Drake G.W.F. (editor) Handbook of Atomic, Molecular, and Optical Physics
Подождите немного. Документ загружается.


607
Infrared Spect
40. Infrared Spectroscopy
Infrared spectroscopy consists of the measurement
of interactions of waves of the infrared (IR)part
of the electromagnetic spectrum with matter.
The IR spectrum starts just beyond the red
part of the visible spectrum at a wavelength
λ = 700 nm and extends to the microwave region
at λ = 0.1 cm. Electromagnetic waves are generally
described in terms of their frequency ν in Hz. In
IR spectroscopy it is common practice however
to use the spatial frequency σ = ν/c.Theseare
called wavenumbers and have units of cm
−1
.
In this way the near, mid and far IR spectrum
spans the frequencies from 14 300 cm
−1
to 10 cm
−1
.
The interactions observed in the IR spectrum
involve principally the energies associated
with molecular structure change. Infrared
spectroscopy is therefore useful for molecular
structure elucidation and the identification and
quantification of different molecular species in
asample[40.1].
The most common IR analysis of a sample
is by IR absorption spectroscopy. This involves
transmitting a beam of intense IR radiation
through the sample and observing the
distribution of wavenumbers absorbed by the
molecules. Molecules in a sample may also be
studied by IR emission spectroscopy simply by
observing specific wavenumbers being emitted
40.1 Intensities of Infrared Radiation........... 607
40.2 Sources for IR Absorption Spectroscopy .. 608
40.3 Source, Spectrometer, Sample
and Detector Relationship .................... 608
40.4 Simplified Principle of FTIR
Spectroscopy ....................................... 608
40.4.1 Interferogram Generation:
The Michelson Interferometer ..... 609
40.4.2 Description of Wavefront
Interference with Time Delay ...... 609
40.4.3 The Operation of Spectrum
Determination .......................... 610
40.5 Optical Aspects of FTIR Technology ........ 611
40.6 The Scanning Michelson
Interferometer .................................... 612
40.7 Recent Developments........................... 613
40.8 Conclusion .......................................... 613
References .................................................. 613
by virtue of the nonzero absolute temperature
of the sample. Finally, radiation reflected from
a smooth surface of a solid sample also provides
information about the molecular structure of the
material by virtue of the anomalous dispersion
associated with absorption bands.
40.1 Intensities of Infrared Radiation
For strong interactions of electromagnetic waves with
matter, the emitted and absorbed intensities are governed
by Planck’s radiation law in addition to the emissiv-
ity and absorptivity of the material. Planck’s radiation
law for thermal radiation from an ideal black body
is
P
bb
(σ) dσ =
c
1
σ
3
dσ
exp(hσ/k
B
T ) + 1
,
(40.1)
where c
1
is a proportionality constant. Depending on
the definition of c
1
, P
bb
(σ) may represent a radiation
density per unit spectral interval
cm
−1
in a cavity
at temperature T in ergs/cm
3
, or an energy flux emit-
ted from a surface in W/cm
2
steradians. At frequencies
low compared with h/k
B
T , the energy distribution in-
creases with σ
2
and is approximately proportional to
T at a given σ . At high frequency, the energy distri-
bution falls off exponentially. In the near IR, a high
temperature is required to emit radiation. Room tem-
perature objects emit strongest in the 300 to 600 cm
−1
region, and emit negligible energy above 3000 cm
−1
.
Materials cooled to liquid nitrogen temperature (77 K)
Part C 40

608 Part C Molecules
only emit below 100 cm
−1
, while materials cooled
to liquid helium temperature (4.2 K) only emit be-
low 20 cm
−1
. In contrast to visible spectroscopy, IR
absorption spectroscopyis complicated by emission of
IR radiation from the sample and the surrounding
environment.
40.2 Sources for IR Absorption Spectroscopy
A silicon carbide element electrically heated to 1400 K
provides a strong continuum of IR radiation over a ma-
jorpartoftheIR spectrum. It is commonly used as
a source of radiation for IR absorption spectroscopy.
For near IR spectroscopy, a tungsten filament lamp op-
erated at 2800 K provides a strong continuum all the
way up to the visible part of the spectrum; it is not
useful below 3000 cm
−1
because of absorption by the
glass or quartz envelope. Various electrically heated ce-
ramic elements, such as the Nernst glower and high
temperature carbon rods, have been devised to serve as
IR sources.
40.3 Source, Spectrometer, Sample and Detector Relationship
Since a sample at room temperature emits IR radiation
in the mid IR, it is important to distinguish between
transmitted radiation used in the determination of its
absorption spectrum and its emission spectrum. By em-
ploying an intense IR beam, the effect of emission is
minimized. Further distinction is achieved by encoding
the IR beam before it impinges on the sample.
With classical grating or prism spectrometers, the
source radiation is chopped by means of a mechani-
cal chopper before it passes through the sample. The
IR detector is provided with a means of synchronously
decoding the chopped signal, thereby eliminating the
emitted spectrum. Often the chopper is arranged such
that it alternately switches between an empty reference
beam and the sample. The logarithm of the ratio of the
demodulated sample and reference spectra provides the
absorption spectrum directly.
In Fourier Transform infrared (FTIR) Spectroscopy,
a scanning Michelson interferometer provides the en-
coding function directly and no chopper is required. The
interferometer is commonly placed before the sample so
that it does not encode the thermally emitted radiation
of the sample. Ratio recording of a sample against an
empty beam is not common in FTIR. Instead, the ab-
sorption spectrum is obtained by sequentially recording
the spectra of the sample and of the empty beam (sam-
ple removed), and computing the logarithm of the ratio
numerically.
If it is not convenient to place the sample after the
scanning Michelson interferometer, the absorption spec-
trum of a sample placed in front of the interferometer
can be deduced by subtracting the separately recorded
emission spectrum from the combined transmission plus
emission spectrum.
Infrared emission and reflection spectroscopy form
the basis for remote sensing. Solid and gaseous (cloud)
objects may be identified and quantified by direct obser-
vation of their IR spectra at a distance. Gaseous clouds
reflect poorly, providing only transmitted or emitted IR
radiation. Their emission spectrum is contrasted directly
with the spectrum of the scene or object beyond the
cloud. With a background at lower temperature than the
gas cloud, the gas spectrum appears in emission, while
with a warmer background the gas spectrum appears in
absorption.
Only a few solid materials transmit IR radiation
over a substantial thickness. Remote sensing of solid
objects relates therefore to surface emission and (dif-
fuse) reflection of IR radiation from the surrounding
environment.
40.4 Simplified Principle of FTIR Spectroscopy
In FTIR spectroscopy, the spectrum of a beam of in-
cident IR radiation is obtained by first generating and
recording an interferogram with a scanning Michel-
son interferometer. Subsequently the interferogram is
inverted by means of a cosine Fourier transform into the
spectrum.
Part C 40.4
Infrared Spectroscopy 40.4 Simplified Principle of FTIR Spectroscopy 609
40.4.1 Interferogram Generation:
The Michelson Interferometer
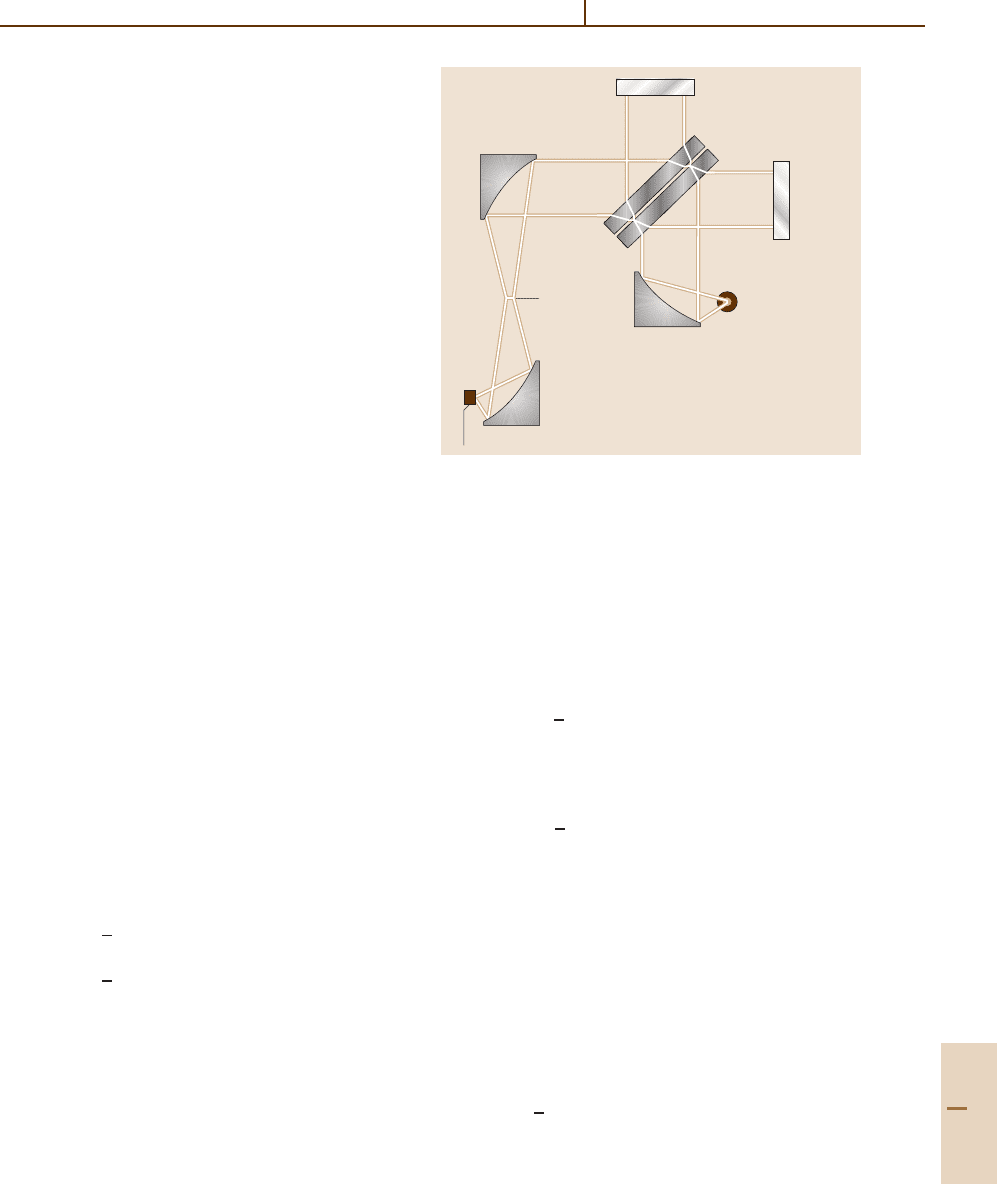
The scanning Michelson interferometer shown in
Fig. 40.1 consists of a beam splitter, which is a sub-
strate with a dielectric coating such that 50% of an
incident beam is reflected and the remaining 50% is
transmitted, and two plane mirrors (M
1
and M
2
), one
or both of which are translated along the direction of
the beam. After splitting, the two equal amplitude wave
fronts are propagated along different optical paths. The
mirrors at the end of each path return the wavefronts
to the beamsplitter, which then acts as a wavefront
combiner. Because of their common coherent origin,
the wavefronts interfere with one another when they
combine. The state of interference is varied by scan-
ning one or both of the mirrors such that there is
a variable time delay between the two separated beams.
The resulting intensity variation of the combined out-
put beam as a function of relative time delay is the
interferogram.
40.4.2 Description of Wavefront
Interference with Time Delay
The intensity I
0
(ν) at frequency ν of a plane wave in
space is given by the expectation value of its elec-
tric field vector E(ν, t) = E (ν) exp(i2πνt) according
to
I
0
(ν) =E(ν, t)|E(ν, t)=E (ν)
2
. (40.2)
The intensity at the output of the interferometer due
to an incident intensity I
0
(ν) is given by I(ν, δ),
where δ is the time delay between the two wavefronts
which have been propagated along two different paths,
and
I(ν, δ) =E(ν, t)+E(ν, t+δ)|E(ν, t)+E(ν, t + δ)
=
1
4
E (ν)
2
2 + e
−i2πνδ
+ e
i2πνδ
=
1
2
I
0
(ν)[1 + cos(2πνδ)] . (40.3)
As can be seen, the output intensity of a single frequency
source at the output of an ideal scanning Michelson
interferometer fluctuates sinusoidally between zero and
the input intensity I
0
(ν) as the time delay δ between the
separated wavefronts is varied by means of scanning one
of the mirrors.
The quantity δ is related to mirror displacement x
with respect to equal distance of the mirrors from the
M
2
Fixed mirror
Compensator
Beam splitter
M
1
Moving
mirror
Source
Collimator
Detector
Sample
focus
Fig. 40.1 The Michelson interferometer
beamsplitter by
δ = 2x cos θ/c ,
(40.4)
where θ is the angle between the wavefront and the
optical axis of the spectrometer, and the optical axis is
the normal to each plane mirror M
1
and M
2
.Fromthis,
(40.3) becomes
I
0
(ν, x) =
1
2
I
0
(ν){1 + cos[2πν(2x cos θ/c)]} ,
(40.5)
or, using σ = ν/c,
I
0
(σ, x) =
1
2
I
0
(σ){1 + cos[2πσ(2x cos θ)]} . (40.6)
Thus the output intensity fluctuates at frequency σ
=
2σ cos θ as a function of the mirror displacement x.
The incident intensity generally consists of a distri-
bution of intensities over many frequencies S(ν) dν with
integrated intensity
I
0
=
S(ν) dν. (40.7)
For this case, the output intensity of an ideal scanning
Michelson interferometer is given by
I
0
(δ) =
1
2
S(ν)[1 + cos(2πνδ)] dν.
(40.8)
The second term on the right side of (40.8)hasthe
form of the cosine Fourier transform of the spectrum.
Part C 40.4
610 Part C Molecules
By rearrangement of (40.8), it is given by
S(ν) cos(2πνδ) dν = 2I
0
(δ) − I
0
. (40.9)
The constant term I
0
provides no useful information
about the spectrum. The inverse cosine Fourier trans-
form of 2I
0
(δ) results in the spectrum S(ν) according
to
S(ν) =
2I
0
(δ) cos(2πνδ) dδ, (40.10)
S(σ) =
2I
0
(x) cos
2πσ
x
dx . (40.11)
Contrary to classical spectrometers, where the spec-
trum is sequentially scanned, there is no segregation of
frequencies of the input intensity. All frequencies in the
source are modulated simultaneously by the scanning
Michelson interferometer into a single interferogram
signal. This multiplex mode of spectrum determination
was first exploited by Felgett [40.2]. It contributes to
a large advantage in sensitivity compared with other
spectrometers, and is referred to as the Felgett or multi-
plex advantage.
40.4.3 The Operation of Spectrum
Determination
The output interferogram is detected by an IR detector
which converts the intensity variations I
0
(x) as a func-
tion of different mirror positions x into an electrical
signal. Continuous determination of the inverse cosine
Fourier transform of the evolving interferogram re-
quires continuous multiplication of the signal by cosine
functions with all the different frequencies of the spec-
trum and integrating these products. Continuous Fourier
analysis with a bank of narrow band filters has been
implemented both in analog and digital form in early
versions of FTIRs [40.3].
It is, however, far more practical to capture the in-
terferogram signal in numeric form, using an analog to
digital converter, store it in computer memory, and com-
pute the Fourier transform numerically after the mirror
displacement range has been covered.
The numerical representation of the interferogram is
determined at known intervals of mirror displacement
∆x. The computed spectrum is then determined at reg-
ular intervals of spatial frequency ∆σ by the discrete
cosine Fourier transform
S( j∆σ) =
n
2I
0
(n∆x) cos(2π jn∆σ∆x).
(40.12)
The sampling interval ∆x of optical path difference
determines the extent of the numerically computed spec-
trum. A higher density of sampling permits a wider
spectral range to be determined, up to
σ
max
=
1
2∆x
.
(40.13)
Beyond σ
max
, the spectrum repeats in reverse order,
and beyond 2σ
max
, the spectrum repeats as is. This is
called spectral aliasing, and results from the incomplete
knowledge of the full interferogram function between
the discrete numeric representation. In order to insure
that the numeric representation of the interferogram
describes the continuous function uniquely, it is im-
portant to band limit the interferogram information to
the range 0 to σ
max
by means of optical and electrical
filtering.
Conversely, the higher the density of sampling
in the spectral domain, the longer the interferogram
needs to be. For a wavenumber range ∆σ , the length
is
x
max
=
1
2∆σ
.
(40.14)
From the orthogonality property of the discrete
cosine Fourier transform, unique linearly independent
information can occur only at spectral intervals equal
to or greater than the sampling interval. Hence the
sampling interval in the spectrum is related to the
achievable resolution. The full width at half maxi-
mum of the representation of a single frequency in
the spectrum is 1.2∆σ . This factor applies for the
case where the single cosine wave interferogram has
been abruptly truncated at the end of the mirror scan.
The lineshape function for this case is quite oscilla-
tory due to the abrupt termination of the interferogram
signal at the end of the scan. This is not always sat-
isfactory, and frequently the interferogram is modified
by a windowing or apodization function to make the
lineshape more localized and monotonic. Apodization
always results in an increase in the full width at half
maximum.
A particularly convenient and accurate way to estab-
lish the sampling intervals of the interferogram is the use
of a single frequency laser directed coaxially with the
source radiation through the scanning Michelson inter-
ferometer. The intensity of the laser at the output of the
interferometer is a highly consistent cosine wave with
one cycle per change in mirror movement of one half
wavelength of the laser light.
Part C 40.4
Infrared Spectroscopy 40.5 Optical Aspects of FTIR Technology 611
40.5 Optical Aspects of FTIR Technology
The description of wavefront interference developed
in Sect. 40.4.2 applies to interference of plane wave
fronts only. A plane wave of IR radiation is ob-
tained at the output of a collimator optics having
an IR point source at its focus. In practice a point
source has insignificant intensity. A finite size source,
which may be represented by a distribution of point
sources in the focal plane of the collimator, provides
a distribution of plane wavefronts with different an-
gles of propagation through the scanning Michelson
interferometer.
Asshownin(40.6), this distribution of angles re-
sults in a distribution of modulation frequencies as
a function of mirror displacement x of the output in-
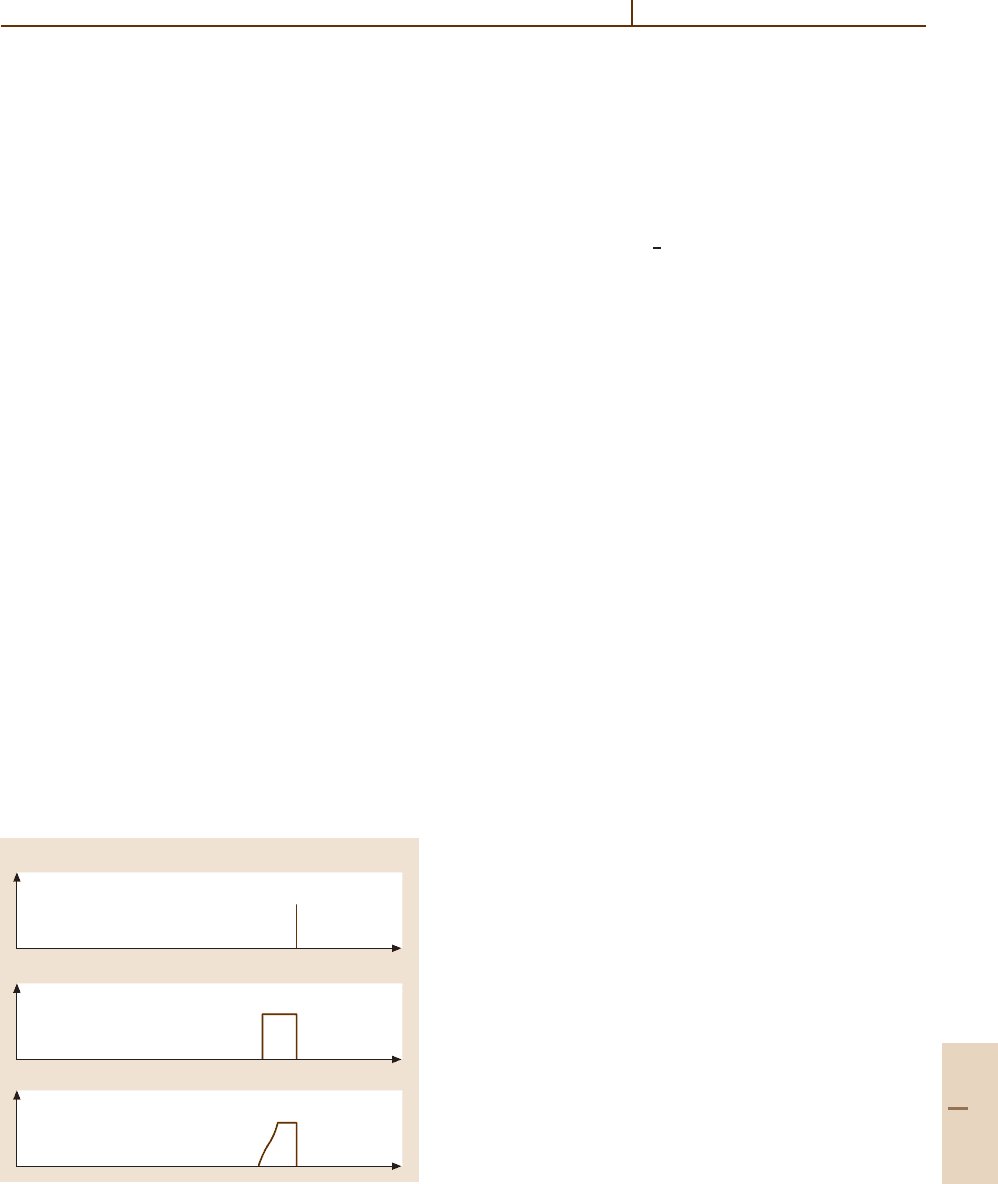
tensity for a given IR wavenumber. This is illustrated
in Fig. 40.2 which shows, for a single frequency IR
source, the distribution of output intensity modulation
frequencies for an ideal point source on the optical axis,
a circularly symmetric distribution of uniform intensity
about the optical axis, and finally a circularly symmet-
ric distribution positioned slightly off the axis of the
collimator.
As a result of illuminating the scanning Michel-
son interferometer with a finite size source, a single
IR frequency source is observed having a distribution
of modulation frequencies in its interferogram signal.
This distribution limits the ability to resolve two closely
spaced IR frequencies and determines the optical res-
olution limit of the FTIR: The larger the extent of the
source, the more restricted the resolution becomes. The
ratio σ/∆σ is the resolving power R of the scanning
a)
Point source on optical axis
b)
Circular source centered on optical axis
c)
Circular source off axis or out of focus
Michelson interferometer and, based on (40.6), is given
by
R = 1/(1 − cos θ
m
), (40.15)
where θ
m
is the maximum off-axis angle of illumination.
For small θ
m
,cosθ
m
≈ 1 −
1
2
θ
2
m
,sothat
R ∼ 2/θ
2
m
. (40.16)
From (40.14), a resolution limit is also imposed by
the maximum length of the interferogram recorded.
The interferogram length dependent resolution is
constant for all spectral regions, while the optical
resolution is proportional to the spectral frequency.
Both resolution limits combine to give the over-
all resolution of an FTIR. At low resolution, the
available throughput is so high that the optical res-
olution is often negligible compared with the length
resolution. At high resolution, throughput is at a pre-
mium and the optical resolution is often closely
matched to the length resolution at the frequency of
interest.
To insure a symmetrical frequency distribution,
the area integrated illumination must increase as
sin θ, which is approximately linear for small an-
gles, up to its maximum θ
m
, as shown with the
centered circular illumination in Fig. 40.2. Any devi-
ation from this, such as off-axis positioning of the
circle, noncircular shapes, or a poorly focused cen-
tered symmetrical circle, will result in a gradual roll-off
of the distribution on the low frequency side only
[40.4]. This results in an asymmetric spectral line
shape.
For a collimator of given focal length and for a given
resolving power, it is easily shown that the area of the
source, or the stop that delineates it, is much larger than
the slit area for classical grating spectrometers. This is
particularly the case at high resolving powers.
This throughput advantage was first pointed out by
Jacquinot [40.5], and plays an important role in the large
sensitivity advantage of FTIR. The stop that delineates
the source extent for a scanning Michelson interferom-
eter is often referred to as the Jacquinot stop or the field
of view stop.
Fig. 40.2 Distribution of interferogram modulation fre-
quencies for a single optical frequency source
Part C 40.5

612 Part C Molecules
40.6 The Scanning Michelson Interferometer
Optical throughput is not only determined by the area of
the field of view stop, but also the solid angle subtended
by the rays traversing this area. The solid angle Ω of
rays traversing a Jacquinot stop positioned in the focal
plane of an input collimator is given by the ratio of the
interferometer beam area divided by the square of the
focal length of the collimator.
For a given collimator focal length, the area of the
Jacquinot stop is inversely proportional to the resolving
power. To maintain equal throughput, the area of the
interferometer optics should be increased as resolving
power is increased in order to offset the decrease in the
Jacquinot stop area.
It is common to construct interferometers with
2.5 cm diameter optics for resolving powers up to 5000,
5.0 cm diameter optics for resolving powers up to 40 000
and 7.5 cm diameter optics for resolving powers up to
1 000 000.
In order to obtain a uniform state of interference
across the entire beam of the interferometer, the beam-
splitter substrate and the two mirrors must be flat to
within a small fraction of the wavelength used. Also,
these elements must be oriented correctly so that the op-
tical path difference error across the beam is less than
a small fraction of the wavelength.
Figure 40.1 shows two substrates at the beam-
splitter position. One of the substrates supports the
beamsplitting coating, while the companion substrate
of precisely the same thickness acts as a compensat-
ing element to insure identical optical paths through
the two arms of the interferometer. To avoid sec-
ondary interference effects, both beamsplitter and
compensator substrates are normally wedged. The di-
rection of the wedges of the two substrates must be
aligned again to insure symmetry in both arms of the
interferometer.
The maintenance of a very close orientational align-
ment tolerance of the two mirrors with respect to the
beamsplitter in a stable manner over time and while
scanning one of the mirrors is the greatest challenge of
interferometer design and is also the greatest weakness
of FTIR.
In early models of FTIRs, alignment was maintained
by means of a stable mechanical structure and a highly
precise linear air bearing for the scanning mirror. Sat-
isfactory operation required a stable environment and
frequent alignment tuning and could be achieved for
mirror displacements of only several centimeters, thus
limiting the maximum resolution.
Different techniques have been developed to over-
come this weakness in FTIR. The two most prominent
are (1) Dynamic alignment of the interferometer, where
optical alignment is servo-controlled using the refer-
ence laser not only for mirror displacement control
but also for mirror orientation control, and (2) the
use of cube corner mirrors in place of the flat mir-
rors in the interferometer. Dynamic alignment has the
advantage of retaining a high degree of simplicity in
the optical design of the interferometer. On the other
hand it is more complex electronically. Cube corners
have the property of always reflecting light 180
◦
to in-
cident light independent of orientation. Cube corners
always insure wavefront parallelism at the point of re-
combination of the two beams in the interferometer.
Cube corners lack a defined optical axis. In a cube
corner interferometer, the optical axis is defined as
the direction in which the wavefronts undergo zero
shear.
The scanning Michelson Interferometer is normally
provided with a drive mechanism to displace one of the
mirrors precisely parallel to its initial position and at
uniform velocity. The uniform velocity translates the
mirror displacement dependent intensities into time de-
pendent intensities. This facilitates signal processing
electronics. In some measurement scenarios however,
where the sample spectrum may vary with time, it
is undesirable to deal with the multifrequency time-
varying intensities of the interferogram signal. In this
case it is preferable to scan the moving mirror in
a stepwise mode, where the mirror is momentarily sta-
tionary at the time of signal measurement and then
advanced rapidly to the next position. The mirror scan
velocity v can be varied so that electrical signals can
have different frequencies for the same optical frequen-
cies:
f = σ/2v.
(40.17)
The scan velocity is normally selected to provide the
most favorable frequency regime for the detector and
electronics used and for the mechanical capabilities
of the mirror drive. Typically the velocity range is
from 0.05 cm/sto4cm/s, putting the frequencies in
the audio range. At these velocities, the measurement
scan may be completed in a shorter time than is de-
sired for signal averaging purposes. In this case it is
common to repeat the scan a number of times and
add the results together: this is called co-adding of
scans.
Part C 40.6

Infrared Spectroscopy References 613
40.7 Recent Developments
Added by Mark M. Cassar. Infrared spectromicroscopy,
which combines the well-established technique of
Fourier transform infrared (FTIR) spectroscopy with a
microscope, has been one of the main developments in
this area in the past decade. Recently, array detectors
have made infrared imaging practical and quick. The
brightness attainable in an IR spectromicroscope has
also been enhanced through the use of a synchrotron
radiation (SR) source, allowing the source beam to be
focused to a spot with a diameter ≤ 10 µm [40.6]. This
also allows, because of the high signal-to-noise ratio, the
measurement of dilute sample concentrations. One im-
portant application of SR-FTIR microscopy is to study
the effects of various stimuli on biomolecules in order
to understand how diseases start and spread [40.7, 8].
A testament to the robustness and versatility of
FTIR is given by its potential inclusion in future Mars
expeditions [40.9].
40.8 Conclusion
The modern technique of Fourier transform IR spec-
troscopy has evolved rapidly from its beginnings in
the early 1950s to being the dominant technique of
IR spectroscopy in many diverse disciplines. The As-
pen Conference on Fourier Spectroscopy in 1970 was
the watershed for FTIR, where many fundamental is-
sues of the technique were treated [40.10]. A practical
book by Griffith and de Haseth gives many examples of
applications of FTIR [40.11].
FTIR is a powerful technique for infrared spec-
troscopy. It has a large sensitivity advantage over
conventional dispersive spectrometers because of the ef-
ficient multiplexing of all the spectral elements and the
greater throughput of the Jacquinot stop. It can be used
efficiently for resolving powers from less than 1000 up
to 1 000 000. FTIR combines techniques of optical inter-
ferometry, laser metrology and digital signal processing.
The computation of the cosine Fourier transform
was initially a daunting task. Today, with highly
efficient factoring algorithms brought to FTIR by
Forman [40.12], and the widespread availability of in-
expensive high performance personal computers, the
computation time for a Fourier transform is only
a fraction of a second per 1000 data points in the
interferogram.
A traditional weakness of FTIR is the severe
demand of alignment stability and accuracy of the
scanning Michelson interferometer. Newer optical
designs and control procedures have largely over-
come this weakness. Now FTIR can be justified
not only for its high sensitivity but also for its
high degree of reproducibility and stability, per-
mitting demanding applications in quantitative IR
analysis.
References
40.1 N. B. Colthup, L. H. Daly, S. E. Wiberley: Introduc-
tion to Infrared, Raman Spectroscopy (Academic,
New York 1990)
40.2 P. B. Fellgett: J. Phys. Radium 19, 187, 237 (1958)
40.3 J. E. Hoffman, G. A. Vanasse: J. Phys. (Paris) 28,
C2:79 (1967)
40.4 P. Saarinen, J. Kauppinnen: Appl. Opt. 31,2353
(1992)
40.5 P. Jacquinot: J. Opt. Soc. Am. 44,761(1954)
40.6 M. C. Martin: Synchrotron Radiation News 15,10
(2002)
40.7 H.-Y. N. Holman, M. C. Martin, W. McKinney:
Spectroscopy – An International Journal 17,139
(2003)
40.8 H.-Y. N. Holman, K. A. Bjornsted, M. P. McNa-
mara, M. C. Martin, W. R. McKinney, E A. Blakely:
J. Biomed. Opt. 7, 417 (2002)
40.9 M S. Anderson, J. M. Andringa, R. W. Carlson,
P. Conrad, W. Hartford, M. Shafer, A. Soto,
A. I. Tsapin, J. P. Dybwad, W. Wadsworth, K. Hand:
Rev. Sci. Instr. 76, 034101 (2005)
40.10 G. A. Vanasse, A. T. Stair, D. J. Baker (Eds.): Aspen
International Conference on Fourier Spectroscopy,
1970, AFCRL-71-0019
40.11 P. R. Griffith, J. A. de Haseth: Fourier Transform In-
frared Spectrometry, J. Biomed. Opt., Vol. 83 (Wiley
Interscience, New York 1986)
40.12 M. L. Forman: J. Opt. Soc. Am. 56, 978 (1966)
Part C 40

615
Laser Spectros
41. Laser Spectroscopy in the Submillimeter
and Far-Infrared Regions
Recent technical developments in sub-millimeter
and far-infrared laser spectroscopy are described.
This includes new laser sources, both side-band
and difference-frequency generation. An exper-
iment which uses fixed-frequency far-infrared
lasers to study open-shell molecules (free rad-
icals) is described; the technique is known as
laser magnetic resonance (LMR). Sub-millimeter
and far-infrared laser spectroscopies are finding
expensive use in the detection and monitoring
of molecules in astrophysical sources and in the
earth’s atmosphere.
41.1 Experimental Techniques
using Coherent SM-FIR Radiation .......... 616
41.1.1 Tunable FIR Spectroscopy
with CO
2
Laser Difference
Generation in a MIM Diode......... 617
41.1.2 Laser Magnetic Resonance.......... 618
41.1.3 TuFIR and LMR Detectors............. 619
41.2 Submillimeter and FIR Astronomy ......... 620
41.3 Upper Atmospheric Studies ................... 620
References .................................................. 621
Research in the submillimeter and far-infrared (SM-FIR)
regions of the electromagnetic spectrum (1000 to
150 µm, 0.3to2.0 THz; and 150 to 20 µm, 2.0
to 15 THz, respectively) had been relatively inac-
tive until about 30 years ago. Three events were
responsible for enhanced activity in this part of
the electromagnetic spectrum: the discovery of far-
infrared (FIR) lasers [41.1], the development of
background-limited detectors [41.2], and the inven-
tion of the FIR Fourier transform (FT) spectrom-
eter [41.3]. Following these developments major
discoveries have taken place in laboratory spectro-
scopic studies [41.4, 5], in astronomical observa-
tions [41.6], and in spectroscopic studies of our upper
atmosphere [41.7].
Rotational transition frequencies of light molecules
(such as hydrides) lie in this region, and the associ-
ated electric dipole transitions are especially strong at
these frequencies. In fact they are 10 000 times stronger
than at microwave frequencies because they are 100
times typical microwave frequencies and their peak
absorptivities depend approximately on the square of
the frequency. Fine structure transitions of atoms and
molecules also lie in this region; however, they are
much weaker, magnetic dipole transitions. The obser-
vation of fine structure spectra is very important in
determining atomic concentrations in astronomical and
atmospheric sources and for determining the local phys-
ical conditions. Bending frequencies of larger molecules
also lie in this region, but their transitions are not as
strong as rotational transitions (typically a factor of
10
3
weaker).
Spectral accuracy has been increased by several or-
ders of magnitude with the extension of direct frequency
measurement metrology into the SM-FIR region [41.8].
Transitions whose frequencies have been measured
(including absorptions and laser emissions) are use-
ful wavelength calibration sources (λ
vac
= c/ν)for
FT spectrometers. FIR spectra of a series of rota-
tional transitions have been measured in CO [41.9],
HCl [41.10], HF [41.11], and CH
3
OH [41.12]tobe
used for FT calibration standards. These lines are ten
to a hundred times more accurately measured than
can be realized in present state-of-the-art Fourier trans-
form spectrometers; thus, they are excellent calibration
standards. High-accuracy and high-resolution spec-
troscopy has permitted the spectroscopic assignment of
the SM-FIR lasing transitions themselves [41.13]re-
sulting in a much better understanding of the lasing
process.
Astronomical spectroscopy in this region [41.6]may
be in emission or absorption and is performed using
either interferometric [41.14] (wavelength-based), or
heterodyne (frequency-based) [41.15] techniques to re-
solve the individual spectral features.
Most high resolution spectra of our upper atmos-
phere have been taken with FT spectrometers flown
above the heavily absorbing water vapor region in the
lower atmosphere. Emission lines are generally observed
in these spectrometers [41.7].
Part C 41

616 Part C Molecules
41.1 Experimental Techniques using Coherent SM-FIR Radiation
The earliest sources of coherent SM radiation came
from harmonics of klystron radiation generated in
point-contact semiconductor diodes [41.16]. Spectro-
scopically useful powers up to about one terahertz are
produced. This technique is being replaced by electronic
oscillators which oscillate to over one terahertz [41.17].
The group at Cologne University, Germany [41.18]has
been particularly successful with this approach. Spec-
troscopy above this frequency generally is performed
with either lasers or FT spectrometers (see Chapt. 40).
Laser techniques use either tunable radiation
synthesized from the radiation of other lasers, or fixed-
frequency SM-FIR laser radiation and tuning of the
transition frequency of the species by an electric or
magnetic field. Spectroscopy with tunable far-infrared
radiation is called TuFIR spectroscopy. Spectroscopy
MIM diode
Lens
Microwave
synthesizer
(Third-order
TuFIR only)
Absorption cell
FIR
detector
Iris
v
FIR
v
1
v
w
Lenses
Iris
CO
2
line identifier
HgCdTe
detector
v
w
v
2
Iris Lens
Iris
Lenses
AOM
v
1
v
2
v
w
CO
2
laser 1
CO
2
laser 2
Waveguide
CO
2
laser
PZT
PZT
PZT
AOM
CO
2
Reference
cells
InSb
detector
InSb
detector
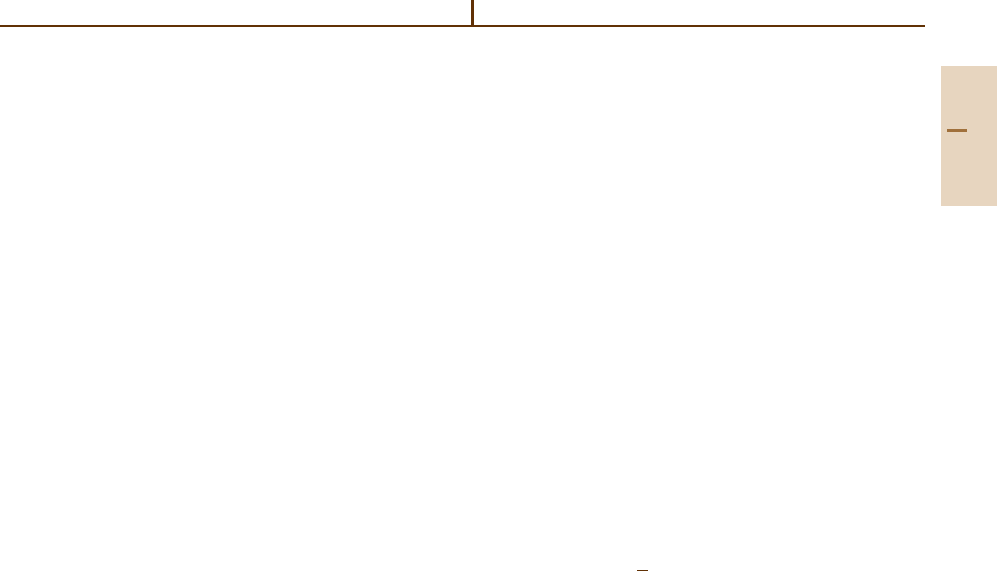
Fig. 41.1 Tunable far-infrared (TuFIR) spectrometer for second- or third-order operation using CO
2
laser difference-
frequency generation in the MIM diode
with fixed frequency lasers is called either laser electric
resonance (LER) or laser magnetic resonance (LMR).
LMR is applicable only to paramagnetic species and
is noteworthy for its extreme sensitivity. LMR spec-
troscopy has been more widely applied than LER,and
is discussed in this chapter.
Tunable SM-FIR radiation has been generated ei-
ther by adding microwave sidebands to radiation from
a SM-FIR laser [41.19]orbyusingapairofhigher
frequency lasers and generating the frequency differ-
ence [41.20]. The sideband technique was first reported
by Dymanus [41.19] and uses a Schottky diode as
the mixing element. It has been used up to 4.25 THz
and produces a few microwatts of radiation [41.21].
Groups at Berkley, California [41.22] and Cologne, Ger-
many [41.23] have developed this technique to good
Part C 41.1
Laser Spectroscopy in the Submillimeter and Far-Infrared Regions 41.1 Experimental Techniques using Coherent SM-FIR Radiation 617
effect. The CO
2
laser frequency-difference technique
with difference generation in the metal-insulator-metal
(MIM) diode covers the FIR region out to over
6 THz and produces about 0.1 µW. This technique uses
fluorescence-stabilized CO
2
lasers whose frequencies
have been directly measured, and it is about two orders of
magnitude more accurate than the sideband technique.
However, it is somewhat less sensitive because of the
decreased power available. There are several review ar-
ticles on the laser sideband technique [41.21, 24], and
only the laser difference technique is described here.
41.1.1 Tunable FIR Spectroscopy with CO
2
Laser Difference Generation in a MIM
Diode
There are two different ways of generating FIR radiation
using a pair of CO
2
lasers and the MIM diode. One is by
second-order generation, in which tunability is achieved
by using a tunable waveguide CO
2
laser as one of the
CO
2
lasers; it is operated at about 8 kPa (60 Torr) and
is tunable by about ±120 MHz. The second technique
uses third-order generation, in which tunable microwave
sidebands are added to the difference frequency of the
two CO
2
lasers. The complete spectrometer which can
be operated in either second or third order is shown in
Fig. 41.1.
The FIR frequencies generated are:
second-order: ν
fir
=
ν
1,CO
2
−ν
W,CO
2
(41.1a)
third-order: ν
fir
=
ν
1,CO
2
−ν
W,CO
2
±ν
mw
(41.1b)
where ν
fir
is the tunable FIR radiation, ν
1,CO
2
and ν
W,CO
2
are the CO
2
laser frequencies, and ν
mw
is the microwave
frequency.
Different MIM diodes are used for the two differ-
ent orders: in second-order, a tungsten whisker contacts
a nickel base and the normal oxide layer on nickel serves
as the insulating barrier; in third-order, a cobalt base with
its natural cobalt oxide layer is substituted for the nickel
base. The third-order cobalt diodes produce about one
third as much FIR radiation in each sideband as there is
in the second-order difference; hence third-order gener-
ation is not quite as sensitive as second-order. The much
larger tunability, however, makes it considerably easier
to use.
The common isotope of CO
2
is used in both the
waveguide laser and in laser 2; in laser 1, one of four iso-
topic species is used. Ninety percent of all frequencies
from 0.3to4.5 THz can be synthesized; the coverage
decreases between 4.5and6.3 THz. Ninety megahertz
acoustooptic modulators (AOMs) are used in the output
beams of the two CO
2
lasers which irradiate the MIM
diode; they increase the frequency coverage by an ad-
ditional 180 MHz and isolate the CO
2
lasers from the
MIM diode. This isolation decreases amplitude noise in
the generated FIR radiation, caused by the feedback to
the CO
2
laser from the MIM diode, by an order of mag-
nitude; hence, the spectrometer sensitivity increases by
an order of magnitude.
The radiations from laser 1 and the waveguide laser
are focused on the MIM diode. Laser 2 serves as a fre-
quency reference for the waveguide laser; the two lasers
beat with each other in the HgCdTe detector and a ser-
vosystem offset-locks the waveguide laser to laser 2.
Lasers 1 and 2 are frequency modulated using piezoelec-
tric drivers on the end mirrors, and they are servoed to
the line center of 4.3 µm saturated fluorescence signals
obtained from the external low-pressure CO
2
reference
cells. In both second and third order, the CO
2
reference
lasers are stabilized to line center with an uncertainty
of 10 kHz. The overall uncertainty in the FIR frequency
due to two lasers is thus
√
2 × 10 or 14 kHz. This number
was determined experimentally in a measurement of the
rotational frequencies of CO out to J = 38 (4.3THz),
with the analysis of the data set determining the molecu-
lar constants [41.9].
The CO
2
radiation is focused by a 25 mm focal
length lens onto the conically sharpened tip of the 25 µm
diameter tungsten whisker. The FIR radiation is emitted
from the 0.1 to 3 mm long whisker in a conical long-
wire antenna pattern. Then it is collimated to a polarized
beam by a corner reflector [41.25] and a 30 mm focal
length off-axis segment of a parabolic mirror.
The largest uncertainty in the measurement of a tran-
sition frequency comes from finding the centers of the
Doppler broadened lines. This is about 0.05 of the line
width for lines observed with a signal-to-noise ratio of
50 or better and corresponds to about 0.05 to 0.5MHz.
A linefitting program [41.26] improves the line center
determinations by nearly an order of magnitude. The FIR
radiation is frequency modulated due to a 0.5to6MHz
frequency modulation of CO
2
laser 1; this modulation is
at a rate of 1 kHz. The FIR detector and lock-in ampli-
fier detect at this modulation rate; hence the derivatives
of the absorptions are recorded.
Absorption cells from 0.5to3.5 m in length with
diameters ranging from 19 to 30 mm have been used
in the spectrometer. The cells have either glass, copper,
or Teflon walls and have polyethylene or polypropylene
Part C 41.1