Дипломная работа: Синтез гибридной нейронной сети для управления двухмассовой электромеханической системой с зазором. 2003 г
Подождите немного. Документ загружается.

81
5.3 Регулятор с использованием разностных сигналов и с коррекцией
управляющего сигнала, использование интегратора
Неустранимую ошибку по возмущению можно было бы уменьшить или даже свести к
нулю путем увеличения сигнала задания в ответ на приложение момента сопротивления к
механической части. Поскольку в нашей системе и так есть сигнал отклонения скорости
двигателя от заданной, (сигнал обратной связи в предыдущей схеме).
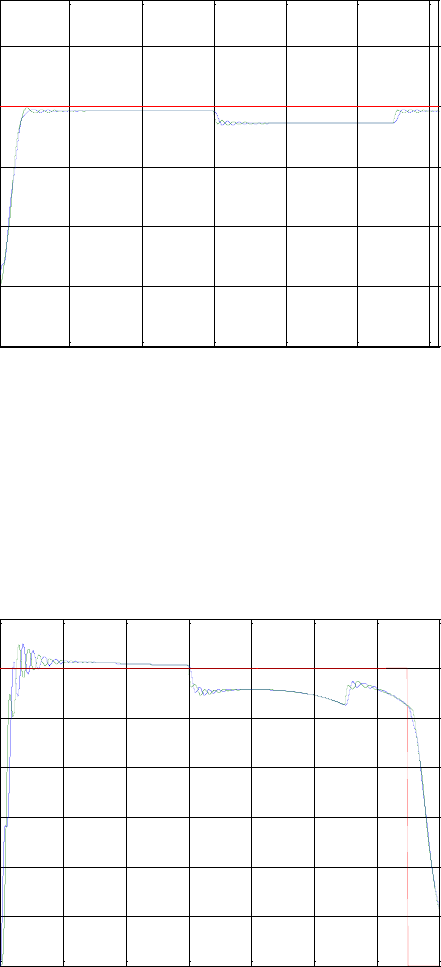
Переходный процесс в системе с коррекцией управляющего сигнала представлены на
рисунке 5.3.1.
0 1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
w1
sollen
1.5 %
w1/wn
sollen
t,c
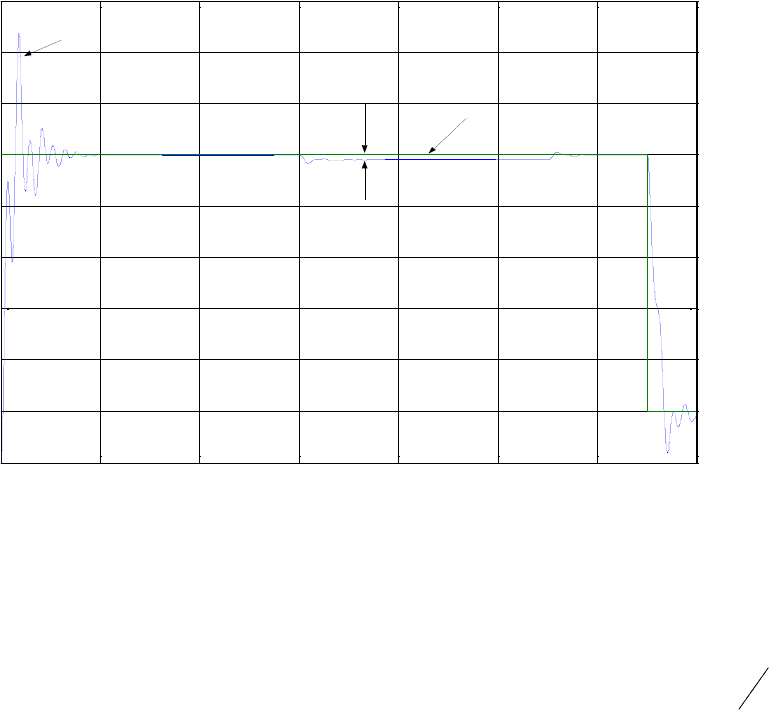
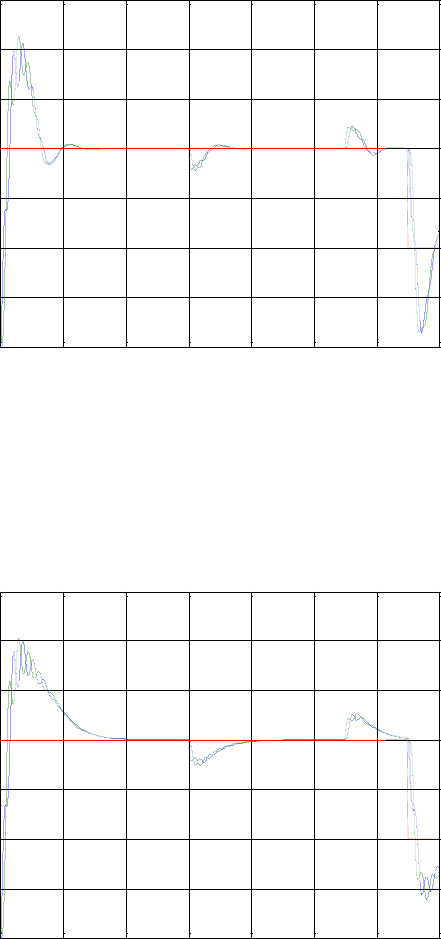
Рисунок5.3.1.Переходный процесс скорости и график задающего сигнала при коррекции
управляющего сигнала по разности заданной скорости и реальной скорости привода.
Однако даже корректирование скорости привело только к снижению уровня статической
ошибки, но не к ее устранению. Перерегулирование в этой системе увеличивается до 38%.
Уровень статической ошибки по управлению остается по прежнему малой 0.00005
ном
дв
статическая ошибка по возмущению составляет 1.5% от заданного значения или 0.009.
Таким образом уровень статической ошибки регулирования скорости в данной системе
может быть снижен до величины в доли процента.
Однако даже увеличение, с помощью коэффициента усиления, корректирующего сигнала
в 1.1 – 5 раз не позволяет избавиться от хоть и малой но существующей статической
ошибки по возмущающему сигналу, приводя только к ее уменьшению, росту
перерегулирования и колебательности объекта регулирования.
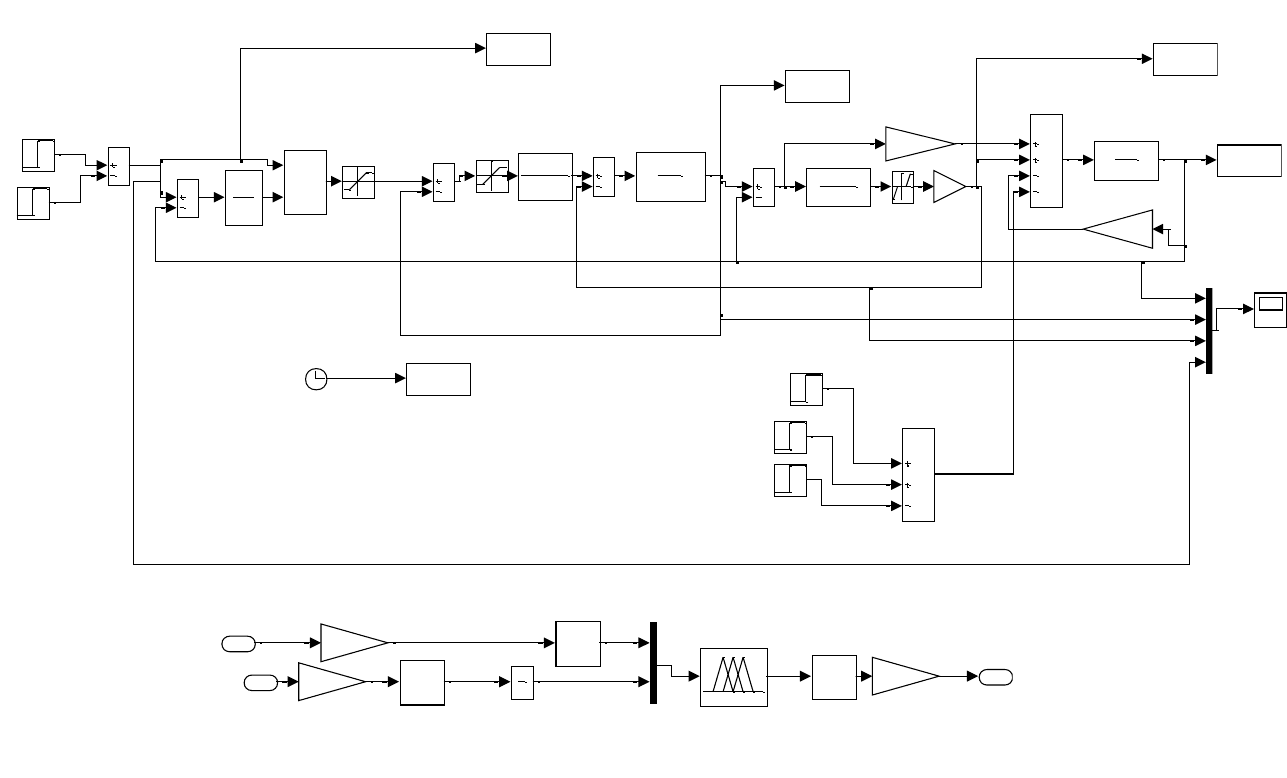
Этого недостатка позволяет избежать применение интегратора в цепи обратной связи, в
канале получения разностного сигнала. Структурная схема представлена на рисунке 5.3.2.
82
1
TL.s
1
Tm.s
1
Tfider.s
1
Tm.s
3.5
Tsum.s+1
sollen
t
M
w1
w2
-K-
beta1
beta2
Clock
In1
In2
Out1
ANFIS
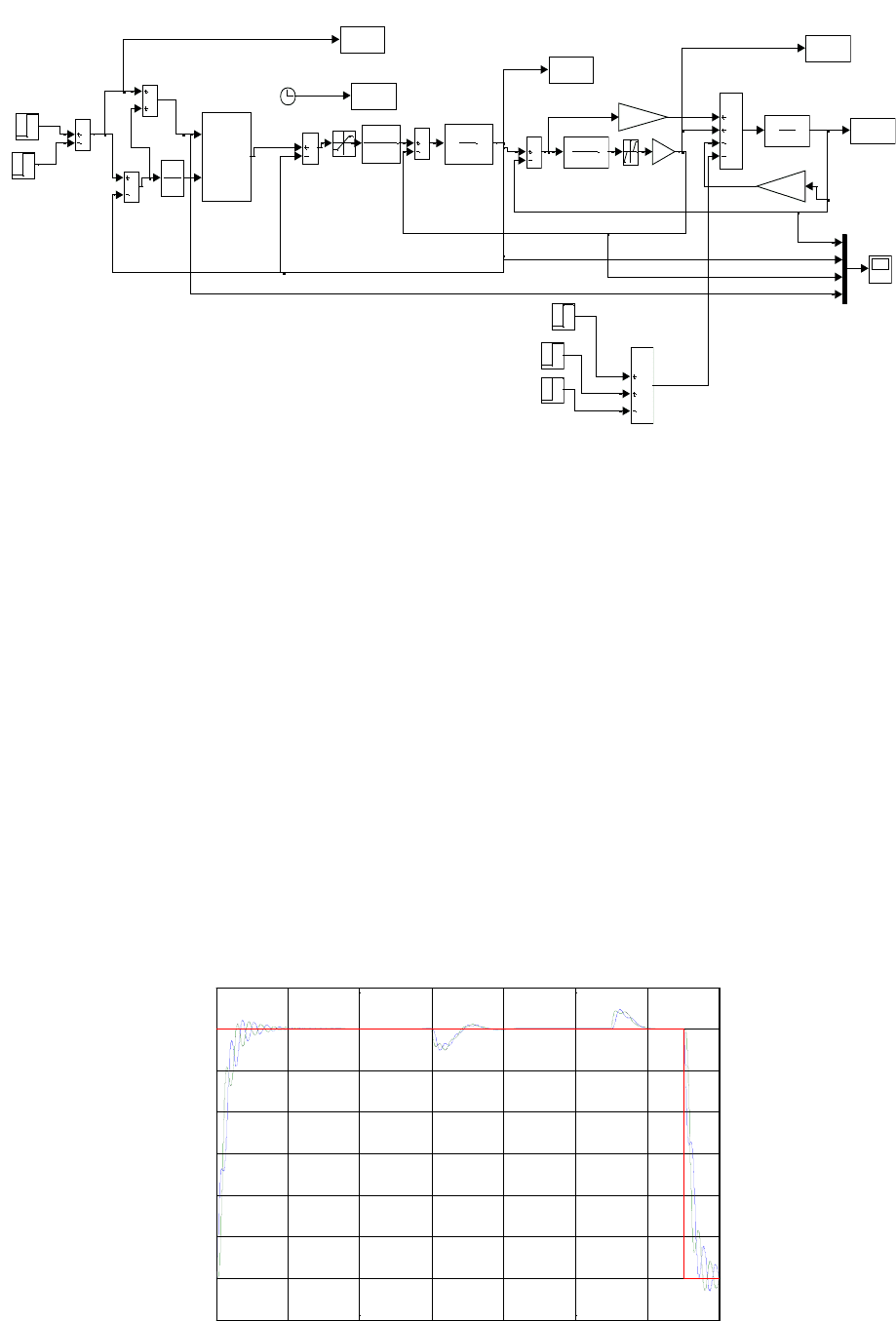
Рисунок 5.3.2 Структурная схема системы при корректировании сигнала управления и с
интегрированием ошибки регулирования.
График переходного процесса в системе с коррекцией управляющего сигнала с
интегратором представлен на рисунке 5.3.3. В этом случае, перерегулирование составляет
42%. Статической ошибки по возмущению и по управлению в данной схеме нет, из-за
влияния интегратора, накапливающего ошибку отклонения реальной скорости от
заданной. Интегратор постоянно поддерживает сигнал разности реальной и заданной
скорости.
5.4 Регулятор с использованием интегратора
Применение интегратора позволяет сразу добиться астатического переходного процесса
скорости. Но остаются трудности с большим перерегулированием и динамическими
просадками и выбросами скорости при набросе и сбросе нагрузки ступенькой.
График переходного процесса скоростей первой и второй масс представлен на рисунке
5.4.1.
0 1 2 3 4 5 6 7
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
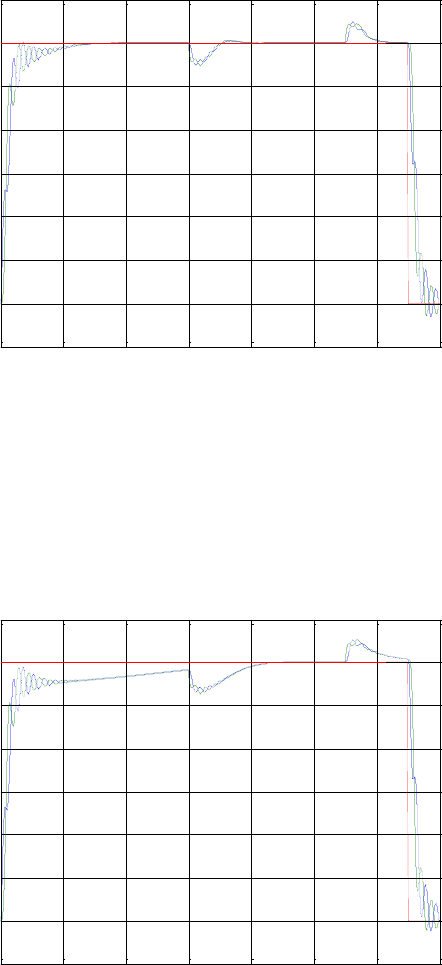
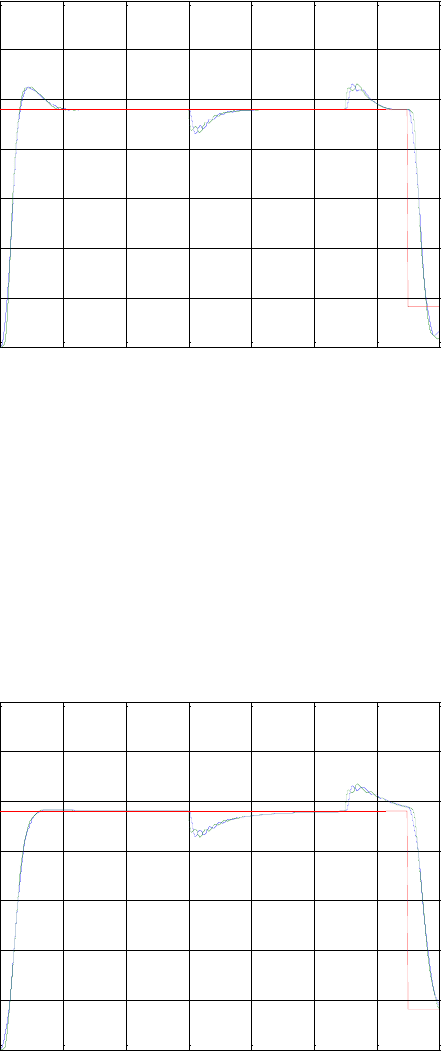
Рисунок 5.4.1 Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. Ти=0.4с.
83
Перерегулирование составляет 0.5%. Выброс скорости , равный динамической просадке
скорости, равен 5%.
0 1 2 3 4 5 6 7
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Рисунок 5.4.2 Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. Ти=0.5с.
Как можно заметить из рисунка 5.4.2 увеличение постоянной времени интегратора
привело к тому, что перерегулирование равно нулю, динамическая ошибка скорости не
изменилась и равна 5 %
0 1 2 3 4 5 6 7
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Рисунок 5.4.3.Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. Ти=1с.
Графики на последнем рисунке свидетельствуют, что затягивание переходного процесса с
помощью интегрирующего звена убирает перерегулирование, но не влияет на
динамическую ошибку.
84
0 1 2 3 4 5 6 7
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Рисунок 5.4.4 Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. Ти=0.1с
Рисунок 5.4.4 свидетельствует, что при малых постоянных времени интегратора не только
теряется астатизм системы, но так же возрастает колебательность и перерегулирование
скорости.
В целом можно сказать, что применение интегратора позволило избавиться от
статической ошибки по управляющему и возмущающему воздействию, сведя их к нулю.
Но в то же время, такой регулятор перестает быть чисто нейронным, и параметры самого
интегратора нельзя сразу подобрать оптимальными. Начальным значением постоянной
интегратора экспериментально рекомендуется принять равной механической постоянной
времени двигателя.
Перерегулирование в данной схеме связано с временем переходного процесса и с
постоянной времени интегратора. Уменьшение этой постоянной ускоряет переходный
процесс, но в то же время уменьшает стабильность системы, и может даже привести к
потере астатизма а статическая ошибка в этом случае может быть больше чем в системе
на основе разности реальной и заданной скоростей.
85
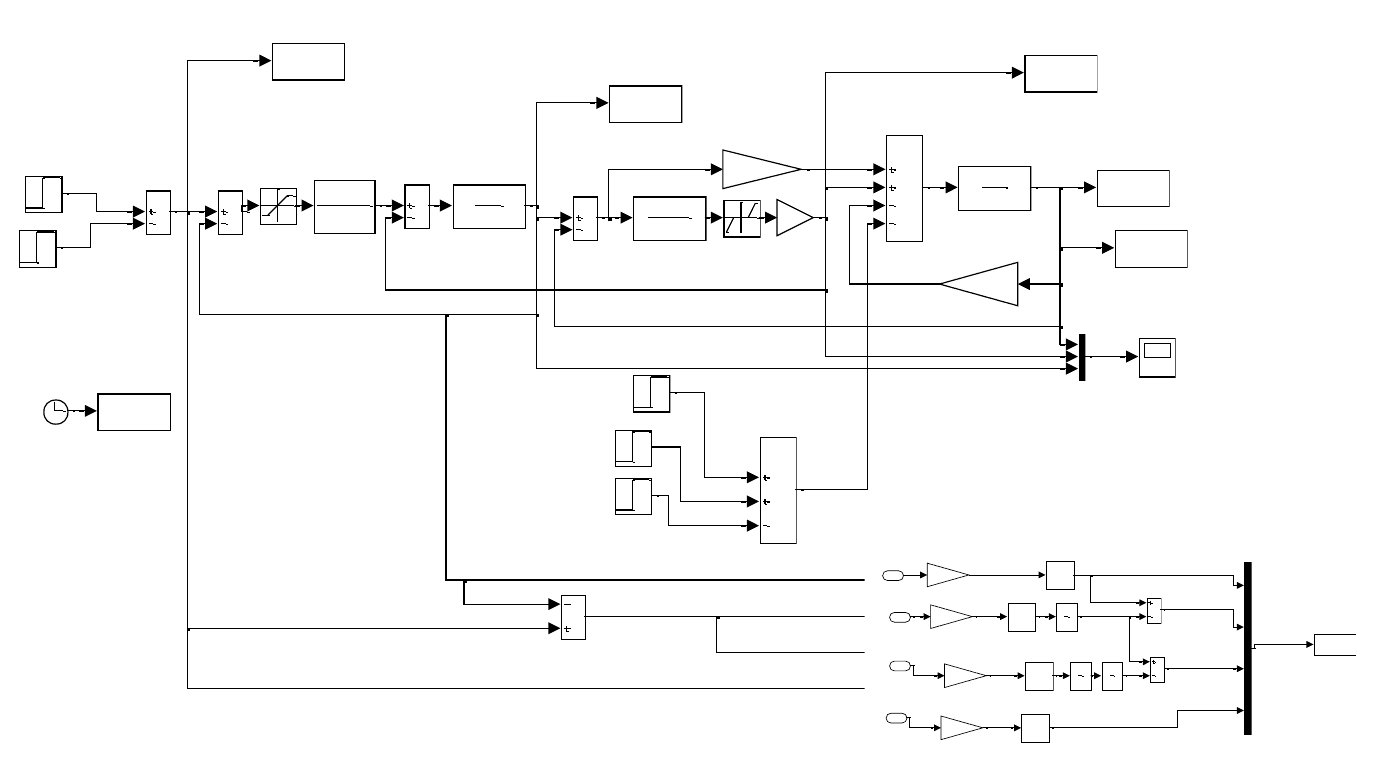
Рисунок 5.4.5 Структурная схема системы с регулятором.
1
TL.s
1
0.4s
1
Tfider.s
1
Tm.s
3.5
Tsum.s+1
sollen
t
M
w1
w2
In1
In2
Out1
Subsystem
-K-
beta1
beta2
Clock
1
Out1
z
1
1
Gain4
1
Gain3
1
Gain1
Fuzzy Logic
Controller
In1Out1
A&D Convertor2
In1Out1
A&D Convertor1
In1Out1
A&D Convertor
2
In2
1
In1
86
5.5 Регулятор с дифференцирующими звеньями на входе
Явное вычисление производных такого же порядка, как и порядок объекта регулирования,
предположительно должно было дать положительные результаты по принципу схемы на
основе задержек.
1 2 3 4 5 6
-0.1
0
0.1
0.2
0.3
0.4
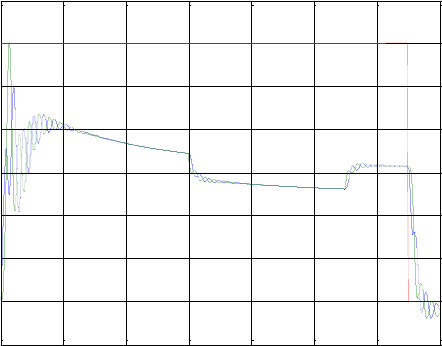
Рисунок 5.5.1 Переходный процесс скоростей первой и второй массы в системе с ANFIS.
На основе производных.
Из рисунка 5.5.1 следует, что явное вычисление производных уменьшает уровень
статической ошибки регулирования, составляющей 3.5%, и практически устраняет
колебания. Уровень статической ошибки по возмущению составляет 8 %. Время
переходного процесса равно 0.5 с.
0 1 2 3 4 5 6 7
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Рисунок 5.5.2.Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. На основе производных. Ти=0.5с
Переходный график на рисунке 5.5.2 говорит о том, что для системы на базе производных
Постоянная времени Ти=0.5с является малой, и не обеспечивает астатизм.
87
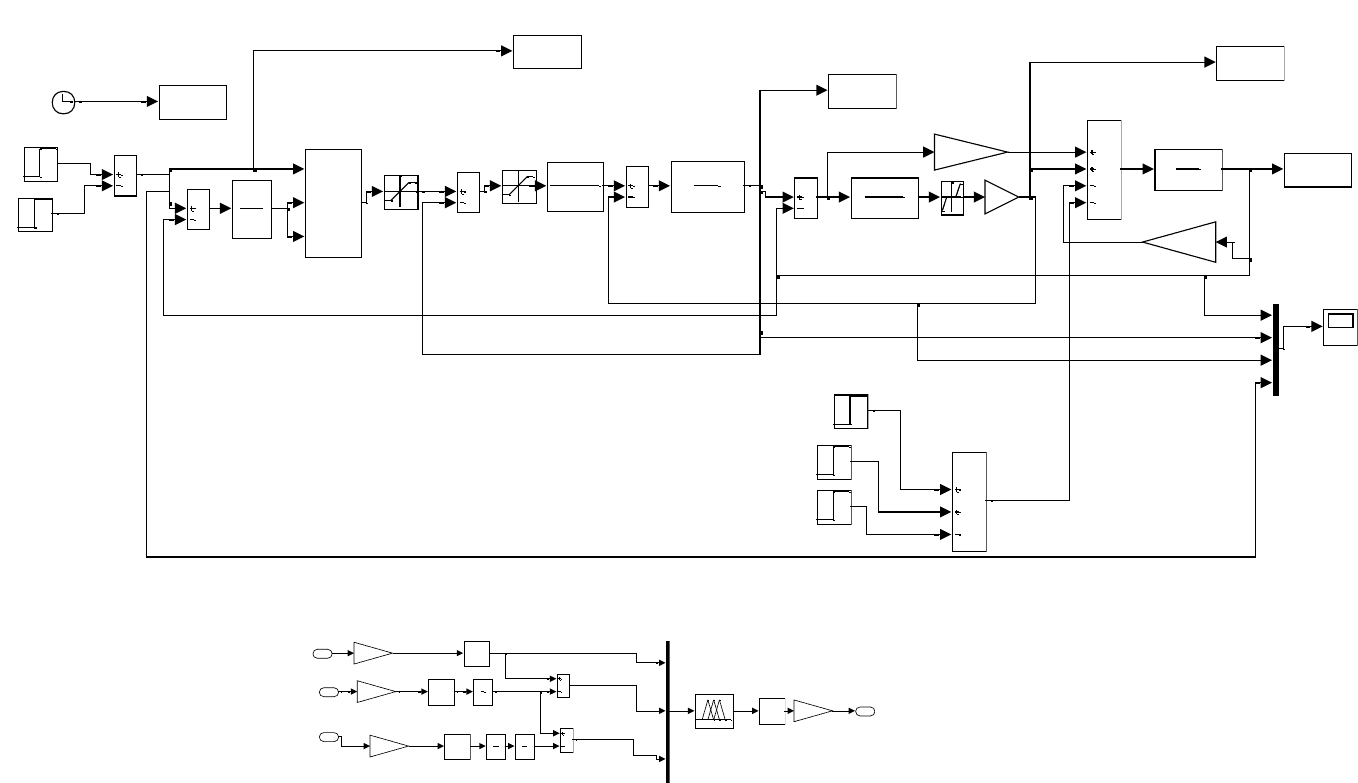
5.5.3 Структурная схема формирования обучающего множества на основе производных
INPUT ANFIS TRAIN
OUT ANFIS TRAIN
1
TL.s
1
Tfider.s
1
Tm.s
3.5
Tsum.s+1
In1
In2
In3
In4
Train Vector
wsoll
To Workspace5
sollen
t
M
w1
w2
-K-
beta1
beta2
Clock
OUT ANFIS VECTOR
INPUT ANFIS MATRIX
d
train vector
z
1
Unit Delay3
z
1
Unit Delay2
z
1
Unit Delay1
1
Gain4
1
Gain3
1
Gain2
1
Gain1
In1Out1
A&D Convertor3
In1Out1
A&D Convertor2
In1Out1
A&D Convertor1
In1Out1
A&D Convertor
4
In4
3
In3
2
In2
1
In1
88
Рисунок 5.5.4 Структурная схема системы с регулятором на основе производных. В рабочей фазе.
1
0.5s
1
TL.s
1
Tfider.s
1
Tm.s
3.5
Tsum.s+1
sollen
t
M
w1
w2
In1
In2
In3
Out1
Subsystem
-K-
beta1
beta2
Clock
INPUT ANFIS MATRIX
1
Out1
z
1
Unit Delay3
z
1
Unit Delay2
z
1
Unit Delay1
3
Gain4
1
Gain3
1
Gain2
1
Gain1
Fuzzy Logic
Controller
In1Out1
A&D Convertor3
In1Out1
A&D Convertor2
In1Out1
A&D Convertor1
In1Out1
A&D Convertor
3
In3
2
In2
1
In1
89
0 1 2 3 4 5 6 7
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Рисунок 5.5.5 Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. На основе производных. Ти=0.2с
При постоянной интегратора, равной 0.2 секунды получаем переходный процесс с
перерегулированием 53% динамические ошибки регулирования достигают значений 12%
0 1 2 3 4 5 6 7
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Рисунок 5.5.6 Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. На основе производных. Ти=0.6с
Увеличение постоянной времени в три раза отразилось только на затягивании
переходного процесса без уменьшения перерегулирования и динамических ошибок.
График переходного процесса представлен на рисунке 5.5.6.
90
0 1 2 3 4 5 6 7
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Рисунок 5.5.7. Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. На основе производных. Ти=0.2с ,
коэфф. К1= 0.01
Однако уменьшить перерегулирование можно путем уменьшения коэффициента усиления
на управляющем входе сети, от старого значения, равного 1, до значения 0.01. Заданное
значение скорости все равно будет отработано за счет накопления сигнала
рассогласования в интеграторе.
Перерегулирование равно 11%.
Динамическая ошибка равна 10 %.
0 1 2 3 4 5 6 7
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Рисунок 5.5.8.Переходный процесс скоростей первой и второй массы в системе с
интегратором + ANFIS. На основе производных. Ти=0.2с ,
коэфф. К1= 0.01 старое значение 1
Кос= 0.6 старое значение 1
За счет уменьшения коэффициента обратной связи в данной схеме от 1 до 0.6 можно
получить нулевое перерегулирование и затягивание времени отработки приложенной
нагрузки.
В целом система на базе производных дает хорошие результаты, но все равно ее нельзя
считать чисто нейро регулятором, так как вопрос выбора постоянной времени интегратора
остался открытым. А без интегратора получить астатический процесс не удалось.