Дипломный прект - Исследование динамических процессов многоканатной скиповой подъёмной установки, работающей в условиях рудника Верхнекамского калийного месторождения
Подождите немного. Документ загружается.

В случае уравновешенного подъёма с противовесом статическое сопротивление будет
равно
k 1.15:=
F
ст
k 0.5−( ) Q
p
⋅ 9.81⋅:=
, здесь
к- коэффициент, учитывающий вредные сопротивления движению( от трения направляющих
лап сосудов о шахтные проводники, от изгиба и трения канатов на органах навивки, от трения в
подшипниках, а также от сопротивления воздуха. Для скипового подъёма
k 1.15:=
13
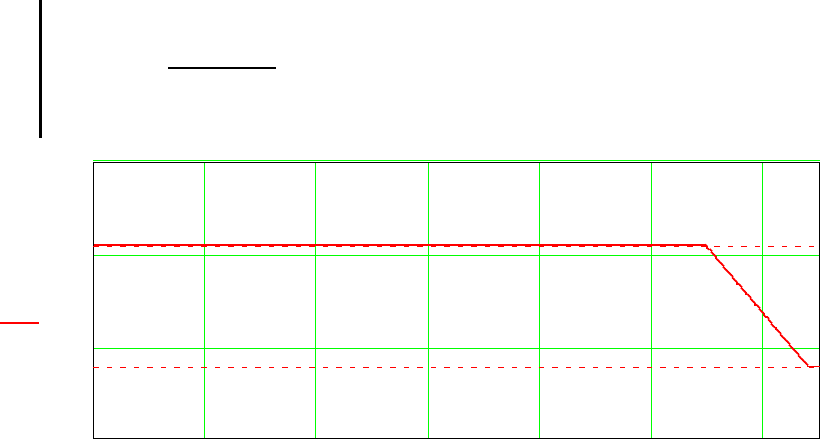
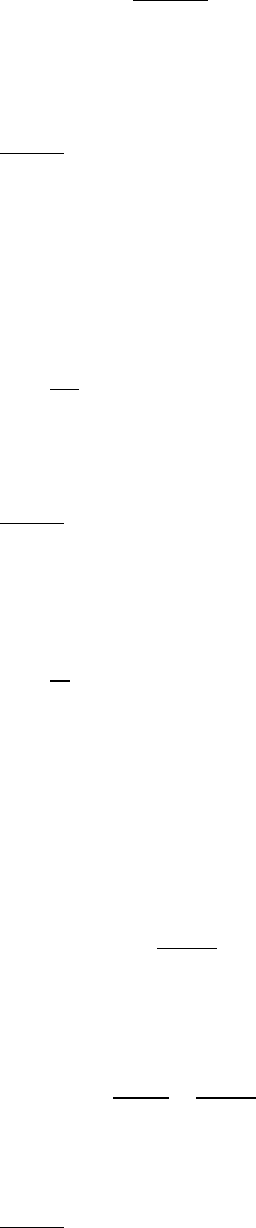
Как видно из последней формулы, статическое сопротивление является постоянной
величиной и, в отличие от неуравновешенной ПУ, не зависит от высоты подъёма, за
исключением момента входа скипа в разгрузочные кривые. В этом случае Fст уменьша- ется на
величину 0.4Qp (1ч.2,стр.12). Продемонстрируем это на графике.
t 0 .1, 70..:=
t'
ц
63.916:=
t'
g
54.746:=
F'
ст
t( ) F
ст
0 t≤ t'
g
<if
F
ст
t t'
g
−
( )
0.4 Q
p
⋅ 9.81⋅
t'
ц
t'
g
−
⋅− t'
g
t< t'
ц
<if
0.25 Q
p
⋅ 9.81⋅ otherwise
:=
0 10 20 30 40 50 60
1
.
10
5
2
.
10
5
3
.
10
5
0.25 Q
p
⋅ 9.81⋅
F
ст
F'
ст
t( )
t
.
Рис.1 Статическое сопротивление уравновешенной ПУ
3.11 Кинематика подъёма
Формирование динамических нагрузок зависит от величины ускорения или замедления и
интенсивности их изменения ( рывка ). С целью уменьшения динамических нагрузок и увеличения
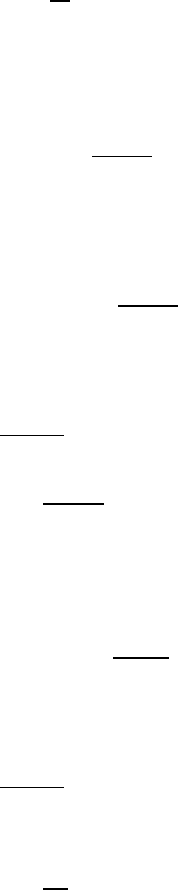
долговечности эксплуатации ПУ с приводом постоянного тока рекомендуется применять пятипериодные
диаграммы ускорений (замедлений) без скачкообразных изменений .
.
.
.
.
.
.
.
Рис.2 Пятипериодная диаграмма ускорения
.
14
.
Суть диаграммы ускорений заключается в том, что приводной двигатель формирует такое
движущее усилие, которое на участке t1 изменяет ускорение от нуля до величины a1. Рекомендованное
значение a1=0.3 м/с^2 обеспечивает выход скипа из разгру-
зочных кривых со скоростью v1<1.5 м/с, регламентируемой ОНТП. Затем на участке t3 происходит
изменение движущего усилия, которое позволяет достигнуть максимальной расчётной величины ускорения
a2. Для многоканатной ПУ a2<0.6 м/с^2. На участке t4 подъёмная система движется равноускоренно с
ускорением a2. Для получения благоприятного режима в период t5 (когда скорость близка к максимальной),
ускорение уменьшается до нуля. Допустимое значение рывка может быть получено при
t
р
0.1 t
1
t
2
+ t
3
+ t
4
+ t
5
+
( )
⋅
(7,стр.25) ,
где tp-время формирования движущего усилия.Для периода замедления всё происходит
аналогично с незначительными изменениями,связанными с формированием периода дотяжки. Оптимальная
тахограмма движения концевого груза, при которой полностью отсутствуют колебания, получается при
трапецеидальном законе изменения ускорения (замедления) с периодами нарастания и уменьшения
ускорений (замедлений) равными T-периоду собственных колебаний системы. Его можно определить как
.
.
Τ
2 π⋅
m
x
m
y
+
m
x
m
y
⋅
c
y
⋅
(7,стр.26), здесь
m
x
- эквивалентная масса машины ;
.
m
y
- эквивалентная масса груженой ветви ;
c
y
- жесткость канатов груженой ветви . Эти параметры можно определить
m
x
m
маш
m
шк
+ m
рот
+
ρ
г
n
г
⋅ H⋅
3
+
n
х
ρ
х
⋅ H⋅
3
+:=
(7,стр39) ;
m
x
4.686 10
4
×=
кг.
а) для начала подъема
c
y
n
г
11⋅ 10
10
⋅ 8.51⋅
H h
п
−
10
4−
⋅:=
(консп. лекц.),
c
y
8.371 10
5
×=
Н/м;
m
y
Q
p
Q
m
+
n
г
ρ
г
⋅ H h
п
−
( )
⋅
3
+ n
х
ρ
х
⋅ h
п
⋅+:=
,
m
y
6.595 10
4
×=
кг.
T
2 π⋅
m
x
m
y
+
m
x
m
y
⋅
c
y
⋅
:=
,
T 1.137=
с.
15
б) для конца подъема
c'
y
n
г
11⋅ 10
10
⋅ 8.51⋅
h
k
10
4−
⋅:=
,
c'
y
7.752 10
6
×=
Н/м.
m'
y
Q
p
Q
m
+
n
г
ρ
г
⋅ h
k
⋅
3
+ n
х
ρ
х
⋅ h
п
H
p
+
( )
⋅+:=
,
m'
y
7.465 10
4
×=
кг.
T'
2 π⋅
m
x
m'
y
+
m
x
m'
y
⋅
c'
y
⋅
:=
,
T' 0.383=
с.
Определим кинематические параметры рассматриваемой ПУ для каждого периода
по методике (7,стр.26-28) .
Период
t
1
t
1
T:=
a
1
0.3:=
м/с^2;
ρ
1
a
1
t
1
:=
,
ρ
1
0.264=
м/с^3 ;
v
1
ρ
1
t
1
2
2
⋅:=
,
v
1
0.17=
м/с ;

x
1
ρ
1
t
1
3
6
⋅:=
,
x
1
0.065=
м .
Период
t
2
a
1
0.3:=
м/с^2;
v
2
1.2:=
м/с ;
t
2
v
2
v
1
−
a
1
:=
,
t
2
3.432=
с;
x
2
v
1
t
2
⋅
a
1
t
2
2
⋅
2
+:=
,
x
2
2.352=
м.
Период
t
3
t
3
T:=
a
2
0.6:=
м/с^2;
16
ρ
3
a
2
a
1
−
t
3
:=
,
ρ
3
0.264=
м/с^3;
v
3
v
2
a
1
t
3
⋅+ ρ
3
t
3
2
2
⋅+:=
,
v
3
1.711=
м/с;
x
3
v
2
t
3
⋅
a
1
t
3
2
⋅
2
+ ρ
3
t
3
3
6
⋅+:=
,
x
3
1.622=
м.
Период
t
5
t
5
T:=
;
ρ
5
a
2
t
5
:=
,
ρ
5
0.528=
м/с^3 ;
v
5
v
m
:=
м/с ;
Скорость периода
t
4
v
4
v
5
a
2
t
5
⋅− ρ
5
t
5
2
2
⋅+:=
,
v
4
12.749=
м/с ;
x
5
v
4
t
5
⋅
a
2
t
5
2
⋅
2
+ ρ
5
t
5
3
6
⋅−:=
,
x
5
14.75=
м.
Период
t
4
t
4
v
4
v
3
−
a
2
:=
,
t
4
18.396=
с;
x
4
v
3
t
4
⋅
a
2
t
4
2
⋅
2
+:=
,
x
4
133.006=
м.
Период
t
11
a
11
0.5:=
м/с^2.
t
11
T':=
ρ
11
a
11
t
11
:=
,
ρ
11
1.306=
м/с^3.
x
11
0.5 t
11
⋅
ρ
11
t
11
3
⋅
6
−:=
,
x
11
0.179=
м.
17
Период
t
10
v
10
0.5:=
м/с;
h
0
2.17:=
м;
x
10
2 h
0
⋅ x
11
−:=
м.
t
10
x
10
v
10
:=
,
t
10
8.322=
с.
Период
t
9
a
8
0.6:=
м/с^2;
t
9
T':=
ρ
9
a
8
t
9
:=
,
ρ
9
1.567=
м/с^3;
v
9
0.5:=
м/с;
Скорость периода
t
8
v
8
v
9
a
8
t
9
⋅+
ρ
9
t
9
2
⋅
2
−:=
,
v
8
0.615=
м/с;
x
9
v
8
t
9
⋅
a
8
t
9
2
⋅
2
−
ρ
9
t
9
3
⋅
6
+:=
,
x
9
0.206=
м.
Период
t
7
t
7
T':=
ρ
7
a
8
t
7
:=
,
ρ
7
1.567=
м/с^3;
v
7
v
m
ρ
7
t
7
2
⋅
2
−:=
,
v
7
12.975=
м/с;
x
7
v
m
t
7
⋅
ρ
7
t
7
3
⋅
6
−:=
,
x
7
4.997=
м.
Период
t
8
t
8
v
7
v
8
−
a
8
:=
,
t
8
20.6=
с;
x
8
v
7
t
8
⋅
a
8
t
8
2
⋅
2
−:=
,
x
8
139.979=
м.
Период
t
6
x
6
H
p
x
1
− x
2
− x
3
− x
4
− x
5
− x
7
− x
8
− x
9
− x
10
− x
11
−:=
t
6
x
6
v
m
:=
,
t
6
7.462=
с.
18
Ïостроим диаграммы ускорения и скорости ПУ для полного цикла подъема
t 0 .1, 70..:=
t
a
t
1
t
2
+:=
t
b
t
a
t
3
+:=
t
c
t
b
t
4
+:=

t
p
t
c
t
5
+:=
t
d
t
p
t
6
+:=
t
e
t
d
t
7
+:=
t
f
t
e
t
8
+:=
t
g
t
f
t
9
+:=
t
h
t
g
t
10
+:=
t
ц
t
h
t
11
+:=
t
ц
62.77=
t
g
54.066=
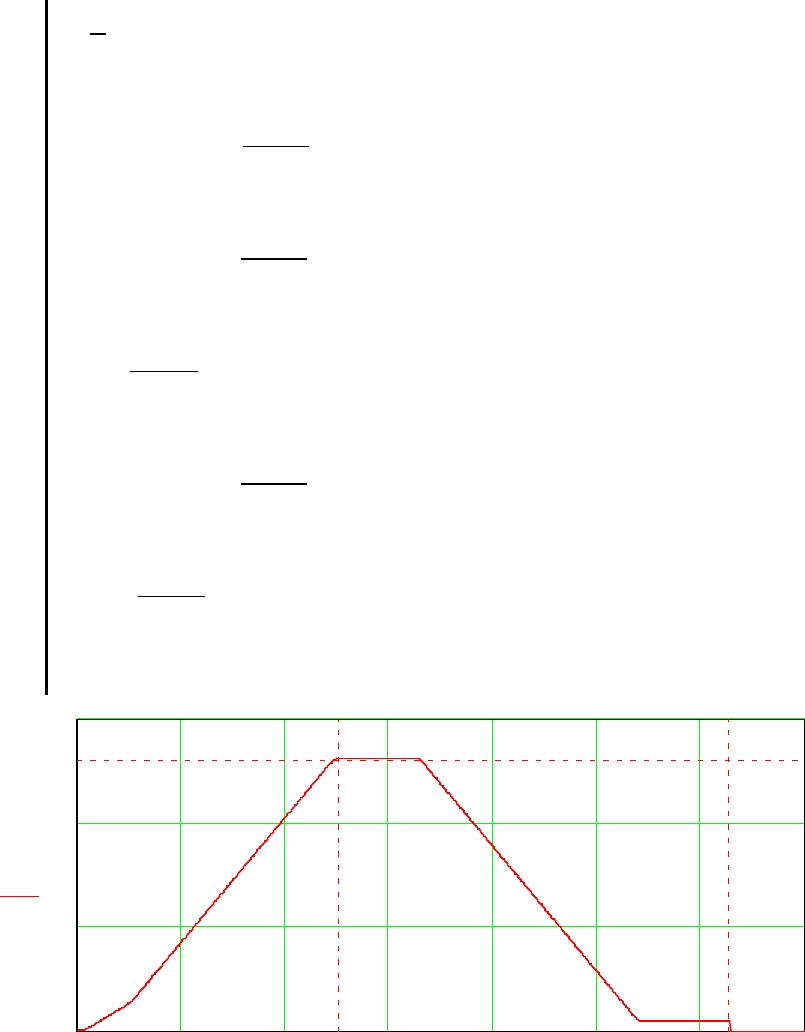
Построение диаграммы ускорений
a t( ) ρ
1
t⋅ 0 t≤ T<if
a
1
T t< t
a
<if
a
1
ρ
3
t t
a
−
( )
⋅+ t
a
t< t
b
<if
a
2
t
b
t< t
c
<if
a
2
ρ
5
t t
c
−
( )
⋅− t
c
t< t
p
<if
0 t
p
t< t
d
<if
ρ
7
− t t
d
−
( )
⋅ t
d
t< t
e
<if
a
8
− t
e
t< t
f
<if
a
8
− ρ
9
t t
f
−
( )
⋅+ t
f
t< t
g
<if
0 t
g
t< t
h
<if
ρ
11
− t t
h
−
( )
⋅ t
h
t< t
ц
<if
a
11
− t t
ц
≥if
0 otherwise
:=
0 10 20 30 40 50 60 70
1
0
1
a
1
a
2
a t( )
t
h
t
p
t
Рис.3 Диаграмма ускорений (замедлений) для полного цикла подъёма.
19
Построение диаграммы скоростей
v t( ) ρ
1
t
2
2
⋅ 0 t< T<if
v
1
a
1
t T−( )⋅+ T t< t
a
<if
v
2
a
1
t t
a
−
( )
⋅+ ρ
3
t t
a
−
( )
2
2
⋅+ t
a
t< t
b
<if
v
3
a
2
t t
b
−
( )
⋅+ t
b
t< t
c
<if
v
4
a
2
t t
c
−
( )
⋅+ ρ
5
t t
c
−
( )
2
2
⋅− t
c
t< t
p
<if
v
5
t
p
t< t
d
<if
v
5
ρ
7
t t
d
−
( )
2
2
⋅− t
d
t< t
e
<if
v
7
a
8
t t
e
−
( )
⋅− t
e
t< t
f
<if
v
8
a
8
t t
f
−
( )
⋅− ρ
9
t t
f
−
( )
2
2
⋅+ t
f
t< t
g
<if
v
9
t
g
t< t
h
<if
v
9
ρ
11
t t
h
−
( )
2
2
⋅− t
h
t< t
ц
<if
0 t t
ц
>if
0 otherwise
:=
0 10 20 30 40 50 60 70
0
5
10
15
v
m
v t( )
t
ц
t
p
t
Рис.4 Тахограмма скорости для полного цикла подъёма.
20
3.12 Определение движущих усилий
Динамическое уравнение подъема для машин с постоянным радиусом навивки может быть
определено
а) для периода ускорения
F
дв
t( ) F'
ст
t( ) m a t( )⋅+:=
б) для периода равномерного движения

F''
дв
t( ) F'
ст
t( ):=
(1ч.2,стр.4)
в) для периода замедления
F'
дв
t( ) F'
ст
t( ) m a t( )⋅−:=
Пострим график изменения движущего усилия ПУ за цикл подъема при заданных законах
изменения ускорения и замедления .
0 10 20 30 40 50 60 70
1
.
10
5
0
1
.
10
5
2
.
10
5
3
.
10
5
4
.
10
5
F
ст
F
дв
t( )
t
Рис.5 График изменения движущего усилия
3.13 Определение эффективного усилия
Построенный график изменения движущего усилия является нагрузочной диаграммой для
электродвигателя ПУ .Для определения необходимой мощности двигателя необходимо его фактический
режим работы с переменной нагрузкой привести к условному эквивалентному по нагреву режиму с
постоянной нагрузкой . Такой постоянной нагрузкой является эффективное усилие Fэф приводного
двигателя, которое определяется
T
эф
t
ц
Θ+:=
-для привода постоянного тока .
F
эф
0
T
эф
tF
дв
t( )
2
⌠
⌡
d
T
эф
:=
(1ч.2,стр.39) ;
F
эф
1.922 10
5
×=
Н.
3.14 Определение фактической мощности двигателя
Эффективная мощность двигателя определяется по эффективному усилию
P
F
эф
v
m
⋅
1000 0.97⋅
:=
(1ч.2,стр41) ,
P 2.594 10
3
×=
кВт.
21
Величина мощности двигателя принимается на 10% больше эффективной мощности ( для
учета возможного падения напряжения в сети )
P
дв
1.1 P⋅:=
(1ч.2,стр.39);