Fishwick P.A. (editor) Handbook of Dynamic System Modeling
Подождите немного. Документ загружается.

5-14 Handbook of Dynamic System Modeling
Recall that functions such as the exponentials of Eq. (5.28) and Eq. (5.29), as well as sinusoids and
logarithms, are transcendental functions that can always be represented as power series. For example, the
power series for the exponential function is
e
x/λ
= 1 +
x
λ
+
1
2!
x
λ
2
+
1
3!
x
λ
3
+ +
1
n!
x
λ
n
+ (5.30)
It is clear that the argument of the exponential must be dimensionless because without this property
Eq. (5.30) would not itself be a rational equation. Furthermore, one could not calculate numerical values
for the exponential—or any other transcendental—function, if its argument was not dimensionless. The
presence of a scale factor in Eq. (5.30) renders the exponential’s argument dimensionless, and so numerical
calculations can be performed.
Now, a charged capacitor draining through a resistor produces a voltage drop V (t)atarateproportional
to the value of the voltage at any given instant. The mathematical model is
dV(t)
dt
=−λV(t) (5.31)
which can be rewritten as
dV(t)
V(t)
=−λ dt (5.32)
For this rate equation to be a rational equation, the net dimensions of each side of Eq. (5.32) must be
the same, which means that each side must be dimensionless. The left-hand side is clearly dimensionless
because it is the ratio of a voltage change to the voltage itself. The right hand will be dimensionless only if
the scale factor, λ, has physical dimensions such that [λ] =1/T. Furthermore, the dimensionless product
λt can be used to derive a measure of the time that it takes to discharge the capacitor being modeled. Thus,
define a decay or characteristic time as the time it takes for the voltage to decrease to a specified fraction of
its initial value, say 1/10. The characteristic or decay time of the charged capacitor would then be
V(t
decay
) ≡
V
0
10
(5.33)
The value of the characteristic time t
decay
can be calculated from the solution to Eq. (5.32) as
λ
∼
=
2.303
t
decay
(5.34)
Equation (5.34) says that the scale factor λ for the discharging capacitor is inversely proportional to the
characteristic (decay) time, and so the voltage in the capacitor can then be written as
V(t)
∼
=
V
0
e
−2.303(t/t
decay
)
(5.35)
5.3.4 Consequences of Choosing a Scale
Since all actions have consequences, it should come as no surprise that the acquisition of experimental
data, its interpretation, and its perceived meaning(s) generally can be very much affected by the choice of
scales for presenting and organizing data. To illustrate how scaling affects data acquisition, consider the
diagnosis of a malfunctioning electronic device such as an audio amplifier. Such amplifiers are designed to
reproduce their electrical input signals without any distortion. The outputs are distorted when the input
signal has frequency components beyond the amplifier’s range, or when the amplifier’s power resources
are exceeded. Distortion also occurs when an amplifier component fails, in which case the failure must be
diagnosed to identify the particular failed component(s).
A common approach to doing such diagnoses is to display (on an oscilloscope) the device’s output to
a known input signal. If the device is working properly, a clear, smooth replication of the input would
Basic Elements of Mathematical Modeling 5-15
Square wave input
Square wave output on
timescale of 0.5 s/division
Square wave output on
timescale of 0.5 ms/division
Square wave output on
timescale of 0.5 s/division
(a)
(b)
(c)
(d)
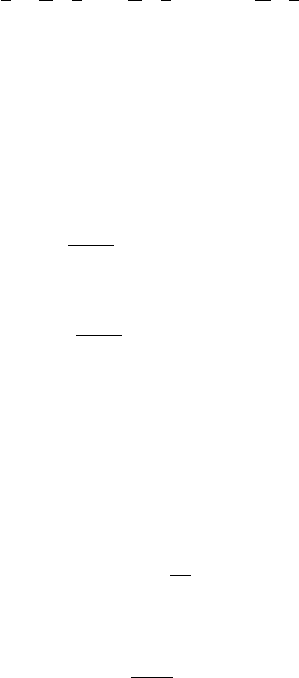
FIGURE 5.5 A square wave (a) is the input signal to a (hypothetical) malfunctioning electronic device. Traces
of the output signals are shown at three different timescales (i.e., long, short, and shorter): (b) 0.5 s/division; (c)
0.5 ms/division; and (d) of 0.5 µs/division.
be expected. One standard test input is the square wave shown in Figure 5.5(a). A nice replication of
that square wave is shown in Figure 5.5(b), and it seems just fine until it is noticed that the horizontal
timescale is set at a fairly high value, that is, 0.5 s/division. To ensure that something that might not show
up on this scale is not overlooked, the same signal we spread out on shorter timescales of 0.5 ms/division
(Figure 5.5[c]) and 0.5 µs/division (Figure 5.5[d]), neither of which is a nice square wave. This suggests that
the device is malfunctioning. Had the oscilloscope not been set to shorter, more appropriate timescales,
an erroneous conclusion might have been reached. Thus, it is important to understand that scaling issues
are central not only to displaying experimental data, but also to its measurement and interpretation.
5.3.5 Scaling and Perceptions of Data Presentations
The scales used to present modeling “results” also significantly influence how such data are perceived, no
matter whether those models are analytical or experimental in nature. Indeed, individuals and institutions
have been known to choose scales and portrayals to disguise or even deny the realities they purport to
present. Thus, whether by accident or by intent, scales can be chosen to persuade. While this is more of
a problem in politics and the media than it is in the normal practice of engineering and science, it seems
useful to touch on it briefly here since the underlying issue is a consequence of scale.
Figure 5.6 and Figure 5.7 illustrate the consequences of scale in contexts somewhat beyond the normal
professional concerns of engineers and scientists. Both examples are shown because they use the same
5-16 Handbook of Dynamic System Modeling
1955 1956
325
300
275
Before stricter
enforcement
After stricter
enforcement
Connecticut traffic deaths,
before (1955) and after (1956)
stricter enforcement by the police
against cars exceeding speed limit
(a)
1951 1953 1955 1957 1959
225
250
275
300
325
Connecticut traffic deaths,
1951–1959
(b)
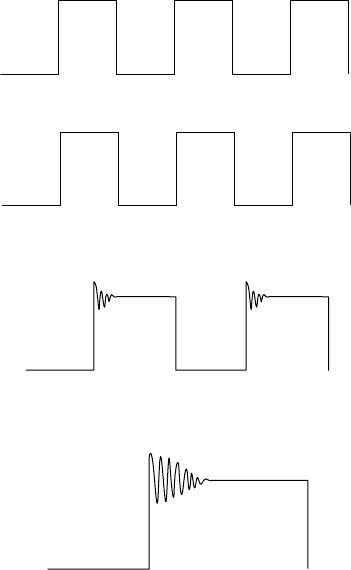
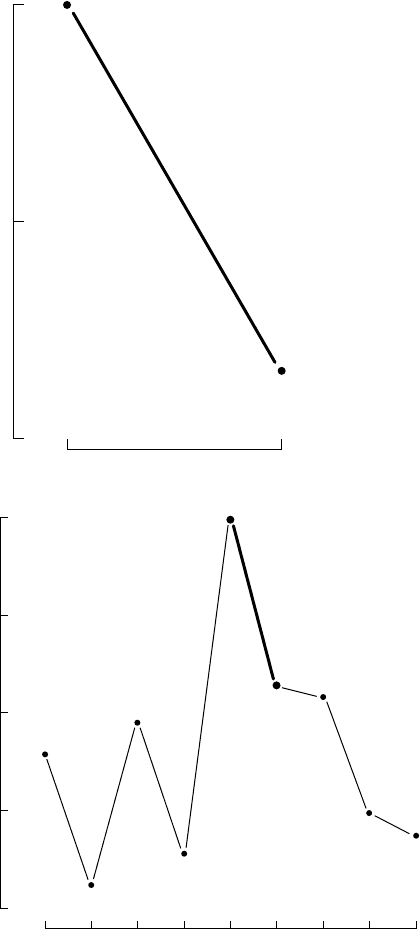
FIGURE 5.6 Plots of traffic fatalities in the state of Connecticut, showing the dangers of truncating scales and deleting
comparative data: (a) Connecticut data for 1955–1956; (b) Connecticut data for 1951–1959; and (c) normalized data
for Connecticut and three neighboring states for 1951–1959. (From Tufte, E. R., The Visual Display of Quantitative
Information, Graphics Press, Cheshire, Connecticut, 1983.)
technique of carefully choosing a scale in a figure to present data out of context. Figure 5.6(a) shows a
rather dated picture of traffic deaths in the state of Connecticut during the time interval 1956–1957, and a
sharp drop in traffic deaths can be seen to have occurred then. But, was that drop real? And, in comparison
to what? It turns out that if more data are added, as in Figure 5.6(b), the drop is seen to follow a rather
Basic Elements of Mathematical Modeling 5-17
1951 1953 1955 1957 1959
8
10
12
14
16
New York
Connecticut
Massachusetts
Rhode Island
Traffic deaths per 100,000
persons in Connecticut,
Massachusetts, Rhode Island,
and New York, 1951–1959
(c)
FIGURE 5.6 (Continued)
precipitous increase in the number of traffic fatalities. Further, data from adjacent states were added and
the number of deaths was normalized against a common base, as shown in Figure 5.6(c), it would then be
seen that the numbers of Connecticut’s traffic fatalities was similar to those of its neighbors, although the
impact of the stricter enforcement is still visible after 1955.
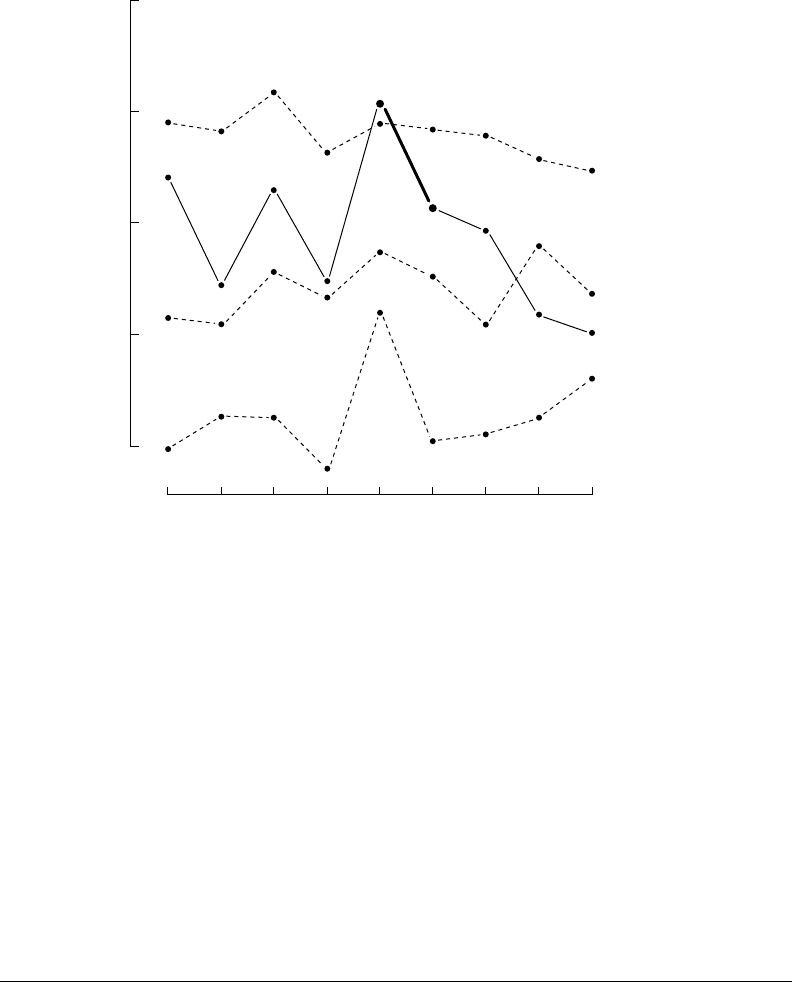
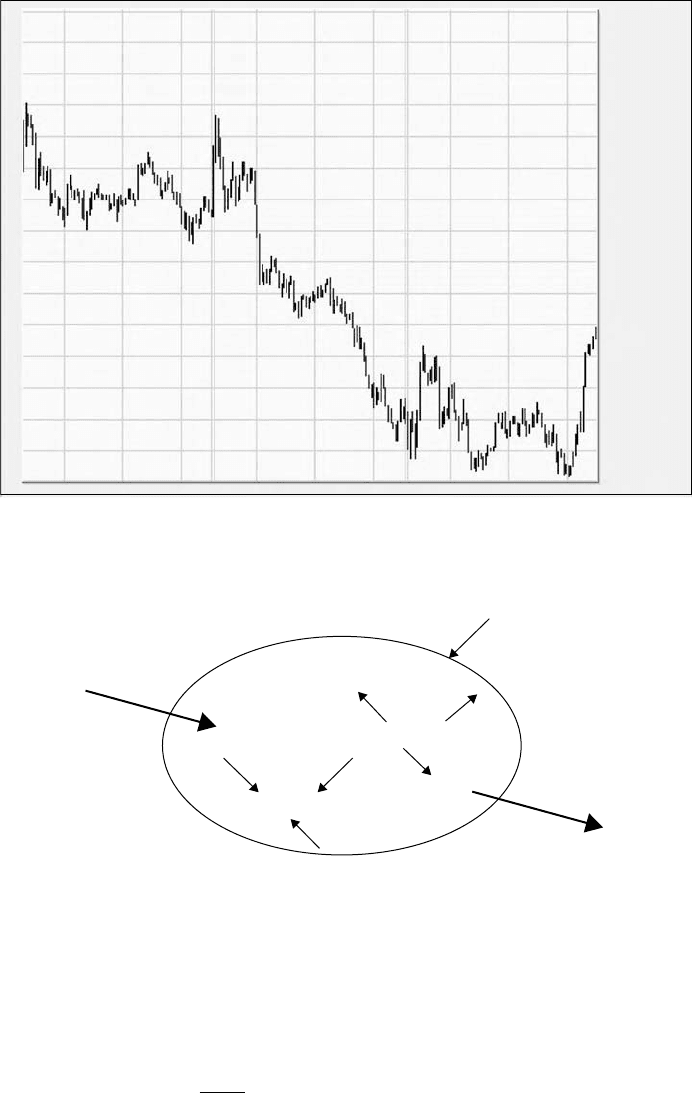
Similarly, one of the most often shown graphics in the financial pages of newspapers, or in their televised
equivalents, are graphics such as that shown in Figure 5.7. Here, the immediate sense conveyed is that the
bottom has dropped out of the market because the scale used on the ordinate (or y- or vertical axis) has
been so foreshortened that it includes only one week’s trading activities. Thus, a decline of a few percent
in a stock market barometer such as the Dow Jones Industrial Average (DJIA) appears initially like a much
more precipitous decline—especially if the curve itself is drawn in red ink!
5.4 Conservation and Balance Principles
The development of mathematical models often starts with statements that indicate that some property of
an object or system is being conserved. For example, the motion of a body moving on an ideal, frictionless
path could be analyzed by noting that its energy is conserved. Sometimes, as when modeling the population
of an animal colony or the volume of a river flow, quantities that cross a defined boundary (whether
individual animals or water volumes) must be balanced. Such balance or conservation principles are applied
to assess the effect of maintaining or conserving levels of important physical properties. Conservation and
balance equations are related—in fact, conservation laws are special cases of balance laws.
The mathematics of balance and conservation laws are straightforward at this level of abstraction.
Denoting the physical property being monitored as Q(t) and the independent variable time as t, a balance
5-18 Handbook of Dynamic System Modeling
10,360
10,340
10,320
10,300
10,280
10,260
10,240
10,220
10,200
10,180
10,160
10,140
10,120
10,100
10,080
10,060
FIGURE 5.7 A plot of the performance of the New York Stock Exchange during 13–15 May 2002, as exemplified by
that universally-cited barometer, the Dow Jones Industrial Average (DJIA). (From www.bigcharts.com, 2002)
Efflux, q
out
System boundary
Q (t )
Influx, q
in
Consumption, c
Generation, g
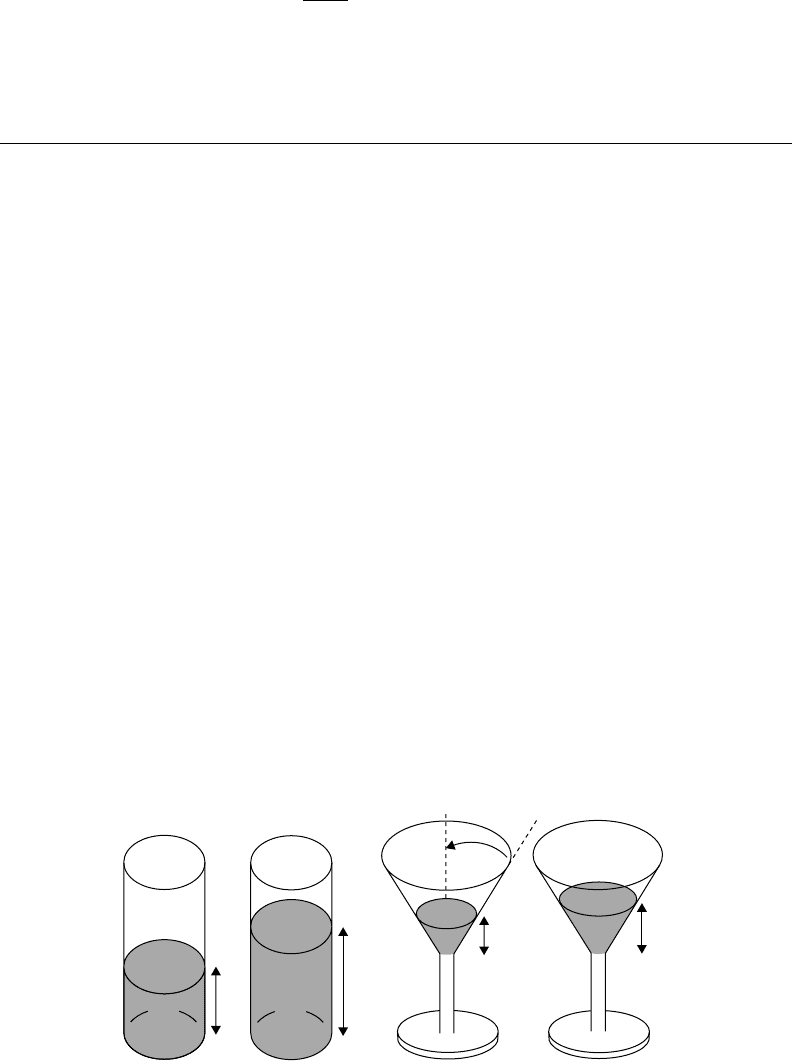
FIGURE 5.8 A system boundary surrounding the object or system being modeled. The influx q
in(t)
, efflux q
out(t)
,
generation g(t), and consumption c(t) affect the rate at which the property of interest, Q(t), accumulates within the
boundary. (After Cha, P. D., Rosenberg, J. J., and Dym, C. L., Fundamentals of Modeling and Analyzing Engineering
Systems, Cambridge University Press, New York, 2000.)
law for the temporal or time rate of change of that property within the system boundary depicted in
Figure 5.8 can be written as
dQ(t)
dt
= q
in
(t) +g(t) −q
out
(t) −c(t) (5.36)
where q
in
and q
out
represent the flow rates of Q(t) into (the influx) and out of (the efflux) the system
boundary, g(t) is the rate at which Q is generated within the boundary, and c(t) the rate at which Q is
consumed within that boundary. Note that Eq. (5.36) is also called a rate equation because each term has
both the meaning and dimensions of the rate of change with time of the quantity Q(t).
Basic Elements of Mathematical Modeling 5-19
In those cases where there is no generation and no consumption within the system boundary (i.e., when
g =c =0), the balance law in Eq. (5.36) becomes a conservation law:
dQ(t)
dt
= q
in
(t) −q
out
(t) (5.37)
Here, then, the rate at which Q(t) accumulates within the boundary is equal to the difference between the
influx, q
in
(t), and the efflux, q
out
(t).
5.5 The Role of Linearity
Linearity is one of the most important concepts in mathematical modeling. Models of devices or systems
are said to be linear when their basic equations—whether algebraic, differential, or integral—are such
that the magnitude of their behavior or response produced is directly proportional to the excitation or
input that drives them. Even when devices like the classic pendulum are more fully described by nonlinear
models, their behavior can often be approximated by linearized or perturbed models, in which cases the
mathematics of linear systems can be successfully applied.
Linearity is applied during the modeling of the behavior of a device or system that is forced or pushed
by a complex set of inputs or excitations. The response of that device or system to the sum of the individual
inputs is obtained by adding or superposing the separate responses of the system to each individual input.
This important result is called the principle of superposition. Engineers use this principle to predict the
response of a system to a complicated input by decomposing or breaking down that input into a set of
simpler inputs that produce known system responses or behaviors. However, some typicalbehaviors cannot
be captured by linear models, in which case it is important to be careful not to oversimplify inappropriately.
5.5.1 Linearity and Geometric Scaling
The geometric scaling arguments discussed earlier can also be used to demonstrate some ideas about
linearity in the context of geometrically similar objects, that is, objects whose basic geometry is essentially
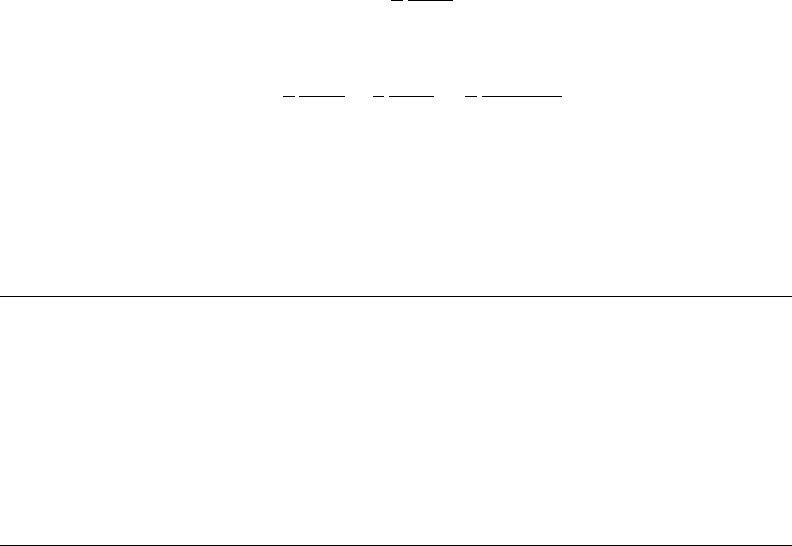
the same. Figure 5.9 shows two pairs of drinking glasses: one pair are right circular cylinders of radius r
and the second pair are right circular inverted cones having a common semi-vertex angle α. If the first pair
is filled to heights h
1
and h
2
respectively, the total fluid volume in the two glasses is
V
cy
= πr
2
h
1
+πr
2
h
2
= πr
2
(h
1
+h
2
) (5.38)
Eq. (38) demonstrates that the volume is linearly proportional to the height of the fluid in the two
cylindrical glasses. Further, since the total volume can be obtained by adding or superposing the two
heights, the volume V
cy
is a linear function of the height h. Note, however, that the volume is not a linear
function of radius r.
h
1
h
2
h⬘
1
h⬘
2
a
FIGURE 5.9 Two pairs of drinking glasses: one pair are cylinders of radius r, the second pair are inverted cones
(sometimes referred to as martini glasses) having a common semivertex angle α.
5-20 Handbook of Dynamic System Modeling
In the two conical glasses, the radii vary with height. In fact, the volume, V
co
, of a cone with semivertex
angle, α, filled to height, h,is
V
co
=
π
3
h
3
tan
2
α
(5.39)
Hence, the total volume of fluid in the two conical glasses of Figure 5.9 is
V
co
=
π
3
h
3
1
tan
2
α
+
π
3
h
3
2
tan
2
α
=
π
3
(h
1
+h
2
)
3
tan
2
α
(5.40)
That is, the relationship between volume and height is nonlinear for the conical glasses, the total volume
cannot be calculated just by superposing the two fluid heights, h
1
and h
2
. Note that this result, while to
a simple, even obvious case, is emblematic of what happens to superposition when a linearized model is
replaced by its (originating) nonlinear version.
5.6 Conclusions
This chapter has provided a very brief summary of the most basic foundations of mathematical modeling.
In this context, the discussion began with a statement of principles under which the activity of mathe-
matical modeling could be properly performed. This was followed by a discussion of basic foundational
matters, including dimensional homogeneity and dimensional analysis, abstraction and scaling, balance
and conservation laws, and an introduction to the role of linearity. It is important to note that this overview
emphasized brevity, dictated by chapter length limitations, and so it will hopefully serve as a stimulant to
the reader’s appetite for further reading and application of these basic ideas and methods.
Acknowledgment
The author is very grateful to Elsevier Academic Press for permission to summarize (or scale down!) the
first three chapters of Dym, C. L., Principles of Mathematical Modeling, 2nd Edition, Elsevier Academic
Press, Orlando, Florida, 2004, and to reprint Figures 5.1–5.9 (as numbered here) from that book.
References
Alexander, R. M., Size and Shape, Edward Arnold, London, 1971.
Carson, E. and Cobelli, C. (Eds.), Modelling Methodology for Physiology and Medicine, Academic Press, San
Diego, 2001.
Cha, P. D., Rosenberg, J. J., and Dym, C. L., Fundamentals of Modeling and Analyzing Engineering Systems,
Cambridge University Press, New York, 2000.
Dym, C. L., Principles of Mathematical Modeling, 2nd Edition, Elsevier Academic Press, Orlando, Florida,
2004.
Tufte, E. R., The Visual Display of Quantitative Information, Graphics Press, Cheshire, Connecticut, 1983.
Tufte, E. R., Envisioning Information, Graphics Press, Cheshire, Connecticut, 1990.
6
DEVS Formalism for
Modeling of
Discrete-Event Systems
Ta g G on K im
KAIST
6.1 Introduction .................................................................... 6-1
6.2 System-Theoretic DES Modeling ................................... 6-3
6.3 DEVS Formalism for DES Modeling ............................. 6-3
Atomic DEVS Model
•
Coupled DEVS Model
•
Example of DEVS Modeling: Ping-Pong Protocol
•
State Equation Form of Atomic DEVS
6.4 DES Analysis with DEVS Model ..................................... 6-7
Composition of Atomic DEVS Models
•
System Analysis by Composed DEVS Model
6.5 Simulation of DEVS Model ............................................ 6-10
DEVS Modeling Simulation Methodology and
Environment
•
Simulation Speedup and
Simulators Interoperation
6.6 Conclusion ...................................................................... 6-12
This chapter introduces the discrete-event systems specification (DEVS) formalism for modeling of
discrete-event systems (DESs). Based on set theory, the formalism specifies DESs in a hierarchical, modular
manner. Models specified by the formalism can be used for analysis as well as performance simulation of
DESs.
6.1 Introduction
A DES consists of a collection of components that interact with each other via events exchange to perform
a given function. A component of such a system is represented by a discrete states set and operations
defined on the set. The operations are mainly a set of rules for states transition, which is performed only
with an occurrence of instantaneous events over time. An event in DES may occur either by an external
stimulus to the component (external event) or an internal condition within the component (internal
event). A message arrival and a timeout in a communication system are examples of an external and an
internal event, respectively. Consider a DES of a ping-pong protocol system whose state transition diagram
is shown in Figure 6.1.
The protocol system consists of two components, SENDER and RECEIVER, each of which has its
own states and associated transition rules. Note that components, SENDER and RECEIVER, are cou-
pled together via two events: msg and ack. Let us first give an informal description of each component
and then the interaction between the two. SENDER has two states, “Send” and “Receive,” the input
event ?ack and the output event !msg. Initially, SENDER stays at the “Send” state at which an output
event !msg is generated with a state transition to the “Receive” state. It then waits for an input event
6-1
6-2 Handbook of Dynamic System Modeling
!msg ?msg
!ack?ack
Receiver
Send
Receive
!msg
?ack
*timeout
Sender
Receive
Accept
?msg
!ack
: state “q”
: input event “a”
: output event “b”
: internal event “c”
: components coupling
?a
!b
*c
q
FIGURE 6.1 State transition diagram for ping-pong protocol.
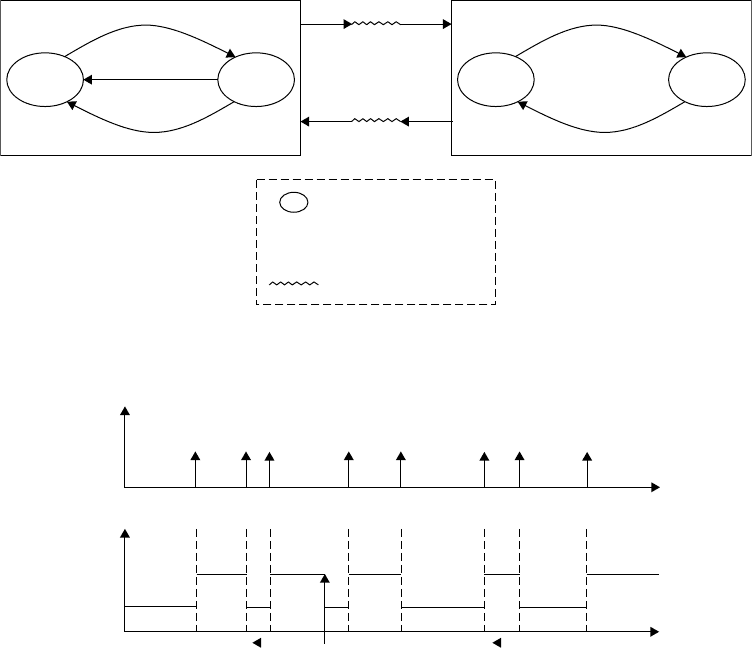
Time
Event (external view)
msg
?ack
msg
msg
?ack
?ack
msg
!msg
Time
State (internal view)
Send
Receive
*timeout
FIGURE 6.2 External and internal views for SENDER.
?ack to be arrived from RECEIVER. When SENDER receives the ?ack event at the “Receive” state it returns
to the “Send” state again. However, if the ?ack event is not arrived before a specified period SENDER
changes its state to the “Send” state. The state change is based on an assumption that !msg or ?ack is lost
during transmission through components coupling. Once SENDER comes back to the“Send”state it sends
!msg again, which may be a new one or the one previously sent. Note that SENDER changes its state from
“Receive”to“Send” either by an external input event ?ack or an internal event *timeout of the timeout
condition. The operation of RECEIVER can be described similarly.
The informal description of SENDER allows one to identify an external and an internal view of a
DES. The external view is a sequence of two events !msg and ?ack. The order of the two depends on
a rate of lost events and/or a value of the timeout. Thus, a legal events sequence may be one such as
!msg →?ack →!msg →!msg →!msg … →!ack. However, an events sequence !msg →?ack →?ack is not
a legal one. In contrast, the internal view of SENDER is a sequence of states which is a piecewise constant
function over time. For example,“Send”→“Receive”→“Send”→“Receive”… →“Send” is one such states
sequence. Figure 6.2 shows an external as well as an internal view of SENDER. Note that a state transition
from “Receive”to“Send” has been made by an internal event
∗
timeout.
A DES can be viewed as a system whose abstraction level in modeling is at the discrete-event one. In
the level, a modeler is interested only in what happens if an event occurs while ignoring details of system
behavior between events occurrences. In this sense most systems can be modeled at the discrete-event level
which we call a DES. Examples of DES include a communication protocol viewed at or above the data

DEVS Formalism for Modeling of Discrete-Event Systems 6-3
link layer, a computer system viewed at or above the operating system level, a military war game at the
operation level, and others.
Rest of this chapter is organized as follows. Section 6.2 presents DES modeling in the system-theoretic
view and Section 6.3 introduces the DEVS formalism. Analysis and simulation of DES with DEVS models
are given in Sections 6.4 and 6.5, respectively. Section 6.6 concludes this chapter.
6.2 System-Theoretic DES Modeling
The system-theoretic approach for systems modeling views a system as an object in which its representation
and associated operations are explicitly defined. In the view a system is represented by three sets: inputs
set, outputs set, and states set; operations on the sets are defined as a collection of rules, or functions, for
state transition and output generation.
In DES, both inputs and outputs are finite event sets. However, a states set is not finite. To be precise
recall the definition of state at t in system theory: information required at t which uniquely determines
output at t
> t. In fact, an output in DES is generated at a specified time when a certain condition is
satisfied. Thus, a state at t is represented by a discrete state, s, and an associated elapsed time, e, which is
a real number. Of course, the maximum elapsed time for each discrete state is predefined, which we call
the maximum sojourn time, r, from now on. Then, a state (s,e) means that the discrete state s has been
kept for the e time unit without any external input. If no input is arrived at the state before the maximum
sojourn time r an output would be generated. Of course, an input event can be arrived anytime before
the r time unit. In such a case, the discrete state s is changed to a new one s
that has its own maximum
sojourn time r
. To be clear we call s a discrete state and q =(s,e) a total state or just a state of DES. Since e
is a real number q is not finite.
We are now ready to explain how system theory defines state transition functions of a dynamic system.
In the theory, two state transitions are considered: one with an input and the other without an input. For
example, a well-known vector differential equation for state transition of a linear continuous system is
dQ/dt =AQ + BX,whereQ is a state set, X an inputs vector, and A and B are the coefficient matrices.
Note that dQ/dt =AQ specifies state transition without inputs and dQ/dt =BX specifies that with inputs
X. As will be shown later, the same view would be applied in DES modeling. More specifically DES has a
state transition either with an external input event or with a condition internal to a system, which causes
an internal event. Such a condition at a state q =(s,e) includes e =r, meaning that an elapsed time e is
reached to the maximum sojourn time r at s. From now on we call state transition with an input as external
state transition and that without an input as internal state transition. Similarly, an output is a function of
both an input and a state. However, an output function can be represented only by state information, for
the information memorizes history of inputs information.
As shown in Figure 6.1, a DES consists of components that are connected together for interaction with
events exchange. Thus, specification of DES should have a means to specify the connection. In sum,
modeling of DES in the system-theoretic approach requires the following expression:
•
each component needs inputs set, outputs set, states set, state transition functions, both external
and internal transitions, and output function;
•
connection of components needs a means for coupling between events associated with components.
The DEVS formalism to be introduced in the following chapter supports such an expression in a formal
manner for modeling of DES.
6.3 DEVS Formalism for DES Modeling
The DEVS formalism, developed by Zeigler, specifies a DES with the following three major features
(Zeigler, 1984; Zeigler et al., 2000):
•
set theory-based formalism