Дипломная работа: Синтез гибридной нейронной сети для управления двухмассовой электромеханической системой с зазором. 2003 г
Подождите немного. Документ загружается.

91
5.6 Регулятор на базе прямой и обратной модели с фильтром на входе
5.6.1 Структурная схема формирования обучающего множества , для системы с прямой
и обратной моделью.
1
TL.s
1
Tfider.s
1
Tm.s
3.5
Tsum.s+1
sollen
t
M
w1
w2
Ramp
1
-K-
beta1
beta2
Clock
In1
In2
Out1
ANFIS Direct1
In1
In2
Out1
ANFIS Direct
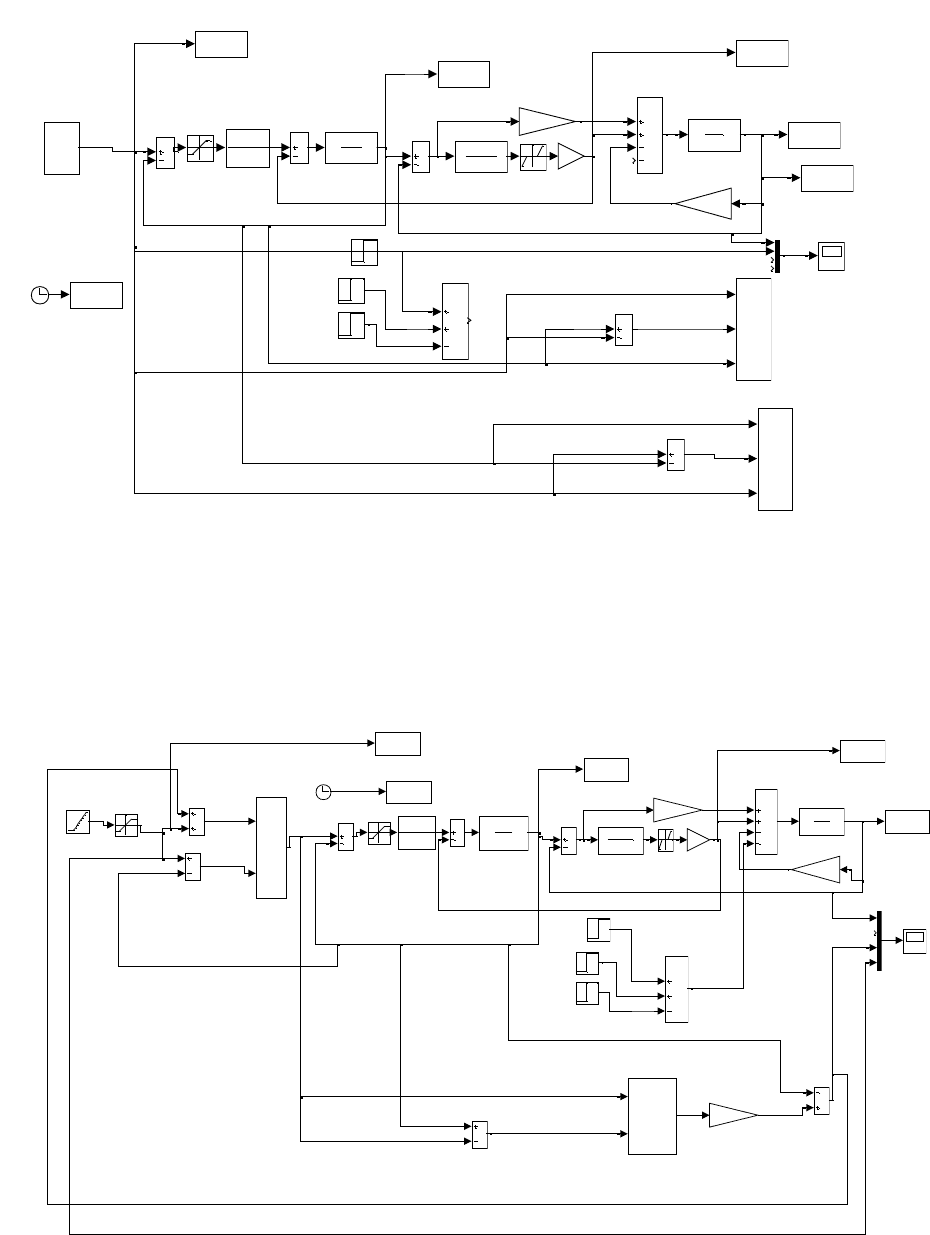
Рисунок 5.6.2.Структурная схема системы с прямой и обратной моделью. Без фильтра.
На рисунках 5.6.1 и 5.6.2 представлены структурные схемы для фазы обучения и фазы
работы, в системе на базе прямой и инверсной модели объектра регулирования.
INPUT ANFIS TRAIN
Out1
random input
1
TL.s
1
Tfider.s
1
Tm.s
3.5
Tsum.s+1
In1
In2
In3
Train Vector
Inverse model
In1
In2
In3
Train Vector
Direkt model
wsoll
To Workspace5
sollen
t
M
w1
w2
-K-
beta1
beta2
Clock
92
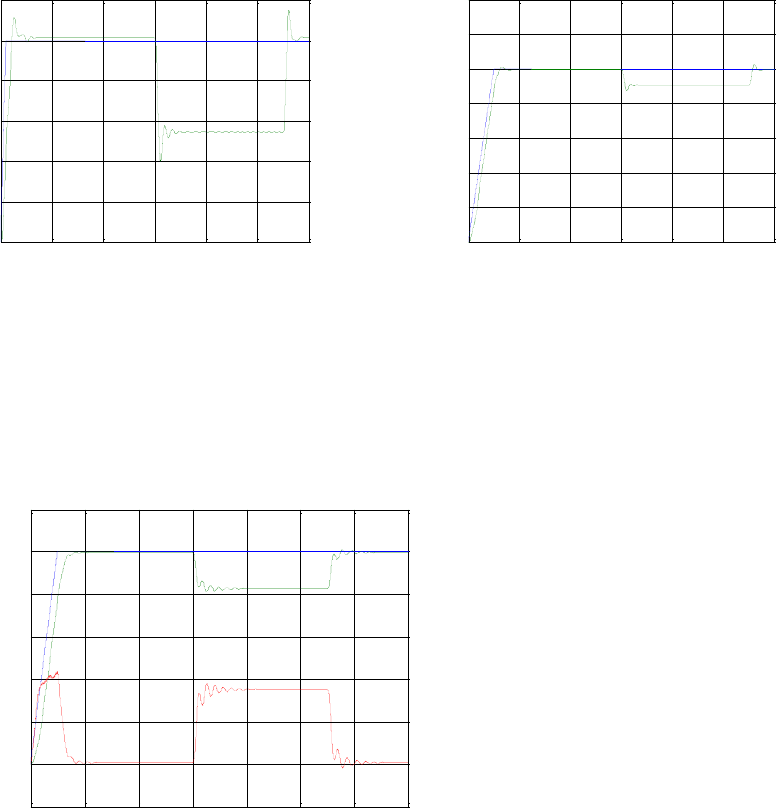
Рисунок 5.6.3. Переходные процессы скорости и задающего сигнала.
На рисунке 5.6.3. представлены переходные процессы с уровнем управляющего сигнала
равного 0.1 и 0.5 номинальной скорости. Не смотря на это, при уровне задания,
перерегулирование составляет 5 %, даже при использовании задатчика интенсивности. А
при значении сигнала управления равном 0.5, перерегулирование равно нулю.
0 1 2 3 4 5 6 7
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Рисунок 5.6.4. график ошибки сети , задающего сигнала и скорости
Из рисунка 5.6.4 видно что корректирующий сигнал повторяет график момента двигателя.
Для получения астатизма скорости, нужно было поменять знак в сумматоре, перед
прямой нейронной моделью. Если знаки сумматора сохранить в том же состоянии
что и при обучении то получится что при приложении нагрузки, сигнал скорости
двигателя
Заставляет выходной сигнал нейронной сети следовать формой скорости
двигателя.
В случае перемены знаков, сигнал разности актуальной скорости двигателя и
восстановленной с помощью нейронной сети повторят форму момента двигателя,
тоесть возрастает – когда к системе приложена нагрузка. Именно в этом случае
сигнал разности реальной и восстановленной скорости двигателя, добавленный к
управляющему сигналу для инверсной сети позволяет получить астатизм.
Такой подход вносит колебания в систему , из-за того что сигнал коррекции зашумлен
мелкими вибрациями, однако эта проблема решается с помощью фильтра, стоящего в
канале передачи корректирующего сигнала.
0 1 2 3 4 5 6
0
0.02
0.04
0.06
0.08
0.1
0.12
0 1 2 3 4 5 6
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
93
0 1 2 3 4 5 6 7
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
M
Wm
Korrect
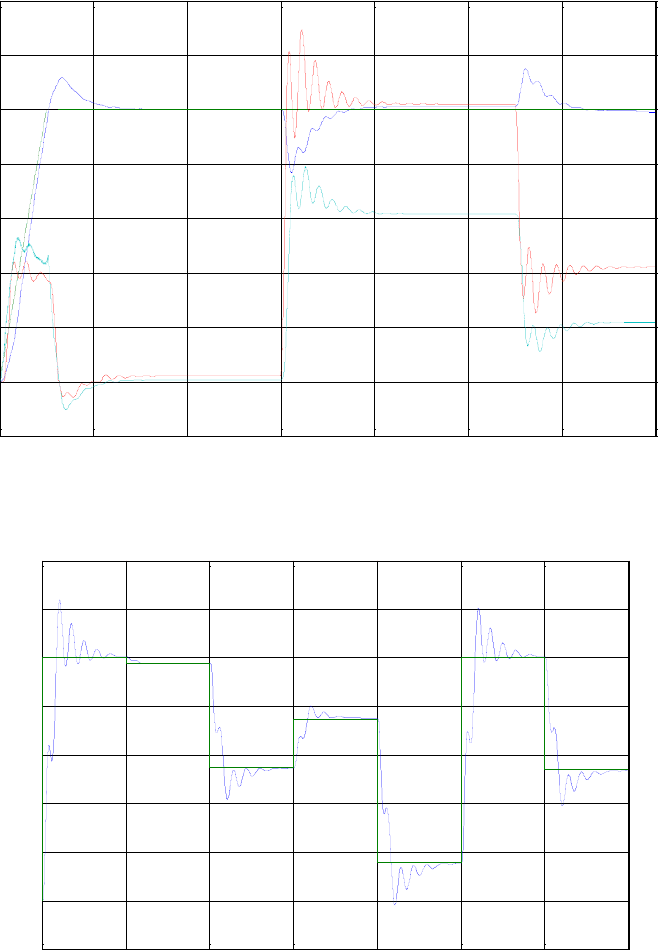
Рисунок 5.6.5 Отработка линейно нарастающего сигнала, и приложение нагрузки
Рисунок. 5.6.6 Отработка случайного ступенчатого сигнала, без нагрузки.
Переходные процессы, представленные на рисунках 5.6.5 и 5.6.6 демонстрируют
способность к отработке переменного сигнала управления, и астатизма по управлению и
возмущению.
0 1 2 3 4 5 6 7
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
94
Out1
random input
1
TL.s
0.3
0.3s+1
1
Tfider.s
1
Tm.s
3.5
Tsum.s+1
danf
sollen
t
M
w1
w2
Ramp1
1
1
1
-K-
beta1
beta2
Clock
In1
In2
Out1
ANFIS inverse
In1
In2
Out1
ANFIS Direct
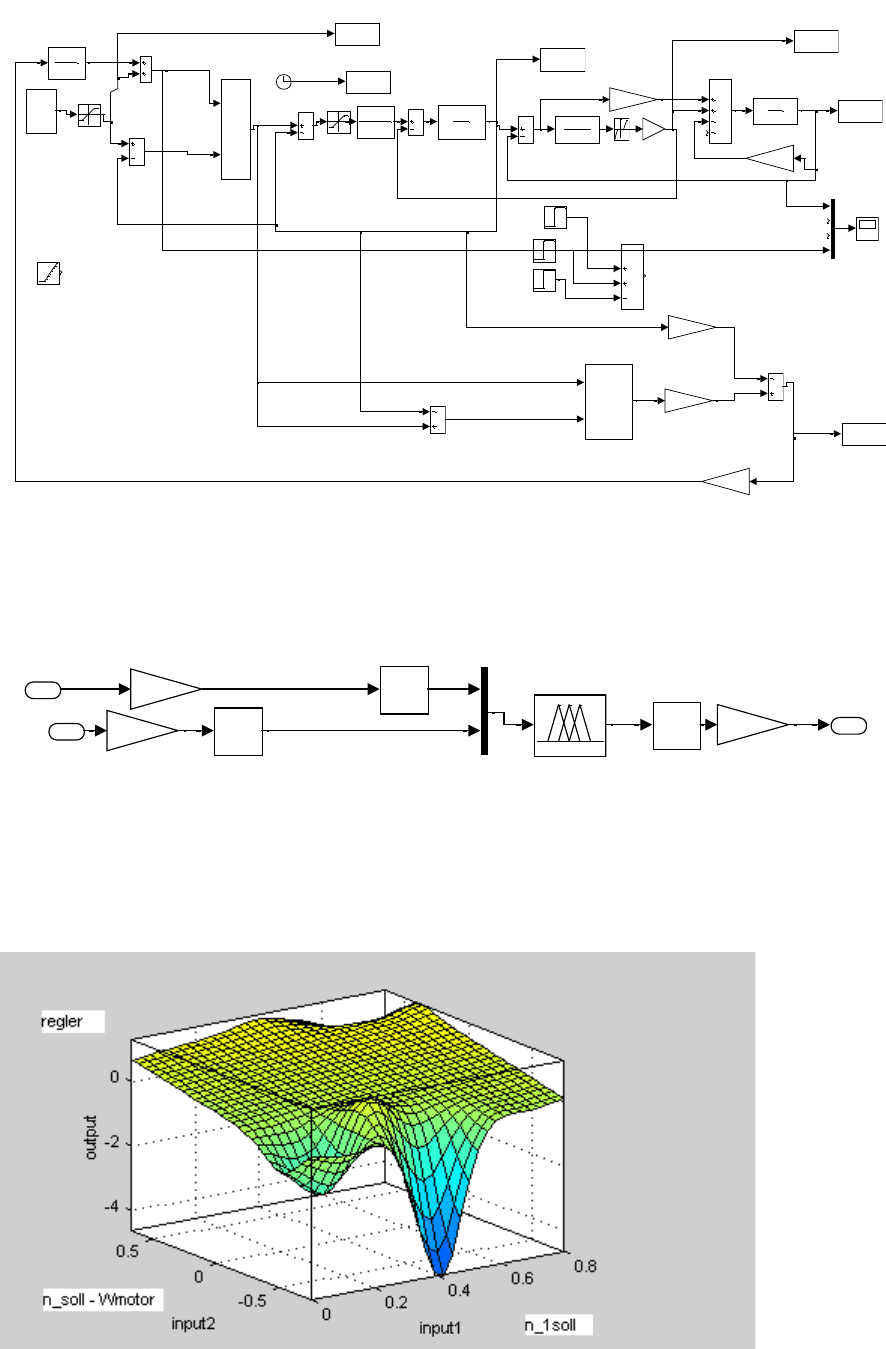
Рисунок 5.6.7 Структурная схема в Матлаб, применение прямой и обратной модели
объекта регулирования.
1
Out1
1
Gain4
1
Gain3
1
Gain1
Fuzzy Logic
Controller
In1Out1
A&D Convertor2
In1Out1
A&D Convertor1
In1Out1
A&D Convertor
2
In2
1
In1
Рисунок 5.6.8 Субсистемы - ANFIS-direct ANFIS-inverse
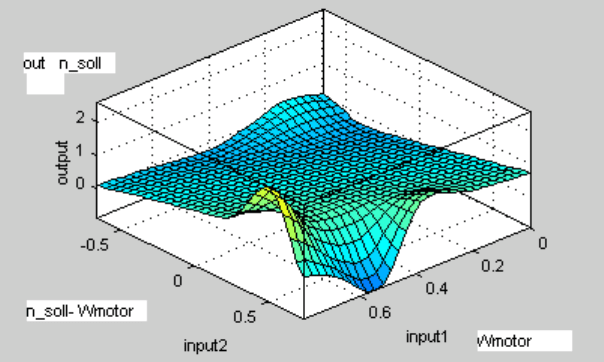
Рисунок 5.6.9 Поверхность регулирования в системе Anfis Direct
95
Рисунок 5.6.10 поверхность регулирования в системе Anfis Inverse
На рисунках 5.6.7 и 5.6.8 изображены структурные схемы системы управления.
Рисунки 5.6.9. и 5.6.10 иллюстрируют сущность нейро фаззи регуляторов, как видно, по
сути каждая такая сеть, имеющая два входа и один выход является поверхностью,
которую легко можно построить средствами пакета Матлаб.
Система с прямой и инверсной моделью позволяет обойтись без интегратора, и без
задержек, путем применения в прямой и инверсной модели разностных сигналов. Таким
образом эта система рассчитывается путем синтеза нейронных сетей, и позволяет
получить астатические переходные процессы с допустимым перерегулированием.
96
6. Экономикическое обоснование дипломной работы
В настоящее время во многих отраслях промышленности существуют машины и
механизмы, которые имеют нелинейный характер нагрузки, гибкую связь первой и второй
масс, и зазор в кинематической схеме механической системы. Примером таких
промышленных механизмов служат привода станков, подъемно-транспортных машин,
колесные пары электровозов и другие машины в механической части которых есть
редукторы и ременные передачи или заметное закручивание вала.
Одной из важных задач, решаемых при проектировании электроприводов машин и
механизмов является обеспечение требуемых показателей регулирования.
В настоящей работе предлагается идея использования нейрофаззи сети в виде
регулятора , для получения заданного качества регулирования без применения ручных
расчетов и построения математической модели объекта, и сокращения времени настройки
системы и пуска в эксплуатацию. Качество переходных процессов достигается
применением нейронной сети как универсального апроксиматора нелинейной
динамической передаточной функции объекта.
Для удобства и упрощения математической модели системы, она приведена к
номинальным параметрам.
Рассмотрены варианты регулирования на основе прямого инверсного управления
(direct inverse control) с сумматором, с интегратором, с вариацией числа входов от 2 до 4,
а так же система регулирования с применением прямой и инверсной модели объекта
регулирования.
Компьютерное моделирование системы было проведено для всех этих случаев, с
целью выявления оптимальной по качеству и простоте архитектуры системы управления.
В системе управления используется только одна обратная связь по скорости первой
массы, это обосновано тем, что измерение скорости не всегда может быть точно
проведено. Например, для случая колесной пары электровоза скорость второй массы
является линейной скоростью перемещения состава, и поддается измерению только с
применением сложных датчиков. Практическая целесообразность этого исследования
естественна, поскольку сокращение числа обратных связей приведет к сокращению
элементов и соединений в схеме, что, в свою очередь, способствует повышению
надежности системы управления и удешевлению всей системы управления. Кроме того,
измерение отдельных координат электропривода, например, упругого момента, сопряжено
с определенными сложностями.
Целью настоящей работы является исследование возможностей нейрофаззи сети для
управления нелинейными динамическими объектами, на примере двух массовой
электромеханической системы с зазором .
Было исследовано влияние изменения параметров нейронной сети и объекта
регулирования на качество переходного процесса, на управляемость системой, на
быстродействие, на ее устойчивость.
В процессе исследования было рассмотрено влияние следующих факторов:
а) архитектура сети (число входов, вид функций активации, вид системы вывода,
метод обучения ).
б) схема обучения и использования нейронной сети(direct inverse control), схема с
прямой и обратной моделью.
в) схема подавления статической ошибки управления: применение сумматоров и
интеграторов.
г) влияние коэффициентов на входе и выходе регулятора на вид переходного
процесса.
97
Компьютерное моделирование нейросетевой системы управления подтвердило
справедливость полученных теоретических результатов для двухмассовой ЭМС с
синтезированным нейрофаззи регулятором.
В практическом плане, такие нейрорегуляторы могут быть использованы для ЭП
машин и механизмов с фрикционной нагрузкой, нелинейностями электромеханических
преобразований в двигателе и механических передачах.
6.1 Расчет общих затрат на научно-исследовательскую работу
Затраты на НИР определяем по формуле:
З
нир
=З
о
+З
д
+О
см
+Н+П; (6.1)
где З
о
– основная заработная плата, грн;
З
д
– дополнительная заработная плата, грн;
О
см
– отчисления на социальные мероприятия, грн;
Н – накладные расходы, грн;
П- величина прибыли, грн.
Расчет основной заработной платы:
З
о
=
ТЗ
ni
1i
иi
; (6.2)
где Т- период разработки, мес.;
З
иi
– месячная зароботная плата I- го исполнителя за месяц, грн;
n- количество исполнителей.
Величину месячной заработной платы принимаем: для руководителя разработки- 600
грн, для инженера – 400грн.
З
о
=
300040036003ТЗ
2i
1i
иi
,грн;
Величину дополнительной зароботной платы принимаем в размере 10% от суммы
основной заработной платы:
З
д
=З
о
10%=
300%103000
,грн.
(6.3)
Отчисления на социальные мероприятия составляют 38,5% от суммы основной и
дополнительной зароботной платы:
О
см
= 38,5%(З
о
+З
д
)= 38,5%(3000+300)= 1270,50 ,грн. (6.4)
Величину накладных расходов принимаем в размере 80% от основной заработной
платы:
Н= 80% З
о
=
2400%803000
,грн.
(6.5)
98
В затратах на НИР учитываем величину прибыли, которую определятся в процентах
от суммы приведенных затрат по НИР:
П=
%30
З
нир
=
15,209150,6970%30
,грн. (6.6)
Определяем затраты на НИР по формуле (5.1):
З
нир
=3000+300+1270,50+2400,00+2091,15=9061,65,грн. (6.7)
6.2 Построение линейного графика работ по НИР
Перечень работ по проведению исследовательской работы приведен в таблице 6.1.
Таблица 6.1- Перечень работ при проведении НИР
Код работы
Наименование
Длительность
работ
1
2
3
0-1
Постановка задачи с учетом существующей проблемы
возникновения управления нелинейными объектами
5
1-2
Обзор существующей литературы
10
2-3
Выбор схемы системы управления
5
2-4
Построение математической модели двух массового ЭП с
зазором и исследование ее на адекватность реальным
стендовым переходным процессам
15
3-5
Изучение пакета Матлаб, применительно к нейрофаззи
сетям ANFIS
10
5-6
Построение обратной модели объекта и эксперименты по
использованию инверсной модели в прямом канале
управления нелинейного объекта регулирования
15
6-7
Исследование влияния на качество переходных процессов
структуры нейронной сети, вида активационных функций
входных нейронов, параметров вывода, искусственных
коэффициентов на входе и выходе регулятора, алгоритма
обучения нейронной сети
3
6-8
Подбор обучающего вектора для построения адекватного
отображения объекта с помощью нейронной сети
10
8-9
Разработка программного обеспечения на языке Матлаб с
целью получения обученной нейронной сети с помощью
открытого алгоритма.
10
9-11
Изучение языка программирования Borland 3.1 С++
20
10-11
Разработка программного обеспечения на языке С++ для
исследования работы нейронного регулятора на реальном
стенде с цифровым сигнальным процессором DS1102
20
11-12
Исследование применения сумматоров для уменьшения
ошибки обучения сети и увеличения точности работы
системы управления
5
12-13
Исследование применения интеграторов для подавления
статической ошибки регулирования и увеличения точности
работы системы управления
25

99
13-14
Исследование комбинированного применения сумматора и
интегратора в схеме прямого инверсного управления
10
14-15
Разработка и исследование работы схемы с применением
прямой и инверсной модели объекта регулирования
10
15-16
Проведение физического эксперимента
10
16-17
Оформление дипломного проекта.
15
На рисунке 6.1 построен линейный график работ по НИР. В соответствии с
линейным графиком длительность НИР составляет 132 дня.
6.3 Экономическое обоснование целесообразности применения нейронных сетей
для управления нелинейными электромеханическими системами
Многие современные электропривода представляют собой нелинейные
электромеханические системы, многие из которых не имеют строгого математического
описания, или нет возможности построить точную математическую модель.
Математическое описание является необходимым условием построения регуляторов
классическими методами, однако нейронные регуляторы принципиально не требуют
математической модели, поскольку регулятор настраивается на основе тестовых значений
координат электропривода, которые можно получить из простейших опытов.
Рассматривая современные электромеханические системы можно сделать вывод о
том, что большинство из них имеют существенные нелинейности, и классические
регуляторы, рассчитанные для них работают с допущениями о линейности объекта
регулирования в определенных условиях работы. Предлагаемый регулятор позволяет
отказаться от точного математического описания объекта регулирования, и вместе с тем
учесть влияние характерных нелинейностей привода, путем их принудительной
линеаризации нейрофаззи сетью.
Применение данного регулятора позволяет сделать исходно колебательный процесс
устойчивым, уменьшить перерегулирование и величины пиковых моментов и токов, что
увеличивает срок службы привода за счет устранения аномальных режимов работы.
Известно, что уменьшение величины действующего напряжения, превышающего
предел выносливости при симметричном цикле на 20% увеличивает срок службы в 2-10
раза, следовательно, даже незначительное снижение динамической составляющей
момента упругости может существенно увеличить срок службы и длину межремонтного
цикла и, следовательно, улучшить технико-экономические показатели работы механизма
в целом.
В процессе обслуживания одного прокатного стана задействовано 8 механиков.
Заработная плата каждого механика составляет 400грн. Следовательно, за год суммарная
заработная плата по формуле 5.2 составит
З
м
=
38400128400
,грн.
При внедрении нейросетевой системы число механиков сократится до одного. Т.о.
в восемь раз уменьшатся затраты на заработную плату.
Экономия за год зароботной платы составит 33600 грн.
Время окупаемости средств на внедрение нейросетевой системы управления Т
ок
расчитывается по формуле:

100
Т
ок
=
м
нир
З
З
, (6.8)
Затраты на разработку нейросетевой системы управления составляют 9061,65грн.
Т
ок
=
27.0
33600
65,9061
, года.
Следовательно, средства, затраченные на НИР, окупятся через 4 месяца.
Т.о. работа по повышению эффективности подавления колебаний и упрощению
обслуживания, пуска и наладки приводов является весьма актуальной.