Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

SECTION 7.7 THE PRODUCT STRUCTURE OF GEOMETRIC ALGEBRA 199
through the versor product to again provide drawable elements. There is therefore never
a doubt about the geometrical nature of any of the multiplicatively constructed elements.
A similar contrast exists between Grassmann algebra, which permits arbit rary addition,
and what we called subspace algebra in our early chapters, permitting only the multiplica-
tive constructions. Unfortunately, mathematics has developed the additive Grassmann
and Clifford algebras to a much greater extent than their multiplicative parts. Much of
that work is irrelevant to their geometrical usage. It may even be incomplete, for what
would have been good and useful geometrical theorems may not be stated because they
are not generally valid when addition is allowed, and therefore are considered less pure.
When consulting the mathematical literature, be on the lookout for results on “simple”
multivectors, which require factorizability by the outer product (and are therefore about
blades) or the geometric product (and are thus about versors).
The sole exception we have been forced to make so far to our multiplicative principle
involves exponentiation. When one multiplies two rotors, a rotor results. Starting from
rotors that can be represented as the exponentials of 2-blades, we can construct the
exponentials of general bivectors as geometrically significant operators. Permitting their
logarithm as an operation in our algebra, we should therefore permit general addition of
bivectors as a constructive operation—but the resulting elements may then subsequently
only be used for exponentiation. As such, this is still our multiplicative principle, merely
expressed in logarithmic for m.
In the grade approach to geometric algebra, the multiplicative principle is much less
easily formulated. The direct translation from the subspace product motivation would
permit us only to use the grade parts that define those products; that is the limited set
exposed in Section 6.3.2. Beyond that, there may be more geometrically relevant gr ades
(such the minimum and maximum grade of a geometric product that we will meet in
Section 21.7), but the general issue of admissible grades in the multiplicative principle
has not yet been thoroughly explored.
The mult iplicative principle is beginning to be acknowledged by mathematicians.
It will be interesting to see whether this will unearth hitherto dormant results in Clifford
algebra with patently geometrical applications. For now, we have made the multiplicative
principle the basis of our implementation (and it is part of the reason why it is among
the fastest known). We have not yet encountered geometrical situations that we cannot
represent and process.
7.7.3 BUT—IS IT EFFICIENT?
The use of blades as elements of computation and of rotors as operators to perform
orthogonal transformations on them permits us to encode a lot of geometry in a compact,
coordinate-free, and universal manner. As a consequence, we need to distinguish fewer
data types in geometric constructions. That in turn simplifies the flow of algorithms.
The resulting code looks a lot more compact and readable, since all operators can be
200 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
encoded in terms of geometrical elements of the application, rather than in unrelated
coordinate systems. But is that code also more efficient?
This question is not easily answered. There are many facets to the issue because there
are many different kinds of operations in a geometry, and the balance may differ per
application. When we do a practical comparison for a ray tracer in Part III (see Table 22.1),
the fastest implementation of geometric algebra is 25 percent slower than an optimized,
explicitly written-out classical implementation. That cost of geometric algebr a is about
the same as the performance that can be achieved by the currently commonly used
homogeneous coordinates and quaternions (which provide much less universality than
geometricalgebra).Webelievea5to10percentoverheadfortheuseofgeometric
algebra should be achievable in such applications. This would be an acceptable price
to pay for the much cleaner structure of the code, with a much reduced number of
data types and an elimination of the corresponding special operations that need to be
explicitly defined on them.
Let us briefly discuss some of the relevant issues in making an efficient implementation
of geometric algebra, with special emphasis on the orthogonal transformation of blades,
which will be the structural backbone of geometric modeling in Part II.
•
For the composition of orthogonal transformations, rotors are superior in up to
10 dimensions. The geometric algebra of an n-dimensional space has a general
basis of 2
n
elements. Rotors, which are only even-dimensional, in principle require
2
n−1
parameters for their specification (though typical rotors use only a part of this).
Linear transformations specified by matrices need n × n matrices with n
2
parameters (and typically need them all). Rotors are therefore more efficient for
storage of transformations in less than 7 dimensions (and for the practical dimen-
sionalities of 3, 4, 5 about twice as efficient). Composing transformations as rotors
takes 2
n
operations, and composing them as matrices requires n
3
operations. There-
fore in fewer than 10 dimensions, rotors are more efficient than matrices (in the
practical dimensions 3, 4, 5 about four times more). The reason for this gain by
rotors in composition is partly that they do not represent general linear transfor-
mations, just the orthogonal transformations, and that they can really exploit that
algebraic limitation, whereas matrices cannot. Unit quaternions are rotors in 3-D,
and of course well known to be efficient for the composition of rotations.
•
For the linear transformation of vectors, matrices are always supe rior. To perform
an n×n matrixonann-dimensional vector (orthogonal or not) takes n
2
operations.
A general rotor could require as much as 2
n−1
× n × 2
n−1
= n 2
2(n−1)
in a straight-
forward implementation of its two-sided product. This is always more, in the
practical dimensions about four times more. Part of the computations can be
saved by realizing that grade-preservation of the rotor operation must mean that
some terms cancel (so that they do not need to be computed). Other techniques
may reduce the computation further, but not enough to make the direct rotor
approach competitive. The conversion of a rotor to a matrix may therefore be
SECTION 7.8 FURTHER READING 201
an advantageous way to apply it to a vector. This is what one typically does for
the unit quaternions, which are 3-D rotors; we treat their conversion matrix in
Sections 7.10.3 and 7.10.4.
•
For the linear transformation of general blades, outermorphism matrices beat
vector matrices and rotors. A general k-blade is specifiable on a
n
k
-dimensional
basis.Whenwewantto transforma k-blade byan orthogonaltransformation,wehave
three possibilities: rotors, outermorphism matrices (see Section 4.5), or matrices on
the constituentvectorsfollowed by recomposition.These take,respectively,
n
k
2
n
/2
operations (using grade preser vation-based reduction),
n
k
2
operations, and kn
2
+
k
n
k
operations (the final term is an estimate of the complexity of the outer product
construction). Of those three, the outermorphism matrix is cheapest (even for k = 1,
when it reverts to the vector matrix of the previous item). Thus the generalized linear
algebra that geometric algebra offers pays off in a different form.
•
For optimal orthogonal transformation, use rotors in a code generator. Although
outermorphism matrices are relatively cheap to use on k-blades, they are not the
optimum. They do not employ all the structure of the computation, for they use
neither the fact that the element to be transformed is a k-versor or a k-blade (rather
than a general k-vector), nor can they use our knowledge that the transformation
is or thogonal. Therefore they can still be improved by explicitly spelling out the
products involved for each specific type of multivector. If you can predict the
grade of the elements beforehand, such grade-based accelerations can be built in
at compile time. But even at run time it may be worth testing the multivector type
of an element and jumping to some specialized part of the code. This engenders
no overhead at all if you can predict and specify the multivector ty pe for each
variable in your code. In this approach, the rotor multiplication formula is crucial,
since it can be used by the symbolic code generator to derive all required formulas
in a unified manner.
The bottom line is: geometric algebra works, the structural simplicity it brings can be
used directly in high-level programming, and the computational overhead can be kept
low (in the order of 5-10 percent). But the actual low implementational level on which
the computations take place needs to be carefully designed, for a literal implementation
of the geometric algebra products can rapidly become too expensive. We devote Part
III of this book completely to these implementational issues.
7.8 FURTHER READING
In this chapter, most of the literature on the foundations of geometric algebra has
become accessible, and you might even read some of the mathematical literature on
Clifford algebra.
The obviously geometrically relevant literature on rotors (and spinors) has been absorbed
into geomet ric algebra so you can read about it in the language of this book. The basic
202 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
sources are [33] and [15], who also relate it to Lie groups in much more detail than we
do in this book. Other references about the actual use of rotors in geometric applications
will be supplied with the appropriate chapters in Part II.
For an entry to the more mathematical literature, we can recommend Clifford Algebras
and Spinors [41]. Together with [52] and [51], it gives the precise mathematics. Thoug h
all are short on actual geometry, they can be used to answer questions about the validity
of perceived patterns that one may be tempted to use in implementations.
7.9 EXERCISES
7.9.1 DRILLS
1. Compute R
1
≡ R
e
1
∧e
2
π /2
and apply to e
1
.
2. Compute R
2
≡ exp(e
3
∧ e
1
π/4) and apply to e
2
∧ e
4
.
3. Compute R
2
R
1
and apply to e
1
∧ e
2
.
4. Compute the axis and angle of R
2
R
1
.
5. Compute the product of the rotors R
e
14
π /2
and R
e
23
π /2
and apply to e
12
.
6. Reflect ( e
1
+ e
2
) ∧ e
3
in the plane e
1
∧ e
4
.
7. Reflect the dual plane reflector e
1
in the plane e
1
∧ e
3
.
7.9.2 STRUCTURAL EXERCISES
1. The generalization of the line reflection from axa
−1
to aXa
−1
seems straightfor-
ward when we remember that a k-blade can be written as the geometric product
of k mutually orthogonal vectors: X = x
1
x
2
···x
k
, and then simply compute
the outermorphism as (ax
1
a
−1
)(ax
2
a
−1
) ···(ax
k
a
−1
) = aXa
−1
. The result is
correct but the proof is wrong as it stands. Why? (Hint: Can you guarantee the
factorization after reflection?)
2. We have seen that for a Euclidean unit 2-blade, I
2
= −1. Interpret this geomet-
rically in terms of versors.
3. Verify that a line reflection in 3-D can be performed as a rotation. Which rotation?
Give the axis and angle. Verify that this reflection can be applied to any blade.
4. Show that the fact that the geometr ic product transforms naturally under applica-
tion of a versor, together with linearity, implies that the contraction is preserved.
(Hint: An intermediate step uses linearity to show that the outer product is
preserved.)
5. Show from the definition of the adjoint (in Section 4.3.2) that the adjoint of a
transformation that can be written as a versor product with a versor V is a versor
product with the versor V
−1
. Relate this to the orthogonality of a versor-based
transformation.
SECTION 7.9 EXERCISES 203
6. We can reflect mirrors into mirrors to compute the effective mirror of a total
reflection. Why can you ignore all signs in that computation and therefore
universally use M
2
M
1
M
2
for the reflection of mirror 1 in mirror 2 regardless of
whether they have been represented directly or dually?
7. Match the computation of the composition of 2-D rotations in Section 7.3.1 to
that of the 3-D rotations in Section 7.3.3, both algebraically and in the geometric
visualization.
8. To study the spherical image of rotation composition, take a rotation in the e
1
e
3
plane over π/2, followed by a rotation in the e
3
e
2
plane over π/2.Asrotors,
these are (1 − e
1
e
3
)/
√
2 and (1 − e
3
e
2
)/
√
2. Draw two great circles, w ith poses
corresponding to the rotation planes e
1
e
3
and e
3
e
2
. On these great circles, the
rotations over π/2 are represented as oriented arcs of length π/4 (the corresponding
rotor angle). These arcs are freely movable along their great circles. To compose
the rotations, make them meet so that you can perform R
1
and then R
2
. This is a
depiction as in Figure 7.6. The arc completing the spherical triangle is in a skew
plane with a length that looks like it might be π/3. Do an actual computation to
confirm this value for the rotor angle and a plane of (−e
3
e
2
− e
1
e
3
+ e
2
e
1
)/
√
3.
The resulting rotation is over −2π/3 in this plane. Rewrite this using (7.10), and
show that the rotation axis is (−e
1
− e
2
+ e
3
).
9. Draw the rotated rotor R
2
R
1
R
2
as an arc in the spherical image. (Hint: What
would you expect it to be based on its geometric meaning? Warning: It is not
simply the R
1
arc rotated over the R
2
-arc!)
10. Establish the precise correspondence between the quantities in the rotor com-
position (7.9) and the quaternion product of (7.11). (Warning: This is a painful
exercise in keeping things straight, and not very rewarding.)
11. Derive the formulas for the reflection of a dual blade Y = X
∗
from the formulas
for reflection of a directly represented blade X. Derive the last column of Table 7.1
from the column before. Make sure you take the dual of both input and output
relative to the same unreflected pseudoscalar I
n
.
12. A special case of reflection is when A is the scalar 1. Derive the algebraic outcome
and interpret geometrically. Another special case is A = I
n
; compute that and
interpret. Why is the latter outcome not the dual of the former?
13. You can project onto a rotor and get a geometrically meaningful result. Give
the geometr ic interpretation of the projection P
R
[x] ≡ (xR) R
−1
. (Hint: Think
“chord.”) For rotors, it matters whether you put the inverse on the first or the
last factor: what is (xR
−1
) R?
14. In
R
4,0
with the usual basis, perform a rotation in the e
1
∧ e
2
plane followed by
a rotation in the e
3
∧e
4
plane. Compute the rotor of the composition, and show
that this is the exponent of a bivector, not of a 2-blade. (Hint: See structural
exercise 5 of Chapter 2.) Note also that the rotor is not of the simple form “scalar
plus 2-blade” of Section 7.4 (or even “scalar plus bivector”).
204 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
7.10 PROGRAMMING EXAMPLES AND EXERCISES
7.10.1 REFLECTING IN VECTORS
The code of the first example is a straightforward implementation of the line reflection
equation:
e3ga::vector reflectVector(const e3ga::vector &a,
const e3ga::vector &x) {
return _vector(a*x*inverse(a));
}
The program allows you to interactively manipulate both a (red) and x (green). You
can use the popup menu to switch to a mode that shows you that this also works for
bivectors.
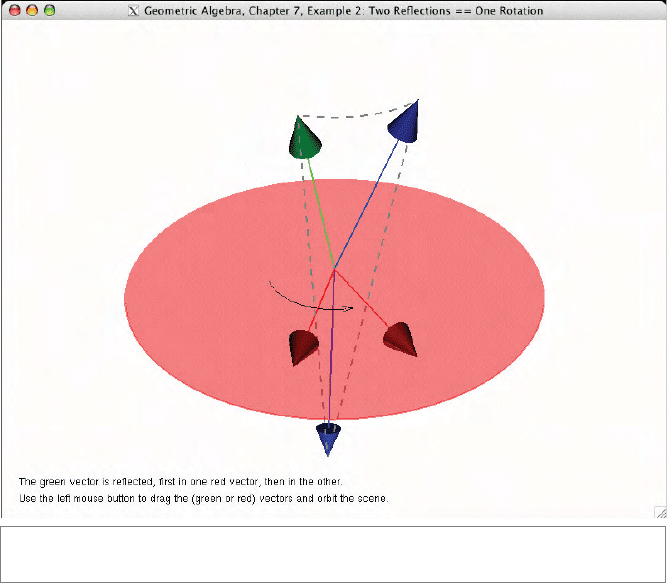
7.10.2 TWO REFLECTIONS EQUAL ONE ROTATION
This example displays an interactive version of Figure 7.2. The input vector (green)
is successively reflected in two different (red) vectors. The end result is that the input
vector is rotated, as expected. To reflect the input vector we invoke
reflectVector()
twice:
// update the reflected/ rotated vectors
g_reflectedVector = reflectVector(g_reflectionVector1,
g_inputVector);
g_rotatedVector = reflectVector(g_reflectionVector2,
g_reflectedVector);
Figure 7.9 shows a screenshot.
7.10.3 MATRIX-ROTOR CONVERSION 1
To connect to programs and libraries not based on geometric algebra (such as OpenGL),
you may need to convert back and forth between rotors and matrices. This example
provides the code for the 3-D case. The algorithms are based on geometric intuition—see
the next exercise for more efficient solutions.
Rotor To Matrix Conversion
The columns of a (rotation) matrix are the images of the basis vectors under the
transformation. To convert from rotor to matrix, we transform e
1
, e
2
, and e
3
and copy
them into the matrix. The implementation is straightforward:
void rotorToMatrix(const rotor &R, float M[9]) {
// compute images of the basis vectors:
rotor Ri = _rotor(inverse(R));
e3ga::vector image[3] = {
_vector(R * e1 * Ri),
// image of e1
_vector(R * e2 * Ri), // image of e2
SECTION 7.10 PROGRAMMING EXAMPLES AND EXERCISES 205
Figure 7.9: Interactive version of Figure 7.2.
_vector(R * e3 * Ri) // image of e3
};
// copy coordinates to matrix:
for (int i=0;i<3;i++)
for (int j=0;j<3;j++)
M[j*3+i]=image[i].getC(vector_e1_e2_e3)[j];
}
Rotation Matrix To Rotor Conversion
Conversion from matrix to rotor is more complicated. Again we start with the fact
that the columns of the matrix are the images of the basis vectors. We should remember
that rotors are ambiguous: we can always increase the angle by 4π to get another rotor
that is equivalent. And since a rotation matrix does not specify the sense of rotation,
R and −R are both acceptable solutions. We compute the smallest rotor (i.e., with the
smallest angle) as our solution in three steps:

206 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
•
First, compute the smallest rotor R
1
that rotates e
1
to the image of e
1
under the
matrix transform.
•
Then, compute the smallest rotor R
2
that rotates R
1
e
2
/R
1
to its image of e
2
under
the matrix transform. Because of orthogonality, this rotor will leave R
1
e
1
/R
1
unchanged.
•
Finally, compute the full rotor: R = R
2
R
1
.
Because of orthogonality, e
3
automatically transforms correctly to R e
3
/R. The code for
this algorithm:
// note: very imprecise in some situations; do NOT use this
// function in practice
rotor matrixToRotor(const float M[9]) {
e3ga::vector imageOfE1(vector_e1_e2_e3,
M[0*3+0],M[1*3+0],M[2*3+0]);
e3ga::vector imageOfE2(vector_e1_e2_e3,
M[0*3+1],M[1*3+1],M[2*3+1]);
rotor R1 = rotorFromVectorToVector(_vector(e1), imageOfE1);
rotor R2 = rotorFromVectorToVector(_vector(R1 * e2 * inverse(R1)),
imageOfE2);
return _rotor(R2 * R1);
}
There is a compact formula that computes the smallest rotor that rotates a unit vector
a to another unit vector b,in3-D.Itis
R =
1 + ba
2(1+ b · a)
.
(7.23)
(We discuss it in more context in Section 10.3.2, but we use it now.) It is implemented
in the function
rotorFromVectorToVector(). The rotor formula is unstable when
a · b −1, which happens near a rotation over 180 degrees (the rotation plane is then
not accurately determined, neither geometrically nor algebraically). This also makes the
code listed above unstable. We work around this limitation in two ways in the stable
version of the function, shown in Figure 7.10. This first is to pick the first basis vector
such that a 180-degree rotation is not required. This is tested using
if(M[0*3+0]>
— 0.9f) {/*...*/}
. The second is to provide a default rotation plane (2-blade) to be
used by
rotorFromVectorToVector()—this plane must be orthogonal to the image
of the first basis vector.
rotorFromVectorToVector() uses this plane in situations
where the rotation is near 180 degrees to come up with a solution for this geometrically
degenerate case.
7.10.4 EXERCISE: MATRIX-ROTOR CONVERSION 2
The conversion functions we presented above are (geometrically) intuitive, but they are
not the most efficient solutions. A much better way is to perform the rotation on the
SECTION 7.10 PROGRAMMING EXAMPLES AND EXERCISES 207
rotor matrixToRotorStable(const float M[9]) {
e3ga::vector imageOfE1(vector_e1_e2_e3,
M[0*3+0],M[1*3+0],M[2*3+0]);
e3ga::vector imageOfE2(vector_e1_e2_e3,
M[0*3+1],M[1*3+1],M[2*3+1]);
e3ga::vector imageOfE3(vector_e1_e2_e3,
M[0*3+2],M[1*3+2],M[2*3+2]);
if (M[0*3+0]> — 0.9f)
{
rotor R1 = rotorFromVectorToVector(_vector(e1), imageOfE1);
rotor R2 = rotorFromVectorToVector(_vector(R1 * e2 * inverse(R1)),
imageOfE2,_bivector(dual(imageOfE1)));
return _rotor(unit_e(R2 * R1));
}
else if (M[1*3+1]> — 0.9f)
{
rotor R1 = rotorFromVectorToVector(_vector(e2), imageOfE2);
rotor R2 = rotorFromVectorToVector(_vector(R1 * e3 * inverse(R1)),
imageOfE3,_bivector(dual(imageOfE2)));
return _rotor(unit_e(R2 * R1));
}
else
{
rotor R1 = rotorFromVectorToVector(_vector(e3), imageOfE3);
rotor R2 = rotorFromVectorToVector(_vector(R1 * e1 * inverse(R1)),
imageOfE1,_bivector(dual(imageOfE3)));
return _rotor(unit_e(R2 * R1));
}
}
Figure 7.10: Rotation matrix to rotor conversion.
unit basis vectors symbolically and encode the results. This is straightforward. On an
orthonormal basis {e
i
}, with associated bivector basis e
ij
≡ e
i
∧ e
j
,lettherotortobe
converted be
R = w + x e
23
+ y e
31
+ z e
12
.
The normalization of the rotor implies that w
2
+ x
2
+ y
2
+ z
2
= 1. Then one computes
R e
1
R = (w + x e
23
+ y e
31
+ z e
12
) e
1
(w − x e
23
− y e
31
− z e
12
)
= (w
2
+ x
2
− y
2
− z
2
) e
1
+ 2(−wz + xy) e
2
+ 2(wy + xz) e
3
=
1 − 2(y
2
+ z
2
)
e
1
+ 2(−wz + xy) e
2
+ 2(wy + xz) e
3
.
208 ORTHOGONAL TRANSFORMATIONS AS VERSORS CHAPTER 7
The transformation of the other basis vectors is obtained by cyclicity (resubstituting
the indices 1 → 2 → 3 → 1 and values x → y → z → x). The result is the matrix that
implements the linear transformation of applying the rotor R toavector:
[[ R]] =
⎡
⎢
⎣
⎡
⎢
⎣
1 − 2y
2
− 2z
2
2yx + 2wz 2zx − 2wy
2xy − 2wz 1 − 2z
2
− 2x
2
2zy + 2wx
2xz + 2wy 2yz − 2wx 1 − 2x
2
− 2y
2
⎤
⎥
⎦
⎤
⎥
⎦
This basically is also how one converts a quaternion into a matrix. If you already have
software for that, you can use it, though you may need to to initialize a rotor from its
(quaternion) coordinates, which i s the implementation of the correspondence of (7.10):
float w, x, y, z;
rotor R(rotor_scalar_e1e2_e2e3_e3e1, w, — z, — x, — y);
Here w, x, y, and z are the coordinates of a classic quaternion (which are not always
defined in the same way, so beware what correspondence between the quaternion units
i, j, k, and the basis bivectors should be used!).
Implement this rotor to matrix conversion and test its speed when applied to vectors.
The example code provides the basic framework for testing and timing. In our solution,
this classic version was about four times faster than the geometric version.
The converse function, to convert a rotation matrix into a rotor, can also be sped up.
Here we can use the standard conversion of a matrix to a unit quaternion. Consider
the form of the matrix above and use combinations of the elements to retrieve the
four parameters. Addition of selected off-diagonal elements gives products of two of
the parameters; the diagonal elements can be added with appropriate signs to give the
square of only one variable, which is enough to compute the rest. Any trusted site on
quaternion computations gives the details.
7.10.5 JULIA FRACTALS
Fractals are usually introduced using complex numbers. But with the subsumption of
complex numbers into geometric algebra, as explained in Section 7.3.2, they are just
as easily generated using vectors in a real geometric algebra. This has the additional
advantage that they can be extended to more than two dimensions without changing
the algorithm. We explore this for Julia fractals, based on [37].
In the classic computation of 2-D fractal images, the image space is considered to be
a complex plane. Each pixel (indicated by its complex coordinates) is inside the fractal
set if, under repeated application of some mathematical function, the result does not
tend to infinity.
For the Julia set, the complex function is an iterative computation, computing the
complex number X
k+1
as the p
th
power of the previous number and some additive
constant complex number C: