Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. Часть II
Подождите немного. Документ загружается.

грады. Размеры уязвимых элементов определяются наименьшими размерами поражающих эле-
ментов. Затем формируются матрицы состояния ФАР для различных видов повреждений ее эле-
ментов:
где i - номер вида повреждения уязвимого элемента ( i = 1,k);
m,n - номер строки и столбца ФАР соответственно ( m = 1,M; n = 1,N);
(m,n) - событие повреждения mn-го уязвимого элемента ФАР i-го вида, определяемое выражением
S
i
m,n) = S
Ai
(m,n)
U
S
Фi
(m,n) , (6)
где
δА
i
(m,n) и δФ
i
(m,n) - погрешности установки амплитуды и фазы тока возбуждения mn-го
излучателя ФАР, вызванные событием S
i
(m,n).
Формирование матриц S
Ai
(m,n) и S
Фi
(m,n) осуществляется на основе результатов прове-
денных экспериментальных исследований и (или) аналитических оценок влияния механических
повреждений на характеристики каналов управления и излучателей ФАР.
При идентификации технического состояния МРЛС после формирования матриц состояния
по данным встроенного контроля (о координатах поврежденных элементов и связанных с ними
каналов управления, а также виде их повреждения) определяются интегpaльные характеристики
излучения МРЛС. Эту функцию реализует субблок расчета интегральных характеристик излучения
и (или) приема. Используемый в нем алгоритм расчета интегральных характеристик ФАР, струк-
турная схема которого представлена на рис. 10. содержит следующие блоки:
блок ввода исходных данных, на который поступает информация об угловом положении
луча ФАР от субблока управления, а также задаются параметры конструкции ФАР: количество из-
лучателей, расстояние между ними и структура СУЛ, разрядность и тип фазовращателей, разме-
ры уязвимых элементов ФАР, ее модулей и подрешеток, раскладка кабелей питания, возбужде-
ния и управления каналов ФАР, а также количество и размеры поражающих элементов, которые
достигли полотна ФАР; блок формирования амплитудно-фазового распределения (АФР), осущест-
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
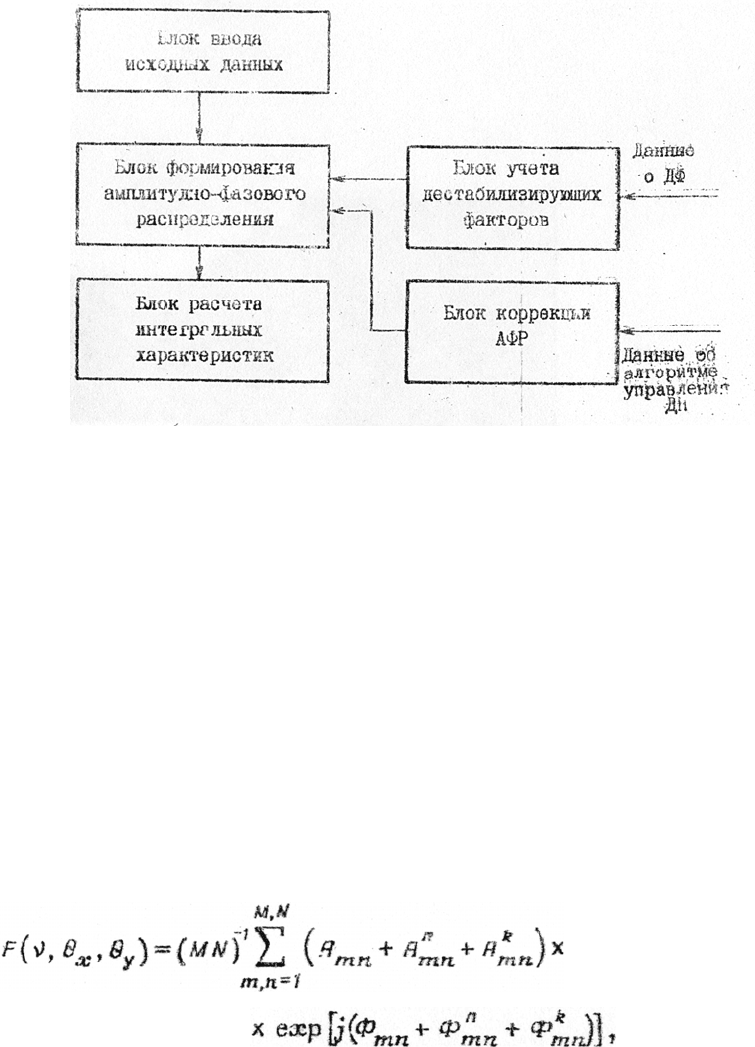
вляющий расчет амплитуд и фаз токов возбуждения элементов ФАР и формирующий матрицы
требуемого для установки луча в заданное положение АФР А
mn
и Ф
mn
;
Рис.10
блок учета дестабилизирующих факторов, использующий матрицы S
Ai
(m,n) и S
Фi
(m,n), а
также данные о воздействии ДФ ( о температурном и частотном разбросах характеристик каналов
управления ФАР, об изменениях геометрии ФАР, отказах элементов, помехах и пр.) и формирую-
щий матрицы погрешностей А
п
mn
и Ф
п
mn
;
блок коррекции АФР, осуществляющий имитацию функционирования адаптивной системы
управления лучом ФАР и формирующий в соответствии с выбранными алгоритмами управления
АФР матрицы корректирующих воздействий А
k
mn
и Ф
k
mn
;
блок расчета интегральных характеристик ФАР, в котором на основе классического выра-
жения Эйлера для множителя решетки излучателей осуществляется расчет диаграммы направ-
ленности ФАР в заданной плоскости углов v для заданного углового положения луча
Θ
х
,Θ
у
:
(9)
где m, n - номер строки и столбца ФАР соответственно ( m = 1, М ; n = I, N), и определяют-
ся погрешность установки главного максимума ДН в заданное направление, снижение уровня
главного максимума ДН, уровень излучения в помеховом направлении, уровень бокового излуче-
ния, уровень первого бокового лепестка ДН, а также осуществляется оценка крутизны дискрими-
наторной характеристики моноимпульсного измерителя угловых координат и погрешности изме-
рения угловых координат.
В субблоке расчета показателей эффективности функционирования МРЛС рассчитыва-
ются следующие характеристики:
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
дальность обнаружения объектов наблюдения D,

Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
уровень первых боковых лепестков V (либо уровень излучения в помеховом направле-
нии),
ошибка определения экстраполированных координат объектов наблюдения E
max
и отно-
сительная пропускная способность РЛС Q
и
при выбранных алгоритмах управления характеристи-
ками МРЛС.
Определение пропускной способности Q
и
может осуществляться аналитическим методом
(в соответствии с методикой, изложенной в [16]) либо путем моделирования реального потока ОН
и обслуживания их МРЛС, находящейся в определенном техническом состоянии.
3атем эти величины сравниваются с допустимыми значениями снижения минимально
возможной дальности обнаружения объектов наблюдения D
min
и относительной пропускной спо-
собности МРЛС Q
и min
, а также максимально возможного уровня боковых лепестков диаграммы
направленности V
max
(зависящего от вероятного уровня мощности, создаваемого помехой в рас-
крыве антенны) и погрешности измерения экстраполированных координат объектов наблюдения
Е
max
доп
.
Полученные данные о характеристиках МРЛС позволяют выбрать наиболее приемлемые
алгоритмы управления характеристиками МРЛС, а также оценить устойчивость ее функциони-
рования в условиях боевой обстановки.
Следует отметить, что выбор алгоритмов управления характеристиками ФАР методом
перебора потребует огромных вычислительных затрат. Поэтому принятие решения о выборе
алгоритмов предлагается осуществлять после отнесения ситуации, в которой функционирует
МРЛС, к определенному классу, который в свою очередь, однозначно определяет критерии
этого выбора [12]. Определение класса при этом осуществляется путем сравнения реальной
ситуации с эталонными или пороговыми значениями, определяющими переход ситуации из
класса в класс.
Определение критерия выбора и выбор алгоритмов управления характеристиками МРЛС
Критерии выбора алгоритмов управления характеристиками МРЛС по сути являются алго-
ритмами оптимизации. В качестве критериев оптимизации используются правила, в соответствии с
которыми определяются требования к показателям эффективности Функционирования МPЛС. На-
пример, для рассматриваемого типа РЛС могут быть использованы следующие критерии:
максимума пропускной способности МРЛС при заданной точности определения координат
ОН, заданном уровне и скорости перемещения помех и заданном уровне ложной тревоги;
максимума дальности обнаружения ОН при заданном уровне боковых лепестков ДН ФАР, а
также заданном направлении ее нулей на помехи;
минимума погрешности определения экстраполированных координат ОН при заданной
пропускной способности МРЛС, заданном уровне и скорости перемещения помех, заданном уров-
не ложной тревоги. Эти требования, в свою очередь, формируют требования к организации про-
ведения этапов функционирования МPЛС и по сути к качеству управления AФP на раскрыве ФАР,
энергетическим потенциалом МРЛС и характеристиками обнаружения.
В соответствии с этими требованиями выбираются алгоритмы адаптации характеристик
ФАР к помеховой обстановке, алгоритмы первичной и вторичной обработки радиолокационной ин-
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
формации, а также алгоритмы компенсации погрешностей реализации требуемого АФР на раскры-
ве ФАР.
Поскольку алгоритмы адаптации ФАР к помехам, а также адаптивные алгоритмы первичной
и вторичной обработки рассмотрены в [l3, 16, 31], остановимся на алгоритмах компенсации погреш-
ностей реализации требуемого АФР.
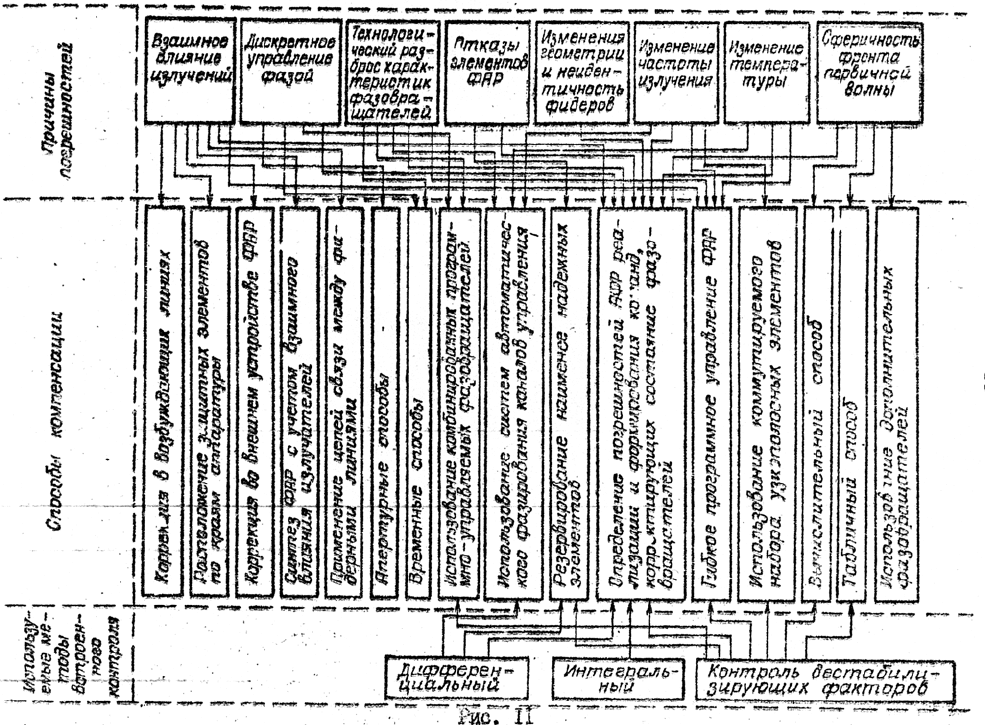
Способы компенсации погрешностей, вызванных воздействием дестабилизирующих факто-
ров, используют в качестве исходных данных априорную информацию о их влиянии на характери-
стики каналов управления ФАР (полученную в результате испытаний) и (или) результаты встроен-
ного контроля. Классификация способов компенсации представлена на рис. 11. Рассмотрим сущ-
ность этих способов.
Диаграммы направленности излучающих элементов антенной решетки конечных размеров
зависят от взаимного влияния этих элементов, причем это влияние неодинаково для излучателей,
занимающих различное положение на раскрыве. Применение на краях раскрыва ФАР пассивных
защитных элементов, имеющих согласованную нагрузку, позволяет скорректировать различия в
диаграммах направленности излучателей. В этом случае реальная диаграмма направленности
ФАР определяется как произведение ее множителя на диаграмму направленности излучательно-
го элемента, так как каждый из излучателей имеет по существу одинаковое окружение и следова-
тельно их диаграммы направленности одинаковы. Однако при использовании дополнительных
(защитных) элементов увеличиваются габариты и вес антенны.
Взаимное влияние излучателей ФАР может быть скорректировано путем учета данных о
величине их взаимных связей при расчете команд управления каналами управления ФАР [17].
Однако такой способ коррекции требует высокой точности установки фазовых состояний каналов
управления ФАР - до 0,1 град.
Коррекция характеристик излучательных элементов антенной решетки, имеющей циф-
ровой блок управления в каждом из каналов ФАР, осуществляется следующим образом [18]. Ха-
рактеристика выходного сигнала mn-го элемента антенной решетки х
mn
линейно связана с харак-
теристиками плоской волны падающей на раскрыв mn-го излучателя. На основании этого опре-
деляющие векторы х
dmn
(х
dmn
– желаемая характеристика выходного сигнала mn-го элемента) опи-
сываются выражением
х
mn
= C
mn
х
dmn
,
где C
mn
– коэффициент связи.
Следовательно
х
dmn
= C
-1
mn
х
mn
. (10)
Таким образом, коррекция взаимного влияния излучающих элементов антенной решетки
выполняется путем умножения принятого mn-м излучателем сигнала на инверсную матрицу связи
C
-1
mn
. Значения коэффициентов связи определяются путем проведения измерений на этапе из-
готовления антенны. Затем преобразованные в цифровой код они хранятся в памяти компьютера.
Использование этого способа позволяет снизить уровень боковых лепестков диаграммы
направленности от -20 до -30 дБ [18].
Следует заметить, что при механических повреждениях излучателей ФАР значения
С
mn
в каналах управления необходимо корректировать, используя данные встроенного контроля,
а также зависимости значений коэффициентов связи C
mn
от характеристик излучателя, получен-
ные в результате испытаний.
Коллимация излучения, то есть преобразование сферического фронта волны первично-
го излучателя в плоский фронт на раскрыве антенны, осуществляется:
включением в каналы управления последовательно с управляемыми фазовращателями
дополнительных неуправляемых фазовращателей;
использованием вычислителя, осуществляющего расчет фазового распределения на
раскрыве ФАР с учетом коллимационных поправок для каждого из фазовращателей (вычисли-
тельный способ);
введением в состав каждого канала управления блока памяти и сумматора для запоми-
нания кода коллимационной поправки и суммирования его с кодами команды управления, посту-
пающими от вычислителя фазового распределения (табличный способ) [30].
Излучатели ФАР возбуждаются электромагнитным полем, распределение которого опре-
деляется геометрией облучателя, его расположением относительно раскрыва ФАР, а также гео-
метрией ФАР.
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
С изменением длины волны изменяется распределение поля на раскрыве ФАР. Для
обеспечения коллимации первичного излучателя в широком диапазоне рабочих частот необ-
ходимо учитывать изменение длины волны при формировании коллимационных поправок. Систе-
мы управления лучом ФАР, использующие табличный способ коллимации, вынуждены хранить
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
в блоках памяти каналов управления коллимационные поправки для каждой рабочей частоты
излучения или использовать одно (центральное) запоминающее устройство, емкость которого
определяется выражением
S = M N (p + 1)N
f
N
b
, (11)
где М и N – число строк и столбцов ФАР соответственно;
N
f
– число рабочих частот;
N
b
– количество возможных форм луча;
p - число разрядов фазовращателя, необходимых для записи коллимационной
поправки.
Вычислительный способ расчета коллимационных поправок лишен этого недостатка.
При этом может быть обеспечена возможность использования при управлении лучом ФАР допол-
нительных устройств, осуществляющих коррекцию фазовых состояний каналов управления при
воздействии на МРЛС различных ДФ [14].
Процесс функционирования ФАР с изменяющейся во времени геометрией, а также спосо-
бы компенсации отклонений ее характеристик направленности, вызванных этими изменениями,
основаны на измерении координат контрольных точек полотна ФАР либо фазовых центров ее из-
лучателей [19,20]. Однако рассмотренные в этих работах способы не могут быть использованы
для fдаптивной коррекции погрешностей, так как требуют перевода ФАР из штатного режима в
режим функционального контроля. Поэтому для этих целей чаще используют лазерные средства
измерения координат, а также датчики углового положения ФАР, которые не влияют на работу
МРЛС.
Проведенный в [7] анализ способов компенсации погрешностей дискретного управления
ФАР показывает, что увеличение числа разрядов дискретных фазовращателей оказывается не-
целесообразным не только потому, что это приведет к усложнению и удорожанию ФАР в целом,
но и потому, что в этом случае возрастут потери в фазовращателях. Более предпочтительной
мерой уменьшения погрешностей дискретного управления является разрушение периодичности
их распределения на раскрыве ФАР (декорреляция фазовых погрешностей).
В настоящее время применяются апертурные и временные методы декорреляции. Воз-
можности апертурных методов, в которых декорреляция осуществляется путем введения случай-
ного или нелинейного распределения начальной фазы токов возбуждения излучателей с после-
дующей их компенсацией при формировании кодов управления фазовращателями, в конечном
счете ограничены величиной дискрета переключения Δφ.
Среди временных методов наибольшее распространение получил способ "изофазной
подставки", при котором фазовые состояния каналов управления ФАР одновременно в каждом
периоде зондирования изменяются на одну и ту же величину φ
к
( φ
к
– изофазная подставка) [30]:
φ
к
= К Δφ/R , (12)
где R — количество зондирований при одном положении луча;
К — номер дополнительного значения фазы, К = 0,1,2,..., R-1.
Код управления фазовращателями при этом формируется в соответствии с алгоритмом

φ
к
mn упр
= Δφ Ent {[ φ
л mn
– φ
нач mn
– φ
к
] / Δφ+ 0,5} , (13)
Если усреднение погрешности измерений осуществляется по K зондированиям, а ве-
личина φ
к
равномерно распределена в интервале (0, Δφ ), то среднеквадратическая погрешность
фазового распределения, определяется соотношением [21]
, (14)
что эквивалентно применению фазовращателей с дискретом переключения равным Δφ/К.
Разброс характеристик фазовращателя обусловлен несовершенством технологии (произ-
водственный разброс), а также изменениями температуры окружающей среды и рабочих частот
РЛС (температурный и частотный разброс).
Существенно снизить погрешности установки состояний фазовращателей, обусловленные
разбросом их характеристик, а также старением пассивных элементов СВЧ - тракта (циркуляторов,
делителей - сумматоров СВЧ - мощности, фазовращателей и т.п.), позволяют системы автомати-
ческого фазирования каналов управления ФАР. Такие системы предполагают использование в
ФАР аналоговых или комбинированных (дискретно-аналоговых) фазовращателей [30].
Система автоматического фазирования, обеспечивающая установку фаз в диапазоне час-
тот 3,…, 3,5 ГГц, имеет максимальную погрешность установки фазы 5,1 град. Однако использова-
ние таких систем в мобильных РЛС в настоящее время вызывает трудности, связанные с увеличе-
нием габаритов и веса каждого из каналов управления.
Существенно снизить погрешности установки состояний фазовращателей, обусловленные
технологическим разбросом их характеристик, изменениями температуры окружающей среды, а
также сменой рабочей частоты, позволяет использование программно-управляемых фазовраща-
телей [11].
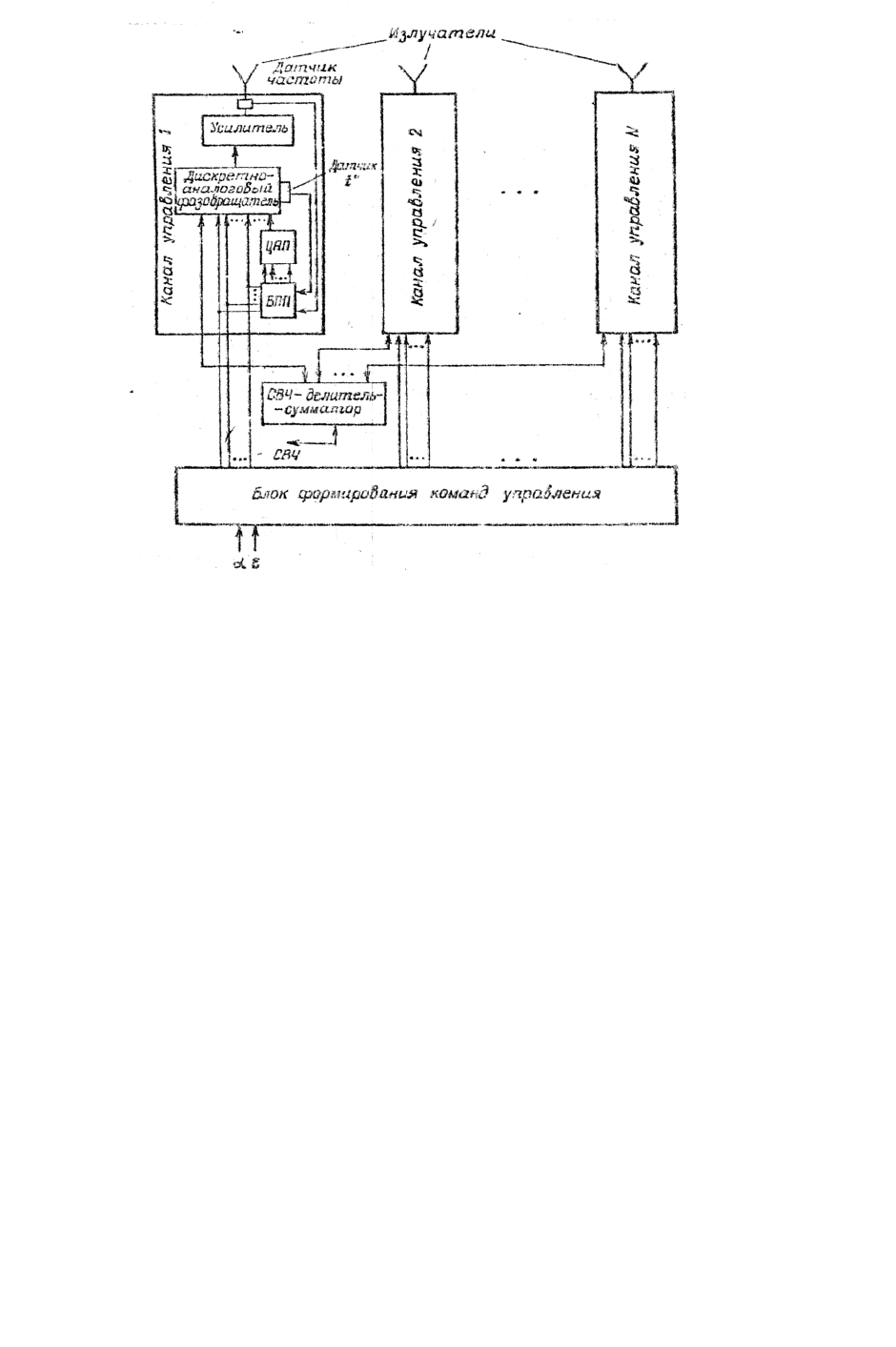
Плавное управление фазовым сдвигом (в пределах величины дискрета переключения) в
этом случае осуществляется с помощью цифро-аналогового преобразователя (ЦAП) (рис. 12).
Блок программируемой памяти (БПП), управление которым осуществляется командами от блока
управления (БУ), поступающими также на дискретно-управляемые секции фазовращателя, фор-
мирует двоичный код коррекции погрешностей установки состояний этих секций, преобразуемый
затем с помощью ЦАП в напряжение, используемое для аналогового управления состоянием фа-
зовращателя.
Технологический разброс характеристик каждого из фазовращателей ФАР носит сугубо
индивидуальный характер. Поэтому БПП каждого из каналов управления (КУ) будет иметь свой
особый набор из L чисел. Эти числа находятся заранее (на этапе изготовления КУ ФАР) на осно-
ве результатов измерения погрешностей установки фазовращателя в каждое из L состояний.
Использование результатов контроля за изменением температуры и частоты излучения по-
зволяет программно-управляемым фазовращателям компенсировать температурные и частотные
погрешности своих фазовых состояний. Число рабочих частот N
f
, и температурных диапазонов N
t
определяет требуемый объем памяти БПП р-разрядного канала управления, как
S = N
f
N
t
L(р + 1) . (15)
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
Рис.12
Программное управление ФВ может осуществляться и с использованием центрального
БПП, общего для всех каналов управления ФАР. Информация, хранящаяся в этом БПП, исполь-
зуется в качестве просмотровой таблицы для температурной и частотной компенсации, а также
коррекции неравенства длин фидеров.
Для расширения частотного диапазона ФАР с программным управлением используется
набор коммутируемых элементов (излучателей, делителей мощности, согласующих цепей и т. п.),
подключение которых осуществляется на основе результатов встроенного контроля частоты излу-
чения.
Для повышения надежности ФАР применяют избыточное число ФВ в КУ с высокой энергией
возбуждения, а также резервирование элементов, имеющих низкую надежность [23].
Однако такие способы компенсации погрешностей реализации заданного амплитудно-
фазового распределения на раскрыве ФАР потребуют значительных изменений в ее конструкции,
увеличения габаритов и веса. Способ, позволяющий осуществить коррекцию изменений в диа-
грамме направленности ФАР, возникающих при отказах в каналах управления, без измерения
параметров поля на раскрыве, приведен в [24]. Оценка отклонений направления луча получается
в результате моделирования ФАР с учетом изменений технического состояния ее каналов
управления. В состав системы управления лучом ФАР входят устройства, определяющие отказы
фазовращателей на основе анализа кодов их состояний. Недостатком такого способа является
необходимость большого объема памяти компьютера, определяемого как
p
S = M N 4 Q, (16)
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
где Q - число возможных поло
аналоговых фазовращателей, а также фазов-
ращате
зирования, вызванных производствен-
ным ра
уется в соот-
ветстви
Δφ{Ent [(φ
л mn
– φ
нач mn
)/ Δφ + 0,5] + l } + φ
нач mn
, (17)
ер фазовой подставки поступающей в младшие разряды с
ждым
P
состояния mn-го фазовращателя
л ащателей в дискретные состояния в соответствии
с задан
.
разбро
(18)
где φ
сист mn
и φ
(S)
mn
еля соответственно.
mn
(19)
динамического управления ФАР.
азовраща-
теля св
-
ниях полотна ФАР, вызывающих асимметрию ампли-
тудного
-
жений луча.
Использование комбинированных дискретно-
лей с программным управлением для снижения негативного влияния разброса их парамет-
ров ведет к значительному возрастанию стоимости ФАР.
Практически полная компенсация погрешностей фа
збросом характеристик фазовращателей, а также выходами из строя их переключающих
элементов, может быть достигнута при динамическом управлении ФАР [14, 25, 26].
В этом случае код управления фазовращателем mn-го излучателя формир
и с алгоритмом:
φ
(l)
mn
=
где l - ном , фазовращателей
ка зондированием (l = 0,1,2,..., 2 -1);
{
*
} = S
mn
– номер дискретного
( S
mn
= 0, 1, 2,..., 2
P
–1).
Таким образом, пос е установки фазовр
ным направлением излучения и начальной фазой тока возбуждения mn-го излучателя
периодически переключают одновременно все фазовращатели в очередное дискретное состоя-
ние с таким расчетом, чтобы за время пребывания луча ФАР в заданном направлении каждый
фазовращатель принял все свои дискретные состояния в течение одинаковых отрезков времени
Погрешность установки фазового состояния mn-го фазовращателя ФАР, обусловленная
сом его параметров, а также отказами (обрывами или короткими замыканиями) его пере-
ключающих элементов, может быть представлена выражением
φ
(S)
отк mn
= φ
сист mn
+ φ
(S)
mn
,
- систематическая и случайная погрешности установки фазовраща-
т
Погрешность φ
(S)
mn
представляет собой центрированную случайную величину, т.е.
2
P
-1
∑φ
(S)
=0.
i=0
Поэтому она полностью компенсируется в процессе
В результате динамического управления, погрешности установки состояний ф
одятся к систематической погрешности. В соответствии с (18) и (19) погрешности уста-
новки луча сводятся к систематическим погрешностям, величина которых постоянна для всей со
вокупности возможных значений. Это позволяет при компенсации систематической погрешности
установки луча ФАР, обусловленной систематическими погрешностями установки фазовращате-
лей, реализовать электронную юстировку луча, сократив при этом требуемый объем памяти,
определяемый выражением (16), в Q раз.
Однако, при механических поврежде
распределения токов возбуждения излучателей, эффективность использования дина-
мического управления ФАР может быть обеспечена лишь после проведения мероприятий по ком
пенсации этой асимметрии.
Голик А.М. Многоканальные радиолокационные станции разведки огневых позиций. МО. 1997
К таким мероприятиям можно отнести: использование аттенюаторов ров в каждом из кана-
лов управления для создания в симметрично расположенных элементах ФАР аналогичной ситуа-
ции по результатам встроенного контроля; отключение подачи СВЧ-энергии от вышедшего из
строя элемента ФАР и перераспределение энергии передатчика между остальными элементами (в
проходных ФАР); установку металлических пластин на вышедшие из строя элементы ФАP и учет
обеспечиваемого ими постоянного фазового сдвига в систематической погрешности установки лу-
ча при динамическом управлении ФАР.
Значительно повысить устойчивость функционирования МРЛС при механических повреж-
дениях ее полотна позволяет защита элементов ФАР осуществляющих передачу СВЧ-энергии, а
также команд управления и напряжения питания к ее каналам управления.
Таким образом, адаптивное управление характеристиками МРЛС позволяет осуществить
наиболее эффективное использование безинерционного управления лучом ФАР, используя на
основе идентификации ситуации различные способы управления энергетическим потенциалом,
различные способы первичной и вторичной обработки данных. а также различные способы ком-
пенсации погрешностей, обусловленных наличием дестабилизирующих факторов. При этом эф-
фективность МРЛС сильно зависит от ее системы управления и обработки данных, задача которой
состоит в наиболее полной реализации возможностей, определяемых энергетическим потенциа-
лом станции и параметрами ее систем. Особенностью функционирования системы управления и
обработки данных является то, что она должна обеспечить высокую эффективность МРЛС в усло-
виях быстро изменяющейся и в общем случае неопределенной целевой и помеховой обстановки.
Для успешного решения этой задачи система должна быть адаптивной и обучающейся. Это зна-
чит, что она способна усваивать информацию о неизвестных свойствах внешней среды и накоп-
ленный опыт впоследствии использовать для принятия решений, что приводит,. в конечном счете,
к улучшению качества ее работы.
Задачи, решаемые системой:
общее управление МРЛС;
обработка первичной и вторичной информации;
подготовка данных для выдачи на дисплей и через АПД в каналы связи;
диалог с оператором;
адаптивное управление характеристиками МРЛС в условиях воз действия ДФ;
имитацию ОН для обучения операторов.
Общее управление МРЛС включает в себя следующие функции:
выбор и установление очередности обслуживания требований на ведение поиска в
различных областях пространства, обнаружение траекторий и сопровождения целей;
выбор способа ведения поиска, периода проведения траекторных измерений на этапах
обнаружения траекторий и сопровождения ОН;
задание периода следования и длительности зондирующих импульсов, количества ин-
тегрируемых импульсов и мощности излучаемых сигналов;
регулировка усиления приемника (временная регулировка усиления, логарифмическое
усиление, режим малой постоянной времени);
управление параметрами обнаружителя;
анализ помеховой обстановки и соответствующий выбор частоты зондирующего сиг-
нала, вида модуляции, порога обнаружения, режимов работы системы СДЦ, способа формирова-
ния провалов в ДН, имеющих помеховые направления;