Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. Часть II
Подождите немного. Документ загружается.


МИНИСТЕРСТВО ОБОРОНЫ РОССИЙСКОЙ ФЕДЕРАЦИИ
А.М. ГОЛИК
МНОГОКАНАЛЬНЫЕ
РАДИОЛОКАЦИОННЫЕ СТАНЦИИ
РАЗВЕДКИ ОГНЕВЫХ ПОЗИЦИЙ
Часть II
1997
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
1.
ОСОБЕННОСТИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ПОЛЕВОЙ АРТИЛЛЕРИИ
В настоящее время на вооружении подразделений артиллерийской инструментальной
разведки в армиях многих стран НАТО, а также других развитых государств состоят РЛС полевой
артиллерии американского или английского производства, обеспечивающие главным образом
определение координат огневых позиций стреляющих орудий и минометов.
Принцип действия всех существующих РЛС полевой артиллерии заключается в засечке
летящей мины (артиллерийского снаряда) в нескольких точках на траектории полета и опреде-
лении точки ее вылета на основе расчета траектории методом экстраполяции. Основные такти-
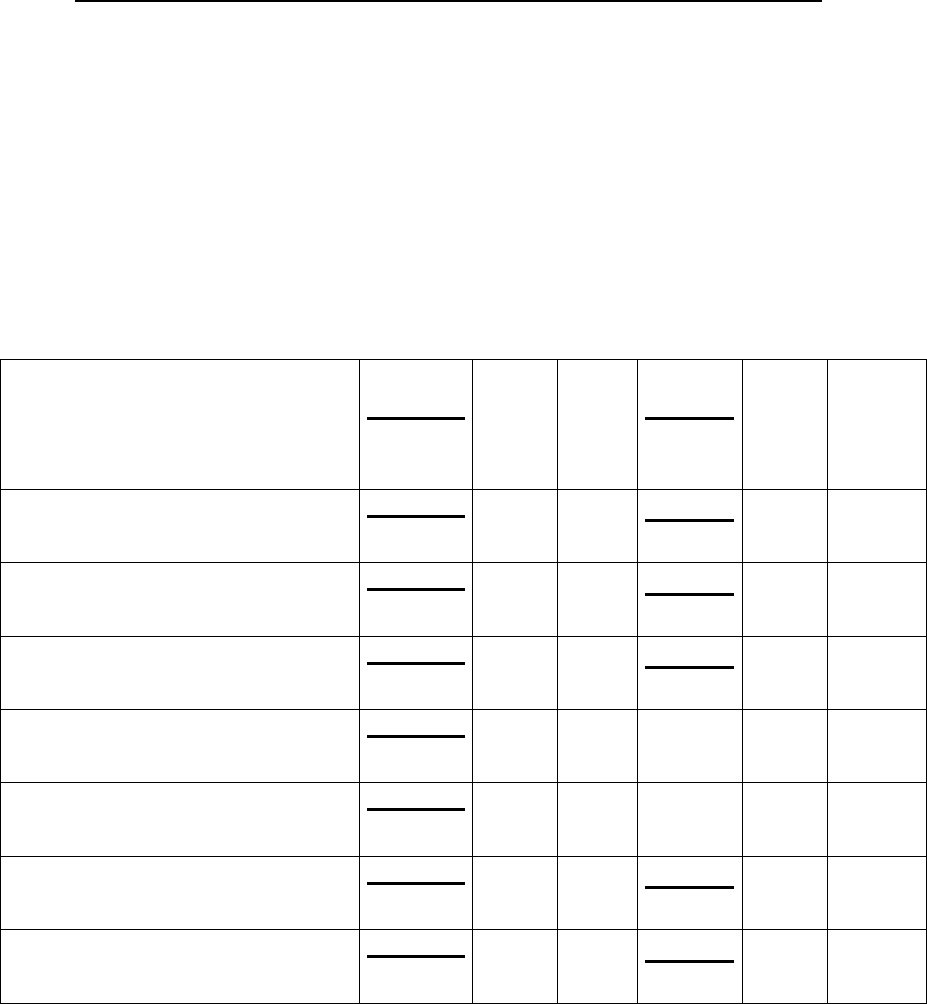
ко-техни-ческие характеристики РЛС полевой артиллерии приведены в табл. 1 [1 - 3].
Наименование (в каких странах
принята на вооружение)
Дальность
действия,
км
Сектор
обзора,
град
К
руговая
ошибка
опреде-
л
ения
коорди-
нат, м
Время
опре-
деле-
ния
коор-
динат
ОП, с
Рабочая
частота,
МГц
Импульс-
ная мощ-
ность, кВт
Общий
вес,
т
Тип
антенны
АN/MPQ-10 (США, Бельгия, Ни-
дерланды, Япония)
18
11 — 15
5
0 —
2700-2860
200
2
Зеркальная
АN/MPQ-4А (США, Италия, Тур-
ция, ФРГ, Япония)
10
25
5
0 30
1800
50
4,6
Зеркальная
АN/ТPQ-31 (США)
24
360
1
15 —
1250-1350
1000
1,5
Зеркальная
АN/ ТPQ-36 (США)
90
—
1–2
2
ФАР
АN/ ТPQ-37 (США)
50
90
—
1–2
ФАР
FА N8 Mk 1 (Великобритания,
Дания, Израиль, Италия, ФРГ,
Швеция, Швейцария)
17
40
5
0 15–30
10000
100
3
Зеркальная
FА N15 Mk 1 (Великобритания,
ФРГ)
20
40
5
0 15–20
10000
100
0,4
Зеркальная
В середине 80-х годов фирмой Toshiba разработана РЛС полевой артиллерии J/ МРQ-P7,
в которой использованы многие технические решения, воплощенные РЛС АN/ТРQ -36 и АN/TPQ -
37. В 1986 году было принято решение о создании силами Великобритании, ФРГ и Франции новой
РЛС контрбатарейной борьбы COBRA (Couпter Вattery Radar), в качестве антенной системы в ко-
торой используется проходная ФАР модульной конструкции.
Наибольший интерес представляют многоканальные РЛС АN-ТPQ -36 и АN/TPQ-З7, так
как конструкции их антенн (волноводно-щелевая ФАР и ФАР, состоящая из модулей с микрополос-
ковыми излучателями соответственно) являются наиболее типичными для современных и пер-
спективных РЛС с ФАР. Эти РЛС используются в системе "Fire fiпder'', разработанной в США для
автоматического определения координат артиллерийских позиций противника по первому вы-
стрелу. Система предназначена для засечки позиций большого числа одновременно стреляющих
орудий. Станции имеют одинаковую структуру и одинаковые кабины операторов. Жесткие требо-
вания к скорости обработки информации при поиске и сопровождении большого числа целей, од-
новременно находящихся в воздухе, привели к необходимости использования антенн с электрон-
ным сканированием луча. Антенна каждой из РЛС способна быстро направить луч в любую точку
90 градусного сектора обзора по дирекционному углу, оставаясь при этом неподвижной.
Обе РЛС могут работать в климатических условиях любой точки Земли при различной тем-
пературе (от -45
о
С до +52
о
С), различной влажности, при большой интенсивности помех естествен-
ного и искусственного происхождения [1, 2].
Особенности конструкции РЛС AN/ТРQ-З7
Многоканальная РЛС AN/ТPQ-З7 размещается на двух автомобилях и прицепе. Антенна,
передатчик и приемник РЛС расположены на прицепе, имеющем вес 4,7 • 10
3
кг.
Для перемещения луча ФАР по дирекционному углу и по углу места используется фазо-
вое сканирование при помощи p-i-n-диодных фазовращателей. Система управления лучом обес-
печивает перемещение ДН ФАР в секторе 90
о
по азимуту и нескольких градусов по углу места.
Для решения задачи определения координат достаточно такого неб0льшого сектора сканирова-
ния по углу места. Благодаря этому количество фазовращателей в столбцах ФАР удалось значи-
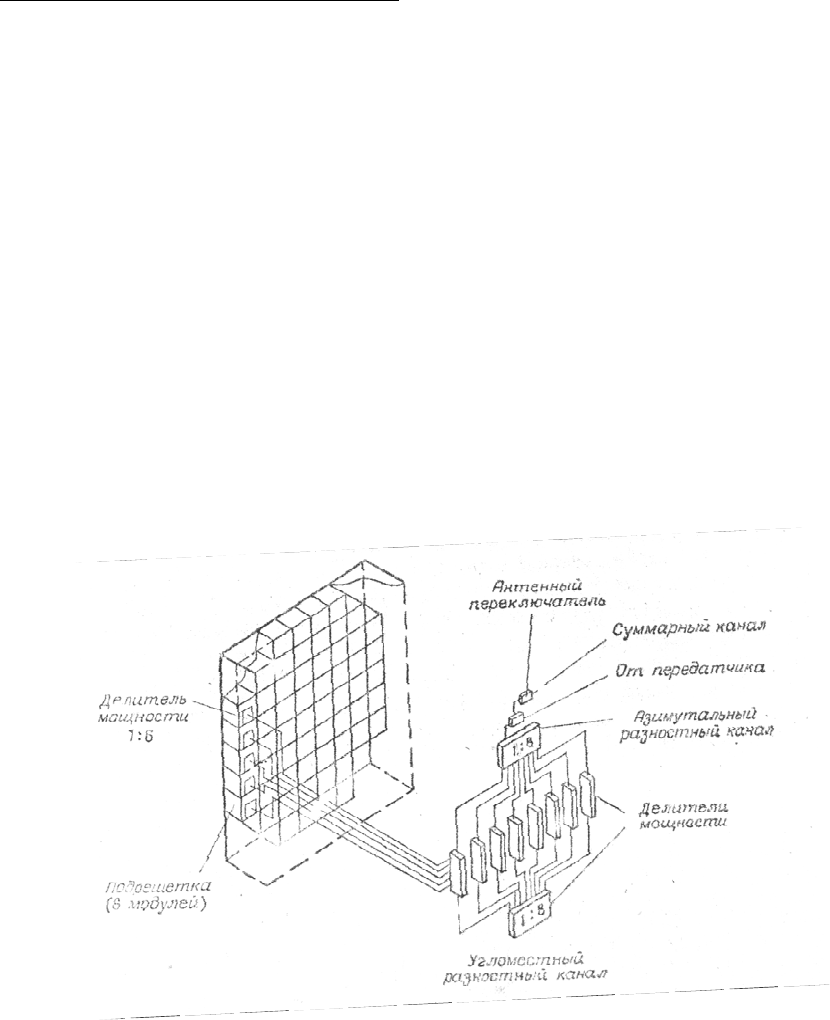
тельно уменьшить. Это достигается тем, что один фазовращатель управляет вертикальным мо-
дулем, содержащим шесть излучающих элементов. Конструктивно фазовращатель размещается
на одной плате с излучателями. В каждом модуле кроме фазовращателя и шести дипольных из-
лучающих элементов имеется полосковый делитель мощности 1:6. В состав каждой из 60 подре-
шеток ФАР входит 6 таких модулей (рис.1). Расчет команд управления осуществляется с помо-
щью специального вычислителя (вычислителя фаз).
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Рис
. 1
Антенно-волноводная система РЛС, главным элементом которой является ФАР с фи-
дерным возбуждением, собрана по моноимпульсной схеме (см. рис. 1) и представляет собой
сложную систему волноводных и микрополосковых делителей мощности (2:5, 2:7, 2:9 и1:8), а
также антенного переключателя. Для измерения мгновенных значений отклонения полотна ан-
тенны от заданного положения используются I4-разрядные датчики. Информация от датчиков
автоматически передается в компьютер и используется при расчетах.
В передающей системе РЛС используется твердотельный задающий генератор, а око-
нечный каскад усилителя мощности выполнен на лампе бегущей волны (ЛБВ).
В каждом положении луча передатчик излучает последовательность импульсов с постоян-
ной частотой следования. Каждый импульс представляет собой СВЧ-сигнал с нелинейной частот-
ной модуляцией.
В передающей системе РЛС использовано жидкостное охлаждение антенного переклю-
чателя и эквивалента антенны.
Приемник РЛС имеет три канала (суммарный ∑ и два разностных Δα и Δε). Для калибров-
ки каналов приемника по фазе и амплитуде используются дополнительные импульсы (пилот-
сиrналы), которые не излучаются в пространство. Для расширения динамического диапазона при-
емных каналов и термостабилизации используется управляемая компьютером автоматическая
регулировка усиления.
После преобразования принятых сигналов на промежуточную частоту (ПЧ) сигналы от трех
каналов приемника, благодаря вносимому временному разделению между ними (с помощью линий
задержки на поверхностных акустических волнах) последовательно передаются на систему пер-
вичной обработки сигналов, располагающуюся в кабине операторов.
С целью унификации в обеих РЛС кабины операторов, где размещена аппаратура обра-
ботки сигналов, компьютер, индикаторные системы, а также средства связи имеют одинаковую
конструкцию.
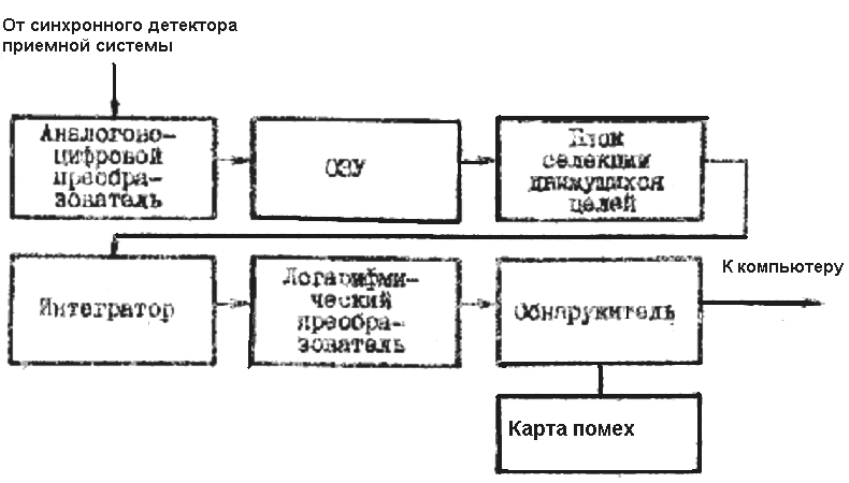
Структурная схема системы первичной обработки сигналов приведена на рис. 2.
Рис. 2
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Сигналы приемника поступают на вход 11-разрядного аналогово-цифрового преобразова-
теля. Далее оцифрованный сигнал поступает на блок селекции движущихся целей (СДЦ).
Селекция движущихся целей реализована с использованием быстрого преобразования
Фурье (БПФ) [4]. Алгоритмы БПФ, используемые блоками СДЦ в РЛС АN/ТРQ-З7 и АN/ТPQ-З6,
различаются количеством точек преобразования Фурье.
Для обнаружения целей реализуется метод, использующий стабилизацию уровня ложных
тревог. Для этого сигналы с логарифмического преобразователя поступают на устройство опреде-
ления среднего уровня сигналов. Этот средний уровень используется для определения порога об-
наружения, который устанавливается в обнаружителе с помощью компьютера.
Карта помех используется для запоминания пространственного· расположения и диапазо-
на изменения частоты Доплера медленно движущихся источников пассивных помех· (облака, са-
молеты, птицы и т.п.).
Оперативное запоминающее устройство предназначено для хранения большого числа от-
счетов амплитуд сигналов в элементах разрешения по дальности и скорости для различных угло-
вых положений луча антенны. Аналогичным образом хранится цифровая карта помех.
Устанавливаемый в РЛС компьютер — AN/UYК-I5 изготовлен фирмой Sperry Univac на ос-
нове компьютера общего назначения модели 3637А. Компьютер имеет быстродействие 750 тыс.
операций в секунду [ 5 ]. На него возложены следующие задачи:
управление этапами функционирования РЛС;
вторичная обработка сигналов;
экстраполяция траекторий ОН к точке вылета (падения);
определение высоты расположения ОП;
подготовка и выдача данных на цифровое табло, индикатор ДАЛЬНОСТЬ-А3ИМУТ, план-
шет, печатающее устройство, а также на аппаратуру передачи данных (AПД);
управление контролем функционирования РЛС и поиском неисправностей;
обучение операторов РЛС с помощью учебно-имитационных программ [2, 6].
Компьютер имеет ОЗУ емкостью 32 тысячи шестнадцатиразрядных слов. Еще 32 К слова
используется для размещения информации о местности. Цифровая карта местности, служащая
для автоматического определения высоты ОП, хранится на магнитной ленте и при необходимости
часть ее (район расположения ОП) записывается в ОЗУ компьютера. На магнитной ленте также
хранятся рабочие и проверочные программы компьютера.
Обнаруженные ОП отмечаются светящейся точкой на карте масштаба I:50 000, закреплен-
ной на прозрачном вращающемся барабане (планшете). Одновременно с этим на цифровом табло
светодиоды высвечивают координаты ОП и другую текущую информацию.
Процесс функционирования РЛС осуществляется автоматически. Однако для контроля за
процессами поиска и сопровождения ОН на рабочем месте оператора имеется индикатор ДАЛЬ-
НОСТЬ-АЗИМУТ.
Для питания РЛС, включая и кабину оператора, используется агрегат мощностью 45 кВт
[2].
Особенности конструкции РЛС АN/ТРQ-З6
Передатчик. приемник и антенна AN/ТРQ-З6 размещены на одноосном прицепе. На том же
прицепе размещается турбинный генератор для питания РЛС, мощностью 10 кВт. Полный вес
прицепа составляет 1,4 т.
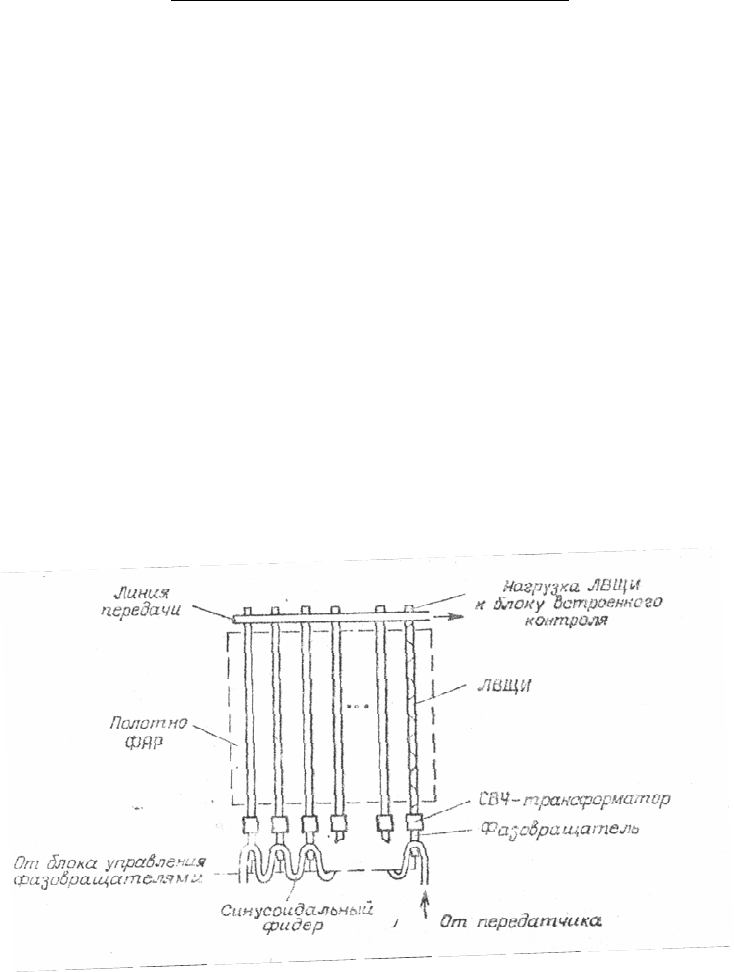
В волноводно-щелевой антенной решетке РЛС (рис. З) для распределения мощности по
элементам (в азимутальной плоскости) используется последовательное питание. Для сканирова-
ния луча по азимуту запитка вертикально расположенных линеек волноводно-щелевых излучате-
лей осуществляется через ферритовые фазовращатели взаимного типа. Частотная зависимость
характеристик волноводно-щелевых линеек излучателей используется для электронного скани-
рования луча по углу места путем изменения рабочей длины волны. Для точного измерения углов
при сопровождении целей используется последовательное формирование двух пар лучей (по
азимуту и по углу места).
Передающая система РЛС имеет два каскада усиления на ЛБВ. Передатчик, как и вся ос-
тальная аппаратура РЛС, имеет воздушное охлаждение.
Рис.3
Приемная система имеет предусилитель на арсенид-галлиевых полевых транзисторах.
Принятые антенной сигналы после предварительного усиления преобразуются на промежуточную
частоту и передаются по кабелю в кабину операторов.
Все размещаемое на прицепе оборудование располагается вместе с антенной на вра-
щающемся основании. На поворотной платформе антенны установлены: датчик углов поворота, а
также датчик углов наклона антенны в двух взаимно перпендикулярных плоскостях. Данные от
датчиков поступают на компьютер.
В РЛС AN/TPQ-36 используется тот же компьютер AN/UYK-15.
Ориентация антенны производится так же, как и в AN/TPQ-37 — с помощью специального
оптического устройства.
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997

Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Эксплуатационные качества РЛС AN/TPQ-36 и AN/TPQ-37
При разработке РЛС к ним были предъявлены требования по обеспечению высоких экс-
плуатационных качеств, высокой надежности и низкой стоимости производства. Более 90 % всех
ремонтно-восстановительных работ может быть выполнено в поле одним ремонтником, который
обычно включается в состав расчета станции. Среднее время восстановления работоспособности
станции составляет менее 30 минут. В обеих РЛС есть аппаратура встроенного контроля (АВК),
которая обеспечивает проверку работоспособности РЛС при помощи компьютера.
В большинстве случаев диагностическая аппаратура локализует неисправность вплоть до
сменного модуля.
Наличие в РЛС устройств встроенного контроля интегральных характеристик ФАР, а также
средств, обеспечивающих компенсацию погрешностей реализации заданного амплитудно-
фазового распределения на раскрыве ФАР, позволяет снизить влияние дестабилизирующих фак-
торов на ее характеристики [7].
Совершенствование характеристик рассмотренных РЛС полевой артиллерии идет в на-
стоящее время по пути повышения излучаемой мощности (в последних модификациях AN/TРQ-36
этот параметр увеличен в 1,3 -1,5 раза), повышения помехозащищенности за счет использования
частично адаптивных методов (т.е. установка дополнительных фрагментов по углам ФАР, предна-
значенных для формирования провалов в ДН в помеховых направлениях), а также повышения бы-
стродействия устанавливаемого в РЛС компьютера.
2. COВЕРШЕНСТВОВАНИЕ ХАРАКТЕРИСТИК МНОГОКАНАЛЬНЫХ PЛС
Совершенствование характеристик мобильных PЛС (в том числе и многоканальных ) идет
по пути снижения габаритов и веса аппаратуры, напрямую связанного с совершенствованием ис-
пользуемой в ней элементной базы. Однако для многоканальных РЛС свойственны направления
совершенствования, обусловленные их принципиальным отличием от традиционных РЛС — не-
механическим(электронным) управлением диаграммой направленности антенны.
Рассмотренные варианты построения МРЛС еще далеко не полностью используют потен-
циальные возможности безинерционногo управления лучом, так как они являются первыми образ-
цами многоканальных РЛС, решающих задачи в интересах артиллерии.
Применение ФАР в радиолокации не только позволяет, но и требует применения гибких
процедур поиска ОН, обнаружения сигналов и траекторий, так как они позволяют наиболее пoлно
использовать потенциальные возможности ФАР по повышению пропускной способности РЛС и тем
самым оправдать связанные с применением ФАР существенные экономические затраты.
Необходимость и сущность адаптации МРЛС к условиям функционирования
Использование антенных систем с электронным управлением лучом позволило значи-
тельно расширить возможности радиоэлектронных средств разведки. Именно благодаря исполь-
зованию ФАР появились многоканальные радиоэлектронные средства (в том числе и с временным
разделением каналов), способные одновременно обслуживать большое число ОН. Однако при
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
этом значительно возрастает объем информации, поступающей на пульт оператора. Управление
функционированием многоканальных радиолокационных систем разведки в ходе эксплуатации
представляет сложную задачу и требует от оператора принятия решений в довольно короткие
промежутки времени, порой значительно превышающие человеческие возможности. С другой сто-
роны, используемые в настоящее время алгоритмы управления процессом функционирования
РЛС обладают наибольшей эффективностью лишь при определенных условиях, определяемых
типом ОН и порядком размещения огневых средств на ОП. радиолокационной прозрачностью сре-
ды, дальностью до объекта, наличием у противника пассивных и активных средств защиты от ра-
диоэлектронных средств (РЭС) и т.д., т.е. возникает необходимость выбора алгоритмов управле-
ния, соответствующих условиям функционирования.
Возросшее количество РЭС различного назначения, состоящих на вооружении противо-
борствующих сторон, а также совершенствование средств и способов радиоэлектронной борьбы
значительно повышают требования к помехозащищенности. Традиционные методы селекции дви-
жущихся целей обеспечивают защиту РЭС только от пассивных помех, причем их возможности по
улучшению отношения сигнал/помеха не всегда удовлетворяют требованиям практики. Возможно-
сти по защите РЛС путем перестройки рабочей частоты также ограничены ввиду того, что ширина
спектра помехи может существенно превышать диапазон возможной перестройки.
Возможности безинерционного управления лучом на основе использования соответствую-
щих конкретной ситуации зондирующих сигналов. уровней излучаемой мощности, а также спосо-
бов обработки данных позволяют обеспечить получение полезной информации в условиях помех
с наименьшей средней энергией, затраченной на один элемент разрешения [8].
Дополнительные возможности по обеспечение помехоустойчивости РЛС в сложной, ме-
няющейся во времени помеховой обстановке, когда на нее могут воздействовать с разных направ-
лений одновременно несколько подвижных источников помех, открывает адаптивное управление
диаграммой направленности ФАР: в условиях конкретной помеховой обстановки и при конкретном
угловом положении луча антенны ее ДН в режиме приема автоматически, под воздействием при-
ходящих помех, видоизменяется таким образом чтобы обеспечить максимально возможное отно-
шение сигнал/помеха на выходе приемника РЛС. Для этого в ДН антенной решетки в направлени-
ях на источники помех формируются глубокие провалы ("нули"). Такая ФАР осуществляет
пространственно-временную фильтрацию сигналов и помех путем изменения формы ДН во
времени в соответствии с
изменениями положения ОН и источника помех. . ,
Антенные системы рассмотренных PЛС представляют собой довольно сложные техниче-
ские устройства, состоящие из большого числа элементов. Особенностью ФAP, используемой в
качестве антенной системы многоканальной РЛС разведки огневых позиций (РОП), является на-
личие большого числа факторов, оказывающих влияние на техническое состояние ее элементов,
вызывая тем самым неопределенность ее параметров в процессе эксплуатации.
Техническое состояние элементов ФАР определяет точность реализации заданного ам-
плитудно-фазовогo распределения на ее раскрыве, от которого, в свою очередь, зависят такие
интегpaльные характеристики РЛС, как точность установки луча, ширина ДН, уровень боковых ле-
пестков, коэффициент усиления.
Условно, факторы, влияющие на точность реализации АФР, можно разбить на три груп-
пы.
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
K первой группе относятся факторы, обусловленные выбранным типом управления пара-
метрами ФАР:
дискретный характер управления лучом;
изменения частоты излучения.
Вторую группу составляют факторы, связанные с конструкцией каналов управления ФАР,
типом излучателей, а также используемым видом возбуждения:
производственный разброс характеристик фазовращателей;
взаимное влияние излучателей;
сферичность фазового фронта первичной волны (для ФАР с пространственным возбу-
ждением);
неидентичность фидеров (для ФАР с фидерным возбуждением).
K третьей группе относятся факторы, вызванные внешними условиями функционирова-
ния ФАР:
температурная зависимость параметров;
изменения геометрии ФАР;
отказы элементов;
механические повреждения элементов (в том числе по причине поражения их осколка-
ми артиллерийских боеприпасов).
Необходимо отметить, что техническое состояние элементов ФАР оказывает значительное
влияние на качество этапов обнаружения траектории и сопровождения ОН, так как снижение точ-
ности измерений приводит к пропускам ОН и срывам этапов функционирования РЛС.
Непрерывное поддержание электродинамических характеристик антенных систем МРЛС в
процессе эксплуатации при ужесточении требований к точности управления амплитудно-фазовым
распределением, с одной стороны, и воздействие целого ряда дестабилизирующих факторов, с
другой — требуют адаптации управления АФР на раскрыве ФАР к ее техническому состоянию.
Таким образом, возникает необходимость адаптации управления характеристиками
МРЛС к условиям функционирования, которые можно условно разделить на следующие компонен-
ты:
целевая обстановка (количество ОН в заданном секторе обзора, координаты и паpаметры
траектории каждого из них, а также количество ОН в объеме разрешения по каждому из информа-
ционных каналов МРЛС);
помеховая обстановка (количество помех, их координаты, энергетические и частотные ха-
рактеристики);
техническое состояние МРЛС, а также климатические условия окружающей среды (темпе-
ратура, влажность, атмосферное давление, ветровые нагрузки); .
характер местности и связанные с ним источники погрешностей приема сигнала и опреде-
ления экстраполированных координат ОН.
Для получения информации об условиях функционирования сиcтeма управления характе-
ристиками МРЛС должна обладать функциями распознавания образов. С этой целью используют-
ся так называемые распознаватели, под которыми подразумеваются устройства, реагирующие на
изменения окружающей обстановки через различные датчики и позволяющие решать задачи рас-
познавания образов. В ходе распознавания система управления осуществляет построение модели
условий и процесса функционирования PЛC и, сравнивая ее параметры с имеющимися в памяти
эталонами, принимает решение, к какому виду относится результат сравнения. В процессе экс-
плуатации МРЛС эта модель постоянно уточняется (обновляется).
В соответствии с условиями функционирования система управления МРЛС осуществляет
выбор алгоритма управления ее характеристиками. При этом алгоритмы управления оцениваются
в соответствии с критериями, выбор которых также проводится на основе идентификации условий
функционирования МРЛС. Разработка таких критериев представляет собой самостоятельную за-
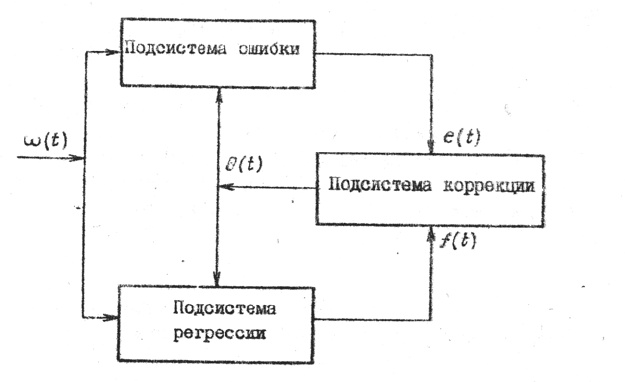
дачу. Система управления характеристиками МРЛС, осуществляющая синтез оптимального
управления объектом с неизвестными параметрами по заданным критериям оптимальности, явля-
ется адаптивной и может быть представлена вида трех независимых подсистем: подсистемы рег-
рессии, посистемы ошибки, подсистемы коррекции (р
ис.
4).
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Рис.4.
Обозначим векторную величину, описывающую состояние объекта, как вектор сигнала f
(t). В этом случае адаптивная оценка параметра МРЛС, т. е. восстановление неизвестной харак-
теристики объекта, описываемой конечномерным вектором
Θ, состоит в том, что на основе f (t),
сигнала коррекции параметра за прошлое время
Θ(t) и сигнала ошибки е(t) корректируется и зано-
во вычисляется оценка параметра.
Совокупность внешних сигналов, включающую управляющие воздействия, возмущения и
шумы, определяемую окружающей обстановкой, обозначим через ω(t).
Подсистема регрессии, на вход которой поступают сигналы ω(t) и
Θ(t), а на выходе обра-
зуется сигнал f (t), описывается оператором
f (t) = H
fw
(Θ) ω. (1)
Подсистема ошибки, на вход которой постyпaют сигналы ω(t), f (t) и
Θ(t), а на выходе об-
разуется сигнал ошибки е(t) для адaптивной коррекции, описывaется оператором
e = H
ew
(Θ) ω, (2)
В подсистеме коррекции сигналы e и f используются для получения сигнала коррекции
параметра Θ. Алгоритм коррекции записывается как