=
S
1
−σR
2
−R
1
σS
2
.
The result now is an immediate consequence of Theorem 7.2.
Corollary 7.2. Let G
1
: L
m
2e
→ L
l
2e
and G
2
: L
l
2e
→ L
m
2e
be causal
operator dynamical systems such that the feedback interconnection given
by Figure 7.1 is well defined. Then the following statements hold:
i) I f G
1
is input-output str ict passive and G
2
is passive, then th e feedback
interconnection of G
1
and G
2
given in Figure 7.1 is L
2
-stable.
ii) If G
1
and G
2
are input strict passive, then feedback interconnection of
G
1
and G
2
given in Figure 7.1 is L
2
-stable.
iii) If G
1
and G
2
are output strict passive, then the f eedback interconnec-
tion of G
1
and G
2
given in Figure 7.1 is L
2
-stable.
iv) If G
1
is input strict passive and L
2
-stable with finite gain and G
2
is
passive, then the feedback interconnection of G
1
and G
2
given in Figure
7.1 is L
2
-stable.
v) If G
1
is nonexp an s ive with gain γ
1
and G
2
is nonexp an s ive with gain
γ
2
such that γ
1
γ
2
< 1, then the feedback interconnection of G
1
and G
2
given in Figure 7.1 is L
2
-stable.
NonlinearBook10pt November 20, 2007
INPUT-OUTPUT STABILITY AND DISSIPATIVITY 481
Proof. i) The proof follows from Theorem 7.3 with l = m, σ = 1,
Q
1
= −ε
1
I
m
, R
1
= −ε
2
I
m
, S
1
= I
m
, Q
2
= 0, R
2
= 0, and S
2
= I
m
for some
ε
1
, ε
2
> 0.
ii) The proof follows from Theorem 7.3 with l = m, σ = 1, Q
1
= 0,
R
1
= −ε
1
I
m
, S
1
= I
m
, Q
2
= 0, R
2
= −ε
2
I
m
, and S
2
= I
m
for some
ε
1
, ε
2
> 0.
iii) The proof follows from Theorem 7.3 with l = m, σ = 1, Q
1
=
−ε
1
I
m
, R
1
= 0, S
1
= I
m
, Q
2
= −ε
2
I
m
, R
2
= 0, and S
2
= I
m
for some
ε
1
, ε
2
> 0.
iv) Note that if G
1
is input strict p assive and L
2
-stable with fi nite
gain, then there exist s calars ε > 0 and γ > 0 such that for every T > 0 and
e
1
∈ L
m
2e
,
2hy
1
, e
1
i
T
− εhe
1
, e
1
i
T
≥ 0 (7.32)
and
−hy
1
, y
1
i
T
+ γhe
1
, e
1
i
T
≥ 0. (7.33)
Now, let σ > 0 be such that σγ < ε. Addin g (7.32) to σ(7.33) yields
−σhy
1
, y
1
i
T
+ 2hy
1
, e
1
i
T
− (ε − σγ)he
1
, e
1
i
T
≥ 0,
which shows that G
1
is in put-output strict passive. The result now follows
from i).
v) Since γ
1
γ
2
< 1 there exists ε > 0 such that (γ
1
+ ε)γ
2
< 1. The
result now follows from Theorem 7.3 with σ = γ
1
+ ε, Q
1
= −I
l
, R
1
= γ
2
1
I
m
,
S
1
= 0, Q
2
= −I
m
, R
2
= γ
2
2
I
l
, and S
2
= 0.
7.5 Input-Output Operator Dissipativity Theory
In this section, we extend the concept of dissipative systems introdu ced in
Section 7.4. Once again, we restrict our attention to operator dynamical
systems that map L
m
2e
to L
l
2e
. The following definition introduces the notion
of operator dissipativity for operator dynamical systems.
Definition 7. 6. Let G : L
m
2e
→ L
l
2e
be a causal operator dynamical
system and let Q : L
l
2e
→ L
l
2e
, R : L
m
2e
→ L
m
2e
, and S : L
m
2e
→ L
l
2e
be
causal operators such that Q and R are self-adjoint.
3
G is (Q, R, S)-operator
dissipative if for every T > 0 and for every u ∈ L
m
2e
,
hy, Qyi
T
+ 2hy, Sui
T
+ hu, Rui
T
≥ 0, (7.34)
3
Given an operator X : L
p
2e
→ L
q
2e
, the operator X
∗
: L
q
2e
→ L
p
2e
is the adjoint operator of X
if for every u ∈ L
p
2e
and y ∈ L
q
2e
, hy, Xui = hX
∗
y , ui. An operator X : L
p
2e
→ L
p
2e
is self-adjoint
if for every u ∈ L
p
2e
and y ∈ L
q
2e
, hy, Xui = hXy, ui, that is, if X = X
∗
.
NonlinearBook10pt November 20, 2007
482 CHAPTER 7
where y = G[u].
The following result connects (Q, R, S)-operator dissipativity with L
2
-
stability.
Theorem 7.4. Let G : L
m
2e
→ L
l
2e
be a causal operator dynamical
system and let Q : L
l
2e
→ L
l
2e
, R : L
m
2e
→ L
m
2e
, and S : L
m
2e
→ L
l
2e
be causal
operators such that Q, R, and SS
∗
are bounded, that is, there exist positive
scalars q, r, and s such that hy, Qyi ≤ qhy, yi, y ∈ L
l
2e
, hu, Rui ≤ rhu, ui,
u ∈ L
m
2e
, hy, SS
∗
yi = hS
∗
y, S
∗
yi ≤ shy, yi, y ∈ L
l
2e
, Q and R are self-adjoint,
and there exists ε > 0 such that hy, Qyi < −εhy, yi. If G is (Q, R, S)-op erator
dissipative, then G is L
2
-stable.
Proof. Let M
△
= −Q and let λ > 0 be such that λ < s/ε. Since G is
(Q, R, S)-operator dissipative it follows th at for every T > 0 and u ∈ L
m
2
,
εhy, yi
T
≤ hy, Myi
T
≤ 2hy, Sui
T
+ hu, Rui
T
=
1
λ
hS
∗
y, S
∗
yi
T
+ λhu, ui
T
− h
1
√
λ
S
∗
y −
√
λu,
1
√
λ
S
∗
y −
√
λui
T
+hu, Rui
T
≤
1
λ
hS
∗
y, S
∗
yi
T
+ (r + λ)hu, ui
T
≤
s
λ
hy, yi
T
+ (r + λ)hu, ui
T
, (7.35)
which implies that
hy, yi
T
≤
λ(λ + r)
ελ − s
hu, ui
T
. (7.36)
The result now follows immediately by noting that hy, yi
T
= |||y
T
|||
2
.
Next, we provide a sufficient condition for input-output stability of a
feedback interconnection of two operator dissipative dynamical systems G
1
and G
2
.
Theorem 7.5. Let G
1
: L
m
2e
→ L
l
2e
and G
2
: L
l
2e
→ L
m
2e
be causal
operator dynamical systems such that the feedback interconnection given
by Figure 7.1 is well defined. Furthermore, let Q
1
, R
2
: L
l
2e
→ L
l
2e
, Q
2
, R
1
:
L
m
2e
→ L
m
2e
, and S
1
, S
∗
2
: L
m
2e
→ L
l
2e
be bounded causal operators such that
there exist scalar σ, ε > 0 and
ˆ
Q
△
=
Q
1
+ σR
2
−S
1
+ σS
∗
2
−S
∗
1
+ σS
2
R
1
+ σQ
2
satisfies hy,
ˆ
Qyi ≤ −εhy, yi, y ∈ L
l+m
2e
. If G
1
is (Q
1
, R
1
, S
1
)-operator
NonlinearBook10pt November 20, 2007
INPUT-OUTPUT STABILITY AND DISSIPATIVITY 483
dissipative and G
2
is (Q
2
, R
2
, S
2
)-operator dissipative, then feedback inter-
connection of G
1
and G
2
given in Figure 7.1 is L
2
-stable.
Proof. Since G
1
is (Q
1
, R
1
, S
1
)-operator dissipative and G
2
is (Q
2
, R
2
,
S
2
)-operator dissipative it follows that for every T > 0, e
1
∈ L
m
2e
, and
e
2
∈ L
l
2e
,
hy
1
, Q
1
y
1
i
T
+ 2hy
1
, S
1
e
1
i
T
+ he
1
, R
1
e
1
i
T
≥ 0 (7.37)
and
σhy
2
, Q
2
y
2
i
T
+ 2σhy
2
, S
2
e
2
i
T
+ σhe
2
, R
2
e
2
i
T
≥ 0. (7.38)
Now, using e
1
= u
1
−y
2
and e
2
= u
2
+ y
1
, and combining (7.37) and (7.38)
yields
hy,
ˆ
Qyi
T
+ 2hy,
ˆ
Sui
T
+ hu,
ˆ
Rui
T
≥ 0, (7.39)
where u
△
= [u
T
1
, u
T
2
]
T
, y
△
= [y
T
1
, y
T
2
]
T
, and
ˆ
R
△
=
R
1
0
0 σR
2
,
ˆ
S
△
=
S
1
−σR
2
−R
1
σS
2
.
The result now is an immediate consequence of Theorem 7.4.
7.6 Connections Between Input-Output Stability and
Lyapunov Stability
In this section, we provide connections between inpu t-output stability and
Lyapunov stability. Since Lyapunov stability theory deals with state space
dynamical systems we begin by considering nonlinear dynamical systems G
of the form
˙x(t) = F (x(t), u(t)), x(t
0
) = x
0
, t ≥ t
0
, (7.40)
y(t) = H(x(t), u(t)), (7.41)
where x(t) ∈ R
n
, u(t) ∈ R
m
, y(t) ∈ R
l
, F : R
n
× R
m
→ R
n
, and H :
R
n
× R
m
→ R
l
. For the dynamical system G given by (7.40) and (7.41)
defined on the state space R
n
, R
m
and R
l
define an input and output space,
respectively, consisting of continuous bounded functions on the semi-infinite
interval [0, ∞). The input and output spaces U and Y are assumed to be
closed un der the shift operator, that is, if u(·) ∈ U (respectively, y(·) ∈ Y),
then the function defined by u
T
△
= u(t + T ) (respectively, y
T
△
= y(t + T ))
is contained in U (respectively, Y) for all T ≥ 0. We assume that F (·, ·)
and H(·, ·) are continuously differentiable mappings in (x, u) and F (·, ·) has
at least one equilibrium so that, without loss of generality, F (0, 0) = 0 and
H(0, 0) = 0.
Theorem 7.6. Consider the n onlinear dynamical system G given by
(7.40) and (7.41). Assume that there exist a continuously differentiable
NonlinearBook10pt November 20, 2007
484 CHAPTER 7
function V : R
n
→ [0, ∞) and positive scalars α, β, γ
1
, γ
2
such that
αkxk
2
≤ V (x) ≤ βkxk
2
, x ∈ R
n
, (7.42)
V
′
(x)F (x, 0) ≤ −γ
1
kxk
2
, x ∈ R
n
, (7.43)
kV
′
(x)k ≤ γ
2
kxk, x ∈ R
n
. (7.44)
Furth ermore, assume that there exist positive scalars L, η
1
, and η
2
such that
kF (x, u) − F(x, 0)k ≤ Lkuk, (x, u) ∈ R
n
× R
m
, (7.45)
kH(x, u)k ≤ η
1
kxk + η
2
kuk, (x, u) ∈ R
n
× R
m
. (7.46)
Then, for every x
0
∈ R
n
and p ∈ [1, ∞], G is L
p
-stable with fin ite gain.
Proof. It f ollows from (7.43)–(7.45) that
V
′
(x)F (x, u) = V
′
(x)F (x, 0) + V
′
(x)[F (x, u) − F (x, 0)]
≤ −γ
1
kxk
2
+ γ
2
Lkxkkuk, x ∈ R
n
, u ∈ R
m
. (7.47)
Now, let u ∈ L
m
p
and let x(t), t ≥ 0, denote the solution to (7.40) with
x(0) = 0 and define W (t)
△
=
p
V (x(t)), t ≥ 0. First, consider the case in
which W (t) 6= 0, t > 0. In this case, it follows from (7.42) and (7.47) that
2W (t)
˙
W (t) =
˙
V (x(t))
= V
′
(x(t))F(x(t), u(t))
≤ −γ
1
kx(t)k
2
+ γ
2
Lkx(t)kku(t)k
≤ −
γ
1
β
V (x(t)) +
γ
2
L
√
α
V
1/2
(x(t))ku(t)k
= −
γ
1
β
W
2
(t) +
γ
2
L
√
α
W (t)ku(t)k, t > 0, (7.48)
which implies that
˙
W (t) +
γ
1
2β
W (t) ≤
γ
2
L
2
√
α
ku(t)k, t > 0. (7.49)
Now, multiplying (7.49) by e
γ
1
t
2β
, t ≥ 0, yields
d
dt
e
γ
1
t
2β
W (t)
≤ e
γ
1
t
2β
γ
2
L
2
√
α
ku(t)k, t > 0. (7.50)
Next, since W (0) = V
1/2
(x(0)) = 0, integrating (7.50) yields
W (t) ≤
γ
2
L
2
√
α
Z
t
0
e
−
γ
1
2β
(t−τ)
ku(τ)kdτ, t > 0. (7.51)
Now, it follows from (7.51) that there exists a constant γ > 0 su ch that
|||W |||
p
≤ γ|||u|||
p
and, since kx(t)k ≤
1
√
α
W (t), t ≥ 0, it follows that x(·) ∈ L
n
p
.
The result is now a direct consequence of (7.46). The case in which W (t) = 0,
t ≥ 0, is a straightforward extension of the proof above since W (t) = 0, t ≥ 0,
if and only if x(t) = 0, t ≥ 0.