Дипломная работа - Синтез алгоритмов управления тепловым режимом
Подождите немного. Документ загружается.

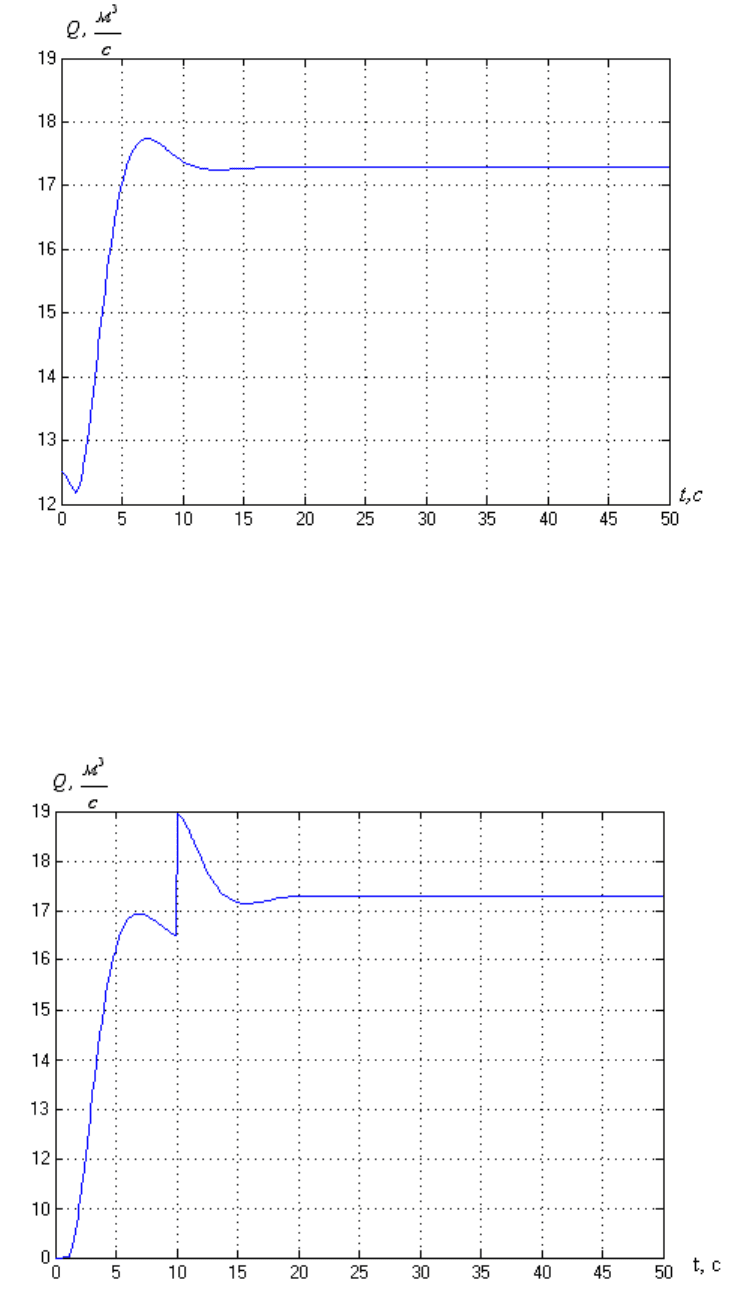
Рис.3.3. Переходный процесс в замкнутой системе без регулятора при постоянном
возмущающем воздействии
При переменном возмущающем воздействии график переходного
процесса представлен на рис. 3.4:
Рис.3.4. Переходный процесс в замкнутой системе без регулятора с переменным
возмущающим воздействием
53
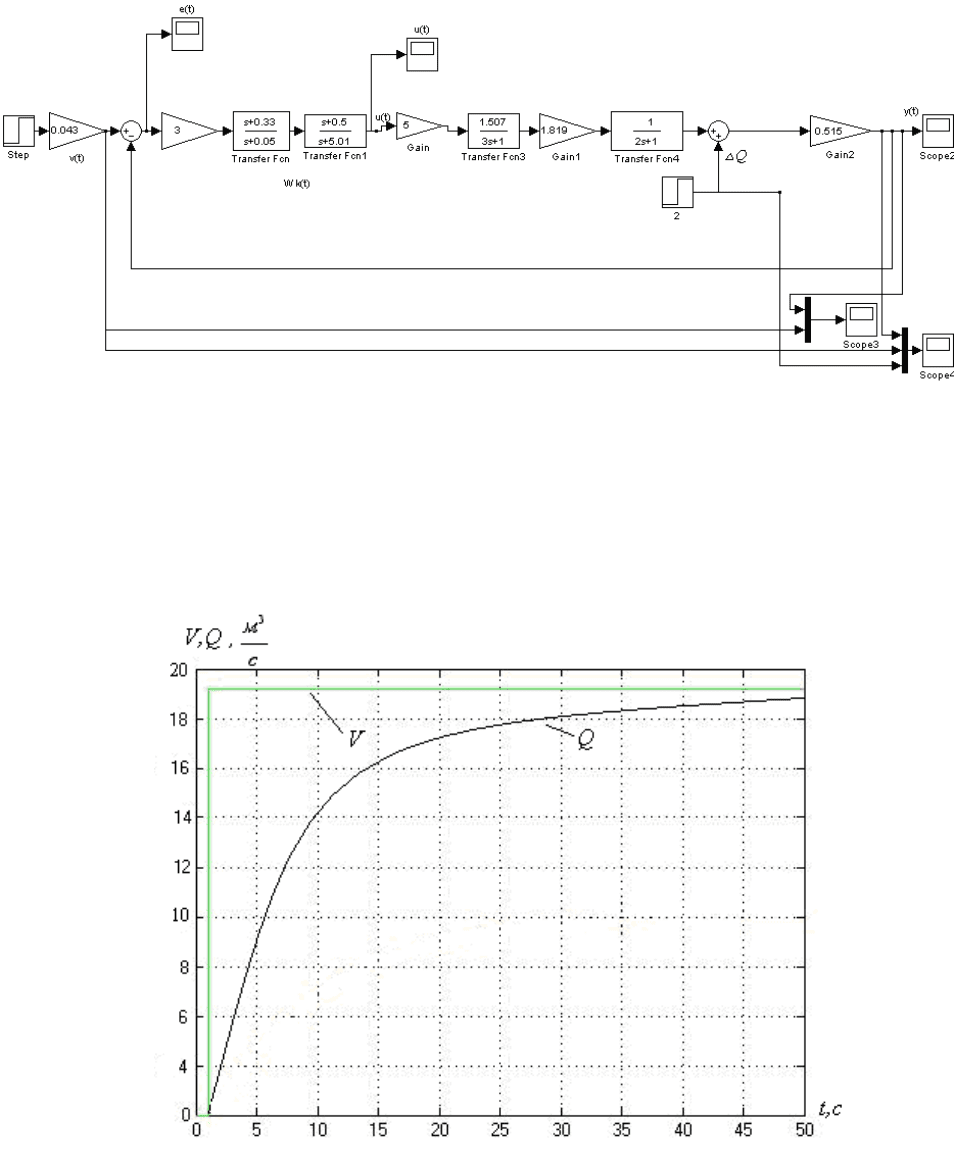
Рис. 3.5 Структурная схема замкнутой системы с регулятором
Результаты моделирования:
Рис.3.6. Переходный процесс в замкнутой системе с регулятором
54
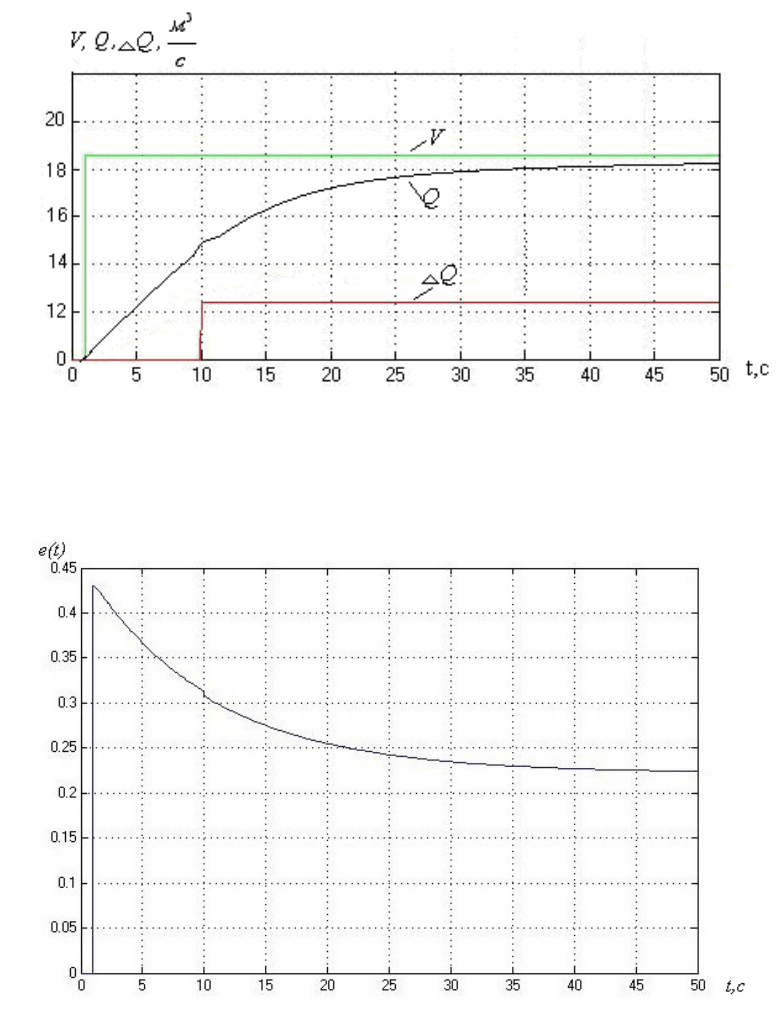
Рис. 3.7 Переходный процесс в замкнутой системе с возмущающим воздействием,
обусловленным поршневым эффектом.
Рис.3.8 Статическая ошибка в системе
55
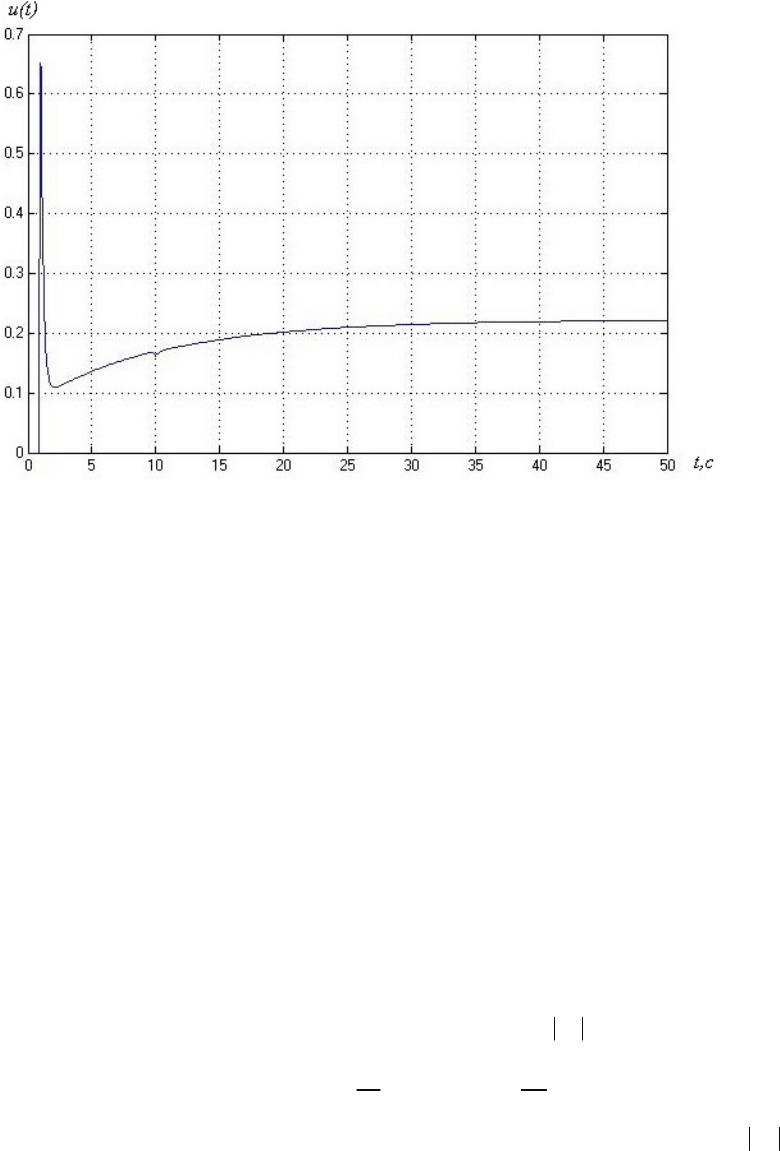
Рис.3.9 Управляющее воздействие
Из рисунков видно, что переходный процесс в замкнутой системе
соответствует заданным требованиям.
3.1.5. Построение ЛАЧХ объекта для астатической системы
Асимптотическая ЛАЧХ звена второго порядка при d=1.0246 имеет два
«излома» на частотах ω
1
=1/T
1
= 0.33, ω
2
=1/T
2
= 0.5
Объект управления представляет собой последовательную цепочку
типовых звеньев (два апериодических звена), поэтому
)(
0
L
можно
представить, суммируя ЛАЧХ отдельных звеньев. При этом будет
производиться следующая процедура построения
)(
0
L
:
– на частоте ω = 1 фиксируем точку с амплитудой
97.16lg20
0
k
дБ;
– отмечается частота сопряжения
33.0
1
1
1
T
;
5.0
1
2
2
T
– до частоты сопряжения ω
1
строится низкочастотная асимптота
0
lg20 k
,
проходящая через точку L=16.97 дБ под наклоном -20 дБ, далее происходит
излом и до частоты ω
2
асимптотическая ЛАЧХ строится под наклоном -40 дБ/
дек.;
–на частоте сопряжения ω
2
происходит излом асимптотической ЛАЧХ
объекта. Асимптота проводится под наклоном -60 дБ/дек.
56
3.1.6. Построение желаемой ЛАЧХ
Желаемая ЛАЧХ строится по требованиям к качеству работы
замкнутой системы в статике и динамике. Для удобства построения ЛАЧХ
регулятора предлагается выровнять ЛАЧХ объекта и желаемую ЛАЧХ. При
этом строится измененная характеристика объекта с учетом коэффициента
регулятора (k
р
), найденного из условий статики:
).()(
~
00
LkL
р
(3.6)
Это позволяет при построении желаемой ЛАЧХ ориентироваться
только на требования динамики (
секt
П
10%;5
).
Наибольшее влияние на свойства замкнутой системы оказывает средне
частотная асимптота желаемой ЛАЧХ, которую выбирают по условиям
динамики. Для того, чтобы обеспечить требуемые свойства, ее наклон всегда
должен быть равен -20 дБ/дек.
Частота среза
C
выбирается по заданному быстродействию
замкнутой системы:
.
5
;)9,06,0(
П
ППC
t
;.)413,1942,0(57,1)9,06,0(
;)9,06,0(
57,1
10
5
1
1
с
с
ПC
П
Выберем ω
с
= 1 с
-1
, lg ω
с
=lg1=0 дек.
Длина среднечастотного участка желаемой ЛАЧХ ограничивается
запасом устойчивости по модулю
16L
дБ, который откладывается вверх и
вниз по оси ординат (
L
находим по номограммам в зависимости от
требуемого перерегулирования).
В области низких частот желаемая ЛАЧХ совпадает с ЛАЧХ объекта; в
области высоких частот эти две характеристики параллельны.
Для удобства построения ЛАЧХ регулятора предлагается выровнять
ЛАЧХ объекта и желаемую ЛАЧХ. При этом строится измененная
характеристика объекта с учетом коэффициента регулятора (k
р
), найденного
из условий статики:
).()(
~
00
LkL
р
(3.7)
57
Для расчета
р
k
, задается относительная ошибка по ускорению
05.0
уск
. И из выражения
0
1
1
kk
р
уск
(3.8)
определяется значение
3
р
k
.
3.1.7. Расчет корректирующего звена
Асимптотическая ЛАЧХ корректирующего звена определяется в
соответствии с основным соотношением частотного метода:
).()()(
0
LLL
ЖК
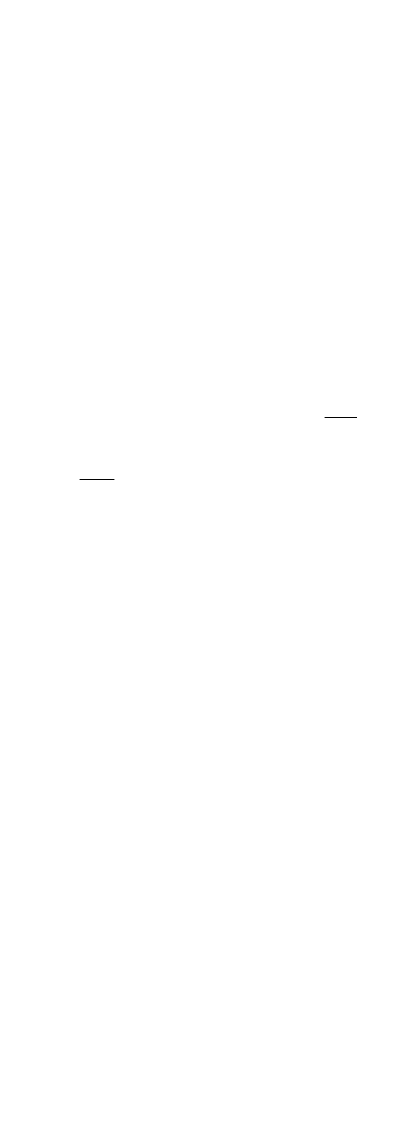
ЛАЧХ объекта, регулятора и желаемая ЛАЧХ приведены на рис.3.10
Рис.3.10. Логарифмические амлитудно - частотные характеристики
Затем по
)(
К
L
находится передаточная функция
)(
К
W
с помощью
процедуры, обратной по отношению к порядку построения ЛАЧХ объекта
.
)11413.0)(184.39(
)1027.3)(12)(1013.5(3
)(
2
pp
ppp
W
К
(3.9)
58
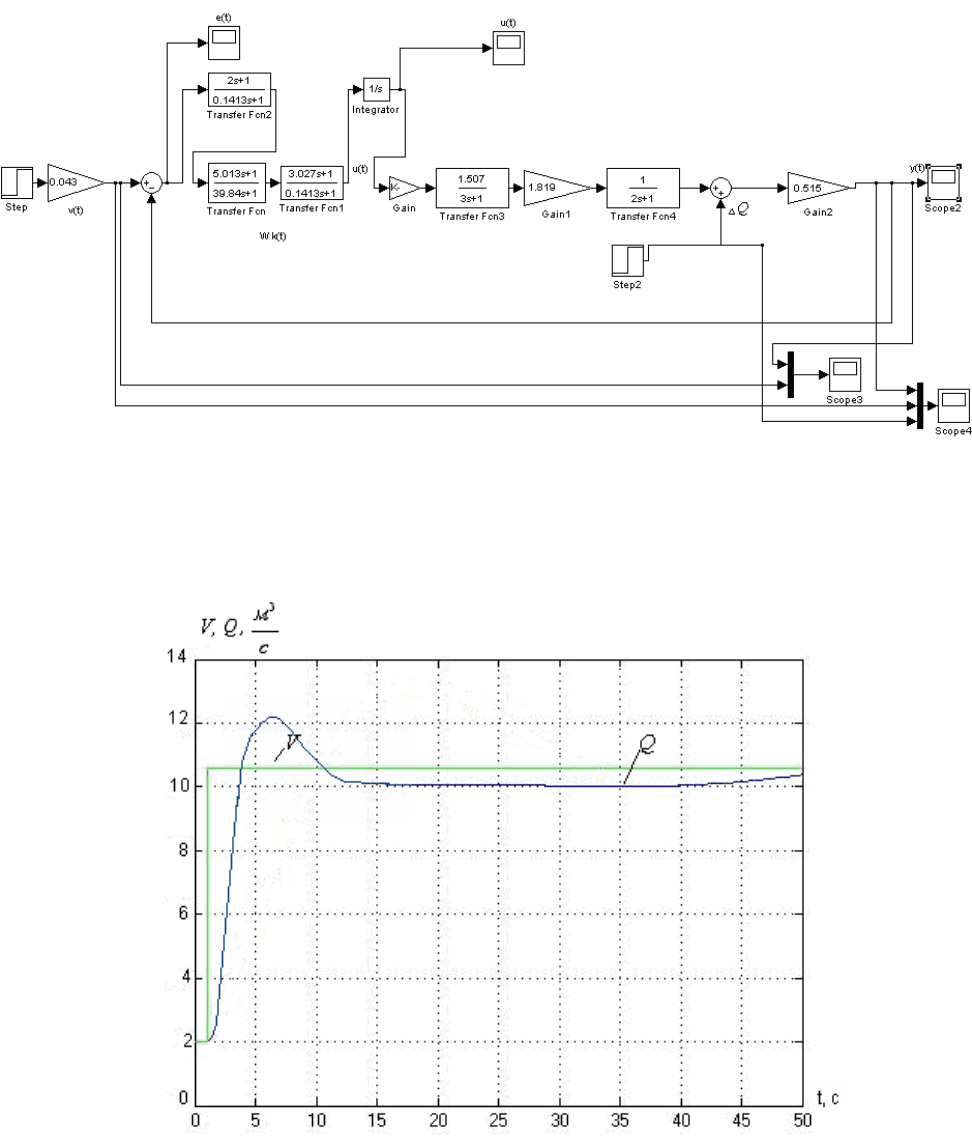
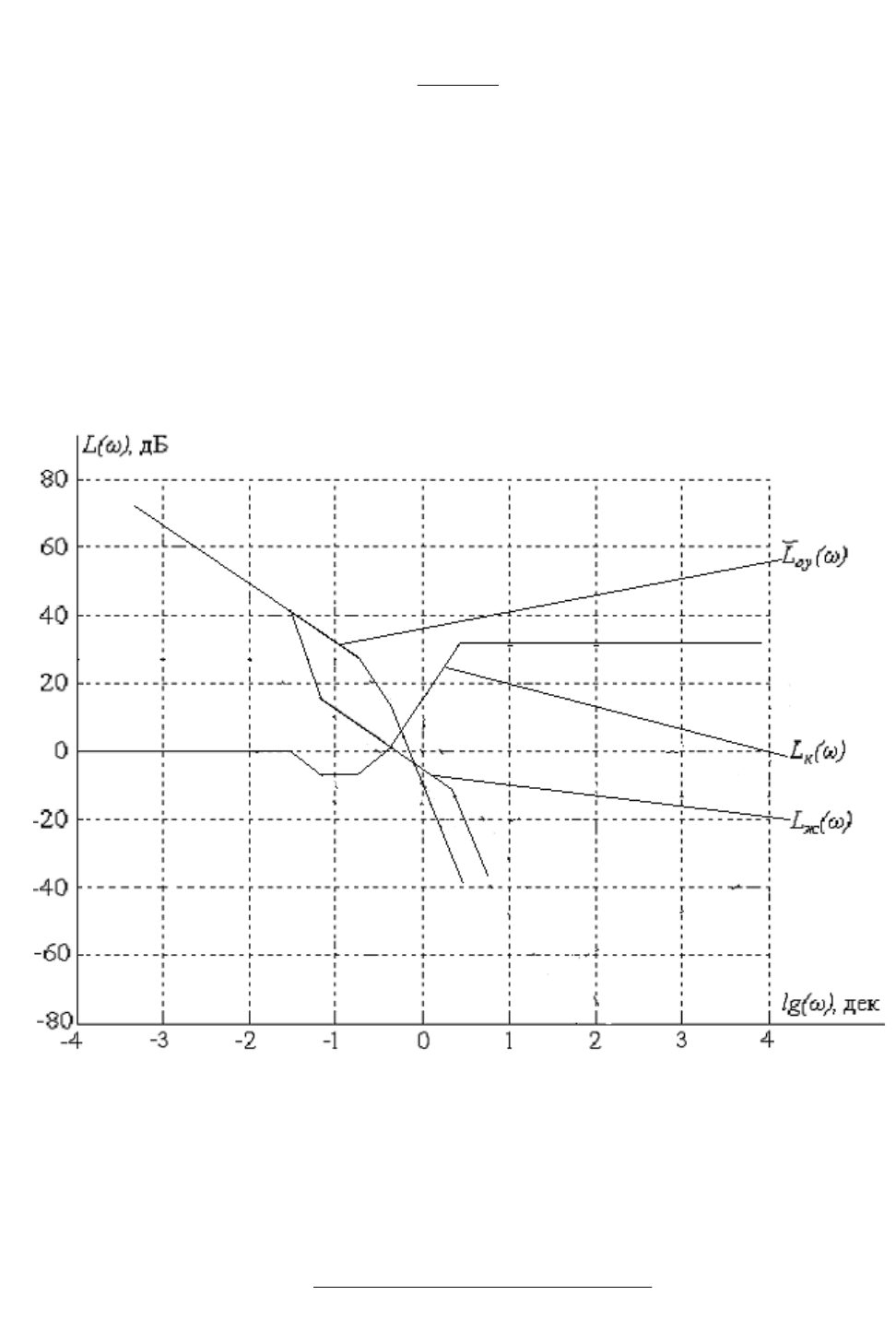
Рис. 3.11 Структурная схема замкнутой системы с регулятором
Результаты моделирования:
Рис.3.12 Переходный процесс в замкнутой системе с регулятором
59
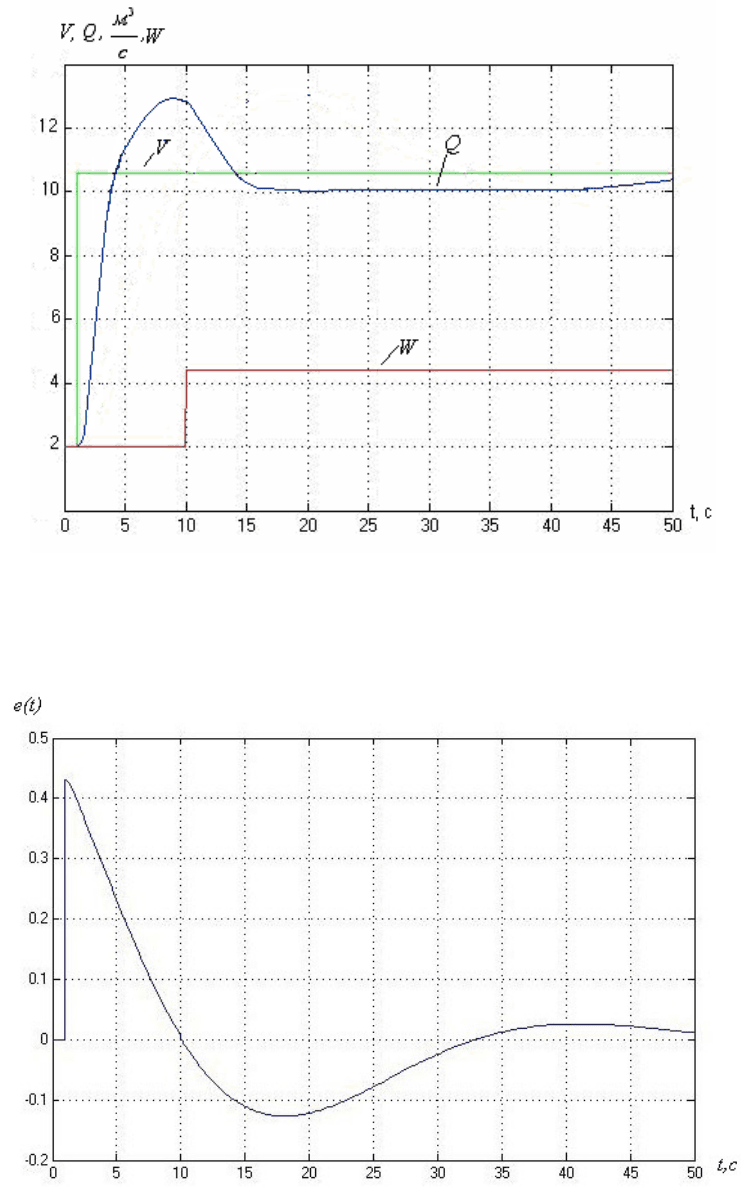
Рис. 3.13 Переходный процесс в замкнутой системе с возмущающим воздействием,
обусловленным поршневым эффектом
Рис.3.14 Ошибка в астатической системе
Из рис. 3.14 видно, что скоростная ошибка стремится к нулю по
прошествии некоторого времени.
60
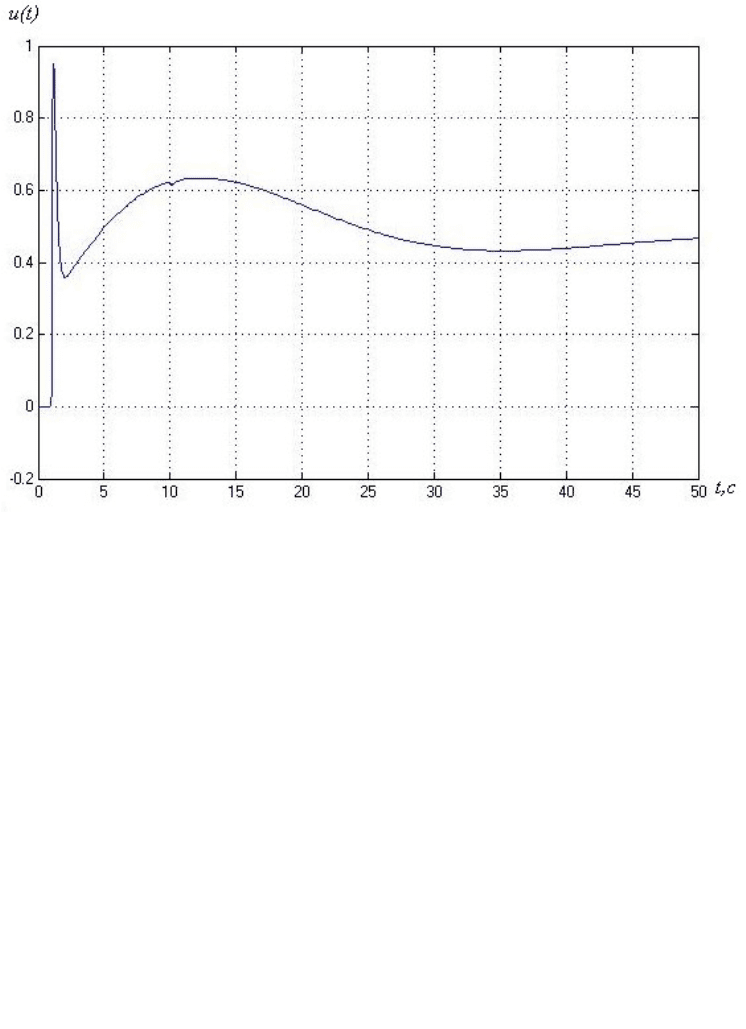
Рис.3.15 Управляющее воздействие
3.2. Расчет регулятора САУ УШ
3.2.1. Постановка задачи синтеза регулятора САУ УШ
Целью функционирования синтезируемой системы управления
является поддержание необходимого расхода воздуха в тоннеле
метрополитена.
Требования, предъявляемые к качеству переходных процессов:
0
70
0%
0%
п
t с
(3.10)
Необходимо определить структуру и параметры регулятора,
обеспечивающего требования статики и динамики при действии возмущения
и помехи измерения величины расхода воздуха.
Из анализа математической модели данной системы, следует, что
основным звеном, вырабатывающим сигнал управления, является реле. Эта
особенность приводит к необходимости применения релейного закона
управления объектом. Из-за неполной информации о модели объекта и
действующих возмущениях решать задачу как задачу оптимального
61

быстродействия затруднительно. Поэтому, синтез системы управления
можно осуществить на основе организации скользящего режима, так как в
этом случае вид переходного процесса зависит только от вида многообразия
и не зависит от параметров объекта и возмущений. Основная идея синтеза
состоит в следующем: обеспечивается желаемое движение в скользящем
режиме за счет соответствующего выбора поверхности разрыва в
пространстве состояния объекта управления, а затем управление выбирается
таким образом, чтобы скользящие режимы по пересечению поверхностей
разрыва были устойчивы, то есть траектории, начинающиеся на этом
многообразии, уже не покидали бы его [12].
3.2.2. Формирование поверхности переключения
При синтезе системы со скользящим режимом математическую модель
объекта управления необходимо представить в переменных состояниях
(форме Коши). Имеем следующую систему:
1 2
2
1
( , )
.
у
x x
x f t x bU
y x
,
где
2
1
),( x
T
xtf
A
,
m УШ A Д
А
K K K K
b
T
.
Формируем желаемое дифференциальное уравнение на единицу
меньшего порядка, чем уравнение объекта:
VcycVyFy
11
),(
(3.11)
В статическом режиме y=V в силу свойств решения уравнения (3.11),
где V – заданное входное воздействие на систему.
Параметр
1
c
выбирается исходя из требований на время переходного
процесса (3.10):
1 1
3
0.043
п
с c
t
с
-1
. (3.12)
62