Dan B. Marghitu, Mechanisms and Robots Analysis with MATLAB®
Подождите немного. Документ загружается.

Mechanisms and Robots Analysis with MATLAB
®
Dan B. Marghitu
Mechanisms and Robots
Analysis with MATLAB
®
123
Dan B. Marghitu, Professor
Mechanical Engineering Department
Auburn University
270 Ross Hall
Auburn, AL 36849
USA
ISBN 978-1-84800-390-3 e-ISBN 978-1-84800-391-0
DOI 10.1007/978-1-84800-391-0
Springer Dordrecht Heidelberg London New York
British Library Cataloguing in Publication Data
A catalogue record for this book is available from the British Library
Library of Congress Control Number: 2009920949
© Springer-Verlag London Limited 2009
MATLAB
®
and Simulink
®
are registered trademarks of The MathWorks, Inc., 3 Apple Hill Drive,
Natick, MA 01760-2098, USA. http://www.mathworks.com
Apart from any fair dealing for the purposes of research or private study, or criticism or review, as
permitted under the Copyright, Designs and Patents Act 1988, this publication may only be
reproduced, stored or transmitted, in any form or by any means, with the prior permission in writing o
f
the publishers, or in the case of reprographic reproduction in accordance with the terms of licences
issued by the Copyright Licensing Agency. Enquiries concerning reproduction outside those terms
should be sent to the publishers.
The use of registered names, trademarks, etc. in this publication does not imply, even in the absence o
f
a specific statement, that such names are exempt from the relevant laws and regulations and therefore
free for general use.
The publisher makes no representation, express or implied, with regard to the accuracy of the
information contained in this book and cannot accept any legal responsibility or liability for any errors
or omissions that may be made.
Cover design: eStudioCalamar, Figueres/Berlin
Printed on acid-free paper
Springer is part of Springer Science+Business Media (www.springer.com)
to Stefania, to Daniela,
to Valeria, to Emil
Preface
Mechanisms and robots have been and continue to be essential components of me-
chanical systems. Mechanisms and robots are used to transmit forces and moments
and to manipulate objects. A knowledge of the kinematics and dynamics of these
kinematic chains is most important for their design and control. MATLAB
R
is a
modern tool that has transformed the mathematical calculations methods because
MATLAB not only provides numerical calculations but also facilitates analytical
calculations using the computer. The present textbook uses MATLAB as a tool to
solve problems from mechanisms and robots. The intent is to show the convenience
of MATLAB for mechanism and robot analysis. Using example problems the MAT-
LAB syntax will be demonstrated. MATLAB is very useful in the process of deriv-
ing solutions for any problem in mechanisms or robots. The book includes a large
number of problems that are being solved using MATLAB. The programs are avail-
able as appendices at the end of this book.
Chapter 1 comments on the fundamentals properties of closed and open kine-
matic chains especially of problems of motion, degrees of freedom, joints, dyads,
and independent contours. Chapter 2 demonstrates the use of MATLAB in find-
ing the positions of planar mechanisms using the absolute Cartesian method. The
positions of the joints are calculated for an input driver angle and for a complete
rotation of the driver link. An external m-file function can be introduced to calcu-
late the positions. The trajectory of a point on a link with general plane motion is
plotted using MATLAB. In Chap. 3 the velocities and acceleration are examined.
MATLAB is a suitable tool to develop analytical solutions and numerical results for
kinematics using the classical method, the derivative method, and the independent
contour equations. In Chap. 4, the joint forces are calculated using the free-body di-
agram of individual links, the diagram of dyads, and the contour method.
MATLAB functions are applied to find and solve the algebraic equations of motion.
Problems of dynamics using the Newton–Euler method are discussed in Chap. 5.
The equations of motion are inferred with symbolical calculation and the system of
differential equations is solved with numerical techniques. Finally, the last chapter
uses computer algebra to find Lagrange’s equations and Kane’s dynamical equations
for spatial robots.
vii
free-body
Contents
1 Introduction ................................................... 1
1.1 Degrees of Freedom and Motion . . ............................ 1
1.2 Kinematic Pairs . . .......................................... 3
1.3 Dyads . ................................................... 8
1.4 Independent Contours . . ..................................... 10
1.5 Planar Mechanism Decomposition ............................ 10
2 Position Analysis ............................................... 15
2.1 Absolute Cartesian Method . ................................. 15
2.2 Slider-Crank (R-RRT) Mechanism ............................ 16
2.3 Four-Bar (R-RRR) Mechanism . . . ............................ 20
2.4 R-RTR-RTR Mechanism . . . ................................. 27
2.5 R-RTR-RTR Mechanism: Complete Rotation ................... 31
2.5.1 Method I: Constraint Conditions ....................... 31
2.5.2 Method II: Euclidian Distance Function . . . .............. 35
2.6 Path of a Point on a Link with General Plane Motion . . . .......... 37
2.7 Creating a Movie . .......................................... 40
3 Velocity and Acceleration Analysis ............................... 43
3.1 Introduction . .............................................. 43
3.2 Velocity Field for a Rigid Body............................... 44
3.3 Acceleration Field for a Rigid Body . . . ........................ 46
3.4 Motion of a Point that Moves Relative to a Rigid Body . .......... 50
3.5 Slider-Crank (R-RRT) Mechanism ............................ 53
3.6 Four-Bar (R-RRR) Mechanism . . . ............................ 60
3.7 Inverted Slider-Crank Mechanism . ............................ 65
3.8 R-RTR-RTR Mechanism . . . ................................. 71
3.9 Derivative Method .......................................... 79
3.10 Independent Contour Equations . . . ............................ 95
ix
x Contents
4 Dynamic Force Analysis ........................................109
4.1 Equation of Motion for General Planar Motion ..................109
4.2 D’Alembert’s Principle . .....................................114
4.3 Free-Body Diagrams . . . .....................................115
4.4 Force Analysis Using Dyads .................................116
4.4.1 RRR Dyad ..........................................116
4.4.2 RRT Dyad ..........................................118
4.4.3 RTR Dyad ..........................................119
4.5 Force Analysis Using Contour Method . . .......................120
4.6 Slider-Crank (R-RRT) Mechanism ............................121
4.6.1 Inertia Forces and Moments ...........................124
4.6.2 Joint Forces and Drive Moment . .......................126
4.7 R-RTR-RTR Mechanism . . . .................................147
4.7.1 Inertia Forces and Moments ...........................151
4.7.2 Joint Forces and Drive Moment . .......................154
5 Direct Dynamics: Newton–Euler Equations of Motion ..............183
5.1 Compound Pendulum . . .....................................183
5.2 Double Pendulum ..........................................192
5.3 One-Link Planar Robot Arm .................................201
5.4 Two-Link Planar Robot Arm .................................204
6 Analytical Dynamics of Open Kinematic Chains ...................209
6.1 Generalized Coordinates and Constraints .......................209
6.2 Laws of Motion . . ..........................................211
6.3 Lagrange’s Equations for Two-Link Robot Arm . . . ..............213
6.4 Rotation Transformation .....................................225
6.5 RRT Robot Arm . ..........................................228
6.5.1 Direct Dynamics .....................................228
6.5.2 Inverse Dynamics . . . .................................246
6.5.3 Kane’s Dynamical Equations . . . .......................250
6.6 RRTR Robot Arm ..........................................257
7 Problems ......................................................275
7.1 Problem Set: Mechanisms . . .................................275
7.2 Problem Set: Robots . . . .....................................291
A Programs of Chapter 2: Position Analysis .........................301
A.1 Slider-Crank (R-RRT) Mechanism ............................301
A.2 Four-Bar (R-RRR) Mechanism . . . ............................303
A.3 R-RTR-RTR Mechanism . . . .................................306
A.4 R-RTR-RTR Mechanism: Complete Rotation ...................309
A.5 R-RTR-RTR Mechanism: Complete Rotation Using Euclidian
Distance Function ..........................................312
A.6 Path of a Point on a Link with General Plane Motion: R-RRT
Mechanism . . ..............................................314
Contents xi
A.7 Path of a Point on a Link with General Plane Motion: R-RRR
Mechanism . . ..............................................315
B Programs of Chapter 3: Velocity and Acceleration Analysis .........317
B.1 Slider-Crank (R-RRT) Mechanism ............................317
B.2 Four-Bar (R-RRR) Mechanism . . . ............................322
B.3 Inverted Slider-Crank Mechanism . ............................326
B.4 R-RTR-RTR Mechanism . . . .................................331
B.5 R-RTR-RTR Mechanism: Derivative Method ...................339
B.6 Inverted Slider-Crank Mechanism: Derivative Method . . ..........344
B.7 R-RTR Mechanism: Derivative Method ........................347
B.8 R-RRR Mechanism: Derivative Method ........................349
B.9 R-RTR-RTR Mechanism: Contour Method . . ...................354
C Programs of Chapter 4: Dynamic Force Analysis ..................363
C.1 Slider-Crank (R-RRT) Mechanism: Newton–Euler Method . . . .....363
C.2 Slider-Crank (R-RRT) Mechanism: D’Alembert’s Principle . . .....368
C.3 Slider-Crank (R-RRT) Mechanism: Dyad Method . ..............372
C.4 Slider-Crank (R-RRT) Mechanism: Contour Method . . . ..........378
C.5 R-RTR-RTR Mechanism: Newton–Euler Method . . ..............382
C.6 R-RTR-RTR Mechanism: Dyad Method .......................396
C.7 R-RTR-RTR Mechanism: Contour Method . . ...................408
D Programs of Chapter 5: Direct Dynamics .........................423
D.1 Compound Pendulum . . .....................................423
D.2 Compound Pendulum Using the Function R(t,x) ..............425
D.3 Double Pendulum ..........................................426
D.4 Double Pendulum Using the File RR.m ........................428
D.5 One-Link Planar Robot Arm .................................430
D.6 One-Link Planar Robot Arm Using the m-File Function
Rrobot.m ...............................................432
D.7 Two-Link Planar Robot Arm Using the m-File Function
RRrobot.m ..............................................433
E Programs of Chapter 6: Analytical Dynamics .....................437
E.1 Lagrange’s Equations for Two-Link Robot Arm . . . ..............437
E.2 Two-Link Robot Arm: Inverse Dynamics .......................442
E.3 RRT Robot Arm . ..........................................444
E.4 RRT Robot Arm: Inverse Dynamics . . . ........................453
E.5 RRT Robot Arm: Kane’s Dynamical Equations ..................457
E.6 RRTR Robot Arm ..........................................462
References .........................................................475
Index .............................................................477
Chapter 1
Introduction
1.1 Degrees of Freedom and Motion
The number of degrees of freedom (DOF) of a mechanical system is equal to the
number of independent parameters (measurements) that are needed to uniquely de-
fine its position in space at any instant of time. The number of DOF is defined with
respect to a reference frame.
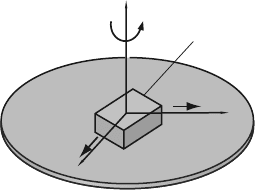
Figure 1.1 shows a rigid body (RB) lying in a plane. The distance between two
particles on the rigid body is constant at any time. If this rigid body always remains
in the plane, three parameters (three DOF) are required to completely define its
position: two linear coordinates (x,y) to define the position of any one point on the
rigid body, and one angular coordinate θ to define the angle of the body with respect
to the axes. The minimum number of measurements needed to define its position are
shown in the figure as x,y, and θ . A rigid body in a plane then has three degrees of
freedom. The particular parameters chosen to define its position are not unique.
Any alternative set of three parameters could be used. There is an infinity of sets
of parameters possible, but in this case there must always be three parameters per
set, such as two lengths and an angle, to define the position because a rigid body in
plane motion has three DOF.
Six parameters are needed to define the position of a free rigid body in a three-
dimensional (3-D) space. One possible set of parameters that could be used are
Fig. 1.1 Rigid body in planar
motion with three DOF:
translation along the x-axis,
translation along the y-axis,
and rotation, θ , about the
z-axis
θ
x
y
z
RB
1