Фафурин В.А., Терюшов И.Н. Автоматизация технологических процессов и производств
Подождите немного. Документ загружается.

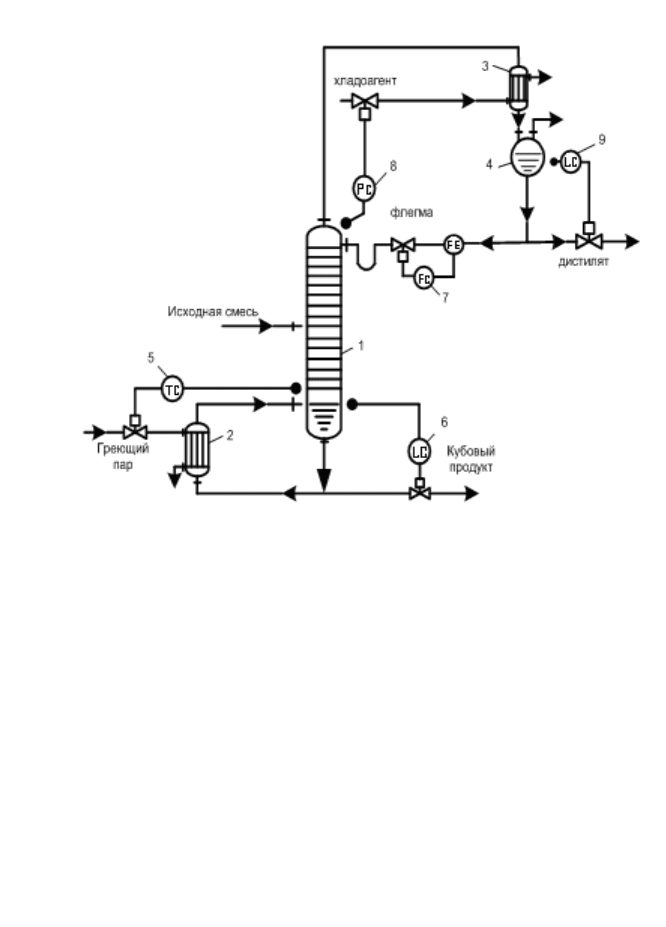
Рис. 3.24. Пример системы регулирования объекта с не-
сколькими входами и выходами: 1 - ректификационная колонна; 2 -
кипятильник; 3 - дефлегматор; 4 - флегмовая емкость; 5 - регулятор
температуры; 6,9 - регуляторы уровня; 7 - регулятор расхода; 8 -
регулятор давления
Например, для регулирования процесса в нижней части колонны
необходима стабилизация минимум двух технологических
параметров, характеризующих материальный баланс по жидкой фазе
и по одному из компонентов. Для этой цели обычно выбирают
уровень жидкости в кубе и температуру под первой тарелкой, а в
качестве регулирующих входных сигналов — расход греющего
пара и отбор кубового продукта. Однако каждое из регулирующих
воздействий влияет на оба выхода: при изменении расхода греющего
пара изменяется интенсивность испарения кубового продукта, а
вследствие этого — уровень жидкости и состав пара. Аналогично
изменение отбора кубового продукта влияет не только на уровень в
кубе, но и на флегмовое число, что приводит к изменению состава
пара в нижней части колонны.
Для регулирования процесса в верхней части в качестве
выходных координат можно выбрать давление и температуру пара, а
в качестве регулирующих входных параметров — подачу хладоагента
в дефлегматор и флегмы на орошение колонны. Очевидно, обе
входные координаты влияют на давление и температуру в колонне в
ходе тепловых и массообменных процессов.
Наконец, рассматривая систему регулирования температуры
одновременно в верхней и нижней частях колонны подачей
соответственно флегмы и греющего пара, также получим систему
несвязанного регулирования объекта с внутренними перекрестными
связями.
Системы регулирования объектов с запаздыванием
Большинство технологических объектов характеризуется
наличием чистого запаздывания в каналах регулирования.
Из-за значительного чистого запаздывания в объекте авто-
матизации существенно снижается качество регулирования при
использовании обычных промышленных регуляторов.
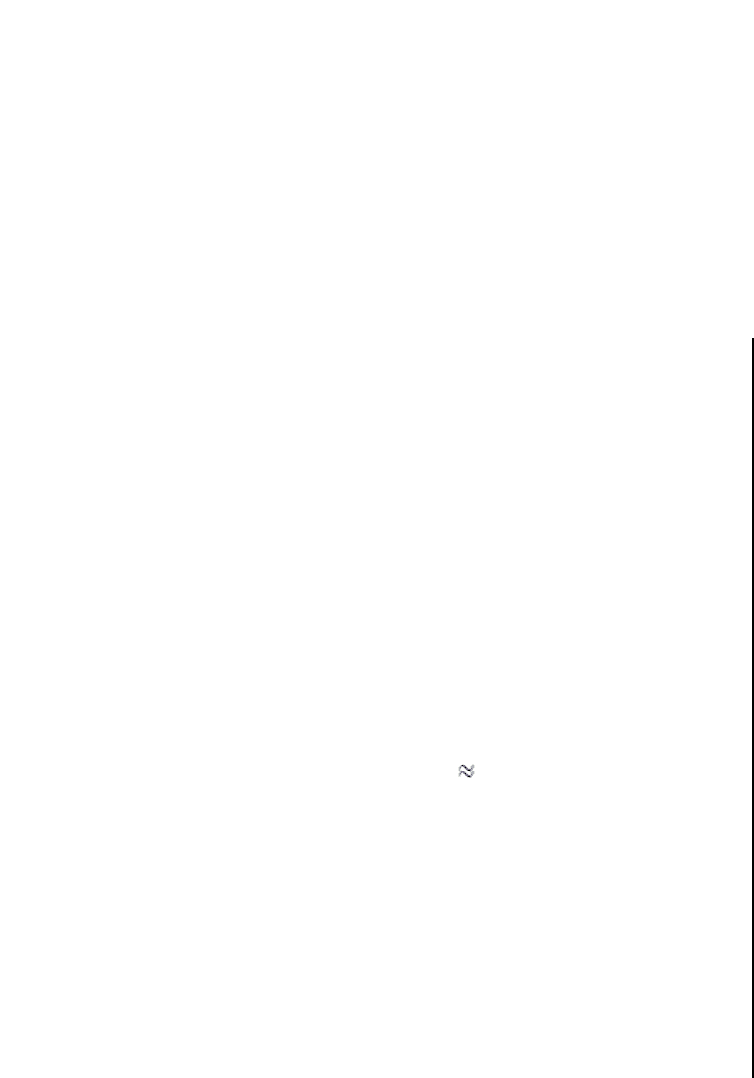
Даже при оптимальных настройках регуляторов качество
процессов регулирования тем хуже, чем больше и само запаздывание,
и его отношение к постоянной времени объекта τ/Т. Очевидно, на
интервале 2τ, пока регулирующее воздействие еще не сказывается на
выходе объекта, процесс регулирования совпадает с переходной
функцией объекта. При этом динамическая ошибка регулирования не
может быть меньше, чем значение выхода апериодического звена при
t = 2τ. Если, например, τ = Т, то у(2τ) = у
an
(Т) 0,63 y
max
, где y
max
—
установившееся значение выхода объекта (рис. 3.25).
T
t
2
2τ
τ
0
ymax
y
1
δ
T
t
2
2τ
τ
0
y
ymax
a
Рис. 3.25. Графики процессов регулирования при различных значениях
отношения τ/т: а — τ =0,2 Т; б — τ =Т; 1 — переходная функция
объекта; 2— процесс регулирования
В практике регулирования объектов с запаздыванием принято
считать, что если отношение τ/Т превышает 0,2, то применение
обычной непрерывной АСР со стандартным регулятором не обеспечит
удовлетворительного качества регулирования. В предельном случае
— для усилительного звена с чистым запаздыванием (т. е. Т=0) —
динамическая ошибка принимает максимально возможное значение-
kx (где х — ступенчатое возмущение). Максимальный эффект,
который может обеспечить в этом случае идеальная система регулиро-
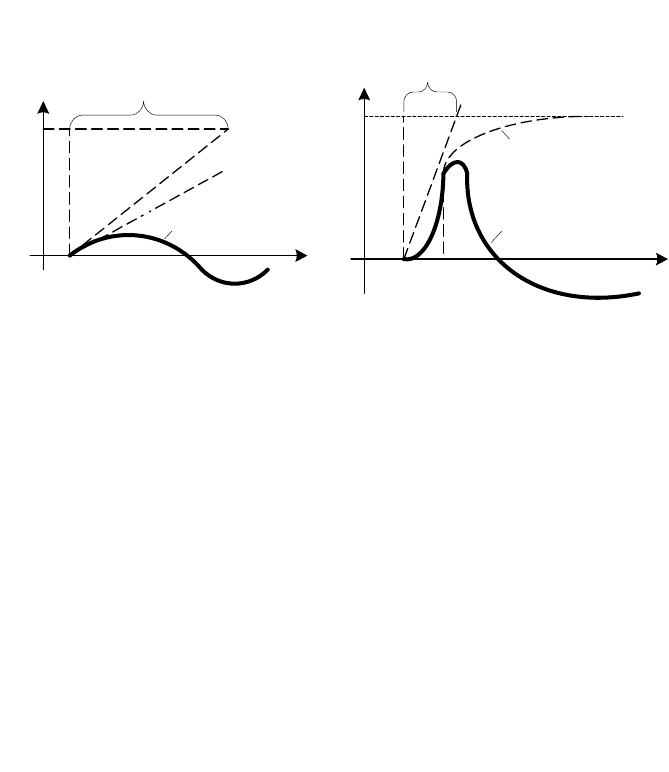
вания,— сведение к нулю ошибки регулирования за время 2τ.
Реальный ПИ-регулятор, настроенный на заданную степень затухания
переходного процесса, может справиться с этой задачей за время,
приблизительно равное (5—6)τ (рис. 3.26).
t
0
y
ymax
τ
2τ
3τ
4τ
Рис. 3.26. Процесс регулирования звена чистого запаздыва-
ния ПИ-регулятором
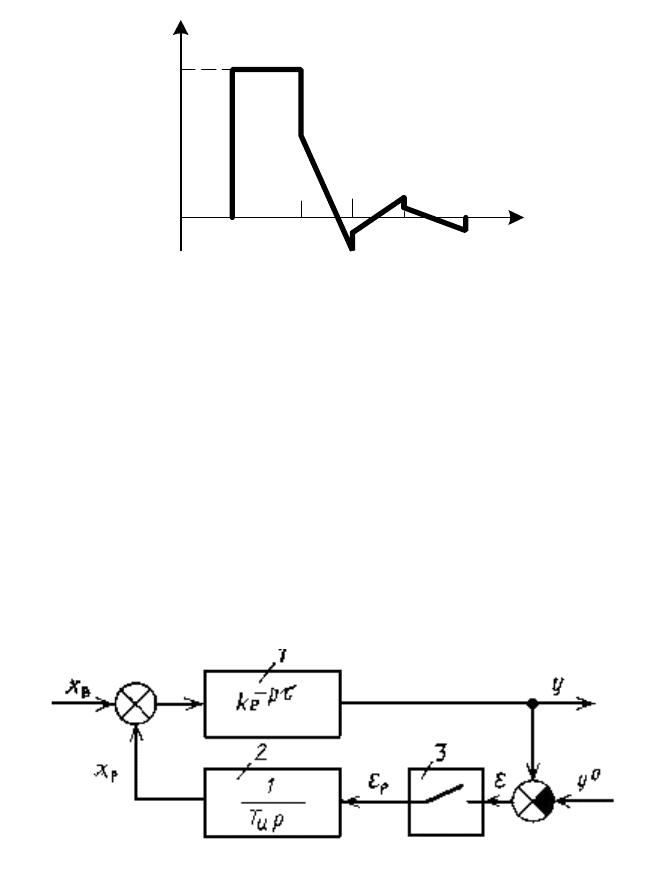
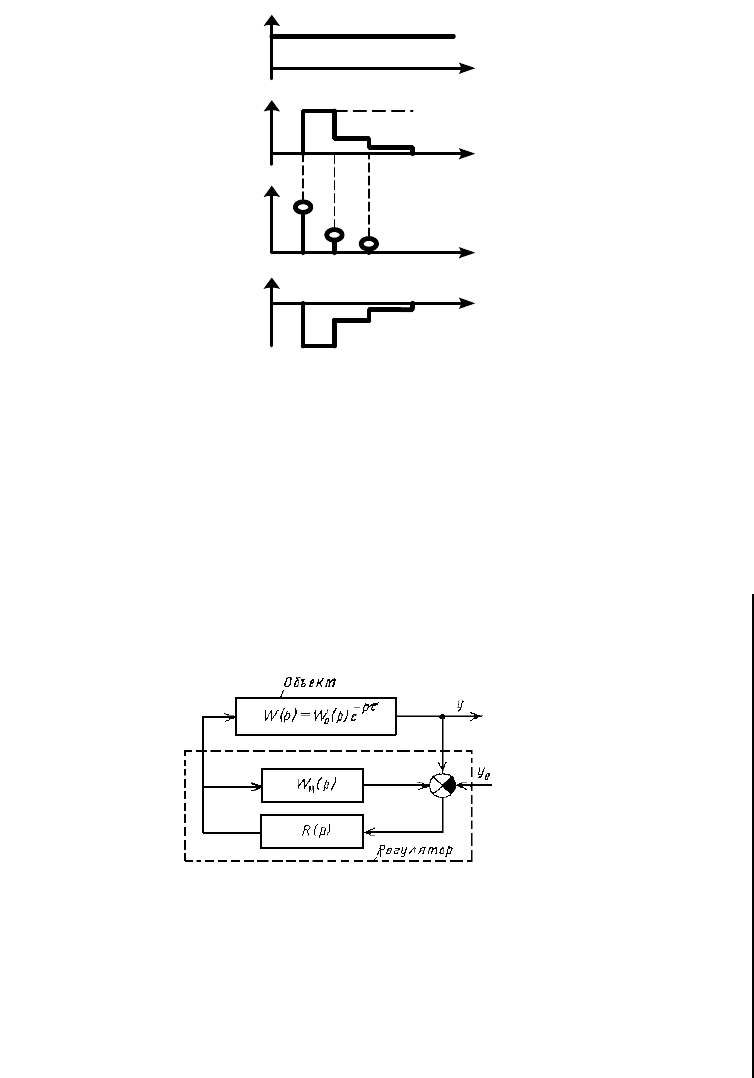
Примерно такой же эффект дает импульсное регулирование,
когда регулятор подключают к объекту периодически (с периодом
t
0
>τ) на небольшой отрезок времени. При этом на объект подается
регулирующее воздействие, пропорциональное ошибке. Оно остается
постоянным до следующего момента включения регулятора, когда
проявится эффект от предыдущего воздействия. При правильном
выборе интервала t
0
можно добиться некоторого уменьшения времени
переходного процесса, однако значения интегральных критериев
качества остаются приблизительно такими же, как и при непрерывном
регулировании. На рис. 3.27 приведены структурная схема и графики
переходных процессов в импульсной АСР.
0
t
ε
τ
εp
t
t
t
t0 2t0
3t0
0
0
0
xp
Xв
Рис 3.27. Структурная схема АСР и графики переходных
процессов при импульсном регулировании звена чистого запазды-
вания: 1- объект; 2 — регулятор; 3 — импульсный элемент
В тех случаях, когда к качеству переходных процессов в системе
регулирования предъявляют высокие требования, целесообразно
использовать специальные регуляторы или алгоритмы,
обеспечивающие компенсацию чистого запаздывания. Примером
такого регулятора является регулятор Смита. Он представляет
собой замкнутую систему, состоящую из обычного регулятора
R(p) и модели объекта W
М
(p), включенной в линию обратной связи к
регулятору (рис. 3.28).
Рис. 3.28. Структурная схема АСР с регулятором Смита

Уравнение модели объекта выводится из условия, чтобы
желаемая передаточная функция объекта по каналу регулирования
не содержала звена чистого запаздывания. Представим истинную
передаточную функцию объекта в виде произведения
W(p) = W
0
(р)e
-рτ
(32)
Здесь W
0
(р)=B(p)/A(p) — дробно рациональная функция. Тогда
желаемая передаточная функция будет равна W
0
(р). Условие
компенсации запаздывания запишется в виде равенства
W
0
(р)e
-рτ
+W
м
(p) = W
0
(p)
Откуда передаточная функция модели запишется в виде:
W
м
(p) = W
0
(р) (l - e
-рτ
). (33)
В этом случае характеристическое уравнение разомкнутой
системы имеет вид:
1 - W
0
(p)R(p) = 0. (34)
Следовательно, при одних и тех же параметрах настройки ре-
гуляторов запас устойчивости АСР с регулятором Смита выше, чем
обычных АСР. Это означает, что при одинаковом запасе устойчивости
АСР (например, при одной и той же степени затухания переходных
процессов) для регулятора Смита можно принять более высокую
рабочую частоту и больший коэффициент усиления, что обеспечит
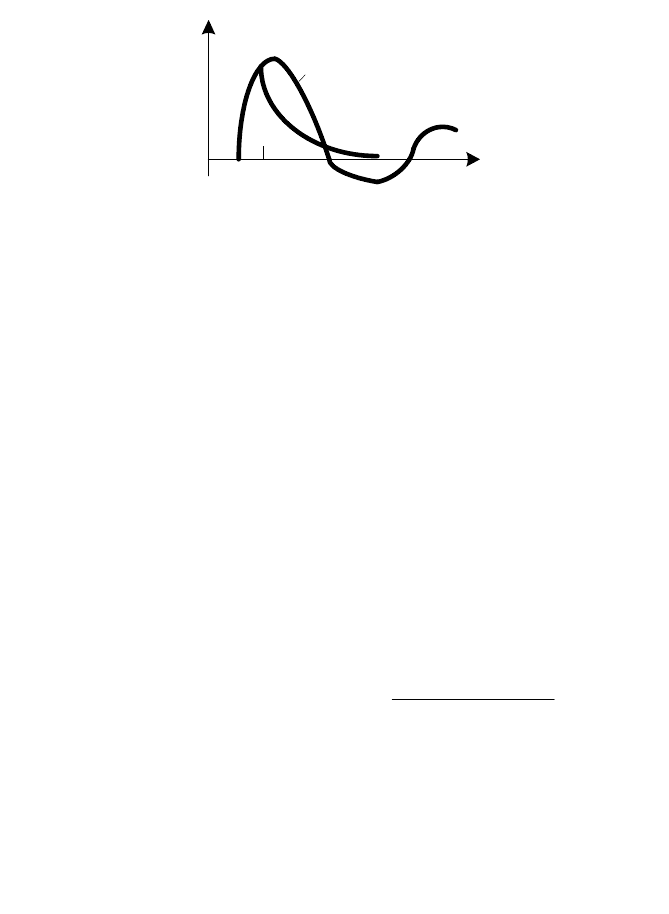
лучшее качество регулирования. Для сравнения на рис. 3.29
приведены процессы регулирования одного и того же объекта ПИ-
регулятором и регулятором Смита.
t
1
2
τ
2τ
0
y
Рис. 3.29. Графики переходных процессов в' АСР: 1 - с ПИ-
регулятором; 2 - с регулятором Смита
К недостаткам регулятора Смита, кроме сложности его
структуры и аппаратурной реализации, относится высокая чув-
ствительность к параметрам настройки модели. Ошибки в настройке
модели, вызванные неточностью априорных знаний о характеристиках
объекта или нестационарностью его свойств, могут привести не
только к ухудшению качества переходных процессов, но и к потере
устойчивости системой регулирования.
При построении систем автоматизации весьма полезными будут
общие концепции влияния запаздывания на характер переходных
процессов в АСР, на устойчивость и качество их работы.
Объекты могут обладать запаздыванием как по каналам
возмущающих воздействии, так и каналам регулирования.
Если запаздывание имеет место по каналу возмущающего
воздействия, то передаточная функция системы может быть записана
в виде:
рWрW
ерW
W
рх
р
z
yz
1
,
(35)
где W
z
(p) и W
x
(р) — передаточные функции объекта по каналам
соответственно возмущающего и регулирующего воздействия при
отсутствии запаздывания; W
p
(p) —передаточная функция регулятора.
Из анализа формулы (35) следует, что по сравнению с
переходным процессом в системе без запаздывания наличие
последнего сдвигает переходный процесс на время τ, не изменяя его
формы, устойчивость и показатели качества (при тех же значениях
настроечных параметров регулятора) остаются прежними.
При запаздывании по каналу регулирующего воздействия
передаточная функция системы принимает вид:
рWерW
рW
W
р
р
х
z
yх
1
.
(36)
В этом случае запаздывание усложняет задачу регулирования
объекта; при этом быстродействие АСР уменьшается, качество
регулирования ухудшается, область устойчивости системы в
плоскости настроечных параметров регулятора резко сокращается.
Для подтверждения последнего положения выделим области
устойчивости одноконтурной замкнутой АСР, состоящей из
устойчивого объекта 1-го порядка с запаздыванием и ПИ-регулятора,
передаточные функции которых имеют вид:
р
р
р
х
е
Т
k
ерWрW
1
0
0
; (37)
рТ
kрW
и
рР
1
; (38)
при различных значениях τ.
Как известно, с учетом отрицательной обратной связи
характеристическое уравнение этой системы имеет вид:
01
0
рWрW
Р
.
(39)
Подставляя в него выражения передаточных функций объекта и
регулятора, получим
1
1
1
0
рТ
kе
Т
k
и
р
р
Р
. (40)
Для нахождения границ устойчивости заменим в уравнении (40)
символ р на мнимую величину iω и, освобождаясь от мнимости в
знаменателе, найдем
.1
1
1
22
0
и
р
Тarctgi
Т
ikе
Т
k
(41)
Для общности полученных результатов введем новые
обозначения
;хТ
;
Т
Т
Т
и
и подставляя их в уравнение (41), получим:
хarctgxi
р
е
k
х
х
ik
0
2
11
. (42)
Представляя экспоненциальную функцию через
тригонометрические
xixе
ix
sincos
,
разделив уравнение (42) на действительную и мнимую части и
выделив искомые параметры системы, получим
хarctgx
k
х
k
р
cos
1
0
2
, (43)
хarctgx
хх
k
Т
Т
и
sin
1
1
2
0
. (44)
Задаваясь значениями х, при k
0
=2, вычислим величины k
р
и 1/γ
для нескольких значений α. Полученные результаты, приведенные
на рис. 3.30, показывают, что размеры области устойчивости
системы сильно зависят от значения τ.
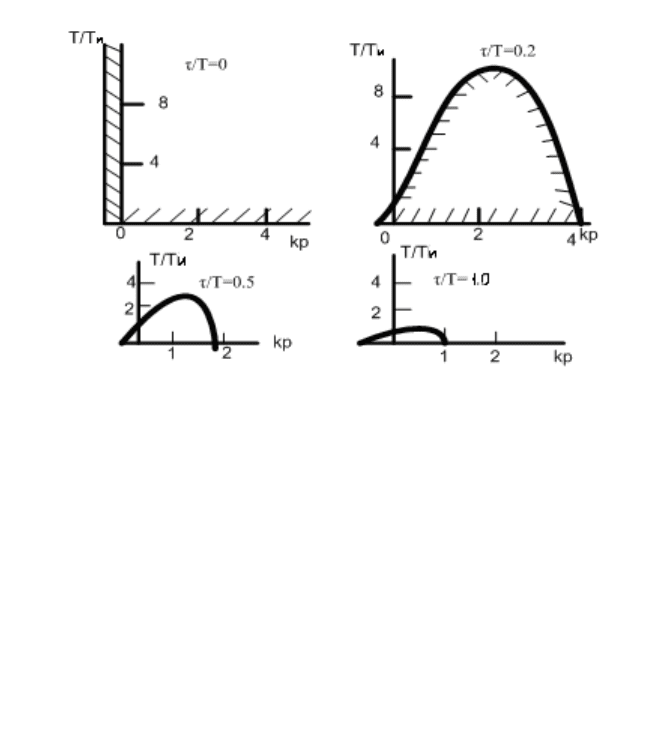
Рис. 3.30. Зависимость размеров области устойчивости АСР
в плоскости параметров регулятора от запаздывания объекта
При τ=0 система устойчива, если значения параметров настрой-
ки регулятора, находятся в интервалах - 0,5< k
р
< ∞ и 0 < Т/Т
И
< ∞.
При τ>0 область значений параметров регулятора, при которых
система устойчива намного меньше. С возрастанием отношения τ/Т
область устойчивости интенсивно сокращается. Можно также
показать, что с возрастанием τ области параметров настройки
регулятора, соответствующие определенным показателям качества
процесса регулирования, также уменьшаются. Это свидетельствует о
сокращении возможностей достижения переходного процесса с
требуемыми по условиям технологии параметрами качества
регулирования.
Улучшить качество регулирования объектов, имеющих
значительные емкостные запаздывания можно применением
регуляторов с дифференциальной составляющей в их законе
регулирования.
Для подтверждения этого проведем сравнительный анализ
качества работы, например, П и ПД – регуляторов