Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. Часть II
Подождите немного. Документ загружается.

Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
оорди-задание положения и размеров стробов сопровождения по дальности, угловым к
натам и частоте Доплера;
задание вычислителю фаз требуемого положения луча для очередного зондирования.
Все перечисленные функции базируются на анализе множества параметров МРЛС, опти-
мального (квазиоптимального) выбора алгоритмов управления ее характеристиками и реализу-
ются путем передачи команд исполнительным органам МРЛС: вычислителю фаз (блоку управ-
ления АФР), передатчику, приемнику, устройствам обработки и отображения информации.
При работе системы управления и обработки данных приходится учитывать и обеспечи-
вать соответствующими способами выполнение требований временного баланса МРЛС, энергети-
ческого баланса передающей системы и баланса объема производимых ЦВУ вычислений [16].
Временной баланс обеспечивается путем выбора заявок на обслуживание в соответствии
с принятой системой приоритетов.
Энергетические возможности передатчика определяются, как правило, высоковольтным
источником питания и усилителем (или генератором). При генерации серии зондирующих им-
пульсов напряжение на выходе источника питания понижается, а усилитель передающего устрой-
ства нагревается. В простейшем случае временной баланс передатчика обеспечивается аппара-
турным способом путем ограничения частоты следования зондирующих импульсов.
С целью повышения эффективности МРЛС осуществляется адаптивное управление пе-
риодом следования и длительностью, а иногда (если это позволяет конструкция передатчика) и
мощностью зондирующих импульсов. Поэтому при выборе требований на обслуживание необхо-
димо постоянно контролировать соблюдение энергетического баланса.
Правило соблюдения энергетического баланса можно сформулировать следующим обра-
зом. Суммарная энергия, вырабатываемая передатчиком на заданном интервале времени не
должна превышать допустимых значений. При неизменной мощности генерируемых передатчиком
импульсов энергетический баланс может контролироваться с помощью среднего коэффициента
заполнения, определяемого как отношение суммы длительностей импульсов, излучаемых на за-
данном интервале времени, к длительности этого интервала. Если средний коэффициент запол-
нения превышает допустимое значение, то планируется пауза, во время которой передатчик не
работает.
Загрузка ЦВУ во времени неравномерна. Это объясняется тем, что даже создающийся в
результате первичной обработки данных потока ОН, стационарный поток заявок имеет некото-
рые локальные уплотнения. Кроме того, этап сопровождения ОН требует большего объема обра-
ботки данных, чем этап поиска. Особенно велика вероятность перегрузки ЦВУ при сопровождении
ОН на малых дальностях, так как при этом поступает самый большой объем данных в единицу
времени. Поэтому в процессе отбора заявок на обслуживание осуществляется контроль баланса
планируемого для ЦВУ объема вычислений. При этом пользуются следующим правилом: количе-
ство планируемых циклов измерения координат ОН на траектории не должно превышать допусти-
мого значения.
Все перечисленные выше задачи, направленные на обеспечение устойчивости функцио-
нирования МРЛС в условиях воздействия внутренних и внешних дестабилизирующих факторов,
должны решаться без прекращения выполнения МРЛС ее основных функций, т.е. в реальном вре-
мени. Наибольшую оперативность в решении задач идентификации окружающей ситуации и вы-
бора алгоритма адаптивного управления характеристиками МРЛС позволяет получить использо-
вание систем искусственного интеллекта (ИИ) — экспертных систем [12, 27,28].

Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Интеллектуализация МРЛС позволяет на основе ее штатных средств осуществить иден-
тификацию сигнально-помеховой обстановки и технического состояния ее элементов, а затем, ис-
пользуя эту информацию выбрать критерий оптимизации и реализовать соответствующий ему
алгоритм управления. Система ИИ должна информировать оператора о снижении характеристик
МРЛС (в случаях , если их не удается полностью восстановить), а также о вышедших из строя
элементах. Так как современные МPЛС, как правило, имеют в своем составе компьютеры, техни-
ческие аспекты их интеллектуализации не вызовут больших осложнений.
Архитектура интеллектуальной МРЛС
i
В течении последнего десятилетия в рамках исследований по искусственному интеллек-
ту сформировалось самостоятельное направление - экспертные системы (ЭС) или инженерия
знаний. В задачу этого направления входят исследование и разработка программ, использующих
знания и процедуры вывода для решения задач, являющихся трудными для людей-экспертов. Та-
кие программы имитируют те интеллектуальные функции человека, которые позволяют ему осу-
ществлять решения конкретных задач в данной предметной области [27]. При этом, системы, ос-
нованные на знаниях, имеют определенные преимущества перед человеком - экспертом:
у них нет предубеждений;
они не делают т.н. "поспешных выводов", т.к. работают систематизировано, рассматривая
все детали, выбирая наилучшую альтернативу из всех возможных;
объем знаний, содержащихся в ЭС, определяется предметной областью, в которой она
функционирует, однако ни один из элементов этого объема не может быть "забыт";
системы, основанные на знаниях, устойчивы к различного рода помехам.
Эксперт пользуется побочными знаниями (не связанными с данной предметной областью)
и легко поддается влиянию внешних факторов, которые непосредственно не связаны с решаемой
задачей. Экспертные же системы не обременены знаниями из других областей и по своей природе
менее подвержены внешним воздействиям.
Экспертные системы способны получать, накапливать, корректировать знания из некото-
рой предметной области, выводить новые знания (т.е. обучаться и самообучаться), решать на
основе этих знаний практические задачи и объяснять ход их решения.
Основные компоненты ЭС показаны на рис.13.
Б а з а з н а н и й хранит в себе информацию о предметной области (закономерности, а
также эвристические правила, формируемые на основе знаний эксперта).
В б а з е д а н н ы х (рабочая память) хранится множество фактов, описывающих текущую
ситуацию, а также описание решаемой задачи.
Подсистема логического вывода (м е х а н и з м в ы в о д а) осуществляет просмотр су-
ществ фактов из рабочей памяти и правил из базы знаний, добавление в рабочую память новых
фактов и определяет порядок просмотра и применения правил. Этот механизм управляет процес-
сом консультации, сохраняя для пользователя информацию о полученных заключениях, запраши-
вает у него информацию в тех случаях , когда для срабатывания очередного правила в рабочей
памяти оказывается недостаточно данных. В подавляющем большинстве ЭС сеханизм вывода
представляет собой небольшую программу. Основную же часть памяти компьютера занимают
правила ( т.е. содержимое базы знаний).
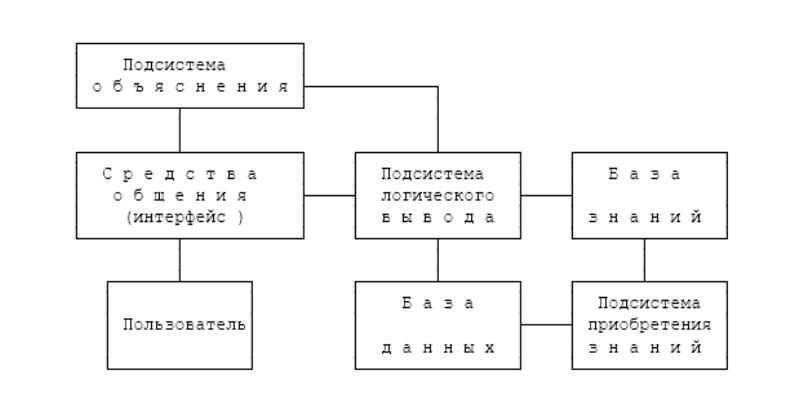
Подсистема п р и о б р е т е н и я з н а н и й предназначена для добавления в базу зна-
ний новых правил и модификации имеющихся. В ее задачу входит приведение правил к виду, по-
зволяющему механизму вывода применять это правило в процессе работы. Она может содержать
средства для проверки выводимых или модифицируемых правил на непротиворечивость с имею-
щимися правилами.
Рис.13
Для того, чтобы системой мог воспользоваться неподготовленный пользователь в нее мо-
гут включаться средства общения на естественном языке.
Большинство специалистов (пользователей) не смогут с доверием относиться к выведен-
ному системой заключению, пока не будут знать, как оно было получено. Компонент ЭС, который
отвечает на вопросы пользователя о том, как именно получено решение, называется подсистемой
объяснения. Во время проведения консультации эта подсистема должна быть способна в любой
момент привести обоснование принятого решения.
Экспертная система работает циклически. В каждом цикле правила из базы знаний про-
сматриваются интерпретатором правил в определенном (установленном) порядке. Если обнару-
живается правило, посылка которого при сопоставлении совпала с некоторыми фактами из рабо-
чей памяти, то правило срабатывает и его заключение добавляется в рабочую память. Затем цикл
повторяется.
Источником для наполнения базы знаний ЭС служат эксперты в той проблемной области,
задачи которой эта система будет решать. Эксперт определяет знания, характеризующие про-
блемную область, обеспечивает полноту и правильность их введения в ЭС. Выявить, структуриро-
вать и формализовать знания, необходимые для работы экспертной системы, ему помогает инже-
нер по знаниям.
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Применение экспертных систем имеет большую привлекательность из-за трудностей ис-
пользования человеческого интеллекта в системах управления, которые работают в темпе, зна-
чительно превышающем возможности человека по восприятию поступающего потока данных и
преобразованию их в необходимые действия. Созданная в 1984 году ЭС "Analist", которая осуще-
ствляет анализ поля боя и классификацию целей в реальном масштабе времени и, начиная с
1988 года, успешно используется в процессорах многоканальной наземной аппаратуры управле-
ния зенитных ракетных комплексов "Patriot" [29].
Интеллектуальный блок адаптивного управления характеристиками МРЛС, выполняющий
ранее описанные задачи должен содержать три концептуальных модуля:
модуль обработки сигнала;
модуль построения и идентификации моделей окружающей обстановки;
модуль управления.
Первый из модулей представляет собой совокупность устройств обработки сигналов,
принимаемых МРЛС. Модуль обеспечивает выделение характеристик и формирование данных
для построения моделей окружающей обстановки (модели условий функционирования). Второй
модуль осуществляет построение этих моделей и сравнивает их с моделями, занесенными в
библиотеку моделей объектов идентификации. Последний из модулей на основе правил, храня-
щихся в базе знаний, осуществляет управление работой модулей и принятие решений.
Реализация описанных функций системы вызывает необходимость представления этих
модулей в виде отдельных элементов - блоков более низкого уровня.
Интеллектуальная МРЛС, управление характеристиками которой осуществляет описанный
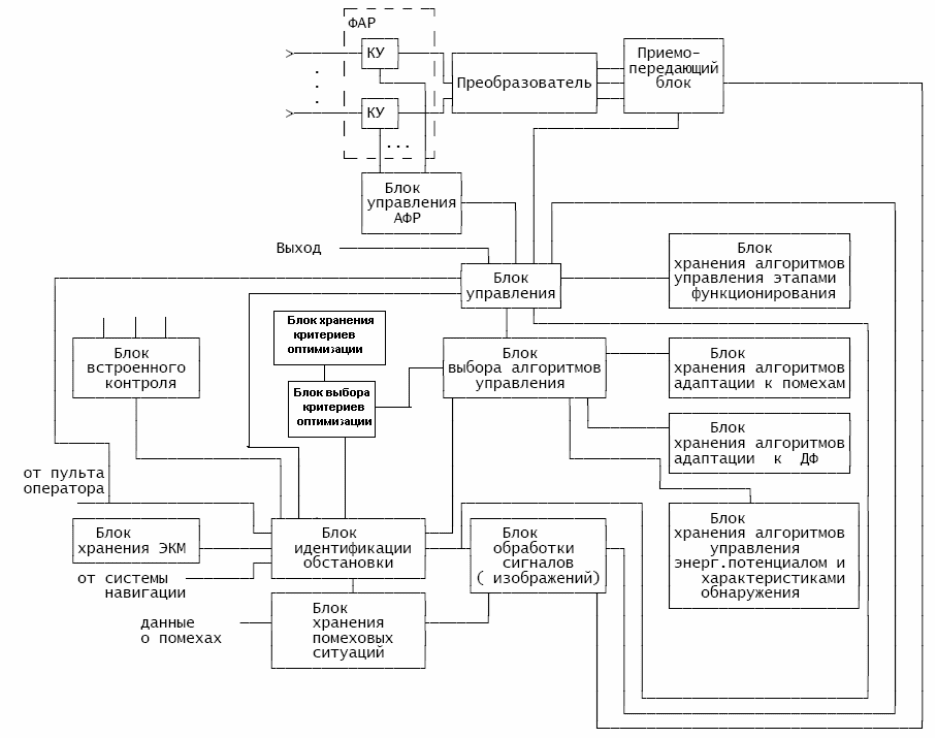
блок, может быть построена по схеме, показанной на рис. 14
Рис.14
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997

Архитектура интеллектуальной МРЛС, как система основных ее функциональных средств
(по определению [32]),содержит следующие основные блоки (рис.14): N-элементную ФАР 1, N
каналов управления, преобразователь, приемо-передающий блок, блок обработки сигналов, блок
выбора алгоритмов управления, блок управления, блок управления АФР, блок хранения крите-
риев оптимизации, блок выбора критериев оптимизации, блок хранения алгоритмов адаптации к
помехам, блок хранения помеховых ситуаций, блок идентификации обстановки, блок хранения
ЭКМ, блок встроенного контроля, блок хранения алгоритмов адаптации к дестабилизирующим
факторам, блок хранения алгоритмов управления энергетическим потенциалом и характеристи-
ками обнаружения.
В моноимпульсных МРЛС преобразователь реализует функцию выделения суммарного ∑
и двух разностных сигналов при работе на прием: по дирекционному углу Δα и углу места Δε. Эти
сигналы поступают на приемо-передающий блок по трем каналам: ∑ Δα и Δε.
Блок обработки сигналов представляет собой типовую цифровую систему первичной об-
работки информации, используемую в МРЛС [2]. На рис 15 представлен вариант построения тако-
го блока для МРЛС сопровождения ОН. Блок содержит: аналогово-цифровой преобразователь
(АЦП), блок селекции движущихся целей (СДЦ), счетчик дальности, интегратор, обнаружитель и
оперативное запоминающее устройство (0ЗУ).
Рис. 15
Тактовая частота АЦП, осуществляющего оцифровку сигналов, поступающих с выхода
приемо-передающего блока 4 , зависит от требуемой точности измерения параметров сигнала и, в
конечном счете, определяется требуемой точностью определения координат ОН.
Счетчик дальности может быть реализован по одной из цифровых схем, определяющих
номер дискрета дальности в момент появления цели на ее входе [4]. Величина дискрета опреде-
ляется требуемой точностью определения дальности и зависит от периода следования импульсов,
поступающих на тактовый вход счетчика дальности.
Сигналы от приемо-передающего блока МРЛС поступают на вход АЦП. Далее оцифро-
ванный сигнал поступает на блок СДЦ. Селекция движущихся целей может быть реализована с
использованием быстрого преобразования Фурье (БПФ) по одной из схем , приведенных в [4].
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Причем информация о сигналах, признанных блоком СДЦ помехами, вместе с кодами их коорди-
нат, поступающих от счетчика дальности и блока управления, передается в блок хранения поме-
ховых ситуаций.
Для обнаружения целей используется метод, использующий стабилизацию уровня лож-
ных тревог. Для этого сигналы с выхода блока СДЦ поступают на интегратор, служащий устрой-
ством для определения среднего уровня сигналов. Этот средний уровень используется для опре-
деления порога обнаружения, устанавливаемого в обнаружителе в отсутствии сигналов от блока
управления, которые блокируют сигналы от интегратора и устанавливают этот порог в соответст-
вии с выбранным блоком алгоритмом управления характеристиками обнаружения.
Оперативное запоминающее устройство предназначено для хранения определенного
числа отсчетов амплитуд сигналов в элементах разрешения по дальности и скорости для различ-
ных угловых положений луча антенны, т.е. для составления карты целевой обстановки. Коды угло-
вых положений луча поступают на ОЗУ от блока управления через обнаружитель в моменты при-
нятия им решений об обнаружении полезных сигналов.
Блок хранения помеховых ситуаций используется для запоминания пространственного
расположения, диапазона изменения частоты Доплера, а также энергетических характеристик
медленно движущихся источников пассивных помех (облака, самолеты, птицы и т.п.).
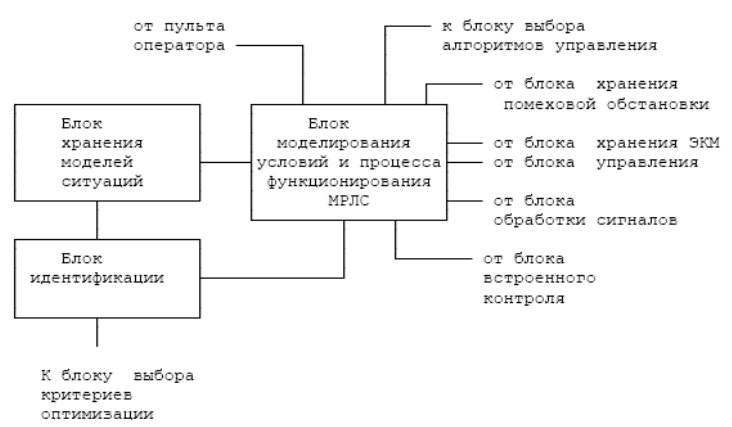
Блок идентификации обстановки (рис.16) представляет собой вычислительное устройст-
во, которое осуществляет математическое моделирование функционирования МРЛС с учетом ре-
альных условий и состоит из блока хранения моделей ситуаций, блока моделирования условий и
процесса функционирования МРЛС, а также блока идентификации.
Рис.16
Обстановка, в которой функционирует МРЛС, представляется ансамблем частных ситуа-
ций:
целевая обстановка (количество объектов наблюдения в заданном секторе обзора, ко-
ординаты и параметры траектории каждой из них, а также количество целей в объеме разреше-
ния по каждому из информационных каналов интеллектуальной многоканальной РЛС ) - информа-
ция о ней поступает от блока обработки сигналов, а также от блока управления;
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
помеховая обстановка (количество помех, их координаты, энергетические и частотные
характеристики) - информация о ней поступает от блока хранения помеховых ситуаций;
техническое состояние МРЛС, а также климатические условия окружающей среды (темпе-
ратура, влажность, атмосферное давление, ветровые нагрузки) - информация о нем поступает
от блока встроенного контроля;
характер местности и связанные с ним источники погрешностей приема сигнала и опреде-
ления экстраполированных координат объектов наблюдения - информация поступает от блока
хранения ЭКМ.
Кроме того, от блока управления на вход блока поступает информация о используемых в
рассматриваемый интервал времени алгоритмах управления характеристиками МРЛС.
Эти частные ситуации, накладываясь друг на друга в рассматриваемом интервале време-
ни, и образуют обстановку, которая подлежит идентификации в блоке идентификации путем ее
сравнения с типовыми моделями ситуаций, хранящимися в блоке хранения моделей ситуаций.
Формализованная информация об обстановке, в которой функционирует МРЛС, вместе с
информацией от пульта оператора (о приоритетах ОН, параметрах сектора сканирования луча и
т.п.) поступает с первого выхода блока идентификации обстановки на вход блока выбора крите-
риев оптимизации.
В процессе функционирования МРЛС модель окружающей обстановки постоянно уточня-
ется (обновляется).
Информация об эффективности функционирования МРЛС в рассматриваемый интервал
времени при выбранных критериях оптимизации и соответствующих им алгоритмах управления
характеристиками МРЛС поступает на вход блока выбора алгоритмов управления.
Блок выбора критериев оптимизации представляет собой вычислительное устройство, в
котором коды обстановки, поступающие от блока идентификации обстановки , преобразуются в
адреса критериев оптимизации, хранящихся в блоке хранения критериев оптимизации , а вы-
бранный таким образом критерий транслируется в виде кода на вход блока выбора алгоритмов
управления.
Блок выбора алгоритмов управления представляет собой вычислительное устройство
(рис 17) и состоит из блока принятия решения и блока хранения решающих правил. В зависимо-
сти от выбранного критерия оптимизации, информация о котором поступает на его вход в виде
кода и соответствующих этому коду решающих правил, а также эффективности функционирования
МРЛС на рассматриваемом временном интервале, информация о которой поступает от блока
идентификации обстановки, блок осуществляет выбор алгоритмов управления характеристиками
МРЛС из соответствующих блоков хранения и их трансляцию на вход блока управления (см.рис.16
и 17).
Процесс принятия решения о выборе алгоритмов управления характеристиками РЭС, со-
ответствующих обстановке, в которой она функционирует, основан на использовании экспертной
системы.
Блок управления представляет собой вычислительное устройство, осуществляющее
оценку параметров траектории объектов наблюдения и реализующее управление характеристи-
ками МРЛС в соответствии с выбранными алгоритмами. Кроме того, блок осуществляет инфор-
мационный обмен с пультом оператора и транслирует коды выбранных алгоритмов управления
характеристиками МРЛС, а также результаты траекторных измерений на вход блока идентифика-
ции обстановки.
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
от блока выбора
критериев оптимизации
┌──────────────────┐ │
│ Блок хранения │ │
│ решающих ├─────┐ │
│ правил │ │ │ ┌──── от блока идентификации
└──────────────────┘ │ │ │ ситуации
│ │ │ ┌───── от блока хранения
┌───┴───┴───┴───┴─┐ алгоритмов адаптации
│ Блок │ к помехам
к блоку ─────┤ принятия │
управления │ решения ├─── от блока хранения
│ │ алгоритмов адаптации
└───────┬─────────┘ к дестабилизирующим
│ факторам
│
└──────────── от блока хранения
алгоритмов управления
энергетическим
потенциалом и
характеристиками
обнаружения
Рис.17
Таким образом, три последних блока представляют собой вычислительные устройства, ко-
торые в зависимости от функционального назначения МРЛС, а также требований, предъявляемых
к оперативности вычислительного процесса, габаритам и весу аппаратуры, могут бытьвыполнены
в виде микропроцессорных комплектов либо в виде совместимых компьютеров, объединенных
между собой в вычислительную сеть.
Блок хранения алгоритмов адаптации к помехам, блок хранения помеховых ситуаций, блок
хранения ЭКМ, блок хранения алгоритмов адаптации к дестабилизирующим факторам и целевой
обстановке, блок хранения алгоритмов управления энергетическим потенциалом и характеристи-
ками обнаружения имеют однотипную конструкцию, представляют собой программируемые посто-
янные запоминающие устройства (ППЗУ) и могут иметь различные варианты технической реали-
зации.
Блок встроенного контроля преобразует информацию, поступающую от входящих в его
состав датчиков технического состояния элементов МРЛС, реализующих модуляционный метод
СВЧ-контроля [7] и способ НЧ-контроля технического состояния каналов управления АР [15], а
также от датчиков температуры окружающей среды , частоты излучения , состояния геометрии
антенной системы и т.д., в коды, и транслирует ее на вход блока идентификации обстановки .
Функционирование интеллектуальной МРЛС осуществляется следующим образом.
От пульта оператора на блок идентификации обстановки и на блок управления поступает
информация о размерах сектора обзора пространства и направлении его директрисы, о районах
особого внимания и приоритетности различных типов ОН и т.д.
При отсутствии помех сканирование главного лепестка ДН производится путем подачи на
вход блока управления АФР кодов требуемых угловых положений. В результате на входы кана-
лов управления поступают коды команд управления амплитудой и (или) фазой токов возбуждения
соединенных с ними излучателей АР (см.рис. 14).
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Расчет команды управления фазой для i,j канала управления (i, j – координаты излучателя,
определяемые относительно двух ортогональных осей X и Y в плоскости антенны) осуществляет-
ся в соответствии с выражением (1) (см.часть.1, гл.1). Значения фаз, сформированные в блоке
управления АФР в соответствии с (1), устанавливаются в каналах управления с помощью фазов-
ращателей.
При появлении помех определяются помеховые направления путем сканирования главного
лепестка ДН (при работе МРЛС на прием)или путем использования специальной антенны.
Полученная таким образом информация о координатах и характеристиках источников по-
мех поступает на первый вход блока хранения помеховых ситуаций, а на второй его вход посту-
пает подобная информация от блока обработки сигналов, появляющаяся в результате селекции
движущихся целей блоком СДЦ и выделения полезных сигналов обнаружителем.
Приемо-передающий блок в соответствии с кодом команды управления, поступающей от
блока управления, формирует зондирующий сигнал заданной формы и структуры , который затем
через преобразователь и каналы управления поступает на антенную решетку и излучается в
пространство.
Принятый N-элементной АР отраженный от ОН сигнал проходит через каналы управления,
преобразователь и поступает в приемо-передающий блок, где осуществляется его усиление и
преобразование до вида ,позволяющего осуществить дальнейшую обработку.
С выхода приемника сигналы от ОН поступают на блок обработки сигналов (рис.14), где
осуществляется обнаружение сигналов движущихся целей в соответствии с порогом обнаруже-
ния, устанавливаемым с помощью входящего в его состав интегратора, либо в соответствии с ко-
дом команды, поступающей от блока управления. Информация о целевой (сигнальной) обста-
новке , накапливаемая в ОЗУ, поступает к блоку идентификации обстановки , а также к блоку
управления, где осуществляется измерение угловых координат объектов наблюдения, а также
определение их характеристик.
Блок идентификации обстановки (рис.16) осуществляет:
отнесение обстановки, в которой функционирует МРЛС, к определенному классу и выдачу
кода этой обстановки в блок выбора критериев оптимизации и блок выбора алгоритмов управле-
ния (на основе информации об условиях функционирования, поступающей от блоков МРЛС, а
также от пульта оператора);
расчет точностных характеристик , характеристик помехозащищенности , а также пропу-
скной способности МРЛС (т.е. расчет показателей эффективности функционирования МРЛС ) и
выдачу кода этой информации на блок выбора алгоритмов управления на основе информации о
выбранных алгоритмах управления характеристиками МРЛС, поступающей от блока управления.
Отнесение обстановки, в которой функционирует МРЛС, к определенному классу осуще-
ствляется путем построения ее модели в блоке моделирования условий и процесса функциониро-
вания МРЛС на основе исходных данных, поступающих от ее блоков, а также от пульта управле-
ния, и последующего ее сравнения с моделями ситуаций, хранящимися в блоке хранения моде-
лей ситуаций ( см.рис.16). Результаты сравнения кодируются. Причем, каждой составной части
обстановки соответствуют определенные элементы кода, поступающего на блок выбора критери-
ев оптимизации.
Расчет характеристик функционирования МРЛС осуществляется на основе вычисления ее
интегральных характеристик излучения (т.е. построения диаграммы направленности АР) и пропу-
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
скной способности МРЛС по данным целевой и помеховой обстановки, а также данных о техни-
ческом состоянии МРЛС.
В качестве критериев оптимизации используются правила, в соответствии с которыми
определяются требования к показателям эффективности функционирования МРЛС. Требования к
показателям эффективности функционирования МРЛС могут распространяться на все ОН либо на
их отдельные виды. Критерии выбираются в соответствии с кодом обстановки, поступающей от
блока идентификации.
Блок выбора алгоритмов управления (рис.14 и 17) на основе данных о критерии оптимиза-
ции , поступающих от блока выбора критериев оптимизации, осуществляет выбор алгоритма
управления АФР на раскрыве АР, алгоритма распределения временного ресурса МРЛС по этапам
функционирования (поиск, автозахват и автосопровождение) для различных ОН, алгоритмов
управления энергетическим потенциалом МРЛС и характеристиками обнаружения, позволяющими
осуществить максимизацию показателей эффективности функционирования МРЛС в реальных
условиях окружающей обстановки (которые рассчитываются в блоке идентификации) на основе
адаптации к целевой и помеховой обстановке, а также к дестабилизирующим факторам окружаю-
щей среды и к характеру местности. Алгоритмы адаптации , хранящиеся в соответствующих бло-
ках (см.рис.14), по сути представляют собой различные алгоритмы управления АФР, характери-
стиками обнаружения и энергетическим потенциалом МРЛС, а также алгоритмы распределения
временного ресурса МРЛС.
Блок управления реализует выбранные алгоритмы управления МРЛС, преобразуя их коды
в коды команд управления характеристиками МРЛС. В приемо-передающем блоке в соответствии
с этим командами осуществляется управление характеристиками зондирующего сигнала, в блоке
обработки сигналов – управление порогом обнаружения и количеством когерентно накапливаемых
импульсов, а в блоке управления АФР – управление амплитудно-фазовым распределением на
раскрыве АР.
Блок управления осуществляет измерение параметров траекторий ОН и реализует задан-
ные темпы обращения к различным типам ОН в соответствии с кодами алгоритмов, поступающими
от блока выбора алгоритмов. Кроме того, блок транслирует на блок идентификации обстановки
поступающие на него коды алгоритмов управления (таким образом замыкается обратная связь,
позволяющая блоку идентификации оценить эффективности выбранных алгоритмов управления и
использовать эту информацию, транслируя ее на блок выбора алгоритмов управления), и инфор-
мирует оператора о сигнально-помеховой обстановке, о техническом состоянии МРЛС, а также о
соответствии ее характеристик требованиям, диктуемым обстановкой.
Блок управления АФР как и в устройстве-прототипе реализует формирование кодов ко-
манд управления каналами управления АР (в рассматриваемом случае - фазовращатели) в соот-
ветствии с кодом направления главного максимума ДН и выбранными алгоритмами адаптации
МРЛС к дестабилизирующим факторам ( т.е. является по сути дела вычислителем фаз).
Расширении его функциональных возможностей такого построения МРЛС по сравнению с
рассмотренными ранее структурами заключается в адаптивном управлении ее функционировани-
ем, обеспечении устойчивости функционирования МРЛС при воздействии на нее дестабилизи-
рующих факторов и помех, также в повышении оперативности управления лучом путем использо-
вания: информации о ее техническом состоянии, поступающей от блока встроенного контроля.