Genshiro Kitagawa. Introduction to Time Series Modeling (Введение в моделирование временных рядов)
Подождите немного. Документ загружается.


PRE-PROCESSING OF TIME SERIES 9
1.4.1 Transformation of variables
Some types of time series obtained by counting numbers or by measur-
ing a positive-valued process, such as the prices of goods and numbers of
people illustrated in Figures 1.1(e) and 1.1(g), share the common chara c-
teristic that the variance of the series increases as the level o f the series
increases. For such a situation, we may construct a new series whose
variance is almost time-invariant and whose noise distribution is closer
to the normal distribution by using the log-transformation z
n
= logy
n
instead of the original series y
n
.
A more general Box-Cox transformation (Box and Cox (1964)) in-
cludes the log -transformation as a special case and the automatic deter-
mination of its parameter will be considered later in Section 4.8. For
time series y
n
that take values in (0,1) like probabilities or ratios of the
occurre nce of a cer tain phenomenon, we can obtain a time series z
n
that
takes a value in (−∞,∞) by the logit transformation
z
n
= log
y
n
1 −y
n
. (1.1)
In many cases, the distribution of the transformed time series z
n
is
less distorted than the original time series y
n
, thus the modeling of the
transformed series might be mo re tractable.
1.4.2 Differe ncing
When a time ser ie s y
n
contains a trend as seen in Figures 1.1(c), (e) and
(g), we might stu dy the differenced series z
n
defined by (Box and Jenkins
(1970))
z
n
= ∆y
n
= y
n
−y
n−1
. (1.2)
This is motivated by the fact that, when y
n
is a straight line expressed as
y
n
= a + bn, then the differenced series z
n
becomes a constant as
z
n
= ∆y
n
= b, (1.3)
and the slope of the stra ight line can be removed.
Moreover, if y
n
is a parabola and expressed by y
n
= a + bn + cn
2
,
then the difference of z
n
becomes a constant and a and b are removed as
follows
∆z
n
= z
n
−z
n−1
10 INTRODUCTION AND PREPARATORY ANALYSIS
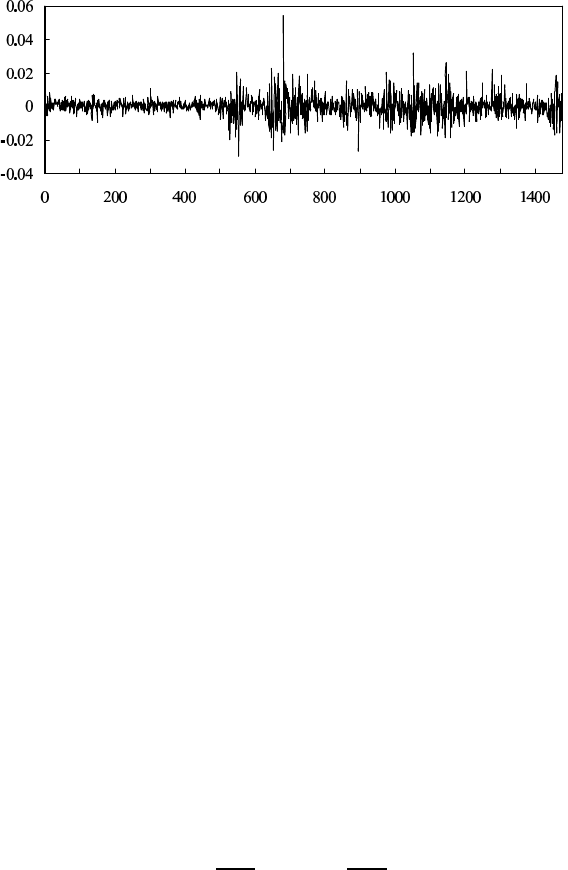
Figure 1.2: Difference of the logarithm of the Ni kkei 225 data.
= ∆y
n
−∆y
n−1
= (b + 2cn) −(b + 2c(n −1))
= 2c. (1.4)
When an annual cycle is observed in time series as shown in Figure
1.1(e), we m ight use the difference between the time series at the present
time and one cycle before defined by
∆
p
y
n
= y
n
−y
n−p
. (1.5)
Figure 1.2 shows the difference of the loga rithm r
n
= logy
n
−
logy
n−1
of the Nikkei 225 data depicted in Figure 1.1( g), which is fre-
quently utilized in the analysis of financial data in Japan. From Fig -
ure 1.2, it can be seen that the dispersion of the variation has changed
abruptly around n = 500. We shall discuss this phenomenon in detail
later in Sections 13.1 and 14.5.
1.4.3 Change from the previous month (quarter) and annual change
For economic time series as shown in Figure 1.1(e), we often consider
a change from the previous month (o r quarter) and an annual c hange of
the original series y
n
defined by
z
n
=
y
n
y
n−1
, x
n
=
y
n
y
n−p
. (1.6)
If the time series y
n
is represented as the product of the trend T
n
and
the noise w
n
as
y
n
= T
n
w
n
, (1.7)
PRE-PROCESSING OF TIME SERIES 11
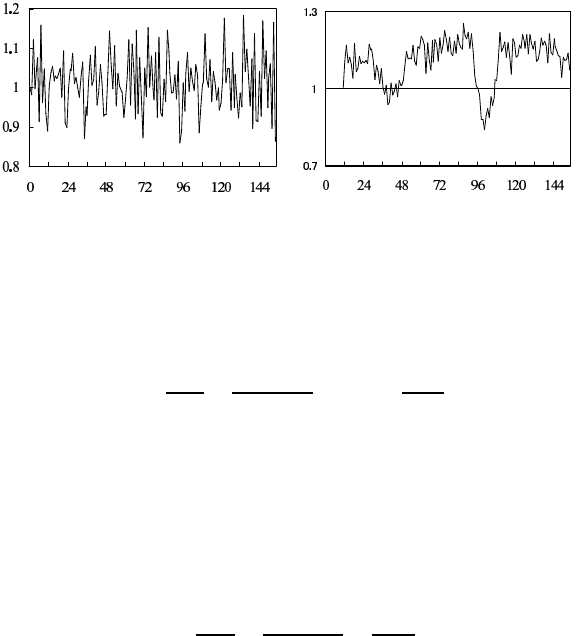
Figure 1.3 Change from previous month and year-over-year change of WHARD
data.
and T
n
evolves as T
n
= (1 +
α
)T
n−1
, where
α
is the growth rate, then the
change from the previous month can be expressed by
z
n
=
y
n
y
n−1
=
T
n
w
n
T
n−1
w
n−1
= (1 +
α
)
w
n
w
n−1
. (1.8)
This means that, if the noise can be disregarded, the growth rate
α
can
be determin ed by this transformation.
On the other hand, if y
n
is represented as the product of a periodic
function s
n
with the cycle p and the noise w
n
,
y
n
= s
n
·w
n
, s
n
= s
n−p
(1.9)
then the annual changes x
n
can be expr essed by
x
n
=
y
n
y
n−p
=
s
n
w
n
s
n−p
w
n−p
=
w
n
w
n−p
. (1.10)
This suggests that the periodic function is removed by this transforma-
tion.
Figure 1.3 shows the change from the previous mon th and the annual
change of the WHARD d ata shown in Figure 1.1(e). The trend compo-
nent is rem oved by the change fr om the previous month. On the other
hand, the annual periodic component is removed by the annual change.
By me ans of this transformation, significant drops a re revealed in the
vicinity of n = 40 and n = 100.
1.4.4 Moving average
Constructing a moving average is a simple method for smoothing time
series with random fluctuations. For a time series y
n
, the (2k +1)-th te rm
12 INTRODUCTION AND PREPARATORY ANALYSIS
moving average of y
n
is defined by
T
n
=
1
2k + 1
k
∑
j=−k
y
n+ j
. (1.11)
When th e original time series is represented by the sum of the straight
line t
n
and the noise w
n
as
y
n
= t
n
+ w
n
, t
n
= a + bn, (1.12)
where w
n
is an independent noise with mean 0 and variance
σ
2
, then the
moving average is given by
T
n
= t
n
+
1
2k + 1
k
∑
j=−k
w
n+ j
. (1.13)
Here, since the sum of the indepe ndent noises satisfies
E
k
∑
j=−k
w
n+ j
=
k
∑
j=−k
E[w
n+ j
] = 0,
E
k
∑
j=−k
w
n+ j
2
=
k
∑
j=−k
E
h
(w
n+ j
)
2
i
= (2k + 1)
σ
2
. (1.14)
Hence
Var
1
2k + 1
k
∑
j=−k
w
n+ j
=
σ
2
2k + 1
. (1.15)
This shows that the mean of the moving average T
n
is the same as that
of t
n
, and the variance is reduced to 1/(2k + 1) of the variance of no ise
term w
n
.
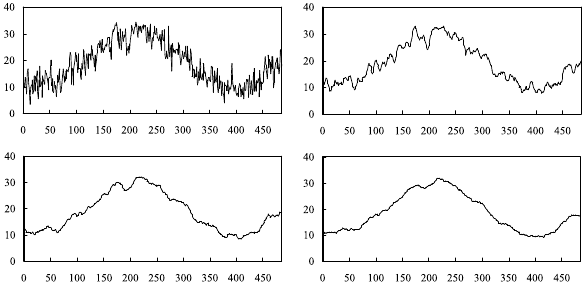
Figure 1.4 shows the original maximum temperatu re data in Figure
1.1(c) an d its moving averages for k = 5,17 and 29. It can be seen that
the moving averages yield smoother curves as k b ecomes larger.
In general, the weighted moving average is defined by
T
n
=
k
∑
j=−k
w
j
y
n−j
, (1.1 6)
where the weights satisfy
k
∑
j=−k
w
j
= 1 and w
j
≥ 0.
ORGANIZATION OF THIS BOOK 13
Figure 1.4 Maximum temperature data and its moving average. Top l eft: original
data, t op right: moving average wi th k = 5, bottom left: k = 17, bottom right:
k = 29.
If we modify the definition of a moving average by using the median
instead of the average, we obtain the (2k + 1)-th term moving median
that is defined by
T
n
= media n {T
n−k
,···, T
n
,···, T
n+k
}. (1.17)
The moving median can detect a change in the tren d more quickly than
can the moving average.
1.5 Organization of This Book
The main aim of this book is to provide basic tools for modeling vari-
ous time ser ies that arise for real-world problems. Chapters 2 and 3 are
basic chapters and introduce two descriptive a pproaches. I n chapter 2,
the autocovariance and autocorrelation functions are introduced as basic
tools to describe univariate stationary time series. The cross-covariance
and cross-co rrelation functions are also introduced for multivariate time
series. I n Chapter 3, the spectrum and the p e riodogram are introduced as
basic tools for th e frequen cy domain analysis of station ary time series.
For the multivariate case, the cross spectrum and the power contribution
are also introduced.
Chapters 4 and 5 discuss the basic metho ds for statistical model-
ing. I n Chapter 4, typic al probability distributions are introduced. Th en,
14 INTRODUCTION AND PREPARATORY ANALYSIS
based on the entropy maximization pr inciple, the likelihood function, the
maximum likelihood metho d and the AIC cr iterion are der ived. In Chap-
ter 5, under the assumption of linearity and normality o f the noise, the
least squares method is derived as a convenient method for fitting various
statistical models.
Chapters 6 to 8 a re concerned with ARMA and AR models. In Chap-
ter 6, the ARMA model is introduced and the impulse response func-
tion, the autocovariance function, partial autocorrelation coefficients, the
power spectrum and characteristic roots a re derived from the ARMA
model. The multivariate AR model is also considered in this chapter and
the cross-spectru m and power contribution are derived. The Yule-Walker
method and the least squares method for fitting an AR mo del are shown
in Ch apter 7. In Chapter 8, the AR model is extended to the case wh ere
the time series is piecewise stationary and an application of the model to
the automatic determination of the change point o f a time series is given.
Chapter 9 introduces the state-space model as a unified way of ex-
pressing stationary and nonstationary time series models. The Kalman
filter and smooth er are shown to provide the conditional mean and vari-
ance of th e unknown state vector, given the observations. It is also shown
that we ca n get a unified method for prediction, interpolation and param -
eter estimation by using the state-space model and the Kalman filter.
Chapters 10 to 13 show examples of the application of the state-
space model. In Chapter 10, the exact maximum likelihood method for
the ARMA m odel is shown. The trend mode ls are introduced in Chapter
11. In Chapter 12, the seasonal adjustment model is introduced to de-
compose season al time series into several components such as the trend
and seasonal com ponents. Ch apter 13 is concerned with the modeling of
nonstationarity in the variance and covariance. Time-varying coefficient
AR m odels are introduced and applied to the estimation of a changing
spectrum.
Chapters 14 a nd 15 are concerned with nonlinear no n-Gaussian state-
space models. In Chap te r 14, th e non-G a ussian state-space model is in-
troduced a nd a non-Gaussian filter an d smo other are derived f or state
estimation. Applications to the detection of sudden changes of the trend
component and other examples ar e p resented. In Chapter 15, the Monte
Carlo filter and smoother are introduced as a very flexible method of fil-
tering and smoothing for very general nonlinear non-Gaussian models.
Chapter 16 shows methods for g enerating various random numbe rs
and time series that follow an arbitrarily specified time serie s model.
Algorithms for nonlinear optimizatio n and the Mo nte Calro fil-
ORGANIZATION OF THIS BOOK 15
ter/smoother and the derivations of the Levinson’s algorithm and the
Kalman filter are shown in Appendice s.
Problems
1. Wh a t is necessary to c onsider when discretizing a continu ous tim e
series?
2. Give an example of a non-Gaussian time series and describe its char-
acteristics.
3.(1) Obtain the inverse transformation of the logit transformation (1.1).
(2) Find a transformation fro m (a,b) to (−∞,∞) and find its inverse.
4. Describe the problem in constructing a statio nary time series from a
nonstationary time series by differencing.
5. Describe the problem in removing cyclic compo nents by annual
changes.
6.(1) Show that if the true trend is a straight line, then the mean value
does not change for the three-term movin g average, and that the
variance bec omes 1/3 of the observed data variance.
(2) Discuss the differences between the char a cteristics of the moving
average filter and the moving median filter.
Chapter 2
The Covariance F unction
In this chapter, the covariance and correlation functions are presented
as basic methods to represent stationary time series. The autocovariance
function is a tool to represent the relation between past and present val-
ues of time series and the cross-covariance function is to express the
relation between two time series. T hese covariance functions are used to
capture features of time series to estimate the spectrum and to build time
series mode ls.
2.1 The Distribution of Time Series and Stationarity
The mean and the variance of data are fr equently used as basic statistics
to capture characteristics of ra ndom phenomena. A histogram is used to
represent ro ugh features of the data distribution. Therefore, by obtaining
the mean, the variance and the histogram, it is expected to capture some
aspects or features of th e data.
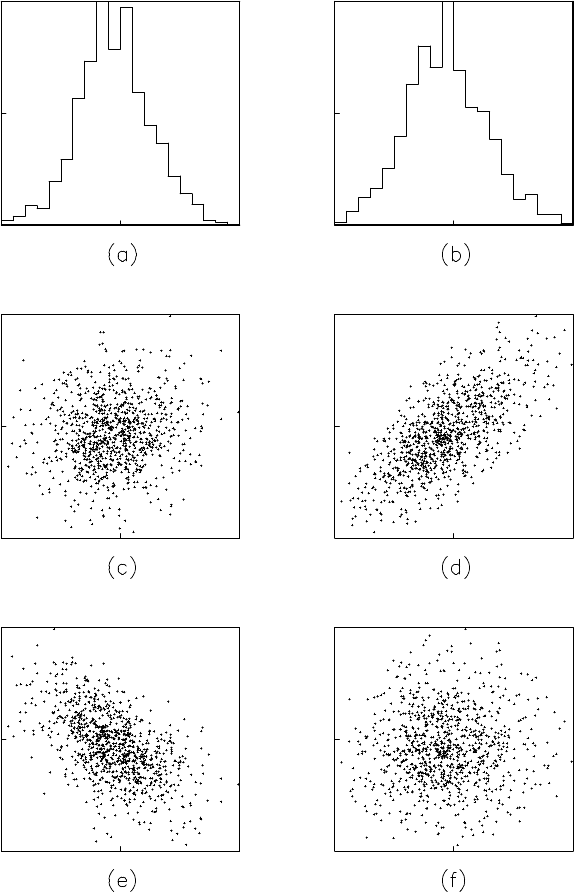
Accordingly, we shall investigate whether these statistics are useful
for the analysis of time series. The upper plots (a) and (b) in Figure 2.1
illustrate the histograms of the two time series (a) a ship’s yaw r ate a nd
(i) the ship’s rolling as shown in Figure 1.1. However, although the time
series in plot (a) of Figure 1.1 is apparently different from tha t in plot
(i) of Figu re 1.1, the histogram shown in Figure 2.1 (a) is quite similar
to that shown in (b) of Figure 2.1. This means that histograms cannot
capture some aspects of the chara cteristics of the time series that are
visually apparent.
Figures 2.1 (c) and (d) are scatterplots obtained by putting y
n−2
on
the horizontal axis and y
n
on the vertical axis, fo r the yaw rate and the
ship’s roll data , respectively. Similarly, Figures 2.1(e) and (f) show scat-
terplots obtained by pu tting y
n−4
on the h orizontal axis, again with the
time series as before. The scatterplot in (c) shows that the data are dis-
tributed evenly within a circle in the vicinity of the or igin and this indi-
cates that, in the c ase of the yaw rate, there is little correlation between
y
n
and y
n−2
.
17
18 THE COVARIANCE FUNCTION
Figure 2.1: Histograms and scatterplots of the yaw rate and rolling of a ship.