Gockenbach M.S. Partial Differential Equations. Analytical and Numerical Methods
Подождите немного. Документ загружается.

28
Chapter
2.
Models
in one
dimension
reference
configuration moves
to (x,
u(x,
t))
at
time
t. We are
thus postulating
that
the
motion
of the
string
is
entirely
in the
transverse direction (this
is one of the
severe
assumptions
that
we
mentioned
in the
previous paragraph). Granted this
assumption,
we now
derive
the
differential
equation satisfied
by the
displacement
u.
Since,
by
assumption,
a
string does
not
resist bending,
the
internal restoring
force
of the
string under tension
is
tangent
to the
string itself
at
every point.
We
will
denote
the
magnitude
of
this restoring
force
by
T(x,
t). In
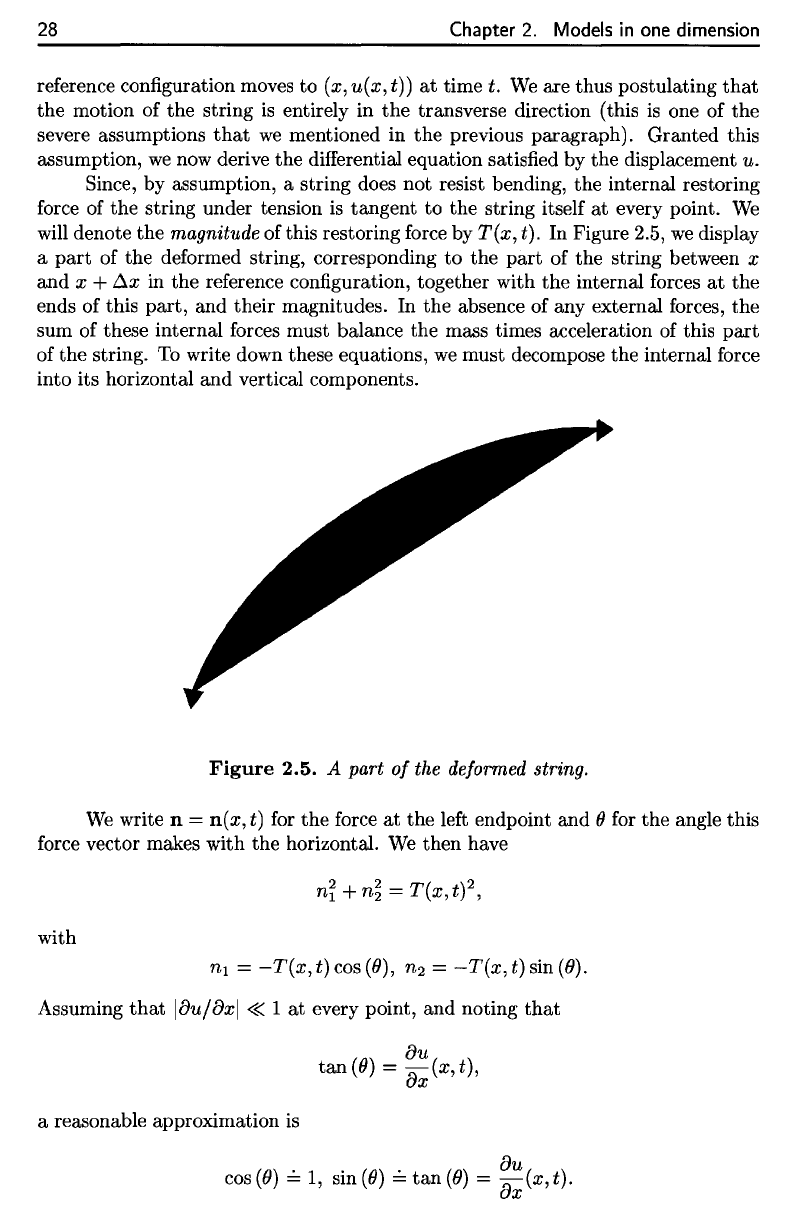
Figure 2.5,
we
display
a
part
of the
deformed
string, corresponding
to the
part
of the
string between
x
and x + Ax in the
reference
configuration, together with
the
internal
forces
at the
ends
of
this
part,
and
their magnitudes.
In the
absence
of any
external
forces,
the
sum
of
these internal
forces
must balance
the
mass times acceleration
of
this
part
of
the
string.
To
write down
these
equations,
we
must decompose
the
internal
force
into
its
horizontal
and
vertical components.
Figure
2.5.
A
part
of
the
deformed
string.
We
write
n =
n(x,
t) for the
force
at the
left
endpoint
and 9 for the
angle this
force
vector makes with
the
horizontal.
We
then have
a
reasonable approximation
is
with
Assuming
that
\du/dx
<C
1 at
every point,
and
noting
that
28
Chapter
2.
Models
in
one dimension
reference configuration moves
to
(x,
u(x,
t))
at
time
t.
We
are thus postulating
that
the motion of the string
is
entirely in
the
transverse direction (this
is
one of
the
severe assumptions
that
we
mentioned in
the
previous paragraph). Granted this
assumption,
we
now derive the differential equation satisfied by the displacement u.
Since, by assumption, a string does not resist bending, the internal restoring
force of the string under tension
is
tangent
to
the string itself
at
every point.
We
will denote the magnitude
ofthis
restoring force by
T(x,
t). In Figure 2.5,
we
display
a
part
of the deformed string, corresponding
to
the
part
of the string between x
and x +
6x
in the reference configuration, together with
the
internal forces
at
the
ends of this part, and their magnitudes. In the absence of any external forces, the
sum of these internal forces must balance the mass times acceleration of this
part
of
the
string.
To
write down these equations,
we
must decompose the internal force
into its horizontal and vertical components.
Figure
2.5.
A part
of
the deformed string.
We
write n = n(x, t) for
the
force
at
the left endpoint
and
0 for
the
angle this
force vector makes with the horizontal.
We
then have
ni
+
n~
=
T(x,
t)2,
with
nl
=
-T(x,
t) cos
(0),
n2
=
-T(x,
t) sin
(0).
Assuming
that
lou/oxl
« 1
at
every point, and noting
that
au
tan
(0)
=
8x(x,t),
a reasonable approximation
is
cos
(0)
==
1,
sin
(0)
==
tan
(0)
=
~~
(x,
t).
where
p is the
density
of the
string
(in
units
of
mass
per
length).
Since this holds
for
all x and
Ax
sufficiently
small,
we
obtain
the
differential
equation
2.3.
The
wave
equation
for a
vibrating string
29
We
then
obtain
Similarly,
the
force
at the
right
end of the
part
of the
string under consideration
is
We
then
see
that
is
(an
approximation
to) the
horizontal component
of the
total
force
on the
part
of
the
string,
and
is
(an
approximation
to) the
vertical component.
By
assumption,
the
horizontal component
of the
acceleration
of the
string
is
zero,
and so
Newton's second
law
yields
thus
the
tension
is
constant throughout
the
string
at
each point
in
time.
We
will
assume
that
the
length
of the
string never changes much
from
its
length
in the
reference
configuration
(which
is
£),
and
therefore
that
it
makes sense
to
assume
that
T is
independent
of t as
well,
that
is,
that
T is a
constant.
Applying Newton's
second
law to the
vertical component yields
We
recognize this
as the
homogeneous wave equation.
It is
usual
to
write this
in
the
form
where
c
2
=
T/p.
The
significance
of the
parameter
c
will
become clear
in
Chapter
7.
In
the
case
that
an
external body
force
is
applied
to the
string
(in the
vertical
direction),
the
equation becomes
2.3. The
wave
equation for a vibrating string
29
We
then obtain
n(x,
t)
===
(
-T(x,
t),
-T(x,
t)
~~
(x,
t))
.
Similarly, the force
at
the right end of the
part
of the string under consideration
is
n(x
+ Llx, t)
===
(T(X
+ Llx, t),
T(x
+ Llx, t)
~~
(x + Llx,
t))
.
We
then see
that
T(x
+ Llx, t) -
T(x,
t)
is
(an approximation to) the horizontal component of
the
total
force on the
part
of
the
string, and
au au
T(x
+ Llx, t)
ax
(x + Llx, t) -
T(x,
t)
ax
(x,
t)
is
(an approximation to) the vertical component.
By assumption,
the
horizontal component of the acceleration of the string
is
zero, and
so
Newton's second law yields
T(x
+ Llx, t) -
T(x,
t) = 0;
thus the tension
is
constant throughout the string
at
each point in time.
We
will
assume
that
the length of the string never changes much from its length in the
reference configuration (which is
f), and therefore
that
it makes sense to assume
that
T
is
independent of t as well,
that
is,
that
T
is
a constant. Applying Newton's
second law
to
the vertical component yields
t+1':!..x
a
2
u
au au
ix
p
at
2
(s, t) ds = T
ax
(x + Llx, t) - T
ax
(x, t)
{X
+1':!..
x a2u
=
ix
T
ax
2
(s, t) ds,
where p
is
the density of
the
string (in units of mass per length). Since this holds
for all x and Llx sufficiently small,
we
obtain the differential equation
a
2
u a
2
u
p
at
2
= T
ax
2
'
0 < x <
£,
t >
O.
(2.18)
We
recognize this as the homogeneous wave equation.
It
is
usual
to
write this in
the form
a
2
u a
2
u
at
2
-
c
2
ax
2
= 0, ° < x <
£,
t > 0,
where
c2
= T /
p.
The significance of the parameter c will become clear in Chapter
7.
In the case
that
an external body force
is
applied to the string (in the vertical
direction), the equation becomes
a
2
u a
2
u
at
2
-
c
2
ax
2
=
I(x,
t), 0 < x <
£,
t>
O.
(2.19)
Exercises
1.
What
units must
f(x,t)
have
in
(2.19)?
2.
What
are the
units
of the
tension
T in the
derivation
of the
wave equation
for
the
string?
3.
What
are the
units
of the
parameter
c in
(2.18)?
4.
Suppose
the
only external
force
applied
to the
string
is the
force
due to
gravity.
What
form
does (2.19) take
in
this case? (Let
g be the
acceleration
due to
gravity,
and
take
g to be
constant.)
5.
Explain
why a
homogeneous Neumann condition models
an end of the
string
that
is
allowed
to
move
freely
in the
vertical direction.
6.
Suppose
that
an
elastic string
is fixed at
both ends,
as in
this section,
and it
sags under
the
influence
of an
external
force
f(x)
(f is
constant with respect
to
time).
What
differential
equation
and
side conditions does
the
equilibrium
displacement
of the
string satisfy? Assume
that
/ is
given
in
units
of
force
per
length.
2.4
Suggestions
for
further
reading
If
the
reader wishes
to
learn more about
the use of
mathematical models
in the
sciences,
an
excellent place
to
start
is the
text
by Lin and
Segel
[36],
which com-
bines modeling with
the
analysis
of the
models
by a
number
of
different
analytical
techniques.
Lin and
Segel cover
the
models
that
form
the
basis
for
this book,
as
well
as
many others.
A
more advanced
text,
which
focuses
almost entirely
on the
derivation
of
differential
equations
from
the
basic principles
of
continuum mechanics,
is
Gurtin
[21].
30
Chapter
2.
Models
in one
dimension
Exercise
1
asks
the
reader
to
determine
the
units
of /.
The
natural boundary conditions
for the
vibrating string,
as
suggested above,
are
homogeneous Dirichlet conditions:
One
can
also imagine
that
one or
both ends
of the
string
are
allowed
to
move
freely
in
the
vertical direction (perhaps
an end of the
string slides along
a
frictionless
pole).
In
this case,
the
appropriate boundary condition
is a
homogeneous Neumann
condition (see Exercise
5).
30
Chapter
2.
Models in
one
dimension
Exercise 1 asks the reader to determine the units of f.
The
natural boundary conditions for the vibrating string, as suggested above,
are homogeneous Dirichlet conditions:
u(O,
t) = u(£, t) = 0, t >
0.
One can also imagine
that
one or
both
ends of the string are allowed
to
move freely
in the vertical direction (perhaps
an
end of the string slides along a frictionless
pole).
In
this case,
the
appropriate boundary condition
is
a homogeneous Neumann
condition (see Exercise 5).
Exercises
1.
What
units must
f(x,
t) have in (2.19)?
2.
What
are the units of
the
tension T in
the
derivation of the wave equation for
the string?
3.
What
are
the
units of the parameter c in (2.18)?
4. Suppose
the
only external force applied
to
the string
is
the force due
to
gravity.
What
form does (2.19) take in this case? (Let g be the acceleration due
to
gravity,
and
take g
to
be constant.)
5.
Explain why a homogeneous Neumann condition models
an
end of the string
that
is
allowed to move freely in
the
vertical direction.
6.
Suppose
that
an
elastic string is fixed
at
both
ends, as in this section,
and
it
sags under the influence of
an
external force
f(x)
(f
is constant with respect
to
time).
What
differential equation
and
side conditions does the equilibrium
displacement of the string satisfy? Assume
that
f
is
given in units of force
per length.
2.4
Suggestions for further reading
If
the reader wishes
to
learn more
about
the use of mathematical models in the
sciences,
an
excellent place
to
start
is
the
text
by Lin and Segel
[36],
which com-
bines modeling with the analysis of the models by a number of different analytical
techniques. Lin and Segel cover the models
that
form
the
basis for this book, as
well as many others.
A more advanced text, which focuses almost entirely on
the
derivation of
differential equations from the basic principles of continuum mechanics,
is
Gurtin
[21].
Chapter
3
linear algebra
The
solution techniques presented
in
this book
can be
described
by
analogy
to
techniques
for
solving
where
A is an n x n
matrix
(A 6
R
nxn
)
and x and b are
n-vectors
(x,b
€
R
n
).
Recall
that
such
a
matrix-vector
equation represents
the
following
system
of n
linear
equations
in the n
unknowns
x\,
#2,
• •
•,
x
n
:
Before
we
discuss methods
for
solving
differential
equations,
we
review
the
funda-
mental facts about systems
of
linear (algebraic) equations.
3.1
Linear
systems
as
linear operator equations
To
fully
appreciate
the
point
of
view
taken
in
this book,
it is
necessary
to
understand
the
equation
Ax = b not
just
as a
system
of
linear equations,
but as a finite-
dimensional linear operator equation.
In
other words,
we
must
view
the
matrix
A
as
defining
an
operator
(or
mapping,
or
simply function)
from
R
n
to
R
n
via
matrix
multiplication:
A
maps
x 6
R
n
to y = Ax
e
R
n
.
(More generally,
if A is not
square,
say A
e
R
mxn
,
then
A
defines
a
mapping
from
R
n
to
R
m
,
since
Ax
G
R
m
for
each
x
e
R
n
.)
The
following
language
is
useful
in
discussing operator equations.
Definition
3.1.
Let X and Y be
sets.
A
function
(^operator,
mapping,)
/
from
X
to Y is a
rule
for
associating with
each
x
e
X a
unique
y £
Y,
denoted
y =
f(x).
The set X is
called
the
domain
of
f,
and the
range
of f is the set
31
Eseential
Chapter 3
ial linear algebra
The
solution techniques presented in this book can be described by analogy
to
techniques for solving
Ax=b,
where A
is
an
n x n
matrix
(A
E RllXll)
and
x
and
bare
n-vectors (x, b E
Rll).
Recall
that
such a matrix-vector equation represents
the
following system of n linear
equations in
the
n unknowns
Xl,
X2,
...
,
Xn:
anXl
+
al2X2
+ ... +
alnX
n
b
l
,
a2lXl
+
a22X2
+ ... +
a2nXn
b
2
,
Before
we
discuss methods for solving differential equations,
we
review
the
funda-
mental facts
about
systems of linear (algebraic) equations.
3.1 Linear systems
as
linear operator equations
To fully appreciate
the
point of view taken in this book,
it
is
necessary
to
understand
the
equation
Ax
= b not
just
as a system of linear equations,
but
as a finite-
dimensional linear operator equation. In
other
words,
we
must view
the
matrix A
as defining
an
operator (or mapping, or simply function) from
Rll
to
Rll
via matrix
multiplication: A maps x
E
Rll
to
Y =
Ax
E
Rll.
(More generally, if A is not
square, say A
E RffiXll,
then
A defines a mapping from
Rll
to
Rffi, since
Ax
E Rffi
for each x E Rll.)
The
following language is useful in discussing operator equations.
Definition
3.1.
Let X and Y
be
sets. A function
(operator,
mapping) f from X
to Y
is
a rule for associating with
each
X E X a unique y E
Y,
denoted y = f (x) .
The
set X
is
called
the domain
of
f,
and the range
of
f
is
the set
R(A)
=
{f(x)
E Y : x E
X}.
31
32
Chapter
3.
Essential linear algebra
We
write
f
:
X
->
Y
("f
maps
X
into
Y")
to
indicate
that
f is a
function
from
X
toY.
The
reader should recognize
the
difference
between
the
range
of a
function
/ : X
—)•
Y and the set Y
(which
is
sometimes called
the
co-domain
of /). The set
Y
merely identifies
the
type
of the
output values
/(#);
for
example,
if Y = R,
then
every
/(#)
is a
real number.
On the
other hand,
the
range
of / is the set of
elements
of
Y
that
are
actually
attained
by /. As a
simple example, consider
/ : R
—>
R
defined
by
f(x)
=
x
2
.
The
co-domain
of / is R, but the
range
of /
consists
of the
set of
nonnegative numbers:
In
many cases,
it is
quite
difficult
to
determine
the
range
of a
function.
The co-
domain,
on the
other hand, must
be
specified
as
part
of the
definition
of the
function.
A
set is
just
a
collection
of
objects (elements); most
useful
sets have operations
defined
on
their elements.
The
most important sets used
in
this book
sue
vector
spaces.
Definition
3.2.
A
vector space
V is a set on
which
two
operations
are
defined,
addition
(if
u,
v
6
V,
then
u
+ v
e
V) and
scalar multiplication
(if
u € V and a
is
a
scalar, then
cm €
V).
The
elements
of the
vector
space
are
called
vectors.
(In
this
book,
the
scalars
are
usually
real
numbers,
and we
assume this unless otherwise
stated.
Occasionally
we use the set of
complex
numbers
as the
scalars.
Vectors
will
always
be
denoted
by
lower
case
boldface
letters.)
The
two
operations must
satisfy
the
following
algebraic
properties:
For
every vector space considered
in
this book,
the
verification
of
these vector
space properties
is
straightforward
and
will
be
taken
for
granted.
Example
3.3.
The
most common example
of a
vector
space
is
(real)
Euclidean
n-space:
32
Chapter
3.
Essential linear algebra
We write f : X
--+
Y
(lif
maps X into
Y")
to indicate that f is a function from X
to
Y.
The reader should recognize the difference between the range of a function
f : X
--+
Y and the set Y (which
is
sometimes called the co-domain of
f).
The set
Y merely identifies
the
type of the
output
values
f(x);
for example, if Y =
R,
then
every
f (x)
is
a real number. On
the
other hand, the range of f
is
the
set of elements
of
Y
that
are actually attained by f.
As
a simple example, consider f : R
--+
R
defined by
f(x)
= x
2
•
The co-domain of f
is
R,
but
the range of f consists of the
set of nonnegative numbers:
R(f)
= [0,00).
In many cases, it
is
quite difficult
to
determine the range of a function. The co-
domain, on the other hand, must be specified as
part
of the definition of
the
function.
A set
is
just a collection of objects (elements); most useful sets have operations
defined on their elements. The most important sets used in this book are
vector
spaces.
Definition
3.2.
A vector space V is a
set
on which two operations are defined,
addition
(if
u,
v E
V,
then u + v E
V)
and scalar multiplication
(if
u E V and a
is a scalar, then
au
E
V).
The elements
of
the vector space
are
called vectors. (In
this
book,
the scalars are usually real numbers, and
we
assume this unless otherwise
stated. Occasionally
we
use the
set
of
complex numbers as the scalars. Vectors will
always
be
denoted
by
lower case boldface letters.}
The two operations
must
satisfy the following algebraic properties:
1.
u + v = v + u for all
u,
v E
V.
2.
(u
+
v)
+ w = u +
(v
+
w)
for all
u,
v,
wE
V.
3.
There is a zero vector 0
in
V with the property that u + 0 = u for all u E
v.
4.
For each u E
V,
there is a vector
-u
E V such that u +
(-u)
=
o.
5.
a(u
+
v)
=
au
+
av
for all
u,
v E V and for all scalars
a.
6.
(a
+
P)u
=
au
+
pu
for all u E V and for all scalars
a,
p.
7.
a(pu)
=
(ap)u
for all u E V and for all scalars
a,
p.
8.
1 u = u for all u E
v.
For every vector space considered in this book,
the
verification of these vector
space properties
is
straightforward and will be taken for granted.
Example
3.3.
The
most
common example
of
a vector space is (real) Euclidean
n-space:
3.1.
Linear
systems
as
linear
operator
equations
33
Vectors
in
R
n
are
usually written
in
column form,
as
it is
convenient
at
times
to
think
of
u
G
R
n
as an n x 1
matrix.
Addition
and
scalar
multiplication
are
defined
componentwise:
Example
3.4.
Apart from Euclidean
n-space,
the
most common vector
spaces
are
function
spaces
—vector
spaces
in
which
the
vectors
are
functions. Functions (with
common domains)
can be
added
together
and
multiplied
by
scalars,
and the
algebraic
properties
of a
vector
space
are
easily
verified.
Therefore,
when
defining
a
function
space,
one
must
only
check
that
any
desired
properties
of
the
functions
are
preserved
by
addition
and
scalar multiplication. Here
are
some important examples:
1.
C[a,
b]
is
defined
to be the set of all
continuous, real-valued functions
defined
on the
interval
[a,
b].
The sum
of
two
continuous functions
is
also
continuous,
as is any
scalar multiple
of a
continuous function.
Therefore,
C[a,
b]
is a
vector
space.
2.
C
l
[a,
b]
is
defined
to be the set of all
real-valued, continuously
differentiate
functions
defined
on the
interval
[a,b].
(A
function
is
continuously
differen-
tiate
if
its
derivative exists
and is
continuous.)
The sum
of
two
continuously
differentiate
functions
is
also
continuously
differentiate,
and the
same
is
true
for a
scalar multiple
of a
continuously
differentiate
function.
Therefore,
C
l
[a,
b]
is a
vector
space.
3. For any
positive
integer
k,
C
k
[a,
b]
is the
space
of
real-valued
functions
defined
on [a,
b]
that have
k
continuous derivatives.
Many vector spaces
that
are
encountered
in
practice
are
subspaces
of
othe
vector
spaces.
Definition
3.5.
Let V be a
vector
space,
and
suppose
W is a
subset
ofV
with
the
following
properties:
1.
The
zero vector
belongs
to
W.
2.
Every linear combination
of
vectors
in W is
also
in
W.
That
is,
if
x, y G W
and
a,
/?
G
R,
then
3.1. Linear systems
as
linear operator equations
33
Vectors
in
R
n
are usually written
in
column form,
as
it
is convenient at times to think
of
u
ERn
as
an n x 1 matrix. Addition and
scalar multiplication
are
defined componentwise:
u + v =
(Ul,
U2,
...
,
un)
+
(VI,
V2,
...
,V
n
)
=
(Ul
+
VI,
U2
+
V2,
•
..
,Un
+ V
n
),
au
=
a(Ul,U2,
...
,Un)
=
(aUl,aU2,
...
,aUn).
Example
3.4.
Apart
from Euclidean n-space, the
most
common vector spaces are
function spaces
-vector
spaces
in
which the vectors are functions. Functions (with
common domains) can
be
added together and multiplied
by
scalars, and the algebraic
properties
of
a vector space are easily verified. Therefore, when defining a function
space, one
must
only check that any desired properties
of
the functions are preserved
by
addition and scalar multiplication. Here
are
some important examples:
1.
C[a,
b]
is defined to
be
the set
of
all continuous, real-valued functions defined
on the interval
[a,
b].
The
sum
of
two continuous functions is also continuous,
as
is any scalar multiple
of
a continuous function. Therefore, C[a,
b]
is a
vector space.
2.
C
1
[a,
b]
is defined to
be
the set
of
all real-valued, continuously differentiable
functions defined on the interval
[a,
b].
(A function is continuously differen-
tiable
if
its derivative exists and is continuous.) The
sum
of
two continuously
differentiable functions
is also continuously differentiable, and the same is
true for a scalar multiple
of
a continuously differentiable function. Therefore,
C
1
[a,
b]
is a vector space.
3.
For any positive integer k, Ck[a,
b]
is the space
of
real-valued functions defined
on
[a,
b]
that have k continuous derivatives.
Many
vector spaces
that
are encountered in practice
are
subspaces
of
other
vector spaces.
Definition
3.5.
Let
V
be
a vector space, and suppose W is a subset
of
V with the
following properties:
1.
The zero vector belongs to
W.
2.
Every linear combination
of
vectors
in
W is also
in
W.
That is,
if
x,
yEW
and
a,
j3
E
R,
then
ax
+
j3y
E
W.
34
Chapter
3.
Essential
linear
algebra
Then
we
call
W a
subspace
ofV.
A
subspace
of a
vector space
is a
vector space
in its own
right,
as the
reader
can
verify
by
checking
that
all the
properties
of a
vector space
are
satisfied
for a
subspace.
Example
3.6.
We
define
The set
C^ja,
b]
is a
subset
of
C
2
[a,b],
and
this subset contains
the
zero function
(hopefully
this
is
obvious
to the
reader).
Also,
if
u,v
e
6%[a,
b],
a,j3
G
R,
and
w
=
au
+
f3v,
then
where
7 and 8 are
nonzero
real
numbers. Then, although
W is a
subset
of
C
2
[a,b],
it is not a
subspace.
For
example,
the
zero function
does
not
belong
to
W,
since
it
does
not
satisfy
the
boundary
conditions. Also,
if
u,
v
e
W and a,
J3
€ R,
then,
with
w =
au
+ flv, we
have
Example
3.8.
We
define
and
so w
e
C^[a,b].
This
shows that
C^[a,b]
is a
subspace
of
C
2
[a,b].
The
previous
two
examples
will
be
used throughout
this
book.
The
letters
"D"
and
"N"
stand
for
Dirichlet
and
Neumann, respectively (see
Section
2.1,
for
example).
The
following
provides
an
important
nonexample
of a
subspace.
Similarly,
Example
3.7.
We
define
w
e
C
2
[a,
b]
(since
C
2
[a,b]
is a
vector
space);
and
w(a)
—
au(a)
+
/3v(a)
=
a-Q
+
0-Q
=
Q,
and
similarly
w(b)
= 0.
Therefore,
w € Cp[a,b],
which shows that
C^a,b]
is a
subspace
of
C
2
[a,b].
The
set
C^[a,b]
is
also
a
subset
of
C
2
[a,b],
and it can be
shown
to be a
subspace.
Clearly
the
zero function
belongs
to
Cj^[a,b].
If
u,v
€
C^[a,b],
a,/?
£ R, and
w
= au + fiv,
then
34
Chapter
3. Essential linear algebra
Then
we call W a subspace
of
V.
A subspace of a vector space
is
a vector space in its own right, as the reader
can verify by checking
that
all the properties of a vector space are satisfied for a
subspace.
Example
3.6.
We
define
C1[a,
b]
=
{u
E C
2
[a,
b]
:
u(a)
= u(b) = o}.
The
set
Cb[a,
bj
is a subset
of
C
2
[a,
b],
and
this subset contains the zero
function
(hopefully this is obvious to the reader). Also,
if
u,v
E Cb[a,b],
a,f3
E
R,
and
w =
au
+
f3v,
then
•
wE
C
2
[a,
bj
(since C
2
[a,
bj
is a vector space); and
•
w(a)
=
au
(a) + f3v(a) =
0.·0
+
f3
. 0 = 0,
and
similarly w(b) =
o.
Therefore,
wE
Cb[a,
b],
which shows
that
Cb[a,
bj
is a subspace
of
C
2
[a,
bj.
Example
3.7.
We
define
C~,[a,bj={uEC2[a,bj:
~~(a)=~~(b)=O}.
The
set
CF,-[a,
bj
is also a subset
of
C
2
[a,
bj,
and
it
can
be
shown
to
be
a subspace.
Clearly the zero
function
belongs to
C;'
[a,
bj.
If
u,
v E
C;'
[a,
b],
a,
f3
E R, and
w =
au
+
f3v,
then
dw
du
dw
dx
(a) = a
dx
(a) +
f3
dx
(a) = a
·0+
f3
. 0 =
o.
Similarly,
~:
(b)
= 0,
and
so w E C;'[a,bj. This shows
that
C;'[a,bj
is
a subspace
of
C
2
[a,
bj.
The previous two examples will be used throughout this book. The letters
"D"
and "N"
stand
for Dirichlet
and
Neumann, respectively (see Section 2.1, for
example).
The following provides an important
nonexample
of a subspace.
Example
3.8.
We
define
W
=
{u
E C
2
[a,bj :
u(a)
=
'Y,
u(b) = 8},
where'Y
and
8 are nonzero real numbers. Then, although W
is
a subset
of
C
2
[a,
bj,
it
is
not
a subspace. For example, the zero
function
does
not
belong to
W,
since
it
does
not
satisfy the boundary conditions. Also,
if
u,
v E
Wand
a,
f3
E
R,
then,
with w =
au
+
f3v,
we have
w(a) =
au(a)
+ f3v(a) =
a'Y
+
f3'Y
=
(a
+
(3)"(.
7
The
word
"operator"
is
preferred over "function"
in
this context, because
the
vector spaces
themselves
are
often
spaces
of
functions.
3.1.
Linear systems
as
linear
operator
equations
35
Thus
w(a)
does
not
equal
7,
except
in the
special
case
that
a +
(3
=
I.
Similarly,
w(b)
does
not
satisfy
the
boundary
condition
at the
right endpoint.
The
concept
of a
vector space allows
us to
define
linearity, which describes
many simple processes
and is
indispensable
in
modeling
and
analysis.
Definition
3.9.
Suppose
X and Y are
vector
spaces,
and f : X
—>•
Y is an
operator
(or
function,
7
or
mapping)
with domain
X and
range
Y.
Then
f is
linear
if and
only
if
This
condition
can be
expressed
as the
following
two
conditions, which together
are
equivalent
to
(3.1):
A
linear
operator
is
thus
a
particularly simple kind
of
operator;
its
simplicity
can be
appreciated
by
comparing
the
property
of
linearity
(e.g.
f(x
+
y}
=
f(x)
+
f(y)}
with common nonlinear operators:
^/x
+ y
^
^-\-^Jy->
sin (x + y)
^
sin
(x)
+
sin(?/),
etc.
f
(x)
= Ax,
Example
3.10.
The
operator
defined
by a
matrix
A G
R
mxn
via
matrix-vectoi
multiplication,
is
linear;
the
reader
should
verify
this
if
necessary (see Exercise
7).
Moreover,
it
can
be
shown that
every
linear operator
mapping
R
n
into
R
m
can be
represented
by
a
matrix
A €
R
mxn
in
this
way
(see Exercise
8).
This
explains
why the
study
of
(finite-dimensional)
linear
algebra
is
largely
the
study
of
matrices.
In
this
book,
matrices
will
be
denoted
by
upper
case
boldface
letters.
Example
3.11.
To
show that
the
sine function
is not
linear,
we
observe that
while
Example
3.12.
Differentiation
defines
an
operator
3.1. Linear systems
as
linear operator equations
35
Thus w(a) does
not
equal
,,(,
except
in
the special case that a +
j3
= 1. Similarly,
w(b) does
not
satisfy the boundary condition at the right endpoint.
The
concept
of
a vector space allows
us
to
define linearity, which describes
many
simple processes
and
is indispensable
in
modeling
and
analysis.
Definition
3.9.
Suppose X and
Yare
vector spaces, and f : X -+ Y is an operator
(or function,
7
or mapping) with domain X and range
Y.
Then f is linear
if
and
only
if
f(ax
+
j3z)
=
af(x)
+ j3f(z) for all
a,
j3
E
R,
x, z E
X.
(3.1)
This condition can
be
expressed
as
the following two conditions, which together
are
equivalent to (3.1):
1.
f(ax)
=
af(x)
for all x E X and all a E
R;
2.
f(x
+ z) = f(x) + f(z) for all
x,z
E
X.
A linear
operator
is
thus
a
particularly
simple
kind
of
operator;
its
simplicity
can
be
appreciated
by
comparing
the
property
of
linearity (e.g.
f(x
+ y) =
f(x)
+
f(y))
with
common nonlinear
operators:
Jx
+ y
-:j:.
-/X
+
v:y,
sin
(x
+ y)
-:j:.
sin (x) +
sin (y), etc.
Example
3.10.
The operator defined by a matrix A E R
ffixn
via matrix-vector
multiplication,
f(x) =
Ax,
is linear; the reader should verify this
if
necessary (see Exercise 7). Moreover,
it
can
be
shown that every linear operator mapping Rn into Rffi can
be
represented
by
a
matrix
A E Rffixn
in
this way (see Exercise
8).
This explains why the study
of
(finite-dimensional) linear algebra is largely the study
of
matrices.
In
this
book,
matrices will
be
denoted by upper case boldface letters.
Example
3.11.
To
show that the sine function is
not
linear, we observe that
sin
(2i)
= sin
(7f)
= 0,
while
2sin(~)
=2·1=2.
Example
3.12.
Differentiation defines an operator
d~
: C
1
[a,
b]
-+
C[a,
b],
7The word "operator" is preferred over "function" in this context, because
the
vector spaces
themselves are often spaces
of
functions.
36
Chapter
3.
Essential
linear
algebra
and
this
operator
is
well
known
to be
linear.
For
example,
since
In
general,
the
kth
derivative
operator
defines
a
linear
operator
mapping
C
k
[a,
b
into
C[a,b].
This
is why
linearity
is so
important
in the
study
of
differential
equa-
tions.
Since
a
matrix
A
e
R
nxn
defines
a
linear operator
from
R
n
to
R
n
,
the
linear
system
Ax = b can be
regarded
as a
linear
operator
equation. From this point
of
view,
the
questions posed
by the
system are:
Is
there
a
vector
x G
R
n
whose image
under
A is the
given vector
b? If so, is
there only
one
such vector
x? In the
next
section,
we
will
explore these questions.
The
point
of
view
of a
linear operator equation
is
also
useful
in
discussing
differential
equations.
For
example, consider
the
steady-state heat
flow
problem
from
Section 2.1.
We
define
a
differential
operator
L
D
:
C|,[0,^]
->
C[Q,l]
by
Then
the BVP
(3.2)
is
equivalent
to the
operator equation
(the reader should notice
how the
Dirichlet boundary conditions
are
enforced
by
the
definition
of the
domain
of
LD).
This
and
similar examples
will
be
discussed
throughout this chapter
and in
detail
in
Section
5.1.
Exercises
1.
In
elementary algebra
and
calculus courses,
it is
often
said
that
/ : R
->•
R
is
linear
if and
only
if it has the
form
f(x)
— ax +
&,
where
a and b are
constants. Does this agree with
Definition
3.9?
If
not, what
is the
form
of a
linear
function
/ : R
—^
R?
2.
Show explicitly
that
/ : R
->
R
defined
by
f(x)
=
^/x
is not
linear.
3. For
each
of the
following
sets
of
functions, determine whether
or not it is a
vector space.
(Define
addition
and
scalar multiplication
in the
obvious way.)
If
it is
not,
state
what property
of a
vector space
fails
to
hold.
36
Chapter
3. Essential linear algebra
and this operator is well known to
be
linear. For example,
d~
[2
sin (x) - 3e
X
]
= 2 cos (x) - 3e
x
,
since
d~
[sin
(x)] = cos (x),
d~
[eX]
=
eX.
In
general, the
kth
derivative operator defines a linear operator mapping
Ck
[a,
b]
into C[a,
b].
This is why linearity is so important
in
the study
01
differential equa-
tions.
Since a matrix A E Rnxn defines a linear operator from
Rn
to
Rn,
the linear
system
Ax
= b can be regarded as a linear operator equation. From this point of
view, the questions posed by the system are: Is there a vector x
E Rn whose image
under A
is
the
given vector
b?
If
so,
is
there only one such vector x? In
the
next
section,
we
will explore these questions.
The point of view of a linear operator equation
is
also useful in discussing
differential equations. For example, consider
the
steady-state heat
flow
problem
(Pu
-/1,
ox
2
=
I(x),
0 < x <
C,
u(O)
= 0,
u(e)
= 0
from Section 2.1.
We
define a differential operator
LD
: C1[0,C]-+
C[O,C]
by
~u
LDu
=
-/1,
dx
2
'
Then
the
BVP (3.2)
is
equivalent
to
the operator equation
LDU=I
(3.2)
(the reader should notice how the Dirichlet boundary conditions are enforced by
the definition of the domain of
LD)'
This and similar examples will be discussed
throughout this chapter and in detail in Section 5.1.
Exercises
1.
In elementary algebra and calculus courses,
it
is
often said
that
1 : R
-+
R
is
linear if and only if
it
has the form
I(x)
=
ax
+
b,
where a and b are
constants. Does this agree with Definition 3.9?
If
not, what
is
the form of a
linear function
1 : R
-+
R?
2.
Show explicitly
that
1 : R
-+
R defined by
I(x)
=
v'x
is
not linear.
3.
For each of the following sets of functions, determine whether or not it
is
a
vector space. (Define addition and scalar multiplication in the obvious way.)
If
it
is
not,
state
what property of a vector space fails to hold.
3.1. Linear
systems
as
linear
operator equations
37
(d)
P
n
,
the set of all
polynomials
of
degree
n or
less.
(e)
The set of all
polynomials
of
degree exactly
n.
4.
Prove
that
the
differential
operator
L
:
C
l
[a,
b]
—>
C[a,
b]
defined
by
is
not a
linear operator.
5.
Prove
that
the
differential
operator
L
:
C
l
[a,b]
—>•
C[a,b]
defined
by
is
not a
linear operator.
6.
Prove
that
the
differential
operator
M
:
C
2
[a,
b]
—)•
<7[a,
b]
defined
by
is
a
linear operator.
7.
(a) Let A e
R
2x2
.
Prove
that
(Write
and
write
out
A(ax
+
/3y)
explicitly.)
(b)
Now
repeat
part
7a for A
e
R
nxn
.
The
proof
is not
difficult
when
one
uses summation notation.
For
example,
if the
(i,
j)-entry
of A is
denoted
aij,
then
Write
(A(ax
+
/?y))
i
and
(o:Ax
+
/5Ay)
i
in
summation notation,
and
show
that
the first can be
rewritten
as the
second using
the
elementary
properties
of
arithmetic.
3.1. Linear systems
as
linear operator equations
(a)
{J
E
C[O,
1]
: 1(0) =
O}
(b)
{J
E
C[O,
1]
: 1(0) = I}
(c)
{1
E
C[O,
1]
:
10
1
1(x)
dx
=
O}
(d) P
n
,
the set of all polynomials of degree n or less.
(e) The set of all polynomials of degree exactly
n.
4.
Prove
that
the
differential operator L : C
1
[a,
b]
-+
C[a,
b]
defined by
du
Lu=u-
dx
is
not a linear operator.
5.
Prove
that
the differential operator L : C
1
[a,
b]
-+
C[a,
b]
defined by
is
not a linear operator.
du 3
Lu
= -
+u
dx
6.
Prove
that
the differential operator M : C
2
[a,
b]
-+
C[a,
b]
defined by
is
a linear operator.
d
2
u du
Mu=
--2-+3u
dx
2
dx
7.
(a) Let A E R2x2. Prove
that
A(ax
+
f3y)
=
aAx
+ f3Ay for all a,f3 E
R,
X,y E R2.
(Write
and write out
A(ax
+
f3y)
explicitly.)
37
(b)
Now
repeat
part
7a for A E Rnxn. The proof
is
not difficult when one
uses summation notation. For example, if the
(i,
j)-entry
of A
is
denoted
aij,
then
n
(Ax)i = L
aijXj.
j=1
Write
(A
(ax +
f3Y))i
and
(aAx
+ f3AY)i in summation notation, and
show
that
the first can be rewritten as
the
second using the elementary
properties of arithmetic.