Gerya T. Introduction to Numerical Geodynamic Modelling
Подождите немного. Документ загружается.

15.2 3D staggered grid, discretisation of equations 227
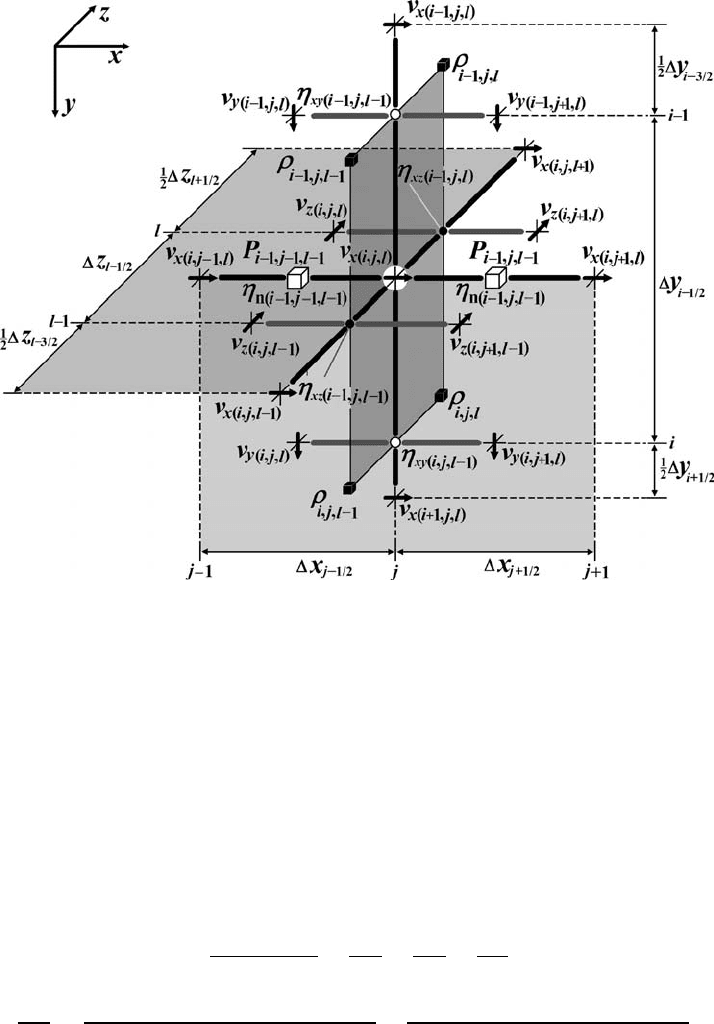
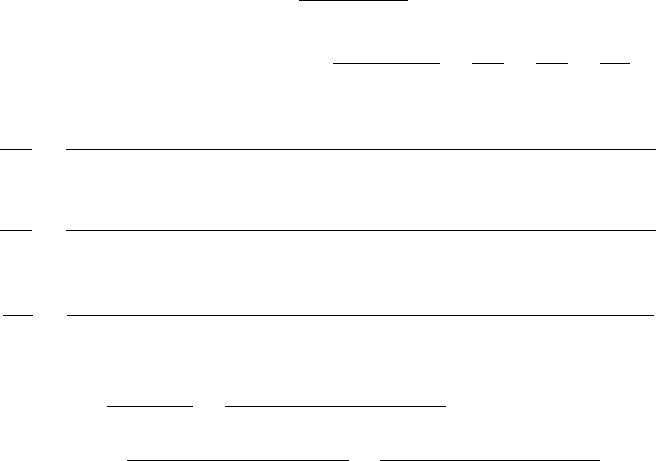
Fig. 15.5 Stencil of a 3D staggered grid used for the discretisation of the x-Stokes
equations with variable viscosity. The white circle in the centre corresponds
to a horizontal velocity node for which the x-Stokes equation is formulated.
The notation of different nodal points is as in Fig. 15.1. Indexing of different
variables corresponds to a 3D staggered grid with external velocity nodes
(Fig. 15.3).
Given that temperature advection is solved with markers (see Chapter 10),
discretisation of the 3D temperature equation with a variable thermal conductivity
can be done in a simple Lagrangian form, which does not include advective terms
and uses a stencil with 7 temperature nodes (7-point cross, Fig. 15.6). In implicit
form, the conservative FD can be written as follows
ρ
i,j,l
C
P
i,j,l
T
i,j,l
− T
o
i,j,l
t
+
∂q
x
∂x
+
∂q
y
∂y
+
∂q
z
∂z
= H
i,j,l
, (15.6)
∂q
x
∂x
=
(k
i,j−1,l
+ k
i,j,l
)(T
i,j,l
− T
(i,j−1,l)
)
x
j−1/2
(x
j−1/2
+ x
j+1/2
)
−
(k
i,j,l
+ k
i,j+1,l
)(T
i,j+1,l
− T
i,j,l
)
x
j+1/2
(x
j−1/2
+ x
j+1/2
)
,
(15.7)
228 Programming of 3D problems
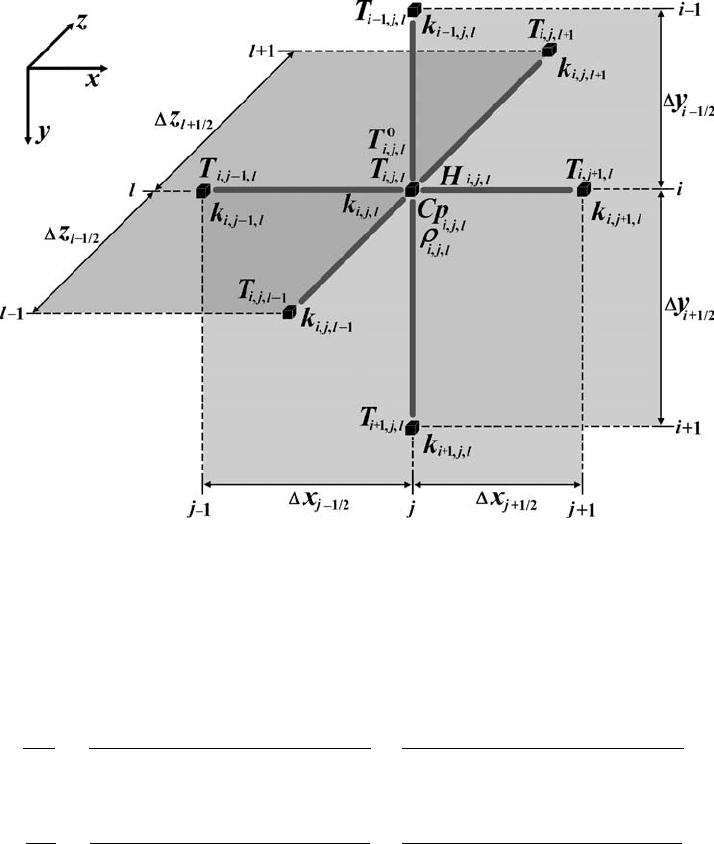
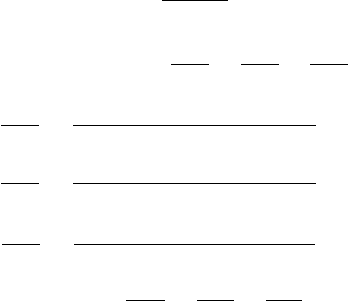
Fig. 15.6 Stencil of a 3D staggered grid used for discretisation of the temperature
equation with variable thermal conductivity. The temperature equation is formu-
lated for the central node T
i, j, l
which is one of the basic nodes of the 3D staggered
grid (Fig. 15.1). The notation of different nodal points is the same as in Fig. 15.1.
Indexing of different variables corresponds to a 3D staggered grid with external
velocity nodes (Fig. 15.3).
∂q
y
∂y
=
(k
i−1,j,l
+ k
i,j,l
)(T
i,j,l
− T
i−1,j,l
)
y
i−1/2
(y
i−1/2
+ y
i+1/2
)
−
(k
i,j,l
+ k
i+1,j,l
)(T
i+1,j,l
− T
i,j,l
)
y
i+1/2
(y
i−1/2
+ y
i+1/2
)
,
(15.8)
∂q
z
∂z
=
(k
i,j,l−1
+ k
i,j,l
)(T
i,j,l
− T
i,j,l−1
)
z
l−1/2
(z
l−1/2
+ z
l+1/2
)
−
(k
i,j,l
+ k
i,j,l+1
)(T
i,j,l+1
− T
i,j,l
)
z
l+1/2
(z
l−1/2
+ z
l+1/2
)
.
(15.9)
where T
o
i,j,l
is temperature for the current moment of time in the central ijl-th
node of the cross and T
i,j,l−1
, T
i,j,l+1
, etc. are temperatures in 7 nodal points
for the next moment of time, k
i,j,l−1
, k
i,j,l+1
, etc. stand for thermal conductivity
that can be different at different nodes, ρ
i,j,l
,C
P i,j,l
, and H
i,j,l
is density, iso-
baric heat capacity and heat production values for the central node of the cross,
respectively.
15.2 3D staggered grid, discretisation of equations 229
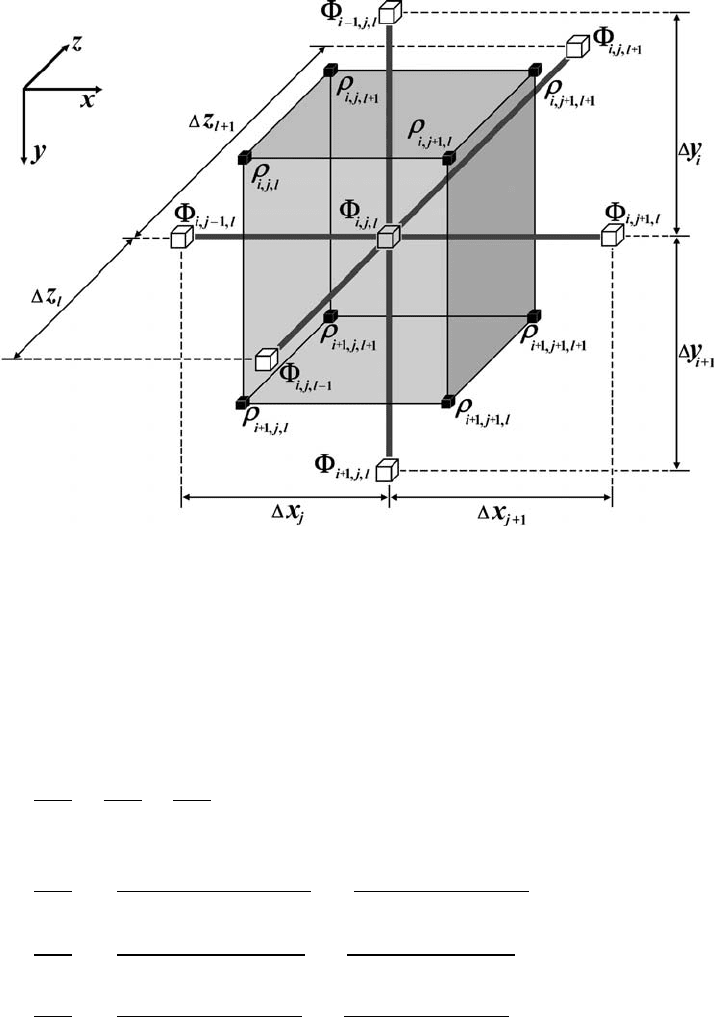
Fig. 15.7 Stencil of a 3D staggered grid used for the discretisation of the Poisson
equation. The Poisson equation is formulated for the central node
i,j,l
located
in one of the cell centres (pressure nodes) of the 3D staggered grid (Fig. 15.1).
The notation of different nodal points is the same as in Fig. 15.1. Indexing of
different variables corresponds to 3D staggered grid with external velocity nodes
(Fig. 15.3).
Like for the temperature equation, the discretisation of the Poisson equation in
3D is also based on a 7-point cross (Fig. 15.7)
∂
2
∂x
2
+
∂
2
∂y
2
+
∂
2
∂z
2
= πG(ρ
i,j,l
+ ρ
i+1,j,l
+ ρ
i,j+1,l
+ ρ
i+1,j +1,l
+ ρ
i,j,l+1
+ρ
i+1,j,l+1
+ ρ
i,j+1,l+1
+ ρ
i+1,j +1,l+1
)/2, (15.10)
∂
2
∂x
2
= 2
i,j+1,l
−
i,j,l
x
j+1
(x
j
+ x
j+1
)
− 2
i,j,l
−
i,j−1,l
x
j
(x
j
+ x
j+1
)
, (15.11)
∂
2
∂y
2
= 2
i+1,j,l)
−
i,j,l
y
i+1
(
y
i
+ y
i+1
)
− 2
i,j,l
−
i−1,j,l
y
i
(
y
i
+ y
i+1
)
, (15.12)
∂
2
∂z
2
= 2
i,j,l+1
−
i,j,l
z
l+1
(
z
l
+ z
l+1
)
− 2
i,j,l
−
i,j,l−1
z
l
(
z
l
+ z
l+1
)
. (15.13)
The density at the central node of the cross in Eq. (15.10) is computed as an
arithmetic average from 8 surrounding basic nodes. Alternatively, additional density
230 Programming of 3D problems
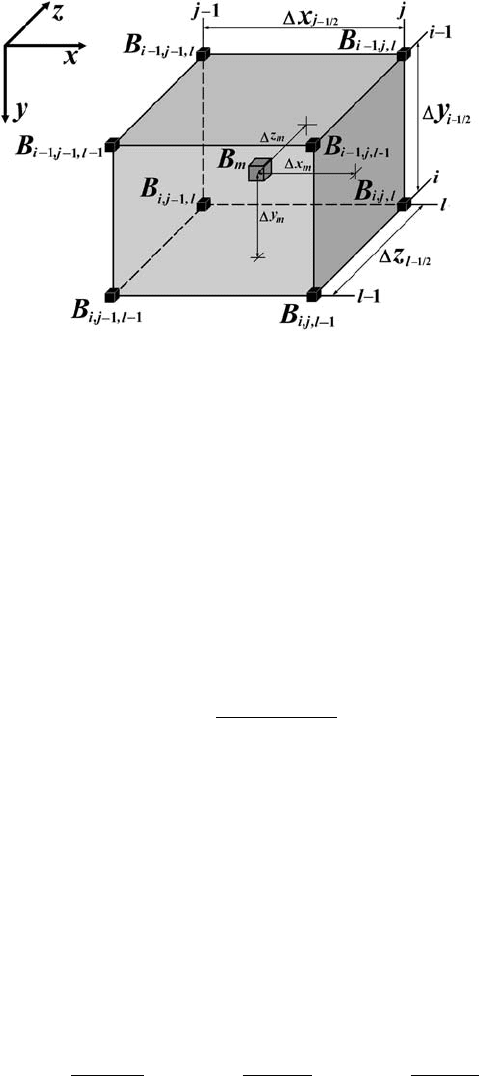
Fig. 15.8 Stencil of a 3D grid (8-nodes cell) used for the interpolation between
marker (grey cube) and nodes (black cubes).
points can be defined in the same gravity potential nodes (i.e. in the centre of cells,
Fig. 15.1) and respective density values can be separately interpolated from markers
when deformation of self-gravitating body is modelled in 3D.
Finally, interpolation between markers and nodes in 3D is also based on the
same principles as those discussed for 2D interpolation in Chapter 8. It can be done
with the following standard first-order of accuracy trilinear interpolation schemes
(Fig. 15.8): interpolation to ijl-th node from markers found in 8 cells surrounding
this node
B
(i,j,l)
=
m
B
m
w
m(i,j,l)
m
w
m(i,j,l)
, (15.14)
interpolation to a marker in a cell from 8 nodes surrounding the cell
B
m
= B
i,j,l
w
m(i,j,l)
+ B
i−1,j,l
w
m(i−1,j,l)
+ B
i,j−1,l
w
m(i,j−1,l)
+B
i−1,j −1,l
w
m(i−1,j −1,l)
+ B
i,j,l−1
w
mi,j,l−1
+ B
i−1,j,l−1
w
mi−1,j,l−1
+B
i,j−1,l−1
w
mi,j−1,l−1
+ B
i−1,j −1,l−1
w
mi−1,j −1,l−1
, (15.15)
where the statistical weight of m-th-marker for ijl-th-node depends on x
m
, y
m
,
z
m
distances to this nodes as
w
m(i,j,l)
=
1 −
x
m
x
j−1/2
×
1 −
y
m
y
i−1/2
×
1 −
z
m
z
l−1/2
. (15.16)
15.3 Solving discretised equations 231
15.3 Solving discretised 3D equations
After discussing discretisation of variable equations required for thermomechanical
geodynamic modelling in 3D, let us consider methods for solving these equations.
All approaches considered are iterative.
Temperature equation. Efficient solving of the non-steady 3D temperature equa-
tion (15.6) does not require a multigrid since, in contrast to steady Stokes and Pois-
son equations, the time-dependent solutions for temperature are controlled locally
by local heat fluxes rather than globally and can be implemented on the basis of a
Gauss–Seidel iteration with a relatively high relaxation parameter θ
temperature
relaxation
that
ranges from 0.5 to 1.5. The respective iterative temperature update scheme for a
regularly spaced grid based on Eqs. (15.6)−(15.9)isasfollows
T
new
i,j,l
= T
i,j,l
+
R
temperature
i,j,l
C
T (i,j,l)
θ
temperature
relaxation
, (15.17)
R
temperature
i,j,l
= H
i,j,l
− ρ
i,j,l
C
P i,j,l
T
i,j,l
− T
o
i,j,l
t
−
∂q
x
∂x
−
∂q
y
∂y
−
∂q
z
∂z
,
(15.18)
∂q
x
∂x
=
(k
i,j,l
+ k
i,j−1,l
)(T
i,j,l
− T
i,j−1,l
) − (k
i,j+1,l
+ k
i,j,l
)(T
i,j+1,l
− T
i,j,l
)
2x
2
,
(15.19)
∂q
y
∂y
=
(k
i,j,l
+ k
i−1,j,l
)(T
i,j,l
− T
i−1,j,l
) − (k
i+1,j,l
+ k
i,j,l
)(T
i+1,j,l
− T
i,j,l
)
2y
2
,
(15.20)
∂q
z
∂z
=
(k
i,j,l
+ k
i,j,l−1
)(T
i,j,l
− T
i,j,l−1
) − (k
i,j,l+1
+ k
i,j,l
)(T
i,j,l+1
− T
i,j,l
)
2z
2
,
(15.21)
C
T (i,j,l)
=
ρ
i,j,l
C
P
i,j,l
t
+
k
i,j−1,l
+ 2k
i,j,l
+ k
i,j+1,l
2x
2
+
k
i−1,j,l
+ 2k
i,j,l
+ k
i+1,j,l
2y
2
+
k
i,j,l−1
+ 2k
i,j,l
+ k
i,j,l+1
2z
2
, (15.22)
where x, y,andz are regular grid steps in respective directions, T
o
i,j,l
is the
temperature at the ijl-th node for the current moment of time, T
i,j,l
and T
new
i,j,l
are
old and new (updated) values of temperature at the ijl-th node for the next moment
of time. To satisfy the boundary condition equations, these equations are called for
marginal temperature nodes in the same Gauss–Seidel iteration cycle
upper boundary (i = 1)
no vertical heat flux T
i=1,j,l
= T
i=2,j,l
constant temperature T
i=1,j,l
= T
top
232 Programming of 3D problems
left boundary (j = 1)
no horizontal heat flux T
i,j=1,l
= T
i,j=2,l
constant temperature T
i,j=1,l
= T
left
front boundary (l = 1)
no lateral heat flux T
i,j,l=1
= T
i,j,l=2
constant temperature T
i,j,l=1
= T
front
etc. for other boundaries. An example implementation of above algorithm is given
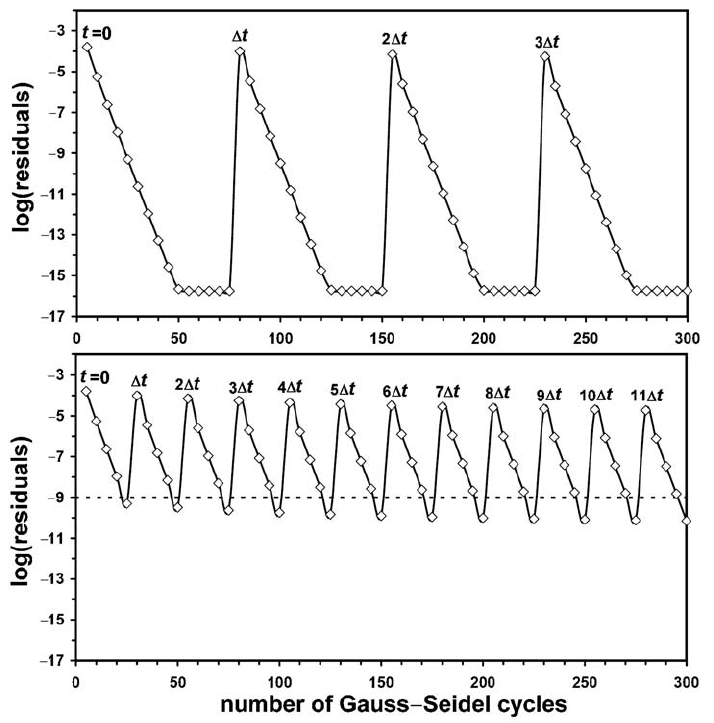
in the program Temperature3D_Gauss_Seidel.m. As can be seen from Fig. 15.9,
Gauss–Seidel iterations allow us to obtain high-accuracy solutions with 10–20
iterations per time step while the computer accuracy solution is obtained with a
few tens of iterations.
Poisson equation.Likein2D(Chapter 14), the efficient solving of the 3D Pois-
son equation (15.10) can be based on a multigrid approach, that can again be
implemented on the basis of Gauss–Seidel iterations with a relatively high relax-
ation parameter θ
Poisson
relaxation
ranging from 0.5 to 1.5. The respective iterative gravity
potential update scheme for regularly spaced grid based on Eqs. (15.10)−(15.13)
is as follows
new
i,j,l
=
i,j,l
+
R
i,j,l
C
(i,j,l)
θ
Poisson
relaxation
, (15.23)
R
Poisson
i,j,l
= R
Poisson
i,j,l
−
∂
2
∂x
2
−
∂
2
∂y
2
−
∂
2
∂z
2
, (15.24)
∂
2
∂x
2
=
i,j−1,l
− 2
i,j,l
+
i,j+1,l
x
2
, (15.25)
∂
2
∂y
2
=
i−1,j,l
− 2
i,j,l
+
i+1,j,l
y
2
, (15.26)
∂
2
∂z
2
=
i,j,l−1
− 2
i,j,l
+
i,j,l+1
z
2
. (15.27)
C
(i,j,l)
=−
2
x
2
−
2
y
2
−
2
z
2
, (15.28)
i,j−1,l
,
i−1,j,l
, etc. are current values of either gravity potential (at finest level) or
corrections for this potential (at coarser levels) at respective nodal points, C
(i,j,l)
is the coefficient at
i,j,l
in the discretised Poisson equation, R
i,j,l
is the current
residual and R
i,j,l
is the right-hand side of the Poisson equation. On the finest
principal level of resolution, the right-hand side is computed from the standard
equation
R
i,j,l
= 4πGρ
i,j,l
, (15.29)
15.3 Solving discretised equations 233
(a)
(b)
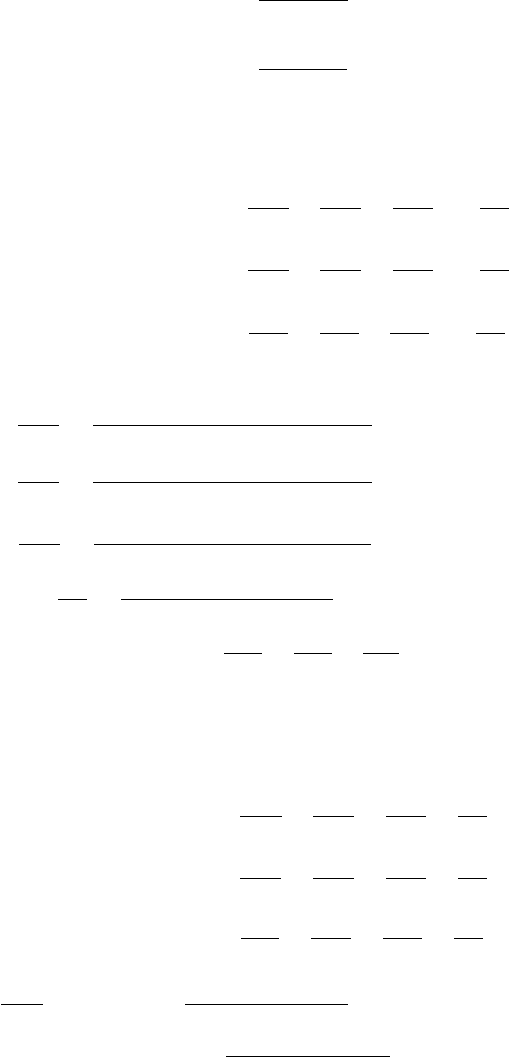
Fig. 15.9 Decay of normalised residuals for the temperature equations with the
number of Gauss–Seidel cycles for a 3D model with variable thermal conductivity.
Residuals in (a) stabilise at computer accuracy level (10
−16
) after around 50
iterations (per time step). Iterations in (b) are terminated after reaching given level
of tolerance (10
−9
) that takes around 25 iterations per time step. Model resolution is
51 ×51 ×51 points with regularly spaced grid. Relaxation parameter θ
temperature
relaxation
=
1.25 is used (in Eq. 15.17). Numerical setup: rectangular block having higher
temperature is placed in lower temperature surrounding. Results are obtained with
program Temperature3D_Gauss_Seidel.m.
where G is the gravitational constant and ρ
i,j,l
the density defined at the same
location as
i,j,l
(alternatively use Eq. (15.10) when the gravity potential and
density are defined at different points). For coarser levels, R
i,j,l
is composed of
residuals interpolated from finer levels. Obviously, grid steps x, y and z are
different at different levels of resolution. Various boundary conditions are defined
234 Programming of 3D problems
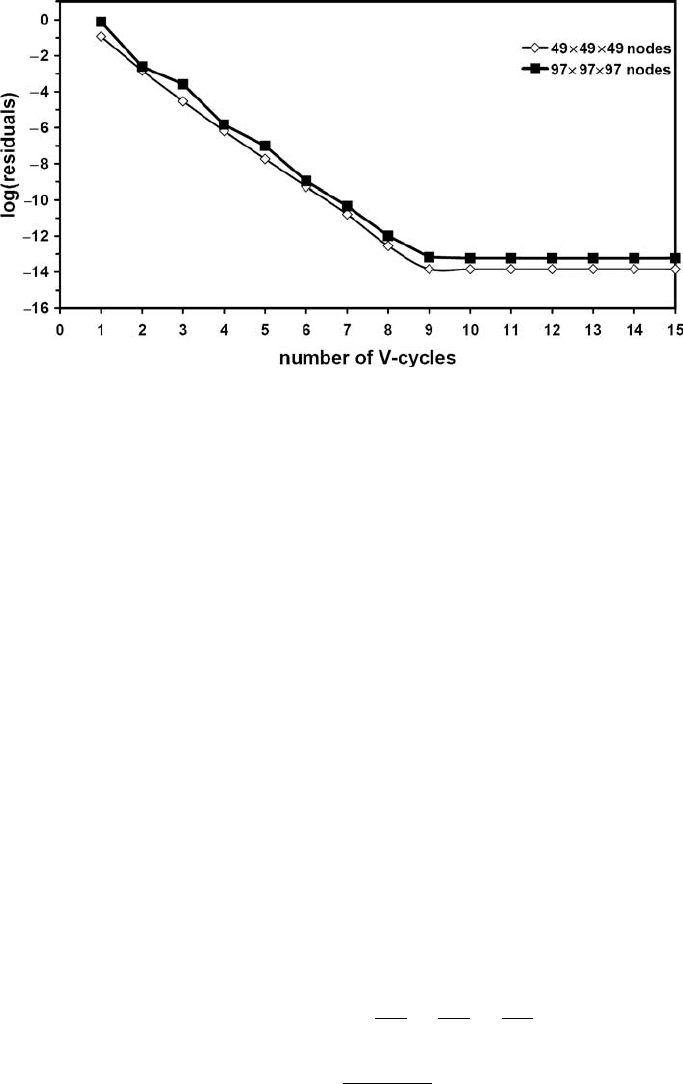
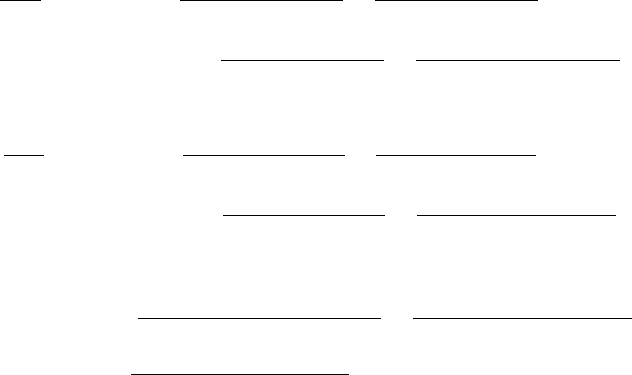
Fig. 15.10 Decay of normalised residuals for the 3D Poisson equation at various
resolutions versus number of multigrid V-cycles for a model with a spherical planet
embedded in a mass less medium (space). Residuals stabilise at computer accuracy
level. 5- and 6-level multigrid with resolutions respectively 49 ×49 ×49 (open
diamonds) and 97 × 97 ×97 (solid squares) nodes on the finest level are used
with a relaxation parameter θ
Poisson
relaxation
= 1.5. Results are obtained with program
Poisson3D_Multigrid_planet_arbitrary.m.
as in 2D (see Fig. 14.7,Eqs.(14.12)–(14.16)). An example implementation of
the above algorithm, for the case of a self-gravitating planet and gravity potential
boundary condition defined on the internal spherical surface inside the grid is given
in the program Poisson3D_Multigrid_planet_arbitrary.m. As can be seen from
Fig. 15.10, multigrid allows us to obtain computer accuracy within around 10
V-cycles independent of the model resolution.
Momentum and continuity equations.Asin2D(Chapter 14), the efficient solu-
tion of the 3D Stokes and continuity equations (15.1)−(15.5) can be based on a
multigrid approach that can be implemented on the basis of Gauss–Seidel iterations
with pressure updates computed from local divergence scaled to local viscosity. The
respective iterative pressure and velocity update schemes for a regularly spaced
grid can be derived on the basis of Eqs. (15.1)–(15.5)
P
new
i,j,l
= P
i,j,l
+ η
n(i,j,l)
R
continuity
i,j,l
θ
continuity
relaxation
, (15.30)
R
continuity
i,j,l
= R
continuity
i,j,l
−
∂v
x
∂x
−
∂v
y
∂y
−
∂v
z
∂z
, (15.31)
v
new
x(i,j,l)
= v
x(i,j,l)
+
R
x-Stokes
i,j,l
C
v
x
(i,j,l)
θ
Stokes
relaxation
, (15.32)
15.3 Solving discretised equations 235
v
new
y(i,j,l)
= v
y(i,j,l)
+
R
y-Stokes
i,j,l
C
v
y
(i,j,l)
θ
Stokes
relaxation
, (15.33)
v
new
z(i,j,l)
= v
z(i,j,l)
+
R
z-Stokes
i,j,l
C
v
z
(i,j,l)
θ
Stokes
relaxation
. (15.34)
For models with constant viscosity η, the respective residuals and coefficients in
Eqs. (15.30)−(15.34) become
R
x-Stokes
i,j,l
= R
x-Stokes
i,j,l
− η
∂
2
v
x
∂x
2
+
∂
2
v
x
∂y
2
+
∂
2
v
x
∂z
2
+
∂P
∂x
, (15.35)
R
y-Stokes
i,j,l
= R
y-Stokes
i,j,l
− η
∂
2
v
y
∂x
2
+
∂
2
v
y
∂y
2
+
∂
2
v
y
∂z
2
+
∂P
∂y
, (15.36)
R
z-Stokes
i,j,l
= R
z-Stokes
i,j,l
− η
∂
2
v
z
∂x
2
+
∂
2
v
z
∂y
2
+
∂
2
v
z
∂z
2
+
∂P
∂z
, (15.37)
η
n(i,j,l)
= η, (15.38)
∂
2
v
x
∂x
2
=
v
x(i,j−1,l)
− 2v
x(i,j,l)
+ v
x(i,j+1,l)
x
2
, (Fig. 15.5) (15.39)
∂
2
v
x
∂y
2
=
v
x(i−1,j,l)
− 2v
x(i,j,l)
+ v
x(i+1,j,l)
y
2
, (Fig. 15.5) (15.40)
∂
2
v
x
∂z
2
=
v
x(i,j,l−1)
− 2v
x(i,j,l)
+ v
x(i,j,l+1)
z
2
, (Fig. 15.5) (15.41)
∂P
∂x
=
P
i−1,j,l−1
− P
i−1,j −1,l−1
x
, (Fig. 15.5) (15.42)
C
v
x
(i,j,l)
=−
2η
x
2
−
2η
y
2
−
2η
z
2
, (15.43)
and other terms can be derived in a similar manner (derive as an exercise).
For models with variable viscosity, the respective residuals and coefficients in
Eqs. (15.32)–(15.34) become
R
x-Stokes
i,j,l
= R
x-Stokes
i,j,l
−
∂σ
xx
∂x
−
∂σ
xy
∂y
−
∂σ
xz
∂z
+
∂P
∂x
, (15.44)
R
y-Stokes
i,j,l
= R
y-Stokes
i,j,l
−
∂σ
yy
∂y
−
∂σ
yx
∂x
−
∂σ
yz
∂z
+
∂P
∂y
, (15.45)
R
z-Stokes
i,j,l
= R
z-Stokes
i,j,l
−
∂σ
zz
∂z
−
∂σ
zx
∂x
−
∂σ
zy
∂y
+
∂P
∂z
, (15.46)
∂σ
xx
∂x
= 2η
n(i−1,j,l−1)
v
x(i,j+1,l)
− v
x(i,j,l)
x
2
−2η
n(i−1,j −1,l−1)
v
x(i,j,l)
− v
x(i,j−1,l)
x
2
, (Fig. 15.5) (15.47)
236 Programming of 3D problems
∂σ
xy
∂y
= η
xy(i,j,l−1)
v
x(i+1,j,l)
− v
x(i,j,l)
y
2
+
v
y(i,j+1,l)
− v
y(i,j,l)
yx
−η
xy(i−1,j,l−1)
v
x(i,j,l)
− v
x(i−1,j,l)
y
2
+
v
y(i−1,j +1,l)
− v
y(i−1,j,l)
yx
,
(Fig. 15.5) (15.48)
∂σ
xz
∂z
= η
xz(i−1,j,l)
v
x(i,j,l+1)
− v
x(i,j,l)
z
2
+
v
z(i,j+1,l)
− v
z(i,j,l)
zx
−η
xz(i−1,j,l−1)
v
x(i,j,l)
− v
x(i,j,l−1)
z
2
+
v
z(i,j+1,l−1)
− v
z(i,j,l−1)
zx
,
(Fig. 15.5) (15.49)
C
v
x
(i,j,l)
=−2
η
n(i−1,j,l−1)
+ η
n(i−1,j −1,l−1)
x
2
−
η
xy(i,j,l−1)
+ η
xy(i−1,j,l−1)
y
2
−
η
xz(i−1,j,l)
+ η
xz(i−1,j,l−1)
z
2
, (15.50)
and other terms can be derived similarly (derive as an exercise).
The methodology of using a multigrid approach for 3D models is the same
as in 2D cases, with the single difference that trilinear (Eqs. (15.14)–(15.16))
and not bilinear interpolation schemes should be used to construct the restriction
and prolongation operations. Example implementations of the above algorithm
for the case of constant and variable viscosity are given respectively in the programs,
Stokes_Continuity3D_Multigrid.m, Variable_viscosity3D_Multigrid.m and
Variable_viscosity3D_MultiMultigrid.m associated with this chapter. As can
be seen from Figs. 15.11, 15.12, multigrid allows us to obtain high-accuracy 3D
mechanical solutions at various viscosity contrasts. In the case of large viscos-
ity contrasts, a computer accuracy solution can often be obtained with a ‘multi-
multigrid’ approach (Fig. 15.12) using repetitive cycles of gradual increase in a
computational viscosity contrast, as described in Chapter 14.
Elastic stress rotation. 3D numerical models including elasticity should take
into account the elastic stress rotation (Chapter 12). One possible way is to use the
general form of Jaumann stress rate (see Eqs. (12.29)–(12.36)), which allows us
to compute the rate of change caused by rotation for various stress components
˙σ
ij(Jaumann)
= σ
ik
ω
kj
− ω
ik
σ
kj
, (15.51)
where ˙σ
ij(Jaumann)
is rate of change for the σ
ij
deviatoric stress components, repeated
index k indicates summation and ω
kj
, ω
ik
are components of the anti-symmetric
rotation rate tensor (Eq. (12.29)). Using Eq. (15.51) in 3D for e.g. σ
xx
, the deviatoric
stress component gives (see Eq. (12.31))
˙σ
xx(Jaumann)
= 2σ
xy
ω
yx
+ 2σ
xz
ω
zx
. (15.52)