Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.

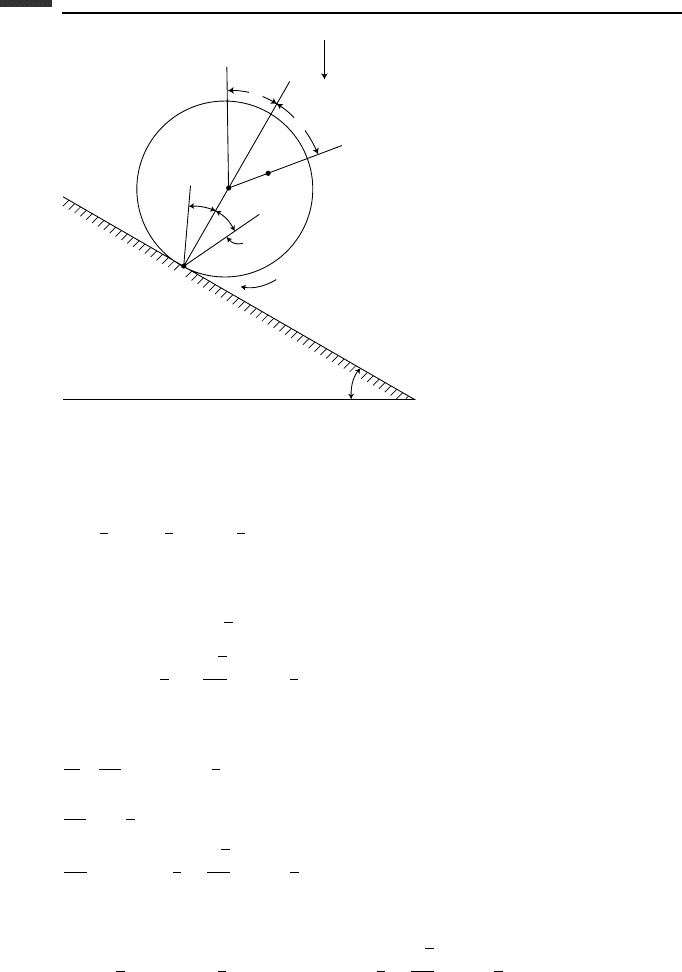
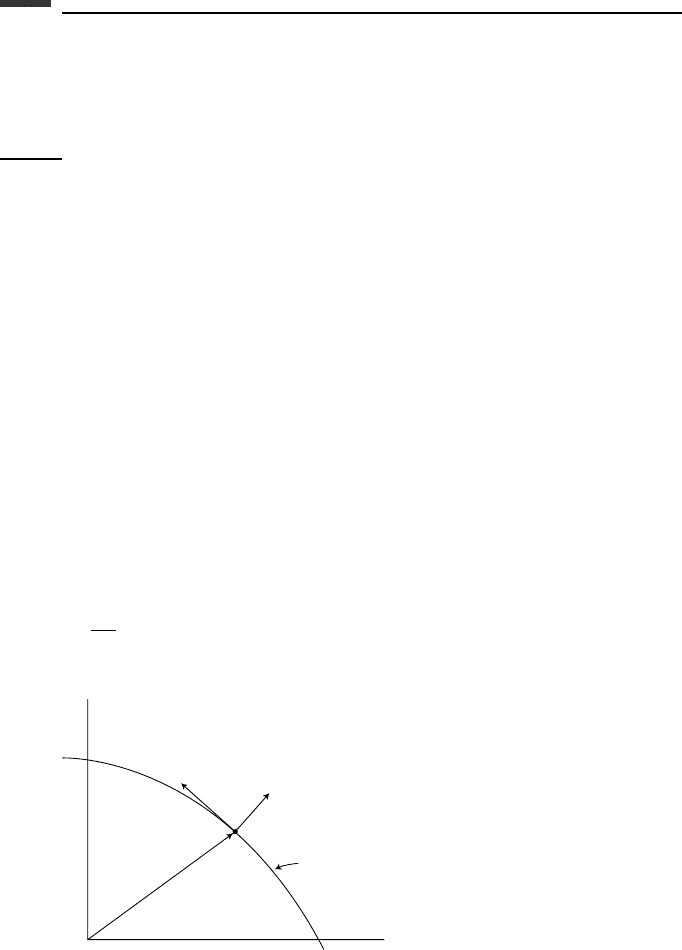
109 Dissipative and gyroscopic forces
α
φ
φ
m
r
g
r
1
–
2
cone of
friction
O
C
µ
α
θ
Figure 2.10.
where the coefficient of
˙
θ is equal to the distance from C to the particle.
The kinetic energy is
T =
1
2
mv
2
=
1
2
mr
2
˙
θ
2
5
4
+ cos θ
(2.267)
The potential energy is
V = mg
−rθ sin α +
1
2
r cos(θ + α)
= mgr
−
1
2
θ +
√
3
4
cos θ −
1
4
sin θ
(2.268)
We find that
d
dt
∂T
∂
˙
θ
= mr
2
¨
θ
5
4
+ cos θ
− mr
2
˙
θ
2
sin θ (2.269)
∂T
∂θ
=−
1
2
mr
2
˙
θ
2
sin θ (2.270)
∂V
∂θ
=−mgr
1
2
+
√
3
4
sin θ +
1
4
cos θ
(2.271)
From (2.265) the differential equation of motion, assuming no slipping, is found to be
mr
2
¨
θ
5
4
+ cos θ
−
1
2
mr
2
˙
θ
2
sin θ − mgr
1
2
+
√
3
4
sin θ +
1
4
cos θ
= 0 (2.272)

110 Lagrange’s and Hamilton’s equations
The angle θ at which slipping begins can be obtained directly by using the cone of friction.
First, note that since the disk is massless there is no resistance to angular acceleration about
the particle. Hence, there can be no applied moment about the particle. This means that the
line of action of the force at the contact point C must pass through the particle. If this line
of action lies within the cone of friction, there is no slipping. But slipping begins when θ
reaches 90
◦
, at which time
tan φ =
1
2
r
r
= µ (2.273)
and the particle lies on the cone of friction.
Slipping will continue as long as the particle is outside the cone of friction but will end
when it re-enters the cone at
θ = 90
◦
+ 2φ = 143.1
◦
(2.274)
During the period when the particle is outside the cone of friction, the force at C must drop
to zero since the line of action of any force must pass through the particle and lie on or
within that cone. Thus, the particle moves in free fall under the action of gravity during the
slipping period, and continuously approaches the inclined plane. It is reasonable to assume
that the disk maintains contact with the plane during the free fall of the particle since
¨
θ is
continuously positive and one might consider the effect of an infinitesimal rotational inertia
about the particle.
At the instant when the particle re-enters the cone of friction, the sliding suddenly stops
and the particle velocity must be perpendicular to the cone of friction. This means that an
impulse must be applied to the particle to cause a sudden change in velocity, namely, the
velocity component toward C due to sliding must be canceled. Finally, notice that the range
of values of θ over which slipping occurs turns out to be independent of the inclination
angle α.
2.5 Configuration space and phase space
Configuration space
In Chapter 1 we introduced the idea of configuration space. We defined the configuration
of a system to be specified by the values of its n generalized coordinates. Thus, at any given
time, the configuration is represented by a configuration point C having a position vector q
in an n-dimensional configuration space or q-space. As time proceeds, the point C traces
a solution path or trajectory in configuration space (Fig. 1.19).
If the system has m holonomic constraints of the form
φ
j
(q, t) = 0(j = 1,...,m) (2.275)
each constraint is represented by a surface in configuration space on which the configuration
point C must move. Thus, for m independent holonomic constraints, the point C is confined
111 Configuration space and phase space
to the common intersection of these surfaces, which is itself a subspace of (n − m) dimen-
sions. In general, the constraint surfaces are moving, but they are fixed if the constraints are
scleronomic of the form φ
j
(q).
It is always possible to give the location of C within the constraint intersection subspace
by defining (n − m) new generalized coordinates which are independent and specify the
configuration of the system. In other words, it is always possible, in theory, to find a set of
(n − m) independent generalized coordinates which are consistent with the constraints and
define the configuration of a holonomic system. These independent qs can then be used in
writing equations of motion by means of Lagrange’s equations.
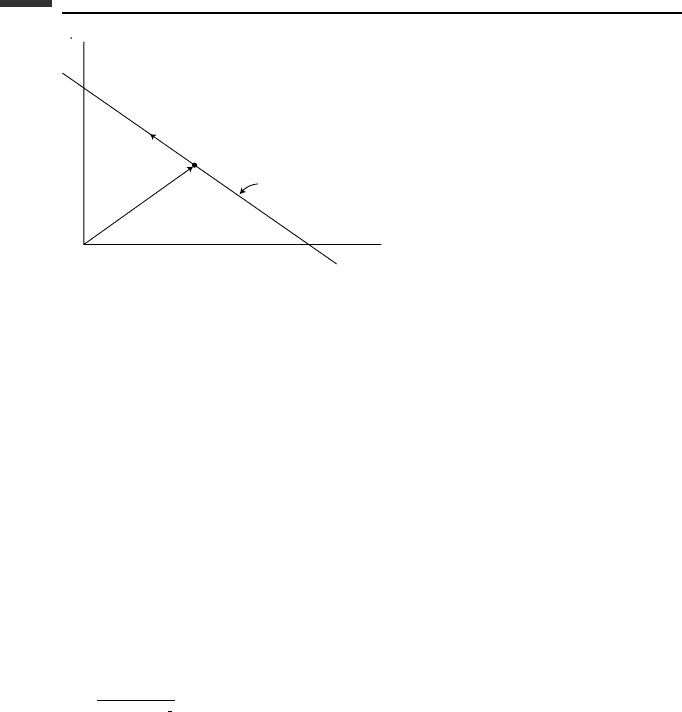
A virtual displacement δq which is consistent with the holonomic constraint
φ
j
(q
1
,...,q
n
, t) = 0 (2.276)
must satisfy the instantaneous constraint equation
n
i=1
∂φ
j
∂q
i
δq
i
= 0 (2.277)
The coefficients of ∂φ
j
/∂q
i
are components of the gradient vector which is perpendicular
to the constraint surface. Equation (2.277) states that the dot product of the gradient vector
and δq in configuration space is equal to zero. Hence, the two vectors are orthogonal and
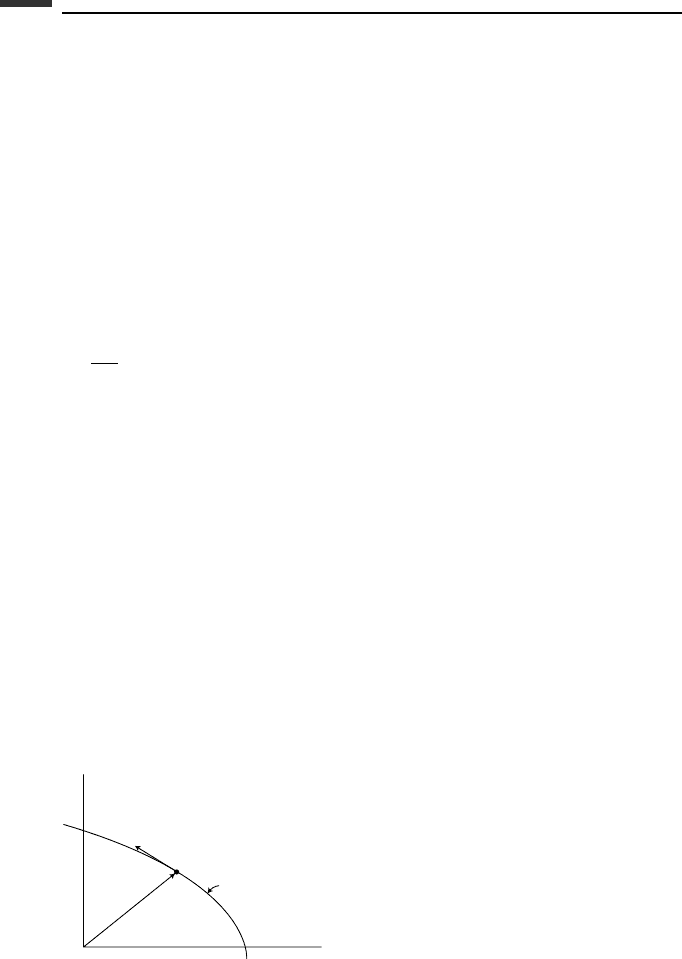
δq must lie in the tangent plane at the operating point C (Fig. 2.11).
Now let us suppose there are m nonholonomic constraints acting on the system. The
constraints have the general form
f
j
(q,
˙
q, t) = 0(j = 1,...,m) (2.278)
or, in the usual linear case,
n
i=1
a
ji
(q, t)
˙
q
i
+ a
jt
(q, t) = 0(j = 1,...,m) (2.279)
There are no constraint surfaces in configuration space because the constraint equations
are not integrable. Since there are no constraint surfaces, the entire n-dimensional space
is accessible to the configuration point C. We see that nonholonomic constraints, for any
φ
j
(q, t) = 0
q
2
δq
C
q
q
1
Figure 2.11.
112 Lagrange’s and Hamilton’s equations
given configuration and time, are essentially restrictions on the possible velocities of the
system. For the common case of catastatic constraints (a
jt
= 0), the restrictions are on the
possible directions of
˙
q rather than on its magnitude.
Any virtual displacements of a nonholonomic system must satisfy the Chetaev equation
n
i=1
∂ f
j
∂
˙
q
i
δq
i
= 0(j = 1,...,m) (2.280)
or, more commonly,
n
i=1
a
ji
(q, t)δq
i
= 0(j = 1,...,m) (2.281)
which is the instantaneous or virtual constraint equation. The coefficients a
ji
represent
components of a vector associated with the j th constraint and which is normal to the
differential surface in which any virtual displacement δq must lie. By properly steering
the configuration point C and its associated (n − m)-dimensional differential surface, it is
always kinematically possible to go between any two points of configuration space if all
the constraints are nonholonomic and there are at least two degrees of freedom.
It is sometimes convenient to represent solution paths in an extended configuration space
or event space of n + 1 dimensions consisting of the nqs and time. In this space, a solution
path will never cross itself. Also, constraint surfaces corresponding to rheonomic holonomic
constraints will be fixed rather than moving. When one considers variational methods in
dynamics, some procedures are more easily visualized in extended configuration space.
Phase space
We have seen that Lagrange’s equations for a dynamical system are n second-order differ-
ential equations whose solutions q
i
(t) are conveniently expressed as paths in configuration
space. For a given dynamical system, there is more than one possible path through a given
configuration point because of the variety of possible velocities.
Now consider Hamilton’s canonical equations for a holonomic system. They are 2n first-
order differential equations giving
˙
qs and
˙
ps as functions of (q, p, t ). We can consider the
qs and ps together to form a 2n-vector x = (q
1
,...,q
n
, p
1
,..., p
n
) and then the equations
of motion have the form
˙
x
i
= X
i
(x , t )(i = 1,...,2n) (2.282)
The motion of the system can be represented by the path of a phase point P moving in
the 2n-dimensional phase space. Note that a point in phase space specifies not only the
configuration but also the state of motion as represented by the ps.
Phase space is particularly convenient in presenting the possible motions of a conservative
holonomic system. In this case the Hamiltonian function is not an explicit function of time,
and the equations of motion have the form
˙
x
i
= X
i
(x )(i = 1,...,2n) (2.283)
113 Configuration space and phase space
or, in detail,
˙
q
i
=
∂ H (q, p)
∂p
i
,
˙
p
i
=−
∂ H (q, p)
∂q
i
(i = 1,...,2n) (2.284)
Because the system is conservative the Hamiltonian function is constant, that is
H(q, p) = h (2.285)
where h is usually evaluated from the initial conditions. This equation represents a surface
in phase space, and the corresponding trajectory must lie entirely on this surface. From
(2.283) or (2.284) we see that the direction of motion is given at all ordinary points where
the velocity is not zero. Hence, there is only one trajectory through each point, and every
trajectory is fixed. Thus, the whole of phase space with its trajectories represents the totality
of all possible motions of a conservative system.
A point in phase space at which all the
˙
qs and
˙
ps are zero is known as an equilibrium point
or singular point. The corresponding trajectory consists of the equilibrium point only. If we
make the usual assumption that the Hamiltonian function has at least two partial derivatives
with respect to the qs and ps, it can be shown that an infinite time is required to enter or
leave an equilibrium point. Thus, although more than one trajectory may apparently pass
through an equilibrium point, it cannot do so in a finite time.
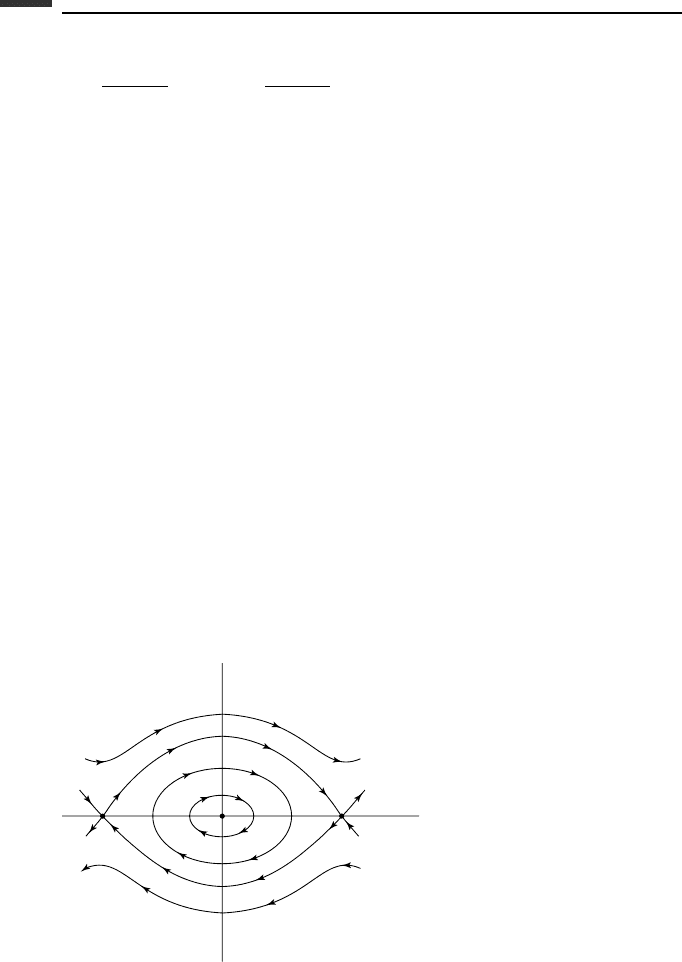
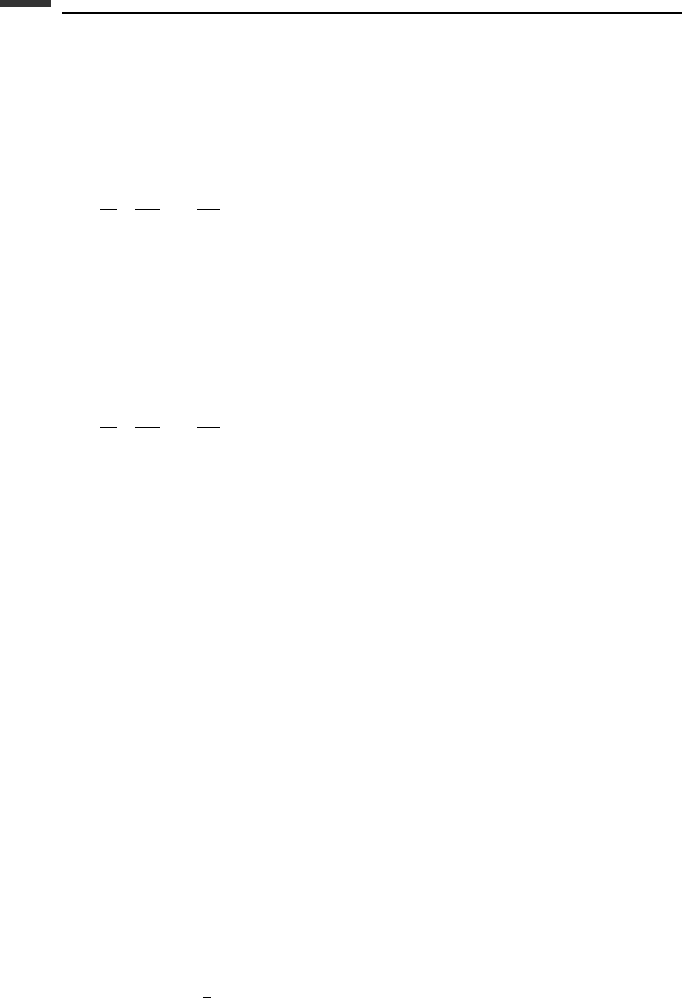
As a simple example of phase space methods, consider the phase plane diagram of
Fig. 2.12 which shows the possible solution paths in qp-space for a simple pendulum. Here
q is the pendulum angle and p is the corresponding angular momentum. There is a position
of stable equilibrium at A, corresponding to θ = 0. Points B and C represent unstable
equilibrium positions at θ =±π.
Now suppose that solution curves are traced in a 2n-dimensional state space consisting
of the nqs and n
˙
qs. If one knows the state of a system at a certain initial time t
0
, then the
differential equations will determine its further motion. This is equivalent to knowing the
q
C
A
B
p
Figure 2.12.
114 Lagrange’s and Hamilton’s equations
initial values of the qs and ps in phase space. Thus, the trajectories in state space are similar
to those in phase space. In particular, the equilibrium points of conservative holonomic
systems occur at the same values of qs in both spaces.
Velocity space
The concept of velocity space is important in the analysis of nonholonomic systems. Non-
holonomic constraints are essentially constraints on the velocities (
˙
qs) of a system for a
given configuration and time, whereas holonomic constraints restrict the possible configu-
rations (qs) at a given time. Thus, the role of
˙
qs for nonholonomic constraints is similar to
that of qs for holonomic constraints.
Velocity space is the n-dimensional space of the
˙
qs. Nonholonomic constraints can be
represented as surfaces in velocity space, where the qs and t are regarded as parameters.
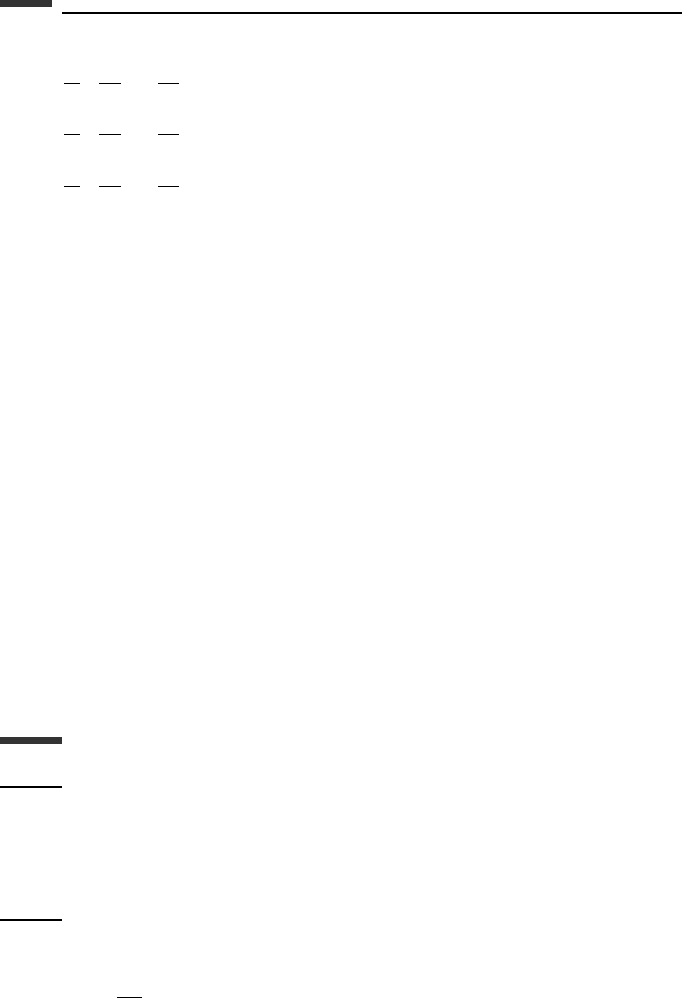
For example, consider a general nonholonomic constraint of the form
f
j
(q,
˙
q, t) = 0 (2.286)
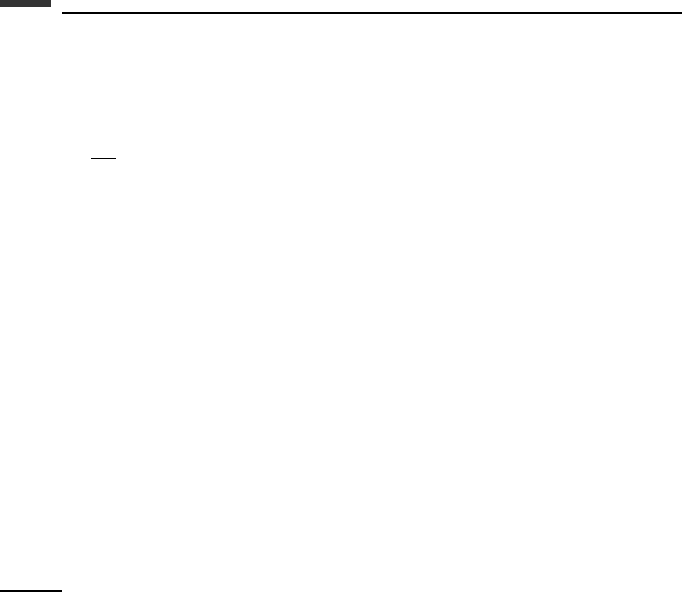
which is represented as a curved surface in velocity space (Fig. 2.13).
The constraint force C
j
is perpendicular to the constraint surface; that is, its components
are proportional to ∂ f
j
/∂
˙
q
i
(i = 1,...,n) which are the components of the gradient vector
in velocity space. A virtual velocity vector δw must lie in the tangent plane at the operating
point P. Therefore, δw and C
j
are orthogonal, implying that
n
i=1
C
ji
δw
i
= 0 (2.287)
similar to a virtual work expression, or
n
i=1
∂ f
j
∂
˙
q
i
δw
i
= 0 (2.288)
q
2
q
1
q
P
δw
C
j
f
j
(q, q, t) = 0
.
.
.
.
Figure 2.13.
115 Configuration space and phase space
q
2
q
1
δw
P
constraint
plane
q
.
.
Figure 2.14.
Comparing (2.288) with the Chetaev expression of (2.280) for virtual displacements, we
see that the virtual velocity vector δw and the virtual displacement vector δq are constrained
to the same allowable directions in space.
Now consider the common case where there are nonholonomic constraints of the linear
form
n
i=1
a
ji
(q, t)
˙
q
i
+ a
jt
(q, t) = 0(j = 1,...,m) (2.289)
Each constraint is represented by a plane in velocity space (Fig. 2.14). The virtual velocity
δw can be considered as a variation δ
˙
q with q and t fixed, and must satisfy
n
i=1
a
ji
(q, t)δw
i
= 0(j = 1,...,m) (2.290)
Therefore, it must lie in the (n − m)-dimensional intersection of the constraint planes.
The distance d from the origin of a constraint plane in velocity space is
d =
|a
jt
|
i
a
2
ji
1
2
(2.291)
We see that if the nonholonomic constraint is catastatic (a
jt
= 0), then the constraint plane
goes through the origin. In this case, if a velocity
˙
q satisfies the constraints, then
˙
q multiplied
by an arbitrary scalar constant also satisfies the constraints. Thus, for the rather common
case of catastatic constraints, the effect of nonholonomic constraints on a system is to
restrict the possible directions of
˙
q but not its magnitude.
When one considers conservative systems which also have catastatic nonholonomic con-
straints, there is a temptation to consider the energy integral as an additional nonholonomic
constraint. There are, however, qualitative differences between ordinary kinematic con-
straints and energy constraints. For a given configuration and time, an energy constraint is
actually a constraint on the kinetic energy, and is represented in velocity space by a closed
116 Lagrange’s and Hamilton’s equations
surface which surrounds the origin. This means that an energy constraint does not restrict
the direction of
˙
q, but for any given direction, its magnitude is specified. On the other hand,
we found that linear catastatic constraints restrict the possible directions of
˙
q but not the
magnitude.
As a natural application of velocity space methods, let us consider the derivation of
Jourdain’s principle. We start with Lagrange’s principle as expressed in (2.33), namely,
n
i=1
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
− Q
i
δq
i
= 0 (2.292)
where the δqs satisfy the instantaneous constraints expressed in (2.280) or (2.281).
Lagrange’s principle applies to holonomic or nonholonomic systems and leads to (n − m)
differential equations of motion if there are m constraints. A comparison of (2.281) which
constrains the δqs in configuration space with (2.290) which constrains the δws in velocity
space shows that the corresponding δqs and δws are proportional. Hence, we can substitute
δw
i
for δq
i
in (2.292). We obtain
n
i=1
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
− Q
i
δw
i
= 0 (2.293)
This is Jourdain’s principle. The variation δw is considered to take place in velocity space
at an operating point P on the common intersection of the constraint planes. By choosing
(n − m) independent sets of δws which satisfy the constraints expressed in (2.290), one can
use Jourdain’s principle to obtain (n − m) second-order differential equations of motion.
In addition, there are m constraint equations, making a total of n equations to solve for the
nqs.
Example 2.12 Let us apply Jourdain’s principle to the nonholonomic system (Fig. 2.3)
which was studied previously in Example 2.3 on page 83. The configuration of a dumbbell
that moves in the horizontal xy-plane is given by the generalized coordinates (x, y,φ).
There is a knife-edge constraint at particle 1 which has the Cartesian coordinates (x, y),
and the relative position of particle 2 with respect to particle 1 is given by the angle φ.
The nonholonomic constraint equation is
−
˙
x sin φ +
˙
y cos φ = 0 (2.294)
which states that the velocity of particle 1 is limited to the longitudinal direction. Hence,
the virtual velocity components must satisfy
−sinφδw
1
+ cos φδw
2
= 0 (2.295)
where δw
1
≡ δ
˙
x and δw
2
≡ δ
˙
y. The kinetic energy of the unconstrained system is
T = m
˙
x
2
+
˙
y
2
+
1
2
l
2
˙
φ
2
−l
˙
x
˙
φ sin φ + l
˙
y
˙
φ cos φ
(2.296)
117 Impulse response, analytical methods
and we obtain
d
dt
∂T
∂
˙
x
−
∂T
∂x
= m(2
¨
x −l
¨
φ sin φ − l
˙
φ
2
cos φ) (2.297)
d
dt
∂T
∂
˙
y
−
∂T
∂y
= m(2
¨
y +l
¨
φ cos φ − l
˙
φ
2
sin φ) (2.298)
d
dt
∂T
∂
˙
φ
−
∂T
∂φ
= ml(−
¨
x sin φ +
¨
y cos φ + l
¨
φ) (2.299)
In this example, n = 3 and m = 1 so there are two independent sets of δws which satisfy
(2.295). We can choose
δw = (cos φ,sin φ,0) (2.300)
and
δw = (0, 0, 1) (2.301)
Notice that these components of δw are not necessarily infinitesimal.
Using Jourdain’s principle and the first set of δws, we obtain
m(2
¨
x cos φ + 2
¨
y sin φ − l
˙
φ
2
) = 0 (2.302)
which is the first equation of motion. The second equation of motion is obtained by using
the second set of δws, resulting in
ml(−
¨
x sin φ +
¨
y cos φ + l
¨
φ) = 0 (2.303)
These differential equations of motion are the same as those obtained by first using
the nonholonomic Lagrange equations with Lagrange multipliers, and then algebraically
eliminating the λs. However, the use of Jourdain’s principle appears to be more direct.
In addition to the two equations of motion, (2.302) and (2.303), a third equation is obtained
by differentiating the constraint equation with respect to time, with the result
−
¨
x sin φ +
¨
y cos φ −
˙
x
˙
φ cos φ −
˙
y
˙
φ sin φ = 0 (2.304)
These three equations are sufficient to solve for x (t ), y(t), and φ(t).
2.6 Impulse response, analytical methods
In the previous discussion of impulse methods in Chapter 1, Newton’s law and vectorial
methods were used. In this chapter we will use the analytical methods of Hamilton and
Lagrange, and will pay particular attention to constrained systems.
Hamiltonian approach
Consider an unconstrained system whose dynamical equation of motion has the Hamiltonian
form
˙
p
i
=−
∂ H
∂q
i
+ Q
i
(i = 1,...,n) (2.305)

118 Lagrange’s and Hamilton’s equations
where Q
i
is the ith generalized applied force which is not derived from the potential energy
portion of the Hamiltonian function.
Now let us assume that very large forces are applied to the system over an infinitesimal
time interval t, beginning at time t
1
. Let us integrate (2.305) over the interval t .We
obtain
t
1
+t
t
1
˙
p
i
+
∂ H
∂q
i
dt =
t
1
+t
t
1
Q
i
dt (i = 1,...,n) (2.306)
The term ∂ H/∂q
i
remains finite during the impulse, so its integral can be neglected. Thus
we obtain
p
i
=
ˆ
Q
i
(i = 1,...,n) (2.307)
for this unconstrained system. The generalized impulse is
ˆ
Q
i
=
t
1
+t
t
1
Q
i
dt (i = 1,...,n) (2.308)
and
p
i
=
t
1
+t
t
1
˙
p
i
dt =
n
j=1
m
ij
˙
q
j
(i = 1,...,n) (2.309)
where we assume that the qs are fixed during the impulse. Thus, the
˙
qs can be obtained
by solving
n
j=1
m
ij
˙
q
j
=
ˆ
Q
i
(i = 1,...,n) (2.310)
as we found earlier in (1.360).
Now consider an unconstrained system of N particles whose positions are given by
the Cartesian coordinates x
1
,...x
3N
. Suppose that corresponding impulses
ˆ
F
1
,...,
ˆ
F
3N
are applied to the system during the infinitesimal interval t. The generalized impulse
associated with q
i
is
ˆ
Q
i
=
3N
k=1
∂x
k
∂q
i
ˆ
F
k
=
N
j=1
ˆ
F
j
· γ
ji
(2.311)
in agreement with (1.359).
Lagrangian approach
Let us begin with the fundamental form of Lagrange’s equation, namely,
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
= Q
i
(i = 1,...,n) (2.312)