Дипломный прект - Исследование динамических процессов многоканатной скиповой подъёмной установки, работающей в условиях рудника Верхнекамского калийного месторождения
Подождите немного. Документ загружается.


д) Демпфирование колебаний при помощи системы автоматического регулирования тормоза.
Рассмотрим подробнее способы в) и д).
6.4.1 Уменьшение динамических нагрузок за счёт приложения тормозного усилия
двумя равными ступенями (7,стр.85-86).
Предположим, что при приложении тормозного усилия ступенью органу навивки придано
замедление a=Ft+Fct/(mx+my+mz) .На первой ступени торможения прикладывается усилие Ft, при котором
средняя величина замедления равна а.Через полпериода прикладывается такое Ft', при котором средняя
величина замедления 2а и наблюдается практически апериодический переходный процесс. Далее,при
скорости машины, равной v=0.5Ta, опять прикладывается усилие Ft, замедление начнет уменьшаться и через
время, равное полпериоду колебаний, достигнет нулевого значения. При этом колебания после остановки
машины будут значительно снижены.
Тормозная характеристика, воплощающая описанный способ, выражается зависимостью
F
т
t'( ) if t' 4.43≥
M
т3
R
н
2⋅
9.81⋅, if t'
T
2
≤
M
т3
R
н
2⋅
9.81⋅,
M
т3
R
н
9.81⋅,
,
:=
;
Промоделируем процесс предохранительного торможения при спуске расчётного груза при
этом способе уменьшения динамических нагрузок
-Матрица начальных скоростей и перемещений
v
0
v
m
0
v
m
0
v
m
:=
41
.

D t' v,( )
v
2
if v
2
0≤ 0,
0.15
π
E F⋅
h
y
v
3
−
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
⋅
⋅ v
4
v
2
−
( )
⋅
0.15
π
E F⋅
h
z
v
3
+
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H h
z
− v
3
−
( )
⋅+
⋅
⋅ v
6
v
2
−
( )
⋅
+
...
E F⋅
h
y
v
3
−
v
3
v
1
−
( )
⋅
E F⋅
h
z
v
3
+
v
5
v
1
−
( )
⋅+
F
т
t'( )−+
...
m
x
,
v
4
0.15
π
E F⋅
h
y
v
3
−
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
⋅
⋅
v
2
v
4
−
( )
⋅
E F⋅
h
y
v
3
−
v
1
v
3
−
( )
⋅ P
y
−+
...
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
v
6
0.15
π
E F⋅
h
z
v
3
+
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H h
z
− v
3
−
( )
⋅+
⋅
⋅ v
2
v
6
−
( )
⋅
E F⋅
h
z
v
3
+
v
1
v
5
−
( )
⋅ P
z
−+
...
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H h
z
− v
3
−
( )
⋅+
:=
Z rkfixed v 0, 15, 1000, D,( ):=
j 0 1000..:=
Получим решение системы в виде графика ускорения.
y' Z( ) Z
j 1+( ) 5,
:=
j
- скорость гружёного сосуда ;
z' Z( ) Z
j 1+( ) 7,
:=
j
- скорость порожнего сосуда ;
x' Z( ) Z
j 1+( ) 3,
:=
j
- скорость машины ;
t' Z( ) Z
j 1+( ) 1,
:=
j
- время.
42
y'' j( )
0.15
π
E F⋅
h
y
Z
j 1+( ) 4,
−
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+
m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
...
⋅⋅
Z
j 1+( ) 3,
Z
j 1+( ) 5,
−
⋅
E F⋅
h
y
Z
j 1+( ) 4,
−
Z
j 1+( ) 2,
Z
j 1+( ) 4,
−
⋅ P
y
−+
...
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+ m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
:=
z'' j( )
0.15
π
E F⋅
h
z
Z
j 1+( ) 4,
+
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+
m'
k
H h
z
− Z
j 1+( ) 4,
−
⋅+
...
⋅⋅ Z
j 1+( ) 3,
Z
j 1+( ) 7,
−
⋅
E F⋅
h
z
Z
j 1+( ) 4,
+
Z
j 1+( ) 2,
Z
j 1+( ) 6,
−
⋅ P
z
−+
...
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+ m'
k
H h
z
− Z
j 1+( ) 4,
−
⋅+
:=
x'' j( ) if Z
j 1+( ) 3,
0≤ 0,
0.15
π
E F⋅
h
y
Z
j 1+( ) 4,
−
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+
m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
...
⋅
⋅ Z
j 1+( ) 5,
Z
j 1+( ) 3,
−
⋅
0.15
π
E F⋅
h
z
Z
j 1+( ) 4,
+
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+
m'
k
H h
z
− Z
j 1+( ) 4,
−
⋅+
...
⋅
⋅ Z
j 1+( ) 7,
Z
j 1+( ) 3,
−
⋅
+
...
E F⋅
h
y
Z
j 1+( ) 4,
−
Z
j 1+( ) 4,
Z
j 1+( ) 2,
−
⋅
E F⋅
h
z
Z
j 1+( ) 4,
+
Z
j 1+( ) 6,
Z
j 1+( ) 2,
−
⋅+
+
...
F
т
t' j( )( )−
( )
+
...
m
x
,
:=
0 1 2 3 4 5 6 7
10
0
10
Время, сек
Ускорение, м/сек^2
a
п.доп
−
x'' j( )
y'' j( )
x' j( )
F
т
t' j( )( )
m
x
Z
j 1+( ) 1,
Рис.11
43
Построим диаграммы нагрузок ( полных натяжений ) в канатах и сравним с результатами, полученными при
моделировании предохранительного торможения с реальной тормозной характеристикой
S''
гр
j( ) m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+ m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
9.81⋅ y'' j( ) m
cy
⋅+ P
y
9.81⋅−:=
S''
пор
j( ) m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+ m'
k
H h
z
− Z
j 1+( ) 4,
−
⋅+
9.81⋅ z'' j( ) m
cz
⋅− P
z
9.81⋅+:=
0 1 2 3 4 5 6 7 8
2
.
10
5
4
.
10
5
6
.
10
5
8
.
10
5
Время, сек
Натяжения, Н
S''
гр
j( )
S''
пор
j( )
Z
j 1+( ) 1,
Рис.12
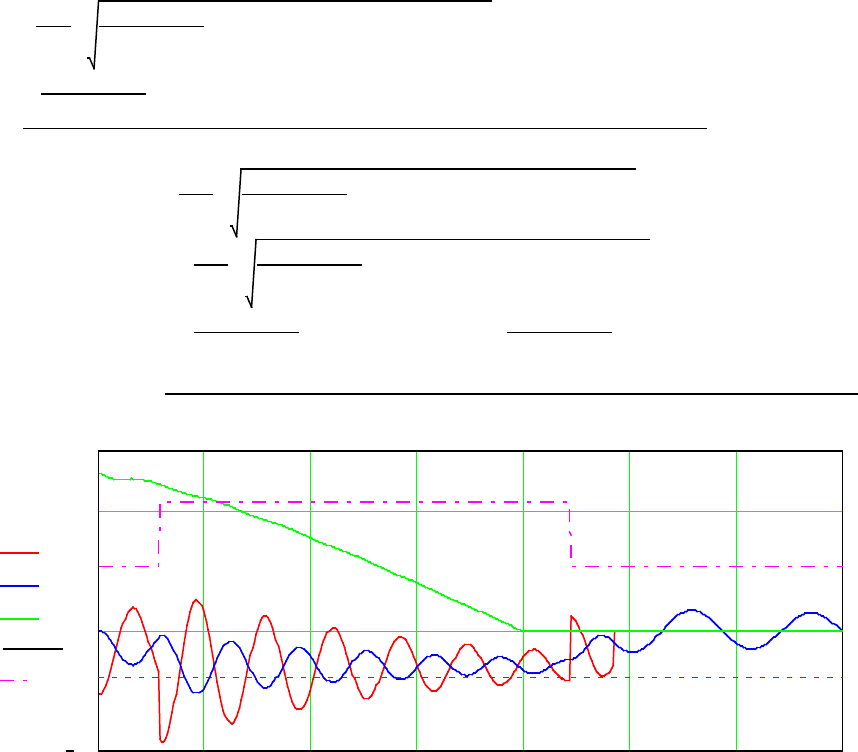
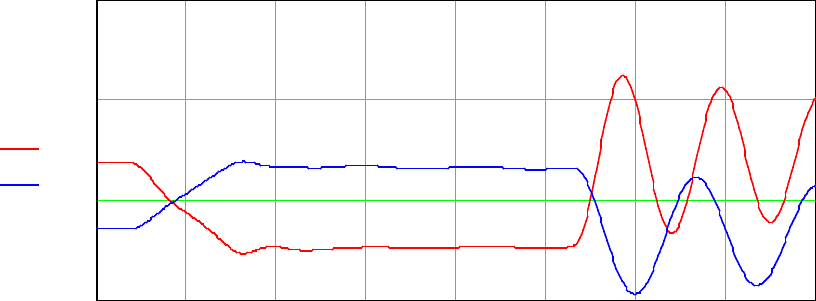
Сравнивая графики замедлений процессов предохранительног торможения с реальной
тормозной характеристикой и приложением тормозного воздействия двумя равными ступенями отмечаем,
что во втором случае увеличилось время торможения на 0,8 сек. В тоже время амплитуда замедления во
время торможения значительно меньше, и не превышает максимально допустимой по условию
непроскальзывания величины а
п.доп.
, как в первом случае.
После 3,5 секунд торможения можно наблюдать
практически апериодический переходный процесс. После стопорения машины полностью
отсутствуют колебания ( а значит и динамические нагрузки ) гружёной ветви, в то время как в первом
случае амплитуда колебаний гружёной ветви достигает значения 4,8 м/сек^2.
Сравнивая графики нагрузок в канатах, отмечаем во втором случае снижение нагрузок в
гружёной ветви во время торможения на 50 кН. После стопорения в первом случае наблюдаются
значительные периодические нагрузки с максимальной амплитудой 920 кН. Во втором случае
динамическая составляющая нагрузки практически полностью отсутствует.
Таким образом можно сделать вывод о действительном эффекте снижения динамических
нагрузок при приложении тормозного усилия двумя равными ступенями.
6.4.2 Демпфирование колебаний при помощи автоматической системы регулирования
тормоза (7,стр.88-93).
Идея способа, предложенная профессором А. Г. Степановым, ввести в тормозное усилие,
формирующееся по заданному закону, составляющую, пропорциональную разности скоростей машины и
груженого сосуда Fk=Ky(x'-y'). Здесь Ky-коэффициент усиления.
44
Эта мера позволит синтезировать тормозное усилие, которое практически
полностью задемпфирует колебания в подъёмной системе, ведущие к нежелательным динамическим
нагрузкам. В качестве основного тормозного усилия используем усилие с линейной характеристикой,
изменяющееся за время, кратное периоду колебаний. В графической проекта приведена принципиальная
схема устройства управления тормозом, позволяющая реализовать демпфирование колебаний.
Введём необходимое обозначение
G
M
т3
R
н
9.81⋅:=
Задание тормозного усилия

F
т
t'( ) 0 0 t'≤ 0.3≤if
G
T
t' 0.3−( )⋅ 0.3 t'< T .3+≤if
G
T
2 T⋅ 4.07+ t'−( )⋅ T 4.07+ t'< 2 T⋅ 4.07+≤if
0 t' 2 T⋅ 4.07+>if
G otherwise
:=
Матрица начальных скоростей и
перемещений
ORIGIN 1≡
k
y
5 m
x
⋅:=
- коэффициент усиления .
v
0
v
m
0
v
m
0
v
m
:=
.
.
.
.
.
.
.
45
.
D t' v,( )
v
2
if v
2
0≤ 0,
0.15
π
E F⋅
h
y
v
3
−
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
⋅
⋅ v
4
v
2
−
( )
⋅
0.15
π
E F⋅
h
z
v
3
+
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H v
3
− h
z
−
( )
⋅+
⋅
⋅ v
6
v
2
−
( )
⋅
+
...
E F⋅
h
y
v
3
−
v
3
v
1
−
( )
⋅
E F⋅
h
z
v
3
+
v
5
v
1
−
( )
⋅+
F
т
t'( )− k
y
v
2
v
4
−
( )
⋅−+
...
m
x
,
v
4
0.15
π
E F⋅
h
y
v
3
−
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
⋅
⋅
v
2
v
4
−
( )
⋅
E F⋅
h
y
v
3
−
v
1
v
3
−
( )
⋅ P
y
−+
...
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
v
6
0.15
π
E F⋅
h
z
v
3
+
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H v
3
− h
z
−
( )
⋅+
⋅
⋅ v
2
v
6
−
( )
⋅
E F⋅
h
z
v
3
+
v
1
v
5
−
( )
⋅ P
z
−+
...
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H v
3
− h
z
−
( )
⋅+
:=
Z rkfixed v 0, 15, 1000, D,( ):=
j 0 1000..:=
Получим решение системы в виде графика ускорения.
y' j( ) Z
j 1+( ) 5,
:=
- скорость гружёного сосуда ;
z' j( ) Z
j 1+( ) 7,
:=
- скорость порожнего сосуда ;
x' j( ) Z
j 1+( ) 3,
:=
- скорость машины ;
t' j( ) Z
j 1+( ) 1,
:=
- время;
F
v
j( ) F
т
t' j( )( ) k
y
Z
j 1+( ) 3,
Z
j 1+( ) 5,
−
⋅+:=
- тормозное усилие.
46
y'' j( )
0.15
π
E F⋅
h
y
Z
j 1+( ) 4,
−
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+
m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
...
⋅⋅
Z
j 1+( ) 3,
Z
j 1+( ) 5,
−
⋅
E F⋅
h
y
Z
j 1+( ) 4,
−
Z
j 1+( ) 2,
Z
j 1+( ) 4,
−
⋅ P
y
−+
...
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+ m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
:=
z'' j( )
0.15
π
E F⋅
h
z
Z
j 1+( ) 4,
+
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+
m'
k
H Z
j 1+( ) 4,
− h
z
−
⋅+
...
⋅⋅ Z
j 1+( ) 3,
Z
j 1+( ) 7,
−
⋅
E F⋅
h
z
Z
j 1+( ) 4,
+
Z
j 1+( ) 2,
Z
j 1+( ) 6,
−
⋅ P
z
−+
...
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+ m'
k
H Z
j 1+( ) 4,
− h
z
−
⋅+
:=
x'' j( ) if Z
j 1+( ) 3,
0≤ 0,
0.15
π
E F⋅
h
y
Z
j 1+( ) 4,
−
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+
m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
...
⋅
⋅ Z
j 1+( ) 5,
Z
j 1+( ) 3,
−
⋅
0.15
π
E F⋅
h
z
Z
j 1+( ) 4,
+
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+
m'
k
H Z
j 1+( ) 4,
− h
z
−
⋅+
...
⋅
⋅ Z
j 1+( ) 7,
Z
j 1+( ) 3,
−
⋅
+
...
E F⋅
h
y
Z
j 1+( ) 4,
−
Z
j 1+( ) 4,
Z
j 1+( ) 2,
−
⋅
E F⋅
h
z
Z
j 1+( ) 4,
+
Z
j 1+( ) 6,
Z
j 1+( ) 2,
−
⋅+
+
...
F
т
t' j( )( )−
( )
k
y
Z
j 1+( ) 3,
Z
j 1+( ) 5,
−
⋅−+
...
m
x
,
:=
0 1 2 3 4 5 6 7 8 9 10
5
0
5
10
15
Время, сек
Ускорение, м/сек^2
a
п.доп
−
x'' j( )
y'' j( )
x' j( )
F
v
j( )
m
x
Z
j 1+( ) 1,
Рис.13
47
Динамические нагрузки в канатах при таком способе торможения составят
S
гр
j( ) m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+ m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
9.81⋅ y'' j( ) m
cy
⋅+ P
y
9.81⋅−:=
S
пор
j( ) m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+ m'
k
H h
z
− Z
j 1+( ) 4,
−
⋅+
9.81⋅ z'' j( ) m
cz
⋅− P
z
9.81⋅+:=
0 1 2 3 4 5 6 7 8
4
.
10
5
6
.
10
5
8
.
10
5
1
.
10
6
Время, с
Натяжения, Н
S
гр
j( )
S
пор
j( )
Z
j 1+( ) 1,
Рис.14
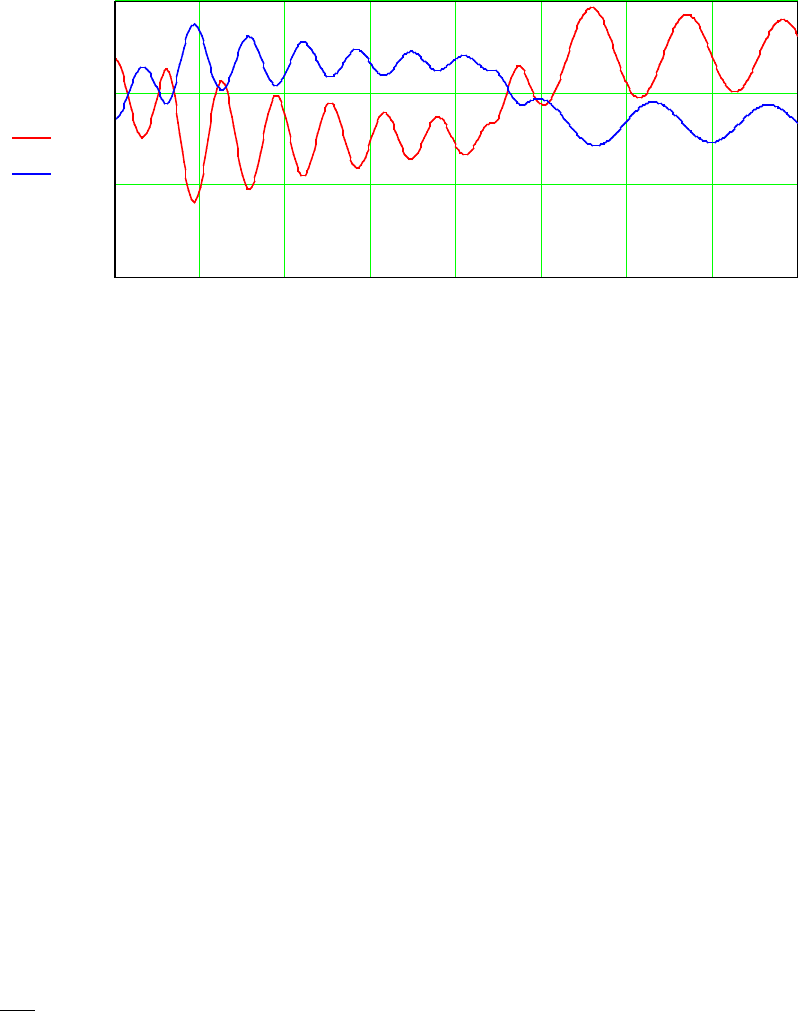
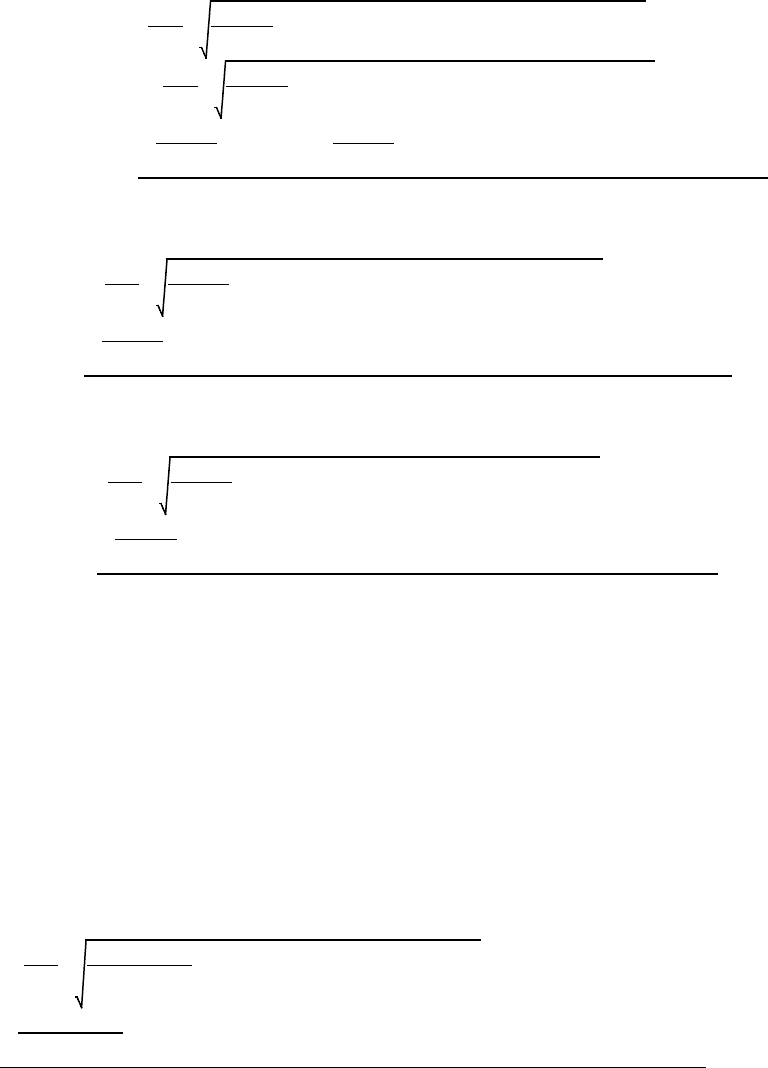
Cравним графики замедлений при предохранительном торможении с реальной тормозной
характеристикой и демпфировании колебаний при помощи системы автоматического регулирования
тормозом.
Время торможения увеличилось на 1,8 сек. В промежутке времени с 1,6сек до 4,7 сек
наблюдается практически полное демпфирование колебаний. Последние ярко выражены только при
изменении тормозного усилия. После стопорения машины можно также наблюдать значительное снижение
колебаний. Их амплитуда не превышает 0,01 м/сек^2.
Из сравнения графиков нагрузок в канатах можно сделать следующие выводы. Во время
торможения полное натяжение гружёной ветви каната в режиме демпфирования снижено на 50 кН. После
торможения наблюдаются небольшие периодические динамические нагрузки с максимальной амплитудой
690 кН. По сравнению с торможением с реальной характеристикой они снижены на 230 кН.
Как видно, такой способ торможения также эффективен.
.
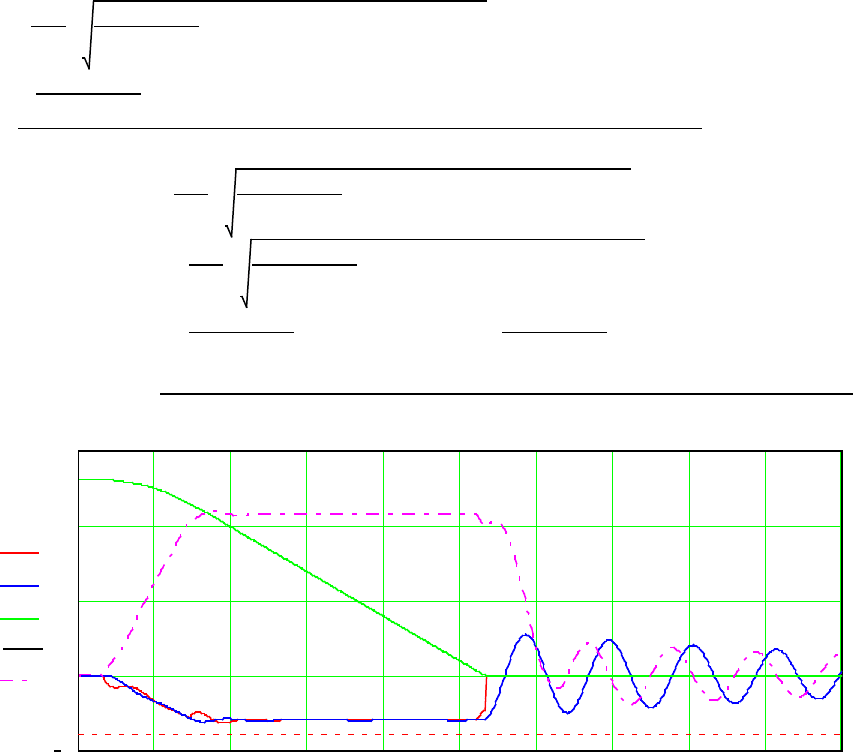
6.5 Моделирование динамических процессов при рабочем торможении
Матрица начальных скоростей и
перемещений
h' x
1
x
2
+ x
3
+ x
4
+ x
5
+ x
6
+:=
h
y
H h
п
− h'−:=
- задание текущего положения
сосудов гружёной и порожней
ветвей канатов.
v
0
v
m
0
v
m
0
v
m
:=
h
z
h
k
h'+:=
48
D t v,( )
v
2
if v
2
0≤ 0,
0.15
π
E F⋅
h
y
v
3
−
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
⋅
⋅ v
4
v
2
−
( )
⋅
0.15
π
E F⋅
h
z
v
3
+
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H v
3
− h
z
−
( )
⋅+
⋅⋅ v
6
v
2
−
( )
⋅
+
...
E F⋅
h
y
v
3
−
v
3
v
1
−
( )
⋅
E F⋅
h
z
v
3
+
v
5
v
1
−
( )
⋅+ F
дв
t( )+ F'
ст
t( )−+
...
m
x
,
v
4
0.15
π
E F⋅
h
y
v
3
−
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
⋅⋅
v
2
v
4
−
( )
⋅
E F⋅
h
y
v
3
−
v
1
v
3
−
( )
⋅ P
y
−+
...
m
cy
m
k
h
y
v
3
−
( )
⋅+ m'
k
h
п
h'+ v
3
+
( )
⋅+
v
6
0.15
π
E F⋅
h
z
v
3
+
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H h
z
− v
3
−
( )
⋅+
⋅
⋅ v
2
v
6
−
( )
⋅
E F⋅
h
z
v
3
+
v
1
v
5
−
( )
⋅ P
z
−+
...
m
cz
m
k
h
z
v
3
+
( )
⋅+ m'
k
H h
z
− v
3
−
( )
⋅+
:=
Z rkfixed v t
d
, t
ц
, 1000, D,
( )
:=
j 0 1000..:=
Получим решение системы в виде графика ускорения.
y' j( ) Z
j 1+( ) 5,
:=
- скорость гружёного сосуда ;
z' j( ) Z
j 1+( ) 7,
:=
- скорость порожнего сосуда ;
x' j( ) Z
j 1+( ) 3,
:=
- скорость машины ;
t j( ) Z
j 1+( ) 1,
:=
- время.
49
y'' j( )
0.15
π
E F⋅
h
y
Z
j 1+( ) 4,
−
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+
m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
...
⋅⋅
Z
j 1+( ) 3,
Z
j 1+( ) 5,
−
⋅
E F⋅
h
y
Z
j 1+( ) 4,
−
Z
j 1+( ) 2,
Z
j 1+( ) 4,
−
⋅ P
y
−+
...
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+ m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
:=
z'' j( )
0.15
π
E F⋅
h
z
Z
j 1+( ) 4,
+
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+
m'
k
H Z
j 1+( ) 4,
− h
z
−
⋅+
...
⋅⋅ Z
j 1+( ) 3,
Z
j 1+( ) 7,
−
⋅
E F⋅
h
z
Z
j 1+( ) 4,
+
Z
j 1+( ) 2,
Z
j 1+( ) 6,
−
⋅ P
z
−+
...
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+ m'
k
H Z
j 1+( ) 4,
− h
z
−
⋅+
:=
x'' j( ) if Z
j 1+( ) 3,
0≤ 0,
0.15
π
E F⋅
h
y
Z
j 1+( ) 4,
−
m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+
m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
...
⋅⋅ Z
j 1+( ) 5,
Z
j 1+( ) 3,
−
⋅
0.15
π
E F⋅
h
z
Z
j 1+( ) 4,
+
m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+
m'
k
H Z
j 1+( ) 4,
− h
z
−
⋅+
...
⋅⋅ Z
j 1+( ) 7,
Z
j 1+( ) 3,
−
⋅
+
...
E F⋅
h
y
Z
j 1+( ) 4,
−
Z
j 1+( ) 4,
Z
j 1+( ) 2,
−
⋅
E F⋅
h
z
Z
j 1+( ) 4,
+
Z
j 1+( ) 6,
Z
j 1+( ) 2,
−
⋅+
+
...
F
дв
t j( )( ) F'
ст
t j( )( )−+
...
m
x
,
:=
35 40 45 50 55 60 65
1.5
1
0.5
0
0.5
1
Время, сек
Ускорение, м/сек^2
x'' j( )
y'' j( )
x' j( )
v
m
F
дв
t j( )( )
3 F
ст
⋅
Z
j 1+( ) 1,
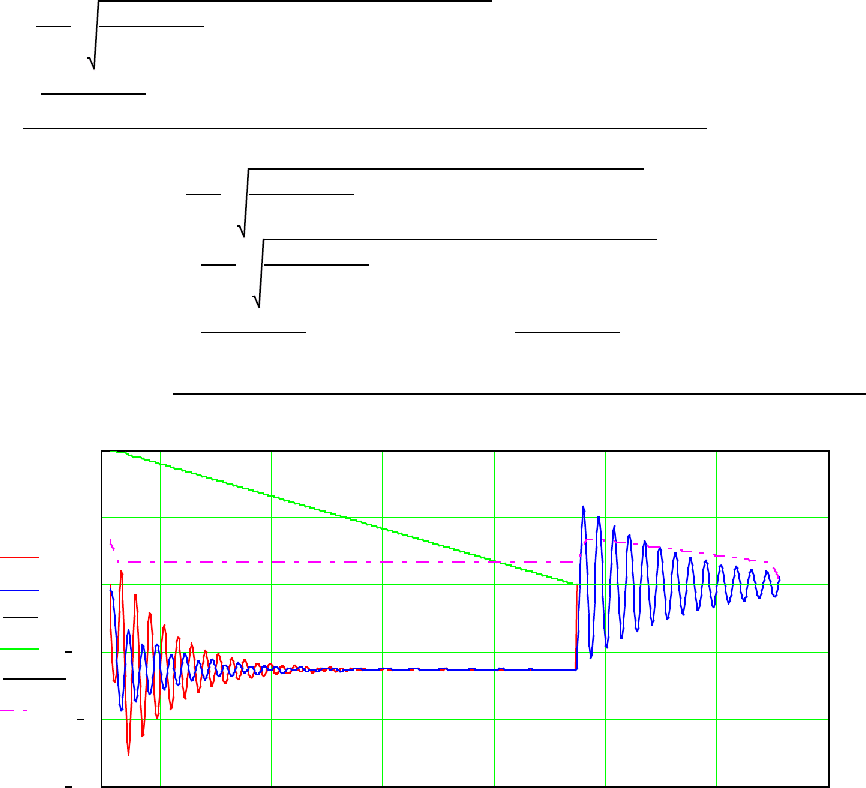
Рис.15
50
Проанализируем динамические нагрузки в канатах при рабочем торможении
S
гр
j( ) m
cy
m
k
h
y
Z
j 1+( ) 4,
−
⋅+ m'
k
h
п
h'+ Z
j 1+( ) 4,
+
⋅+
9.81⋅ m
cy
y'' j( )⋅+ P
y
9.81⋅+:=
S
пор
j( ) m
cz
m
k
h
z
Z
j 1+( ) 4,
+
⋅+ m'
k
H Z
j 1+( ) 4,
− h
z
−
⋅+
9.81⋅ m
cz
z'' j( )⋅− P
z
9.81⋅−:=