Фафурин В.А., Терюшов И.Н. Автоматизация технологических процессов и производств
Подождите немного. Документ загружается.

Введение корректирующего импульса по наиболее сильному
возмущению позволяет существенно снизить динамическую ошибку
регулирования при условии правильного выбора и расчета
динамического устройства, формирующего закон изменения этого
воздействия.
Основой расчета подобных систем является принцип инва-
риантности: отклонение выходной координаты системы от заданного
значения должно быть тождественно равным нулю при любых
задающих или возмущающих воздействиях.
Для выполнения принципа инвариантности необходимы два
условия: идеальная компенсация всех возмущающих воздействий и
идеальное воспроизведение сигнала задания. Очевидно, что
достижение абсолютной инвариантности в реальных системах
регулирования практически невозможно. Обычно ограничиваются
частичной инвариантностью по отношению к наиболее опасным
возмущениям. Рассмотрим условие инвариантности разомкнутой и
комбинированной систем регулирования по отношению к одному
возмущающему воздействию.
Условие инвариантности разомкнутой и комбинированной АСР
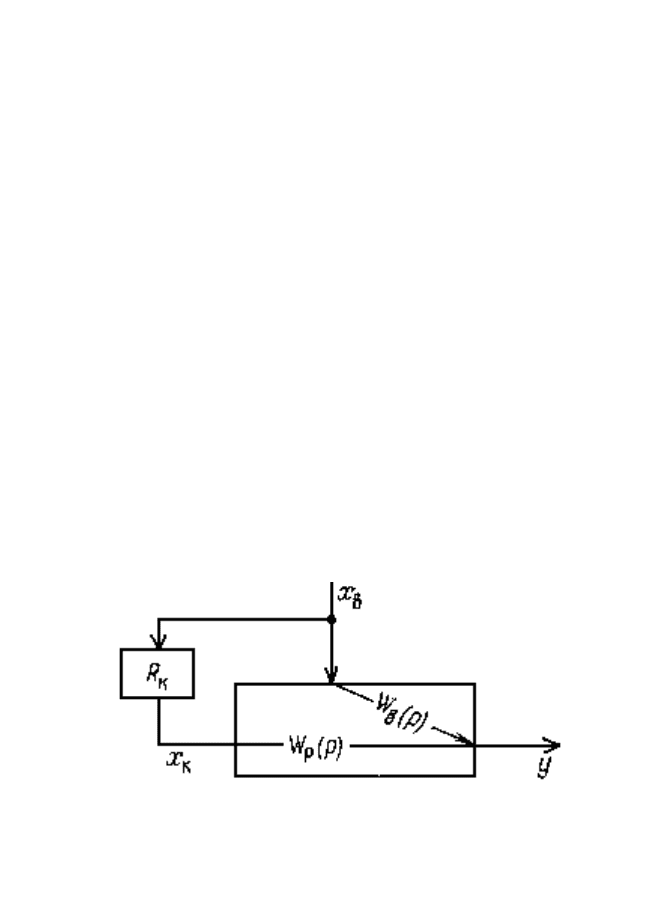
Рассмотрим условие инвариантности разомкнутой системы
(рис. 3.13): y(t)=0.
Рис. 3.13. Структурная схема разомкнутой АСР
Переходя к изображениям по Лапласу Х
В
(р) и Y(p) сигналов x
В
(t)
и y(t), перепишем это условие с учетом передаточных функций

объекта по каналам возмущения W
B
(p) и регулирования W
Р
(p) и
компенсатора R
K
(p):
Y (р) = Х
В
(р) [W
B
(р) + R
k
(Р) W
P
(p)] 0. (5)
При наличии возмущения [
0рХ
В
] условие инвариантности (5)
выполняется, если
W
B
(p) + R
k
(p)W
P
(р)=0, (5
a)
откуда
R
K
(
р
) = -W
В
(
р
)/W
Р
(
р
).
(6)
Таким образом, для обеспечения инвариантности системы
регулирования по отношению к какому-либо возмущению не-
обходимо установить динамический компенсатор, передаточная
функция которого равна отношению передаточных функций объекта
по каналам возмущения и регулирования, взятому с обратным знаком.
Выведем условия инвариантности для комбинированных АСР.
Для случая, когда сигнал от компенсатора подается на вход объекта
(см. рис. 3.11,a), структурная схема комбинированной АСР
преобразуется к последовательному соединению разомкнутой
системы и замкнутого контура (см. рис. 3.11,б), передаточные
функции которых соответственно равны:
рWрRрWрW
РkВРС
1
, (7)
)()(1
1
)(
pRpWp
pW
ЗС
.
(8)
При этом условие инвариантности (5) записывается в виде
.0
ЗС
1
рWрWрХрY
РСВ
(9)
Если X
B
(p) 0 и W
ЗС
(р) , должно выполняться условие
,0
1
рWрRрWрW
РkВРС
т. е. условие инвариантности (5 а).
При использовании комбинированной системы регулирования
(см. рис.3.12,а) вывод условий инвариантности приводит к
соотношениям (см. рис.3.12 ,б):
,0
2
рWрRрRрWрW
РkВРС
(7а)
)()(1
1
)(
pWрpR
pW
ЗС
(8а)
.0
ЗС
2
рWрWрХрY
РСВ
(9а)
Если X
B
(p) 0 и W
ЗС
(р) , то должно выполняться условие
,0
2
рWрRрRрWрW
ЗСkВРС
откуда
R
к
(р) = - W
В
(р) /[R(p)Wp(p)].
(6а)
Таким образом, при подключении выхода компенсатора на вход
регулятора передаточная функция компенсатора, полученная из
условия инвариантности, будет зависеть от характеристик не только
объекта, но и регулятора.
Условия физической реализуемости инвариантных АСР
Одной из основных проблем, возникающих при построении
инвариантных систем регулирования, является их физическая
реализуемость, т. е. реализуемость компенсатора, отвечающего усло-
виям (6) или (6а).
В отличие от обычных промышленных регуляторов, структура
которых задана и требуется лишь рассчитать их настройки, структура
динамического компенсатора полностью определяется соотношением
динамических характеристик объекта по каналам возмущения и
регулирования и может оказаться очень сложной, а при
неблагоприятном соотношении этих характеристик — физически
нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в сле-
дующих двух случаях.
1.Если время чистого запаздывания по каналу регулирования
больше, чем по каналу возмущения. В этом случае идеальный
компенсатор должен содержать звено упреждения, так как если
В
р
В
В
В
е
рА
рВ
рW
и
Р
р
Р
Р
Р
е
рА
рВ
рW
,
то с учетом (6)
РВ
р
РВ
РВ
К
е
рВрА
рАрВ
рR
При
0,
РВКВР
.
2. Если в передаточной функции компенсатора степень по-
линома в числителе больше, чем степень полинома в знаменателе. В
этом случае компенсатор должен содержать идеальные
дифференцирующие звенья. Такой результат получается при
определенном соотношении порядков дифференциальных уравнений,
описывающих каналы возмущения и регулирования. Пусть
W
В
(р) = В
в
(Р)/[A
B
(Р)] и Wp(p)= В
р
(Р)/[A
р
(Р)],
где В
в
(Р), А
В
(р), В
Р
(р), А
Р
(р) —полиномы степеней т
В
, n
B
, m
Р
и n
р
соответственно.
Тогда
рА
рВ
рВрА
рАрВ
рR
k
k
РВ
РВ
k
и
m
K
= m
B
+ n
p
;n
к
= n
в
+ m
р
.
Таким образом, условие, физической реализуемости инва-
риантной АСР заключается в том, чтобы выполнялись
соотношения
τ
в
≥ τ
р
и m
B
+ n
p
≤ n
в
+ m
р
. (10)
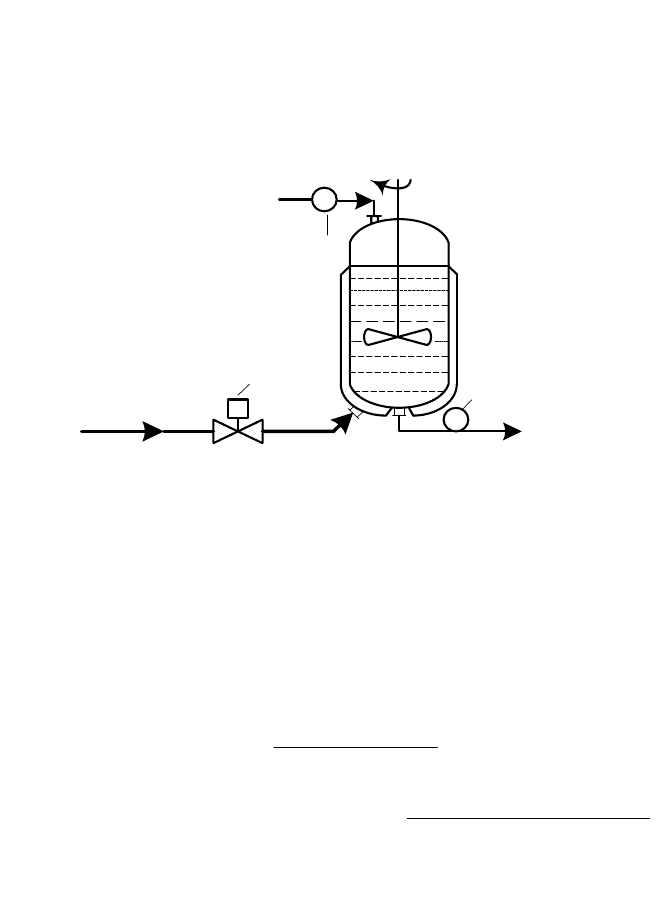
Пример. Рассмотрим систему регулирования температуры в
химическом, реакторе с перемешивающим устройством, в котором
протекает экзотермическая реакция (рис. 3.14).
FE
ТЕ
Продукция
реакции
Хладоагент
Реакционная
смесь
1
3
2
Рис. 3.14. Принципиальная схема химического реактора с
перемешивающим устройством: 1- измеритель температуры; 2 —
регулирующий клапан; 3 — измеритель расхода
Пусть основной канал возмущения — «расход реакционной
смеси — температура в реакторе» — аппроксимируется двумя
апериодическими звеньями первого порядка, а канал регулирования
— «расход хладоагента — температура в реакторе» — тремя
апериодическими звеньями первого порядка:
11
21
РР
В
В
ТТ
k
W
,
111
321
РРР
Р
ТТТ
k
рW
,
где T
1
, T
2
, Т
3
— наибольшие постоянные времени основных тепловых
емкостей реактора, термометра и охлаждающей рубашки.
Для построения инвариантной системы регулирования
согласовано выражению (6) необходимо ввести компенсатор с
передаточной функцией
1
ЗР
Р
В
k
Т
k
k
R
,
который физически нереализуем, так как в данном случае нарушается
условие (10), и компенсатор должен содержать идеальное
дифференцирующее звено.
Техническая реализация и расчет комбинированных АСР
При практической реализации разомкнутых и комбинированных
АСР обычно добиваются приближенной инвариантности системы по
отношению к рассматриваемому возмущению в наиболее опасном
диапазоне частот. При этом реальный компенсатор выбирают из числа
наиболее легко реализуемых динамических звеньев, параметры
которых рассчитывают из условия близости частотных характеристик
идеального [R
k
(iω)] и реального [
k
((iω)]компенсаторов в этом
диапазоне частот:
iRiR
kk
~
при
Н
В
(11)
При такой постановке задачи условие приближенной инва-
риантности примет вид
,0
iY
Н
В
,
(12)
причем в разомкнутой АСР
,
1
iWiХiY
РСВ
(13)
а в комбинированной системе регулирования
iWiWiХiY
ЗСРСВ
1
.
(14)
Диапазон [
ВН
,
] в разомкнутой АСР определяется
частотным спектром сигнала возмущения |X
B
(iω)|. В химико-
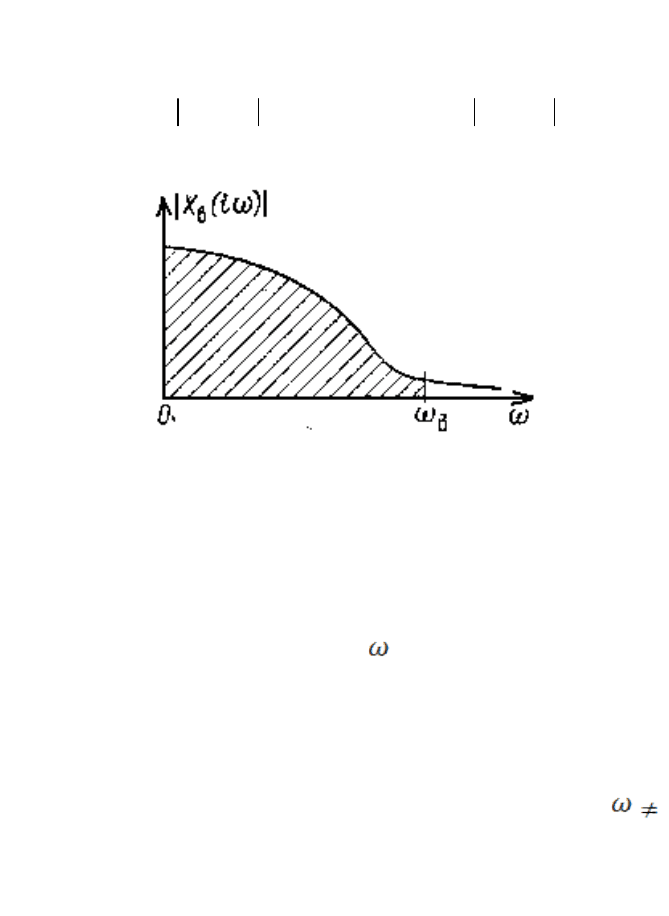
технологических процессах сигналы, как правило, являются
низкочастотными, и их мощность, в основном, сосредоточена в
диапазоне [0,ω
в
], т. е. (рис. 3.15)
0 0
22
.99,095,0 diХdiХ
ВВ
(15)
Рис. 3.15. Частотный спектр сигнала возмущения
Комбинированную АСР можно рассматривать как двухсту-
пенчатый фильтр для сигнала возмущения, состоящий из разомкнутой
АСР и замкнутого контура, который является фильтром для
определенных частот. Характерной особенностью замкнутой системы
регулирования является наличие пика на амплитудно-частотной
характеристике на рабочей частоте
р
(рис. 3.16), в окрестности
которой он обладает наихудшими фильтрующими свойствами.
Поэтому чаще всего условие приближенной инвариантности (11) для
комбинированных АСР записывается для двух частот: ω= 0 и ω= ω
Р
.
При этом компенсация возмущения на нулевой частоте обеспечивает
инвариантность системы в установившихся режимах, если А
зс
( ) 0
при ω= 0 (например, при использовании П-регулятора в замкнутом
контуре), или если
| Х
В
(iω)|→∞ при ω = 0 (например, при ступенчатых
возмущениях).
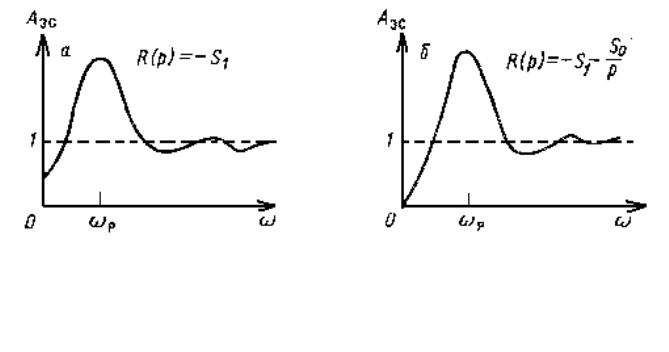
Рис. 3.16. Амплитудно-частотные характеристики замкнутой
системы с пропорциональным (а) и пропорционально-интегральным
регулятором (б)
Расчет комбинированных АСР включает в себя следующие
этапы:
1. Расчет настроенных параметров регулятора по отклонению и
определению рабочей частоты в одноконтурной АСР.
2. Вывод передаточной функции идеального конденсатора из
условия абсолютной инвариантности и анализ его реализуемости.
3. Выбор реального компенсатора и определение его
настроечных параметров из условия приближенной инвариантности в
наиболее существенном для системы в диапазоне частот. Перечень и
динамические характеристики типовых реальных компенсаторов для
выбора компенсатора по п.3, приведены в таблице 3.1.
Таблица 3.1
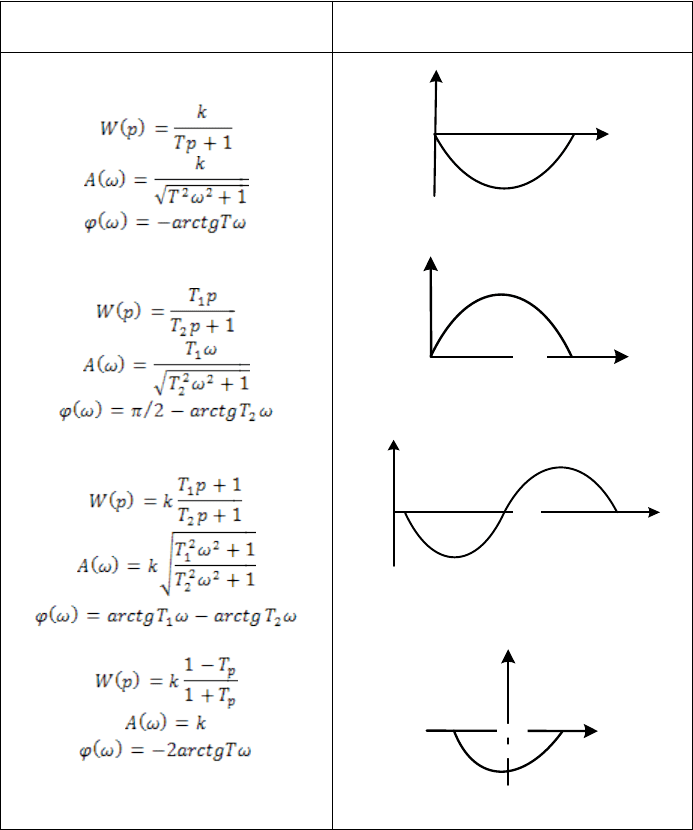
Динамические характеристики типовых компенсаторов
Тип и динамические
характеристики компенсаторов
График W(iω)
Апериодическое звено 1-го
порядка
ω→
к
ί Im
Re
(ω=0)
8
0
Реальное дифференцирующее
звено
(ω=0)
ί Im
Re
0
ω→
8
T1/T2
Интегро- дифференцирующее
звено
(ω=0)
ί Im
Re
0
ω→
8
kT1/T2
ω→
8
T1<T2
T1>T2
k
kT1/T2
Неминемально- фазовое звено
(
ω
=
0
)
Re
ί Im
ω
→
8
Примечание. Используя приведенные выше формулы (2), (4), (6)
и (6а) и данные таблицы 3.1 расчет каскадных и комбинированных
АСР следует проводить с помощью пакетов автоматизированного
проектирования по курсу ТАУ [4].
Приближенный расчет каскадных АСР можно выполнить с
применением графиков, приведенных на рис.3.7-3.10 [3,5].
Скорректировать результаты расчета можно путем моделирования
АСР на ЭВМ и проведением соответствующего машинного
эксперимента [6].
АСР с дополнительным импульсом по производной из
промежуточной точки
Такие системы обычно применяют при автоматизации объектов,
в которых регулируемый технологический параметр (например,
температура или состав) распределен по пространственной
координате (как в аппаратах колонного или трубчатого типа).
Особенность таких объектов состоит в том, что основной
регулируемой координатой является технологический параметр на
выходе из аппарата, возмущения распределены по длине аппарата, а
регулирующее воздействие подается на его вход. При этом
одноконтурные замкнутые АСР не обеспечивают должного качества
переходных процессов вследствие большой инерционности канала
регулирования.
Подача на вход регулятора дополнительного импульса из
промежуточной точки аппарата даёт опережающий сигнал, и
регулятор включается в работу прежде, чем выходная координата
отклонится от заданного значения.
Для того чтобы обеспечить регулирование без статической
ошибки, необходимо, чтобы в установившихся режимах допол-
нительный импульс исчезал. С этой целью вспомогательную
координату пропускают через реальное дифференцирующее звено, так
что входной сигнал регулятора равен y+y’
1
- y
o
(рис. 3.17,а). В
установившихся режимах, когда y’
1
= 0, при = 0, у=у°.