Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

SECTION 7.2 ROTATIONS OF SUBSPACES 169
a x a
−1
−a
x a
−1
(x
.
a)/a
x
a
A
Figure 7.1: Line and plane reflection of a vector x in a vector a, used as line direction or as
normal vector for the plane A.
This hyperplane reflection is actually what we mean by a reflection—in 3-D, it reflects in
a plane, which is like looking into a mirror. It extends to blades by outermorphism as the
linear transformation a:
k
R
n
→
k
R
n
defined by
reflection of X in dual hyperplane a: X → a[X] ≡ a
Xa
−1
, (7.2)
where
X = (−1)
grade(X)
X is the grade involution.
To be a reflection, its determinant should be −1 in a space of any dimensionality. With
the pseudoscalar of n-dimensional space denoted as I
n
, we can check this easily using
definition (4.7) of a determinant in geometric algebra:
det(a) = (a
I
n
a
−1
) I
−1
n
= a (
I
n
a
−1
) I
−1
n
= a (−a
−1
I
n
) I
−1
n
= −1.
Here we used the fact that a is contained in the space I
n
, and therefore a ∧ I
n
= 0,so
that aI
n
= −
I
n
a. So the determinant is indeed −1. If you would repeat the determinant
computation for the line reflection, you would find (−1)
n+1
for the determinant in
n-dimensional space. This shows that in 3-D, a line reflection is actually not a reflection
but a rotation (see structural exercise 3). By contrast, hyperplane reflections are indeed
proper reflections in any dimension.
7.2 ROTATIONS OF SUBSPACES
Having reflections as a sandwiching product leads naturally to the representation of rota-
tions. For by a well-known theorem, any rotation can be represented as an even number
of reflections. In geometric algebr a, this statement can be converted immediately into a
computational form.

170 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
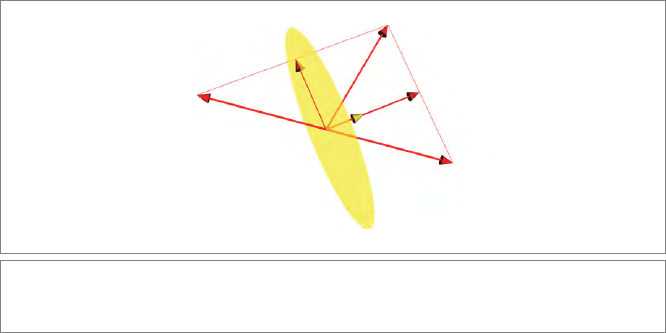
7.2.1 3-D ROTORS AS DOUBLE REFLECTORS
Two reflections make a rotation, even in R
3
(see Figure 7.2). Since an even number of
reflections absorbs any sign, we may make these reflections either both line reflections
axa
−1
or both (dual) hyperplane reflections −axa
−1
, whichever feels most natural or is
easiest to visualize. The figure uses line reflections.
As the figure shows, first reflecting in a, then in b, gives a rotation over an axis perpen-
dicular to the a ∧b-plane, over an angle that is twice the angle from a to b (and this angle
and plane also give the sense of rotation, clockwise or anticlockwise in the plane). In this
construction, only the plane and relative angle of the vectors a and b matter.
GAViewer
or the programming example in Section 7.10.2 each provide an interactive version. We
strongly recommend playing with either if you need to tune your intuition.
It is simple to convert this geometrical idea into algebra. The operation
x → b (axa
−1
) b
−1
= ba
−1
xab
−1
= (b/a) x (b/a)
−1
is the double reflection, and therefore produces the rotation in the a ∧b plane (we moved
some scalar squared norms around to get a pleasant expression). We observe that this
rotation is generated by an element R = b/a = ba
−1
, as applied to a vector by the recipe
rotation of x: x → R x R
−1
.
a
b
x
x
x
Figure 7.2: A rotation in a plane is identical to two reflections in vectors in that plane,
separated by half the rotation angle.
SECTION 7.2 ROTATIONS OF SUBSPACES 171
Note that this element R is not necessarily a blade, since it is a geometric product. That
is why we do not denote it by a bold symbol. It defines a linear transformation that we
denote by R[].
Since rotation is a linear transformation, it can be extended as an outermorphism. You
can easily show by mimicking the proof of (7.1) that a blade X rotates to R[X] defined by
rotation of X: X → R[X] ≡ R X R
−1
.
(7.3)
There are no extra signs in this transformation formula, unlike the reflection formula of
(7.2); the double reflection has canceled them all. As a consequence, the determinant of
a rotation is +1 in a space of any dimension:
det(R) = (R I
n
R
−1
)/I
n
= RR
−1
I
n
I
−1
n
= 1.
Geometrically, this means that there is no orientation change of the pseudoscalar.
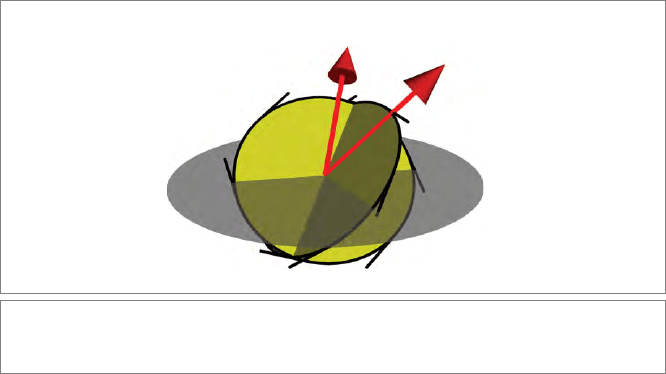
Equation (7.3) can even be extended to arbitrary multivectors, for the rotation is linear.
That means that we are now capable of rotating any multivector, not just a vector, with
the same formula. In 3-D, this is already helpful: we can rotate a plane (represented as a
2-blade) directly without having to dualize it first to a normal vector (see Figure 7.3). On
the other hand, if it had been given dually, we could rotate it in that form as well. These
capabilities extend to higher-dimensional spaces and in Part II will permit us to rotate
Euclidean circles, spheres, and other elements, all using the same operation.
It is common practice to take out the scaling factor in R = b/a, reducing it to a unit
element called a rotor. That obviously makes no difference to the application to a blade,
x
A
R x / R
R A / R
Figure 7.3: The same operation RX/R rotates a vector, a 2-blade, or any element of the
algebra.
172 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
since any scaling factor in R is canceled by the reciprocal factor in R
−1
. To compute the
normalization of a rotor, we need to compute the scalar product of a mixed-grade multi-
vector, which we have not done before. Using (6.22) and (6.23), it is straightforward:
R
2
= R ∗
R = ba
−1
a
−1
b
0
= b
2
(a
−1
)
2
0
= b
2
/a
2
.
Therefore R = ±b/a, and dividing it out produces a properly normalized rotor.
To construct a rotor to represent the rotation from a to b, we can either do what we just
did (start with general a and b and taking out the norm ratio), or just define it as the ratio
of two unit vectors b and a from the start. When we do the latter, R = ba
−1
= ba, and
R
−1
= ab=
R . It follows that the inverse of a rotor is its reverse:
R
R = 1,
so that the rotation of X can be performed as R[X] = R X
R . Performing the normal-
ization once is often better in practice than having to compute its inverse with each
application, so we will use these normalized rotors constructed from unit vectors as the
representation of rotations in this chapter.
7.2.2 ROTORS PERFORM ROTATIONS
It is natural to relate the rotor b/a to the geometrical relationships of the two vectors:
their common plane a ∧ b and their relative angle. We can use those geometric elements
to encode it algebraically, by developing the geometric product of the unit vectors in terms
of their inner and outer product, and those in terms of angle and plane. Since b and a were
assumed to be unit vectors, we have b/a = ba, and compute
R = ba= b · a + b ∧ a = cos(/2) − I sin(/2),
(7.4)
where /2 is the angle from a to b, and I is the unit 2-blade for the (a ∧ b)-plane. This
rotor involving the angle /2 actually rotates over (as Figure 7.2 suggests, and as we will
show below).
The action of a rotor may appear a bit magical at first. It is good to see in detail how the
sandwiching works to produce a rotation of a vector x in a Euclidean space. To do so, we
introduce notations for the various components of x relative to the rotation plane. What
we would hope when we apply the rotor to x is that
•
The component of x perpendicular to the rotation plane (i.e., the rejection x
↑
defined by x
↑
≡ (x ∧ I)/I ) remains unchanged;
•
The component of x w ithin the plane (i.e., the projection x
≡ (xI)/I ) gets short-
ened by cos ;
•
A component of x perpendicular to the projection in the plane (i.e., x
⊥
≡ x
I = x
I) gets added, with a scaling factor sin .
SECTION 7.2 ROTATIONS OF SUBSPACES 173
It seems a lot to ask of the simple formula R x
R , but we can derive that this is indeed
precisely what it does. The structure of the derivation is simplified when we denote c ≡
cos(/2), s ≡ sin(/2), and note beforehand that the rejection and projection satisfy the
commutation relations x
↑
I = Ix
↑
and x
I = −Ix
(these relations actually define them
fully, by the relationships of Section 6.3.1). Also, we have seen in (6.4) that in a Euclidean
space I
2
= −1, which is essential to make the whole thing work. Then
R x
R = R (x
↑
+ x
)
R
= (c − sI)(x
↑
+ x
)(c + sI)
= c
2
x
↑
− s
2
(Ix
↑
I) + cs(x
↑
I − Ix
↑
) + cs(x
I − Ix
) + c
2
x
− s
2
(Ix
I)
= (c
2
+ s
2
) x
↑
+ (c
2
− s
2
) x
+ 2cs x
I
= x
↑
+ cos x
+ sin x
⊥
,
which is the desired result. Note especially how the vector x
⊥
, which was not or iginally
present, is gener ated automatically. It is very satisfying that the whole process is driven
by the algebraic commutation rules that encode the various geometrical perp endicular-
ity and containment relationships. This shows that we truly have an algebra capable of
mimicking geometry.
The unit vectors in the directions x
↑
, x
, and x
⊥
form an orthonormal basis for the rel-
evant subspace of the vector space involved in this rotation. The rotor application has
constructed this frame automatically from the vector x that needs to be rotated. This is in
contrast to rotation matrices, which use a fixed frame for the total space that is unrelated
to the elements to be processed. Such a fixed frame then necessitates a lot of coordinate
coefficients to represent an arbit rary rotation. Even when the frame has been well chosen
(so that for instance e
1
∧ e
2
is the rotation plane), the sine and cosine of the angle occur
twice in the rotation matrix:
[[
R]] =
⎡
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
⎢
⎢
⎢
⎢
⎢
⎢
⎣
cos −sin 0 ··· 0
sin cos 0 ··· 0
001··· 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
000··· 1
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎦
.
When multiplying rotations, this double occurrence causes needless double work that
rotors avoid (like quaternions; we show the relationship in Section 7.3.5). So although it
would seem like a waste to construct a new frame for each vector, the rotation representa-
tion we have shown can actually be more efficient than a rotation matrix implementation.
After all, we never actually construct the frame; we merely perform R x
R .
There is a classical way of generating a 3-D rotation matrix that is also based on the
construction x
↑
+ cos x
+ sin x
⊥
.ItisRodrigues’ formula, which uses a unit vector a
174 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
in the direction of the rotation axis to construct x
↑
= a (a·x), x
= x−a (a·x), x
⊥
= a×x,
resulting in the rotation matrix
Rodrigues’ formula: [[ R]] = [[ a]] [[ a]]
T
+ cos ([[1]] − [[ a]] [[ a]]
T
) + sin [[ a
×
]] ,
where [[ a
×
]] is the matrix corresponding to the cross product operation. This is a
coordinate-free specification of an operator based on geometric principles. The geometric
principle may be the same as before, but note that this formula is an explicit construction
rather than an automatic consequence. Unfortunately it only works in 3-D (as the use of
the cross product betrays). Moreover, it constructs a matrix that only applies to vectors
rather than a universal rotation operation.
We emphasize that for a rotation, the bivector angle I contains all information: both the
angle and the plane in which it should be measured. From this bivector angle, one can
immediately construct the rotor performing the corresponding rotation. We will see a
straightforward method for that in Section 7.4, and may write R
I
to foreshadow this.
7.2.3 A SENSE OF ROTATION
Using the transformation formula x → R x
R ,weseethatarotorR and “minus that
rotor” (−R) give the same resulting rotation. This does not necessarily mean that the
representation of rotations by rotors is two-valued: these rotors can be distinguished when
doing relative rotations of connected objects. Such relative rotations can be achieved in
two ways: by going clockwise or counterclockwise. You may think that you cannot tell
from the result which it was, but it is useful to discriminate them in some applications (it
can prevent you from curling up the wires on your robot). Let us call this property the
sense of a rotation. It comes for free with the rotor representation.
We derive the rotation angle for the negative rotor −R
I
by rewriting it into standard
form:
−R
I
= −cos( /2) + I sin(/2)
= cos
(2π + )/2
− I sin
(2π + )/2
= R
I(2π+)
.
(7.5)
It is now obvious that R
I
and −R
I
lead to the same result on a vector since a rotation
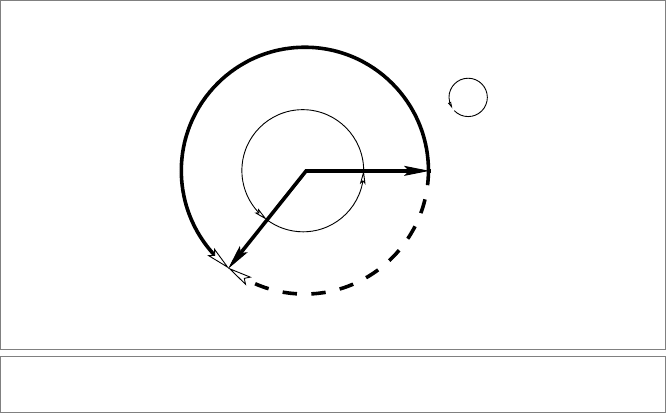
over 2π + is the same as a rotation over , see Figure 7.4. Yet the following real-life
experiment called the plate trick shows that this is actually not true for connected objects.
Hold out your hand in front of your shoulder, a hand-length away, palm upwards
and carrying a plate. Now make a motion with your arm that rotates the plate hor-
izontally in its plane over 2π. After completion, you will have your elbow sticking
up awkwardly in the air. Continue the plate rotation over another 2π (you may
have to wriggle your body a little to keep the plate turning in its plane). Perhaps
SECTION 7.2 ROTATIONS OF SUBSPACES 175
−R
Iφ
= R
−I(2π−φ)
= R
I(2π+φ)
R x R
~
I(2π−φ)
Iφ
R
Iφ
x
I
Figure 7.4: Sense of rotation.
surprisingly, both you and the plate are now back in their original position: a 4π
rotation equals the identity on coupled bodies. This is a more subtle result than the
usual statement: a 2π rotation equals the identity for isolated elements (like a plate
by itself).
The shortest way to achieve an angle of 2π + for the plate (with the same position of
the elbow) is to turn the other way over 4π −(2π + ) = 2π −. Therefore it makes sense
to say that −R
I
is a rotation over that effective angle, but in the opposite direction. That
geometrical insight is confirmed by evaluating the negated rotor by a different algebraic
route:
−R
I
= −cos(/2) + I sin(/2)
= cos((2π − )/2) + I sin((2π − )/2)
= R
−I(2π−)
.
This is indeed the rotation over the complementary angle 2π − , in the plane −I with
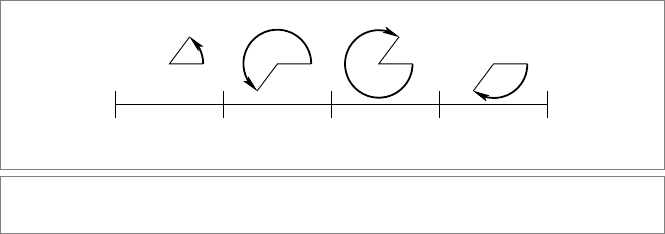
opposite orientation, see Figure 7.4. Therefore we can uniquely assign the rotor’s angles
in the range [0, 4π) to actual rotations of different magnitudes and senses, as in Figure 7.5.
Comparing this figure with the sign changes of the sine and cosine of half the rotation
angle gives a clear test for which the rotation exactly is encoded by a given rotor R.
•
The cosine cos(/2) = R
0
changes sign as |/2| exceeds π/2, so exactly when the
absolute value of the effective rotation angle exceeds π. A positive value of the
176 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
0
2π 3π 4π
π
Figure 7.5: The unique rotor-based rotations in the range = [0,4π).
scalar part of the rotor tells you that this is a rotation over the smallest angle
(whether clockwise or counterclockwise).
•
The sign of sin(/2) = R
2
I gives the sense of rotation: positive indicates a rotation
following the orientation of I, negative follows the orientation of −I.
The occurrence of I in the expression for the sense of rotation is necessary: since I defines
what orientation we mean by (counter)clockwise, the sense of rotation should also change
when we change the sign of I.
Mathematically, it is often said that the rotors constitute a double covering of the rota-
tion group—one physical rotation is being represented in two distinct ways (R and −R).
We now see how this sign actually conveys geometrically significant information about
the rotation process rather than the rotation result. Hestenes [29] calls the rotors oriented
rotations, which is a good term to have. It is the half-angle representation that enables us
to distinguish the var ious orientations.
7.3 COMPOSITION OF ROTATIONS
The composition of rotations follows automatically from their representation as a geo-
metric product:
The rotor of successive rotations, first R
1
then R
2
, is their geometric product R
2
R
1
.
This is easily shown by associativity of the geometric product, since R
2
(R
1
x
R
1
)
R
2
=
(R
2
R
1
) x (R
2
R
1
)
. That the result is indeed a rotor follows from (R
2
R
1
)(R
2
R
1
)
=
R
2
R
1
R
1
R
2
= 1.
We expand this composition in detail in this section to sharpen our intuition, both alge-
braically and geometrically, and to relate it to other rotation representations such as
complex numbers and quaternions.
SECTION 7.3 COMPOSITION OF ROTATIONS 177
7.3.1 MULTIPLE ROTATIONS IN 2-D
If we rotate in a single plane with pseudoscalar I, we are effectively dealing with rotations
in a 2-D Euclidean subspace
R
2,0
. Performing the 2-D rotation R
I
2
after R
I
1
results in
the total rotation R
I(
2
+
1
)
, as you would expect. This also shows that planar rotations
commute.
The algebraic demonst ration is straightforward:
R
I
2
R
I
1
=
=
cos(
2
/2) − I sin(
2
/2)
cos(
1
/2) − I sin(
1
/2)
=
cos(
2
/2) cos(
1
/2) − sin(
2
/2) sin(
1
/2)
−I
cos(
2
/2) sin(
1
/2) + sin(
2
/2) cos(
1
/2)
= cos((
2
+
1
)/2) − I sin((
2
+
1
)/2)
= R
I(
2
+
1
)
.
Algebraically, this looks like the standard computation using a product of complex num-
bers, since I
2
= −1. We prefer to view it as a calculation in the real geometric algebra of
coplanar elements.
In 2-D, rotations do not actually require the rotor sandwiching product R x
R to be
applied. Since any vector x in the I-plane satisfies the anticommutation relationship
xI= −Ix, we can bring a rotor to the other side:
R
I
x R
−I
=
cos(/2) − I sin(/2)
x
cos(/2) + I sin(/2)
= x
cos(/2) + I sin(/2)
cos(/2) + I sin(/2)
= x
cos + I sin
(7.6)
=
cos − I sin
x.
The two final lines show alternative forms for the one-sided planar rotation. We have
met the final form, using left multiplication, when we did the motivating problem in
Section 6.1.6.
In summary, in a plane (and in a plane only!) the half-angle rotors in the sandwiching
product can be converted to whole-angle, one-sided products using either left or right
multiplication.
7.3.2 REAL 2-D ROTORS SUBSUME COMPLEX NUMBERS
We have just shown how the rotation of a vector x in a plane I containing it can be sim-
plified from the two-sided sandwiching form to a postmultiplication:
x → x (cos + I sin ). (7.7)
Because I
2
= −1, this is reminiscent of complex numbers, a well-known tool to perform
rotations in the complex plane. Yet our approach must be subtly different, for the vector
178 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
x anticommutes with the 2-blade I (i.e., xI = −Ix), whereas if x and I had been complex
numbers they should have commuted with each other. Also, we are in a real plane, not in
a complex plane at all. What is going on here? How can such different algebras lead to the
same (or at least isomorphic) results?
The answer lies in the special role of the real axis in the complex plane. The selection of
such a special reference direction destroys the geometrical symmetries of the plane and
changes the algebra of the symbols. Let e be the unit vector in the direction of the real
axis, then a complex number X corresponding to the vector x in the plane denotes how
to rotate and scale e to get to x. In terms of geometric algebra, this is the ratio X = x/e
(see Section 6.1.6). So
a complex number is a geometr ic ratio of a vector to a fixed vector.
To be specific, the complex number corresponding to a vector a = a
1
e
1
+ a
2
e
2
in the
I ≡ e
1
∧ e
2
-plane relative to the ‘real axis’ e
1
is
A = a/e
1
= a
1
− a
2
I. (7.8)
The original vector addition can of course be lifted to these complex numbers by linearity
of the geometric product:
A + B = (a/e
1
+ b/e
1
) = (a + b)/e
1
= (a
1
+ b
1
) − (a
2
+ b
2
) I.
Two such complex numbers multiply according to the geometric product:
AB= (a
1
− a
2
I)(b
1
− b
2
I) = (a
1
b
1
− a
2
b
2
) − (a
1
b
2
+ a
2
b
1
) I.
This product is obviously commutative. With sum and product thus defined, our complex
numbers are clearly isomorphic to the usual complex numbers and their multiplication,
if you set i ≡−I.
Yet we will not use complex numbers to do geometry in the plane, for they lose the dis-
tinction between vectors and operators; the vectors have effectively become represented as
rotation/scaling operators. The capability to describe such operators compactly was part
of the attr action of complex numbers when they were first introduced. But we really want
both vectors and operators in our geometry, so we want all elements that can be made in
the basis:
{1, e
1
, e
2
, e
1
∧ e
2
= I}.
That is precisely what the geometric algebra of the plane provides, in an integrated manner
that also contains the algebraic and geometrical relationships between vectors and oper-
ators. Complex numbers only use the basis {1,I}. They are only half of what is required
to do all of Euclidean planar geometry.
To show the power of this way of looking at complex numbers, programming
exercise 7.10.5 computes the fractal Julia sets using only real vectors. That formulation
makes their extension to n-dimensional space straightforward.