Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.


29 Systems of particles
m
ω
ll
l
r
m
m
A
C
B
c.m.
Figure 1.14.
First consider the force acting on particle C due to particles A and B. In accordance with
Newton’s law of gravitation, the vertical components add to give
F
r
=−
√
3 Gm
2
l
2
0
=−
Gm
2
√
3 r
2
0
(1.162)
since l
0
=
√
3 r
0
. From the radial equation of motion for particle C we obtain
ma
r
= F
r
or
mr
0
ω
2
0
=
Gm
2
√
3 r
2
0
(1.163)
Thus, we obtain the angular velocity
ω
0
=
Gm
√
3 r
3
0
1/2
=
3Gm
l
3
0
1/2
(1.164)
Now let us assume the initial conditions r(0) = r
0
,
˙
r(0) = 0,ω(0) =
1
2
ω
0
. We can use
conservation of energy and of angular momentum to solve for the minimum value of r, and
therefore of l. Let us concentrate on particle C alone since the system values are three times
those of a single particle. The potential energy can be obtained by first recalling that the
radial force
F
r
=−
∂V
∂r
=−
Gm
2
√
3 r
2
(1.165)
which can be integrated to yield the general expression
V =−
Gm
2
√
3 r
(1.166)
where the integration constant is set equal to zero.

30 Introduction to particle dynamics
When r = r
min
we have
˙
r = 0 so the kinetic energy of particle C has the form
T =
1
2
mr
2
ω
2
(1.167)
Then, noting the initial conditions, the conservation of energy results in
T + V =
1
2
mr
2
ω
2
−
Gm
2
√
3 r
=
1
8
mr
2
0
ω
2
0
−
Gm
2
√
3 r
0
(1.168)
Conservation of angular momentum about the center of mass is expressed by the equation
H = mr
2
ω =
1
2
mr
2
0
ω
0
(1.169)
Hence
ω =
r
2
0
ω
0
2 r
2
(1.170)
Now substitue for ω from (1.170) into (1.168) and use (1.164). After some algebraic sim-
plification we obtain the quadratic equation
7r
2
− 8r
0
r +r
2
0
= 0 (1.171)
which has the roots
r
1,2
= r
0
,
1
7
r
0
(1.172)
one of which is the initial condition. Thus
r
min
=
1
7
r
0
and l
min
=
1
7
l
0
(1.173)
Friction
Systems with friction are characterized by the loss of energy due to relative motion of the
particles. Thus, in general, they are not conservative. The two principal types of frictional
forces to be considered here are linear damping and Coulomb friction.
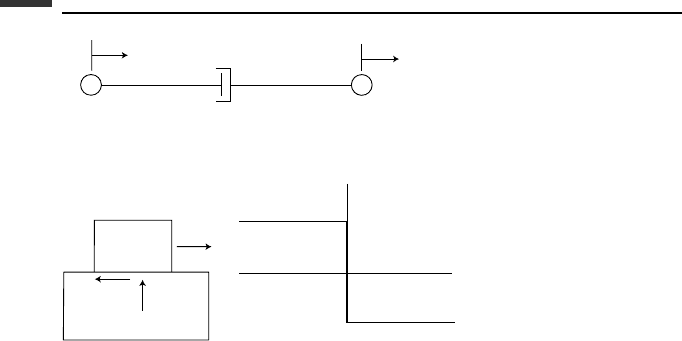
Linear damping
A linear viscous damper with a damping coefficient c is shown connected between two
particles in Fig. 1.15. It is assumed to be massless and produces a tensile force proportional
to the relative separation rate of the particles in accordance with the equation
F
i
= c (
˙
x
j
−
˙
x
i
) (1.174)
In other words, the damper force always opposes any relative motion of the particles and
therefore does negative work on the system, dissipating energy whenever a relative velocity
exists.
31 Systems of particles
m
i
x
i
m
j
c
x
j
Figure 1.15.
A
(a) (b)
B
µN
µN
v
r
−µN
v
r
F
f
N
Figure 1.16.
Coulomb friction
A Coulomb friction force is dissipative, like other friction forces, but is nonlinear; that is,
the friction force is a nonlinear function of the relative sliding velocity. As an example,
suppose that block A slides with velocity v
r
relative to block B, as shown in Fig. 1.16. The
force of block B acting on block A has a positive normal component N and a tangential
friction component µN , where the coefficient of sliding friction µ is independent of the
relative sliding velocity v
r
. In detail, the Coulomb friction force is
F
f
=−µN sgn(v
r
) (1.175)
where F
f
and v
r
are positive in the same direction and where sgn(v
r
) equals ± 1, depending
on the sign of v
r
. Note that F
f
is independent of the contact area.
In the case v
r
= 0, that is, for no sliding, the force of friction can have any magnitude
less than that required to initiate sliding. The actual force in this case is obtained from the
equations of statics. Although the force required to begin sliding is actually slightly larger
than that required to sustain it, we shall ignore this difference and assume that F
f
as a
function of v
r
is given by Fig. 1.16b or (1.175).
Since the magnitude |F
f
|≤µN , we see that the direction of the total force of block B
acting on block A cannot deviate from the normal to the sliding surface by more than an
angle φ where
tan φ = µ (1.176)
This leads to the idea of a cone of friction having a semivertex angle φ. The total force
vector must lie on or within the cone of friction. It lies on the cone during sliding.

32 Introduction to particle dynamics
m
m
c
P
k
x
1
x
3
x
2
Figure 1.17.
Example 1.8 Two blocks, each of mass m, are connected by a linear damper and spring
in series, as shown in Fig. 1.17. They can slide without friction on a horizontal plane. First,
we wish to derive the differential equations of motion.
Using Newton’s law of motion, we find that the x
1
equation is
m
¨
x
1
= c(
˙
x
3
−
˙
x
1
) (1.177)
Similarly, the x
2
equation is
m
¨
x
2
= k(x
3
− x
2
) (1.178)
We note that the forces in the damper and spring are equal, so we obtain the first-order
equation
c (
˙
x
3
−
˙
x
1
) = k (x
2
− x
3
) (1.179)
These are the three linear differential equations of motion. They are equivalent to five
first-order equations, so the total order of the system is five.
This system is unusual because the coordinate x
3
, which is associated with the connecting
point P between the damper and spring, does not involve displacement of any mass. This
results in an odd total order of the system rather than the usual even number. It is also
reflected in the degree of the characteristic equation and in the required number of initial
conditions.
Second method Let us assume the initial conditions
x
1
(0) = 0, x
2
(0) = 0, x
3
(0) = 0 (1.180)
and
˙
x
1
(0) = 0,
˙
x
2
(0) = v
0
(1.181)
We see from (1.179) that
˙
x
3
(0) = 0.
The analysis of this system can be simplified if we notice that the center of mass moves
at a constant velocity
1
2
v
0
due to conservation of linear momentum. Thus, a frame moving
with the center of mass is an inertial frame, and Newton’s laws of motion apply relative
to this frame. Let us use the coordinates x
1c
, x
2c
, x
3c
for positions relative to the center of
mass frame and assume that the origins of the two frames coincide at t = 0. Then we have
the initial conditions
x
1c
(0) = 0, x
2c
(0) = 0, x
3c
(0) = 0 (1.182)

33 Systems of particles
and
˙
x
1c
(0) =
˙
x
3c
(0) =−
1
2
v
0
,
˙
x
2c
(0) =
1
2
v
0
(1.183)
In general, x
1c
and x
2c
move as mirror images about the center of mass, so we can take
x
1c
=−x
2c
(1.184)
and simplify by writing equations of motion for x
2c
and x
3c
only as dependent variables.
We obtain, similar to (1.178) and (1.179),
m
¨
x
2c
+ kx
2c
− kx
3c
= 0 (1.185)
c
˙
x
3c
+ c
˙
x
2c
− kx
2c
+ kx
3c
= 0 (1.186)
To obtain some idea of the nature of the system response, we can assume solutions of
the exponential form e
st
, and obtain the resulting characteristic equation which turns out
to be a cubic polynomial in s. One root is zero and the other two have negative real parts.
Thus, the solutions for x
2c
and x
3c
each consist of two exponentially decaying functions of
time plus a constant. As time approaches infinity, the exponential functions will vanish with
x
2c
= x
3c
and no force in the spring or damper. The length of the linear damper, however,
will have increased by 2x
3c
compared with its initial value.
Finally, to obtain the solutions in the original inertial frame, we use
x
1
=−x
2c
+
1
2
v
0
t (1.187)
x
2
= x
2c
+
1
2
v
0
t (1.188)
x
3
= x
3c
+
1
2
v
0
t (1.189)
Thus, in their final motion, the blocks each move with a velocity
1
2
v
0
and a separation
somewhat larger than the original value.
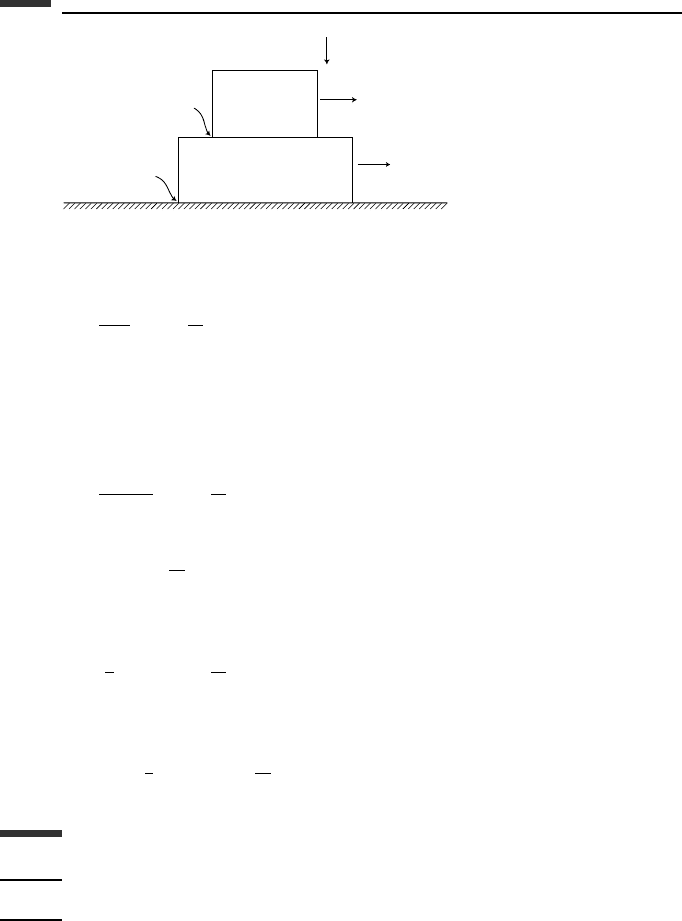
Example 1.9 Two stacked blocks, each of mass m, slide relative to each other as they
move along a horizontal floor, as shown in Fig. 1.18. Suppose that the initial conditions
are x
A
(0) = 0,
˙
x
A
(0) = v
0
, x
B
(0) = 0,
˙
x
B
(0) = 0. We wish to solve for the time when
sliding stops and the final positions of the blocks, assuming a coefficient of friction µ = 0.5
between the two blocks, and µ = 0.1 between block B and the floor.
The Coulomb friction force between blocks A and B is 0.5mg whereas the friction force
between block B and the floor is 0.2mg. The friction forces oppose relative motion so the
initial accelerations of blocks A and B are
¨
x
A
=−0.5g (1.190)
¨
x
B
= (0.5 − 0.2)g = 0.3g (1.191)
34 Introduction to particle dynamics
µ = 0.1
µ = 0.5
A
B
m
g
m
x
B
x
A
Figure 1.18.
Thus the relative acceleration between blocks A and B is 0.8g and the time to stop sliding
is
t
1
=
v
0
0.8g
= 1.25
v
0
g
(1.192)
At this time the common velocity of the two blocks is
v
1
=
¨
x
B
t
1
= 0.375v
0
(1.193)
When t > t
1
, A and B will slide as a single block of mass 2m with an acceleration equal
to −0.1g. The stopping time for this combination is
t
2
=
0.375v
0
0.1g
= 3.75
v
0
g
(1.194)
Thus the time required for sliding to stop completely is
t = t
1
+ t
2
= 5
v
0
g
(1.195)
The final displacement of block B is equal to its average velocity multiplied by the total
time. We obtain
x
B
=
1
2
v
1
t = 0.9375
v
2
0
g
(1.196)
The final displacement of block A is equal to x
B
plus the displacement of A relative
to B.
x
A
= x
B
+
1
2
v
0
t
1
= 1.5625
v
2
0
g
(1.197)
1.3 Constraints and configuration space
Generalized coordinates and configuration space
Consider a system of N particles. The configuration of this system is specified by giving
the locations of all the particles. For example, the inertial location of the first particle
might be given by the Cartesian coordinates (x
1
, x
2
, x
3
), the location of the second particle
by (x
4
, x
5
, x
6
), and so forth. Thus, the configuration of the system would be given by

35 Constraints and configuration space
(x
1
, x
2
,...,x
3N
). In the usual case, the particles cannot all move freely but are at least
somewhat constrained kinematically in their differential motions, if not in their large motions
as well. Under these conditions, it is usually possible to give the configuration of the system
by specifying the values of fewer than 3N parameters. These n ≤ 3N parameters are called
generalized coordinates (qs) and are related to the xsbythetransformation equations
x
k
= x
k
(q
1
, q
2
,...,q
n
, t)(k = 1,...,3N ) (1.198)
The qs are not necessarily uniform in their dimensions. For example, the position of a
particle in planar motion may be expressed by the polar coordinates (r,θ) which have
differing dimensions. Thus, generalized coordinates may include common coordinate
systems. However, a generalized coordinate may also be chosen such that it is not identified
with any of the common coordinate systems, but represents a displacement form or shape
involving several particles. In this case, the generalized coordinate is defined assuming
certain displacement ratios and relative directions among the particles. For example, a
generalized coordinate might consist of equal radial displacements of particles at the
vertices of an equilateral triangle.
Frequently one attempts to find a set of independent generalized coordinates, but this
is not always possible. So, in general, we assume that there are m independent equations
of constraint involving the qs and possibly the
˙
qs. If, for the same system, there are l
independent equations of constraint involving the 3Nxs (and possibly the corresponding
˙
xs), then
3N − l = n − m (1.199)
and this is equal to the number of degrees of freedom. The number of degrees of freedom
is, in general, a property of the system and not of the choice of coordinates.
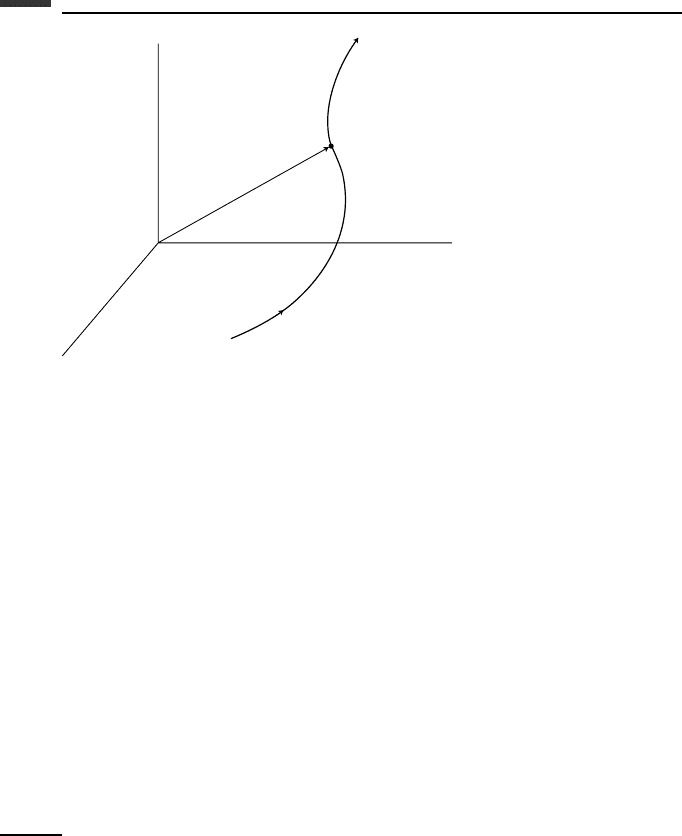
Since the configuration of a system is specified by the values of its n generalized coordi-
nates, one can represent any particular configuration by a point in n-dimensional configu-
ration space (Fig. 1.19). If the values of all the qs and
˙
qs are known at some initial time t
0
,
then, as time proceeds, the configuration point C will trace a solution path in configuration
space in accordance with the dynamical equations of motion and any constraint equations.
For the case of independent qs, the curve will be continuous but otherwise not constrained.
If, however, there are holonomic constraints expressed as functions of the qs and possibly
time, then the solution point must remain on a hypersurface having fewer than n dimensions,
and which may be moving and possibly changing shape. In general, then, one can represent
an evolving mechanical system by an n-dimensional vector q, drawn from the origin to the
configuration point C, tracing a path in configuration space as time proceeds. This will be
discussed further in Chapter 2.
Holonomic constraints
Suppose that the configuration of a system is specified by n generalized coordinates
(q
1
,..., q
n
) and assume that there are m independent equations of constraint of the form
φ
j
(q
1
,..., q
n
, t) = 0(j = 1,..., m) (1.200)
36 Introduction to particle dynamics
O
C
q
n
q
2
q
1
q
Figure 1.19.
A constraint of this form is called a holonomic constraint. A dynamical system whose
constraint equations, if any, are all of the holonomic form is called a holonomic system.
An example of a holonomic constraint is provided by a particle which is forced to move
on a sphere of radius R centered at the origin of a Cartesian frame. In this case the equation
of constraint is
φ
j
= x
2
+ y
2
+ z
2
− R
2
= 0 (1.201)
where (x, y, z) is the location of the particle. The sphere is a two-dimensional constraint
surface which is embedded in a three-dimensional Cartesian space.
The configuration of a holonomic system can always be specified using a minimal set of
generalized coordinates equal in number to the degrees of freedom. This is also the number
of dimensions of the constraint hypersurface, that is, n − m. Hence it is always possible
in theory to find a set of independent qs describing a holonomic system. For the case of a
spherical constraint surface, one could use angles of latitude and longitude to describe the
position of a particle. Another possibility might be to use the cylindrical coordinates φ and
z as qs, where φ effectively gives the longitude and z the latitude.
Nonholonomic constraints
Nonholonomic constraints may have the general form
f
j
(q,
˙
q, t) = 0(j = 1,..., m) (1.202)
but usually they have a simpler form which is linear in the velocities. Thus, we nearly
always assume that nonholonomic constraints have the form
f
j
=
n
i=1
a
ji
(q, t)
˙
q
i
+ a
jt
(q, t) = 0(j = 1,..., m) (1.203)

37 Constraints and configuration space
or the alternate differential form
n
i=1
a
ji
(q, t) dq
i
+ a
jt
(q, t) dt = 0(j = 1,..., m) (1.204)
where, in either case, these expressions are not integrable. If either expression were inte-
grable, then a function φ
j
(q, t) would exist and (1.200) would apply, indicating that the
constraint is actually holonomic. In this case, we would have
˙
φ
j
(q,
˙
q, t) =
n
i=1
∂φ
j
∂q
i
˙
q
i
+
∂φ
j
∂t
= 0 (1.205)
and, comparing (1.203) and (1.205), we find that
a
ji
≡
∂φ
j
∂q
i
, a
jt
≡
∂φ
j
∂t
(i = 1,...,n; j = 1,...,m) (1.206)
for this holonomic constraint. We conclude that holonomic and “linear” nonholonomic
constraints can be expressed in the forms of (1.203) and (1.204). The holonomic case
is distinguished by its integrability. Note that the coefficients a
ji
(q, t) and a
jt
(q, t)are
generally nonlinear in the qs and t.
Other constraint classifications
A constraint is classed as scleronomic if the time t does not appear explicitly in the equation
of constraint. Otherwise, it is rheonomic. Thus, a scleronomic holonomic constraint has the
form
φ
j
(q) = 0 (1.207)
A scleronomic nonholonomic constraint has the form
n
i=1
a
ji
(q)
˙
q
i
= 0 (1.208)
where we note that a
jt
≡ 0.
Constraints having a
jt
= 0, or a
ji
= a
ji
(q, t), or φ
j
= φ
j
(q, t) are classed as rheonomic
constraints. Typical examples of rheonomic constraints are a rod of varying length l(t)
connecting two particles in the holonomic case, or a knife edge whose orientation angle is
an explicit function of time in the nonholonomic case.
A catastatic constraint has ∂φ
j
/∂t ≡ 0 if holonomic, or a
jt
≡ 0 if nonholonomic.
Catastatic constraints have an important place in dynamical theory. Note that all scleronomic
constraints are also catastatic, but not necessarily vice versa. For example, a nonholonomic
constraint having the form
n
i=1
a
ji
(q, t)
˙
q
i
= 0 (1.209)
is catastatic but is not scleronomic.

38 Introduction to particle dynamics
Dynamical systems can also be classified as scleronomic or rheonomic. A scleronomic
system satisfies the conditions that: (1) all constraints, if any, are scleronomic; and (2)
the transformation equations, given by (1.198), which relate inertial Cartesian coordinates
and generalized coordinates do not contain time explicitly. As an example illustrating the
importance of the second condition, consider a particle moving on a spherical surface,
centered at the origin, whose radius R(t) is a known function of time. We can use the
spherical coordinates θ and φ as independent generalized coordinates, that is, there are no
constraints on the qs. Hence, the first condition is satisfied. The transformation equations,
however, are
x = R(t) sin θ cos φ
y = R(t ) sin θ sin φ (1.210)
z = R(t) cos θ
These transformation equations do not satisfy the second condition, so the system is rheo-
nomic.
Another classification of dynamical systems involves the categories catastatic or
acatastatic. A catastatic system satisfies the conditions that: (1) all constraints, if any,
are catastatic; and (2) the system is capable of being continuously at rest by setting all the
˙
qs equal to zero. This implies that ∂ x
k
/∂t ≡ 0fork = 1,...,3N ; that is, for all the trans-
formation equations. In other words, x
k
= x
k
(q) in agreement with the second condition
for a scleronomic system. Acatastatic means not catastatic.
Accessibility
Constraint equations, either holonomic or nonholonomic, are kinematic in nature; that is,
they put restrictions on the possible motions of a system, irrespective of the dynamical
equations. There is an important difference in these possible motions that distinguishes
holonomic from nonholonomic systems. It lies in the accessibility of points in configuration
space. For the case of holonomic constraints, the configuration point moves in a reduced
space of (n − m) dimensions since it must remain on each of m constraint surfaces, that is,
on their common intersection. Thus, certain regions of n-dimensional configuration space
are no longer accessible.
By contrast, for nonholonomic constraints, it is the differential motions which are con-
strained. Since the differential equations representing these nonholonomic constraints are
not integrable, there are no finite constraint surfaces in configuration space and there is
no reduction of the accessible region. In other words, by properly choosing the path, it is
possible to reach any point in n-dimensional q-space from any other point. As an exam-
ple, a scleronomic nonholonomic constraint, as given in (1.208), can be represented by an
(n − m)-dimensional planar differential surface element. Any differential displacement dq
must lie within that plane but is otherwise unconstrained. It is possible, however, to steer
the configuration point C and its differential element to any point of configuration space,
provided that more than one degree of freedom exists. A scleronomic system with only one