Дипломная работа - Проектирование автоматизированной системы управления процессом измельчения сульфидной руды
Подождите немного. Документ загружается.

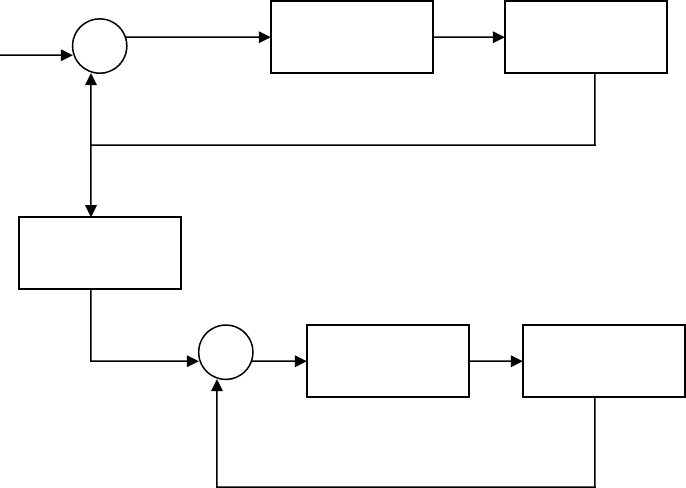
где SP1 – сумма значений исходного питания и песков;
SP2 – вычисленное значение уставки объёма воды, в соответствии с
формулой 1;
LMN1 – управляющее воздействие на частотный преобразователь;
LMN2 – управляющее воздействие на клапан загрузки воды;
PV1 – фактическое значение показаний конвейерных весов;
PV2 – фактическое значение показаний расхода воды на загрузку;
Рисунок 2.11 - Функциональная схема контура стабилизации питания.
б) Контур стабилизации плотности слива классификатора.
Состав контура:
- пневматический клапан с электропневматическим позиционером
«SAMSON» - для регулирования объема воды с целью стабилизации
плотности слива классификатора;
- трехходовой пневматический клапан с электропневматическим
позиционером «SAMSON» - для стабилизации количество воды,
подаваемой в подрешеточное пространство отсадочной машины;
- магнито-индукционный расходомер «Promag 50W» - для получения
сигнала о количестве воды, подаваемой в подрешетное пространство;
- плотномер на сливе классификатора для получения сигнала плотности
слива классификатора;
Описание работы контура стабилизации плотности слива классификатора:
Регулирующий клапан подачи воды в отсадочную машину и в
разгрузку мельницы регулирует плотность слива классификатора путем
ПИД-
регулятор 1
Процесс
Формула 1
ПИД-
регулятор 1
Процесс
SP2
PV2
PV1
LMN2
LMN1
SP1
31
изменения подачи общей воды. Для стабилизации работы отсадочной
машины при изменении расхода воды при стабилизации плотности слива
классификатора в месте подачи воды в отсадочную машину и разгрузку
мельницы установлен трехходовой клапан, который поддерживает
постоянный расход воды в подрешеточное пространство отсадочной машины
по данным расходомера, установленного на входе воды в отсадочную
машину. Такая схема позволяет исключить взаимное влияние расхода воды в
отсадочную машину и в разгрузку мельницы на регулирование плотности
слива классификатора. Функциональная схема контура стабилизации
питания показана на рисунке 2.12
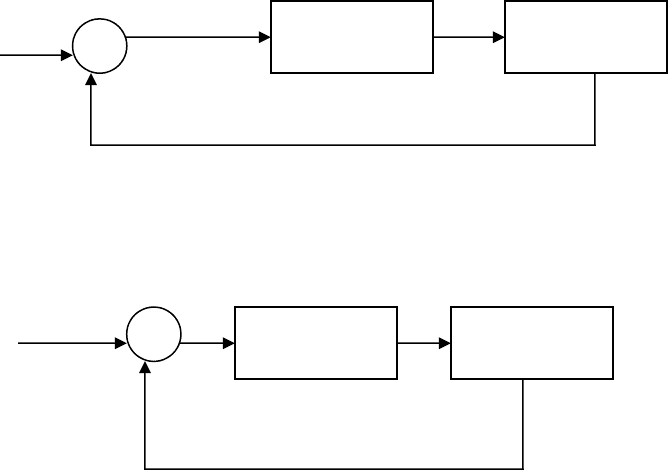
где SP1 – задание-уставка величины плотности слива классификатора
(пульпы);
SP2 – задание-уставка величины открытия трёхходового клапана;
LMN1 – управляющее воздействие на клапан разгрузки воды;
LMN2 – управляющее воздействие на открытие трёхходового клапана;
PV1 – фактическое значение показаний плотности пульпы;
PV2 – фактическое значение показаний расхода воды под отсадочную
машину;
Рисунок 2.12 - Функциональная схема контура стабилизации плотности
слива классификатора.
ПИД-
регулятор 1
Процесс
ПИД-
регулятор 1
Процесс
SP2
PV2
PV1
LMN2
LMN1
SP1
32
2.4 Контроллерное оборудование
В настоящее время автоматизация любых производственных процессов
выполняется на базе универсальных микропроцессорных контроллерных
средств - программируемых логических контроллеров (ПЛК). На вход ПЛК
от датчиков поступают измеренные значения величин, характеризующих
производственный процесс. Контроллеры реализуют заданные функции
контроля, учета, регулирования, последовательного логического управления
и выдают результаты на экран дисплея рабочей станции оператора и
управляющие воздействия на исполнительные механизмы объекта
автоматизации.
В качестве дисплейных рабочих станций почти всегда используются
персональные компьютеры в обычном или промышленном исполнении;
большей частью с двумя типами клавиатур: традиционной алфавитно-
цифровой и специальной функциональной и оснащенные одним или
несколькими мониторами с большими экранами.
SIMATIC S7-300 - это модульный программируемый контроллер
фирмы SIEMENS, предназначенный для построения систем автоматизации
низкой и средней степени сложности.
Модульная конструкция, работа с естественным охлаждением,
возможность применения структур локального и распределенного ввода-
вывода, широкие коммуникационные возможности, множество функций,
поддерживаемых на уровне операционной системы, удобство эксплуатации и
обслуживания обеспечивают возможность получения рентабельных решений
для построения систем автоматического управления в различных областях
промышленного производства.
Эффективному применению контроллеров способствует возможность
использования нескольких типов центральных процессоров различной
производительности, наличие широкой гаммы модулей ввода-вывода
дискретных и аналоговых сигналов, функциональных модулей и
коммуникационных процессоров.
Контроллеры SIMATIC S7-300 имеют модульную конструкцию и могут
включать в свой состав:
- модуль центрального процессора (CPU), в зависимости от степени
сложности решаемой задачи в контроллерах могут быть использованы
различные типы центральных процессоров, отличающихся
производительностью, объемом памяти, наличием или отсутствием
встроенных входов-выходов и специальных функций, количеством и
видом встроенных коммуникационных интерфейсов и т.д;
- модули блоков питания (PS), обеспечивающие возможность питания
контроллера от сети переменного тока напряжением 120/230В или от
источника постоянного тока напряжением 24/48/60/110В;
33
- сигнальные модули (SM), предназначенные для ввода-вывода
дискретных и аналоговых сигналов с различными электрическими и
временными параметрами;
- коммуникационные процессоры (CP) для подключения к сетям
PROFIBUS, Industrial Ethernet, AS-Interface или организации связи по
PtP (point to point) интерфейсу;
- функциональные модули (FM), способные самостоятельно решать
задачи автоматического регулирования, позиционирования, обработки
сигналов, модули снабжены встроенным микропроцессором и
способны выполнять возложенные на них функции даже в случае
отказа центрального процессора ПЛК;
- интерфейсные модули (IM), обеспечивающие возможность
подключения к базовому блоку (стойка с CPU) стоек расширения
ввода-вывода, контроллеры SIMATIC S7-300 позволяют использовать в
своем составе до 32 сигнальных и функциональных модулей, а также
коммуникационных процессоров, распределенных по 4 монтажным
стойкам, все модули работают с естественным охлаждением.
Конструкция контроллера отличается высокой гибкостью и удобством
обслуживания:
- все модули легко устанавливаются на профильную рейку DIN и
фиксируются на установленных местах винтом;
- во все модули (кроме модулей блоков питания) встроены участки
внутренней шины контроллера, соединение этих участков выполняется
шинными соединителями, устанавливаемыми на тыльной стороне
корпуса;
- наличие фронтальных соединителей, позволяющих производить замену
модулей без демонтажа всех внешних соединений и упрощающих
выполнение операций подключения внешних цепей модулей;
- подключение внешних цепей через фронтальные соединители с
контактами по винт или пружинными контактами, механическое
кодирование фронтальных соединителей, исключающее возможность
возникновения ошибок при замене модулей;
- применение модульных и гибких соединителей SITOP TOP Connect,
существенно упрощающих монтаж шкафов управления;
- единая для всех модулей глубина установки, все кабели располагаются
в монтажных каналах модулей и закрываются защитными дверцами;
- произвольный порядок размещения модулей в монтажных стойках,
фиксированные места должны занимать только блоки питания,
центральные процессоры и интерфейсные модули.
34
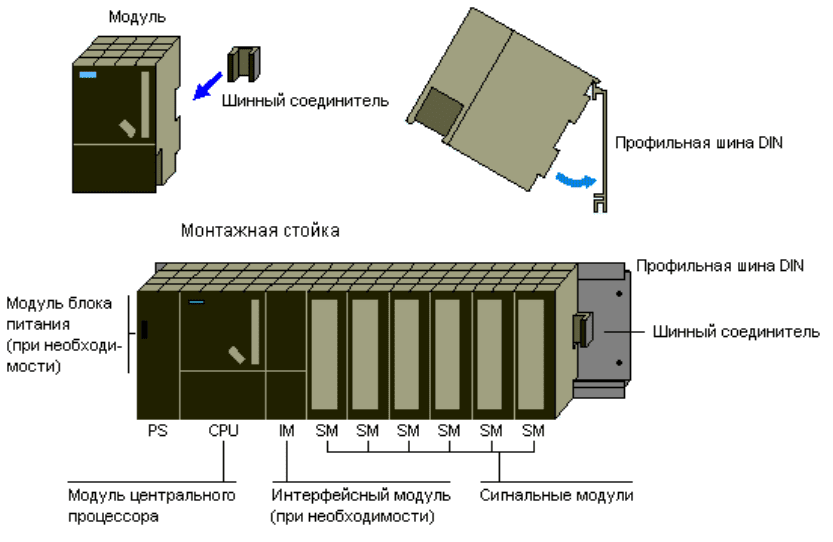
Рисунок 2.13 – Монтажная стойка контроллера.
Контроллеры SIMATIC S7-300 оснащены широким набором функций,
позволяющих в максимальной степени упростить процесс разработки
программы, ее отладки, снизить затраты на обслуживание контроллера в
процессе его эксплуатации:
- высокое быстродействие, обеспечивающее существенное расширение
спектра допустимых областей применения контроллеров;
- поддержка математики с плавающей запятой, позволяющая выполнять
эффективную обработку данных;
- удобный интерфейс для настройки параметров: для настройки
параметров всех модулей используется единый набор
инструментальных средств с общим интерфейсом;
- человеко-машинный интерфейс, функции обслуживания человеко-
машинного интерфейса встроены в операционную систему
контроллера, эти функции позволяют существенно упростить
программирование;
- диагностические функции, встроенные в операционную систему
контроллера, с их помощью осуществляется непрерывный контроль
функционирования системы, и выявляются все возникающие отказы,
все диагностические сообщения с отметками даты и времени
накапливаются в кольцевом буфере для последующего анализа;
- парольная защита: обеспечивает эффективную защиту программы от
несанкционированного доступа, попыток копирования и модификации
программы;
- переключатель режимов работы: переключение режимов работы
производится специальным ключом (в SIMATIC S7-300C встроенным
35
переключателем), после удаления ключа из замочной скважины
заданный режим работы системы изменить невозможно.
Большое количество модулей программируемого контроллера S7-300
оснащено набором встроенных интеллектуальных функций, существенно
упрощающих эксплуатацию системы управления:
- мониторинг сбора сигналов (диагностика);
- мониторинг сигналов аппаратных прерываний.
Диагностика используется для определения работоспособности модулей
ввода дискретных и аналоговых сигналов. Для передачи диагностической
информации применяются маскируемые и не маскируемые сообщения:
- маскируемые диагностические сообщения, которые могут
пересылаться только в том случае, если это разрешено
соответствующими параметрами настройки;
- не маскируемые диагностические сообщения, пересылка которых
производится независимо от соответствующих параметров настройки.
Если диагностическое сообщение готово к передаче (например,
сообщение об отсутствии напряжения питания датчика), то модуль
генерирует диагностическое прерывание (для маскируемых сообщений
только в случае определения параметров разрешения передачи).
Центральный процессор прерывает выполнение программы пользователя или
задач с более низким приоритетом и вызывает соответствующий
организационный блок (OB 82). В зависимости от типа модуля
диагностические сообщения могут носить различный характер.
Контроллеры SIMATIC S7-300 обладают широкими
коммуникационными возможностями:
- коммуникационные процессоры для подключения к сетям PROFIBUS
(с встроенным оптическим или электрическим интерфейсом), Industrial
Ethernet и AS-интерфейсу;
- коммуникационные процессоры PPI для использования
последовательных (RS 232, TTY, RS 422/ RS 485) каналов связи;
- MPI интерфейс, встроенный в каждый центральный процессор и
позволяющий создавать простые и недорогие сетевые решения для
связи с программаторами, персональными ЭВМ, устройствами
человеко-машинного интерфейса, другими системами SIMATIC S7/ C7/
WinAC, параметры конфигурации MPI интерфейса могут быть
определены встроенными средствами STEP 7;
- центральные процессоры с встроенным интерфейсом PROFIBUS-DP.
Подключение контроллеров SIMATIC S7-300 к сети PROFIBUS-DP
может производиться с помощью коммуникационного процессора или через
встроенный интерфейс центрального процессора. Центральные процессоры с
встроенным интерфейсом PROFIBUS-DP позволяют создавать
распределенные системы автоматического управления со скоростным
обменом данными между ее компонентами через сеть PROFIBUS-DP. В
такой системе центральный процессор способен выполнять функции
36
ведущего или ведомого DP-устройства. Обращение к входам-выходам
устройств распределенного ввода-вывода производится теми же способами,
что и к входам-выходам системы локального ввода-вывода. Система
локального ввода-вывода образована набором модулей, установленных в
монтажных стойках контроллера.
2.5 Программное обеспечение
STEP 7 – это базовый пакет программ, включающий в свой состав весь
спектр инструментальных средств, необходимых для программирования и
эксплуатации систем управления, построенных на основе систем
автоматизации SIMATIC S7. Отличительной особенностью пакета STEP 7
является возможность разработки комплексных проектов автоматизации,
базирующихся на использовании множества программируемых
контроллеров, промышленных компьютеров, устройств и систем человеко-
машинного интерфейса, устройств распределенного ввода-вывода, сетевых
структур промышленной связи. Ограничения на разработку таких проектов
накладываются только функциональными возможностями программаторов
или компьютеров, на которых инсталлирован STEP 7. [10]
Инструментальные средства STEP 7 позволяют выполнять:
- конфигурирование и определение параметров настройки аппаратуры;
- конфигурирование систем промышленной связи и настройку
параметров передачи данных;
- программирование, тестирование, отладку и запуск программ
отдельных систем автоматизации, а также их локальное или
дистанционное обслуживание;
- документирование и архивирование данных проекта;
- функции оперативного управления и диагностирования аппаратуры.
Все перечисленные функции поддерживаются мощной системой
интерактивной помощи.
STEP 7 входит в комплект поставки всех программаторов семейства
SIMATIC PG. Он может поставляться в виде самостоятельного пакета
программ для персональных компьютеров, работающих под управлением
операционных систем Windows 95/98/NT/ME/2000. Для возможности
подключения программируемых контроллеров компьютер должен быть
оснащен MPI картой или PC адаптером и соединительным кабелем. STEP 7
обеспечивает параллельное выполнение работ по одному проекту
несколькими разработчиками. Единственным ограничением при этом
является невозможность одновременной записи данных несколькими
разработчиками.
STEP 7 объединяет все файлы программ пользователя и все файлы
данных в блоки. В пределах одного блока могут быть использованы
другие блоки. Механизм их вызова напоминает вызов подпрограмм. Это
позволяет улучшать структуру программы пользователя, повышать их
37

наглядность, обеспечить удобство их модификации, перенос готовых
блоков из одной программы в другую. В составе программ STEP 7 могут
быть использованы организационные, функциональные, системные блоки,
функции, блоки данных.
Организационные блоки (ОВ), которые осуществляют управление
ходом выполнения программы, в соответствии с рисунком 2.13. В
зависимости от способа запуска (циклическое выполнение, запуск по
временному прерыванию, запуск по событию и т.д.) организационные блоки
разделяются на классы, имеющие различные уровни приоритета.
Рисунок 2.14 – Управление ходом выполнения программы.
Функциональные блоки (FB) содержат отдельные части программы
пользователя. Выполнение функциональных блоков сопровождается
обработкой различных данных. Эти данные, внутренние переменные и
результаты обработки загружаются в выделенный для этой цели блок данных
IDB. Управление данными, хранящимися в IDB, осуществляет операционная
система программируемого контроллера.
Для каждого функционального (FB) и системного функционального
(SFB) блока операционная система контроллера создает служебный блок
данных IDB (Instance-data Block). IDB генерируются автоматически после
компиляции FB и SFB. Доступ к данным, хранящимся в IDB, может быть
осуществлен из программы пользователя или из системы
человекомашинного интерфейса.
Функции (FC) – блоки, которые содержат программы вычисления
используемых функций. Каждая функция формирует фиксированную
выходную величину на основе получаемых входных данных. К моменту
вызова функции все ее входные данные должны быть определены. Такой
механизм позволяет использовать функции без блоков данных.
38
Блоки данных (DB) предназначены для хранения данных пользователя.
В отличие от данных, хранящихся в IDB и используемых одним блоком FB
или SFB, глобальные данные, хранящиеся в DB, могут использоваться
любым из программных модулей. В DB могут храниться данные, имеющие
элементарный или структурный тип. Примерами данных элементарного типа
могут служить данные логического (BOOL), целого (INTEGER),
действительного (REAL) или других типов. Данные структурного типа
формируются из данных элементарного типа. Для обращения к данным,
записанным в DB, может использоваться символьная адресация.
Системные функциональные блоки (SFB) – это функциональные блоки,
встроенные в операционную систему центрального процессора (например,
SEND/ RECEIVE). Эти блоки не занимают места в памяти программ
контроллера, но требуют использования IDB.
Системные функции (SFC) – это функции, встроенные в операционную
систему контроллера. Например, функции таймеров, счетчиков, передачи
блоков данных и т.д.
Системные блоки данных (SDB) – это блоки для хранения данных
операционной системы центрального процессора. К этим данным относятся
параметры настройки системы и отдельных модулей (аппаратных модулей).
Редакторы стандартных языков обеспечивают полную графическую
поддержку программирования со следующими характеристиками:
- простое и интуитивное использование, создание программы
поддерживается дружественным пользователю интерфейсом и
позволяет использовать стандартные механизмы работы с Windows;
- библиотеки заранее подготовленных сложных функций (например,
ПИД регулирования) и разработанных пользователем решений.
STEP 7 оснащен исчерпывающим набором инструкций, позволяющим
легко и просто решать любые задачи автоматического управления.
ПИД – регулирование реализовано с помощью системного
функционального блока SFB 41.
SFB 41 используется в программируемых логических контроллерах для
управления техническими процессами с непрерывными входным и и
выходными переменными. При назначении параметров можно активировать
и деактивировать отдельные функции ПИД – регулятора чтобы адаптировать
его к процессу. Этот регулятор можно использовать как ПИД – регулятор с
постоянными уставками или в многоконтурных системах регулирования в
качестве каскадного регулятора, регулятора состава смеси или
пропорционального регулятора
Функции регулятора основаны на ПИД – алгоритме регулирования
дискретного регулятора с аналоговым сигналом дополненном в необходимых
случаях ступенью формирования импульсов в целях формирования
выходных сигналов с широтно – импульсной модуляцией для двух- или
трехпозиционного регулирования с пропорциональными исполнительными
звеньями.
39
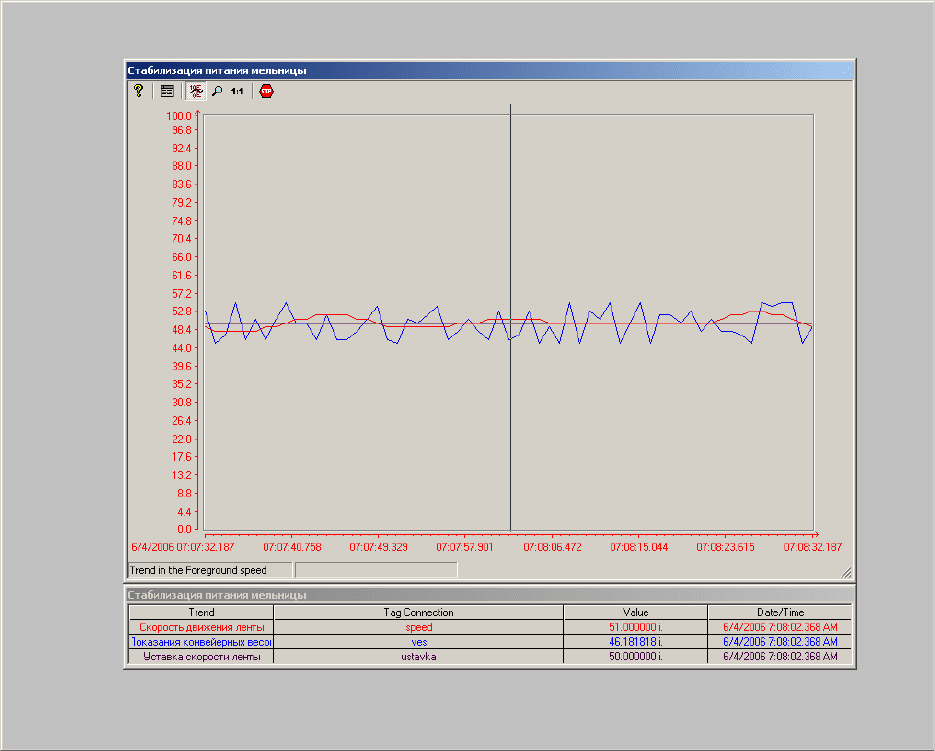
Результатом применения программного обеспечения STEP 7 для
автоматизации процесса измельчения является стабилизация основных
параметров измельчения, представленная в виде трендов, в соответствии с
рисунком 2.14
Рисунок 2.14 – Стабилизация параметров мельницы.
Тренды представлены установленным для уже созданных
технологических линий программным продуктом SIMATIC WinCC.
Открытая система визуализации фирмы позволяет легко и просто
интегрировать операторский интерфейс в создаваемые или уже
существующие системы технологического управления избежав при этом
непомерных затрат на проектирование и отладку программного обеспечения.
Ядро продукта образует нейтральная по отношению к отраслям
промышленности базовая система которая оснащена важнейшими
функциями, необходимыми для автоматизации, визуализации и гибкого
управления технологическими процессами.
Управление технологической линией обеспечено блоками и функциями
программной среды STEP 7, оптимизация процесса измельчения системными
функциональными блоками SFB 41, визуализация изменения
40