Dan B. Marghitu, Mechanisms and Robots Analysis with MATLAB®
Подождите немного. Документ загружается.


2.3 Four-Bar (R-RRR) Mechanism 23
A
D
B
x
y
C = C
1
C
2
Circle of radius DC and center at D
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Circle of radius BC and center at B
φ
Fig. 2.5 Two solutions for the position of joint C
The MATLAB program for selecting the correct position of C is:
if xC1 < xD
xC = xC1; yC=yC1;
else
xC = xC2; yC=yC2;
end
rC = [xC yC 0]; % Position vector of C
Position of Point E
The unknowns are the coordinates of the point E, x
E
and y
E
. The position of the
point E is determined from the equation
(x
E
−x
C
)
2
+(y
E
−y
C
)
2
= CE
2
, (2.7)
or
(x
E
−0.0401)
2
+(y
E
−0.4498)
2
= 0.15
2
.

24 2 Position Analysis
The joints D, C and E are located on the same straight element DE. For these points,
the following equation can be written
y
D
−y
C
x
D
−x
C
=
y
E
−y
C
x
E
−x
C
, (2.8)
or
0.300 −0.4498
0.300 −0.0401
=
y
E
−0.4498
x
E
−0.0401
.
Equations 2.7 and 2.8 form a system from which the coordinates of the point E can
be computed. Two solutions are obtained, Fig. 2.6, and the numerical values are
x
E
1
= −0.0899 m, y
E
1
= 0.5247 m,
x
E
2
= 0.1700 m, y
E
2
= 0.3749 m.
The MATLAB program for calculating the coordinates of E
1
and E
2
is:
eqnE1 = ’( xEsol - xC )ˆ2 + ( yEsol - yC )ˆ2 = CEˆ2 ’;
eqnE2 = ’(yD-yC)/(xD-xC)=(yEsol-yC )/(xEsol-xC)’;
solE = solve(eqnE1, eqnE2, ’xEsol, yEsol’);
A
D
B
y
C
E = E
1
E
2
Circle of radius CE and center at C
-0.2 -0.1 0.1 0.2 0.3 0.4
0
0.1
0.2
0.3
0.4
0.5
φ
Fig. 2.6 Two solutions for the position of point E

2.3 Four-Bar (R-RRR) Mechanism 25
xEpositions=eval(solE.xEsol);
yEpositions=eval(solE.yEsol);
xE1 = xEpositions(1); xE2 = xEpositions(2);
yE1 = yEpositions(1); yE2 = yEpositions(2);
For continuous motion of the mechanism, a constraint condition is needed, x
E
< x
C
.
Using this condition, the coordinates of the point E are
x
E
= x
E
1
= −0.0899 m and y
E
= y
E
1
= 0.5247 m.
The MATLAB program for selecting the correct position of E is
if xE1 < xC
xE = xE1; yE=yE1;
else
xE = xE2; yE=yE2;
end
rE = [xE yE 0]; % Position vector of E
The angles of the links 2, 3, and 4 with the horizontal are
φ
2
= arctan
y
B
−y
C
x
B
−x
C
, φ
3
= arctan
y
D
−y
C
x
D
−x
C
,
and in MATLAB
phi2 = atan((yB-yC)/(xB-xC));
phi3 = atan((yD-yC)/(xD-xC));
The results are printed using the statements:
fprintf(’rA = [ %g, %g, %g ] (m) \n’, rA)
fprintf(’rD = [ %g, %g, %g ] (m) \n’, rD)
fprintf(’rB = [ %g, %g, %g ] (m) \n’, rB)
fprintf(’rC = [ %g, %g, %g ] (m) \n’, rC)
fprintf(’rE = [ %g, %g, %g ] (m) \n’, rE)
fprintf(’phi2 = %g (degrees) \n’, phi2
*
180/pi)
fprintf(’phi3 = %g (degrees) \n’, phi3
*
180/pi)
The graph of the mechanism using MATLAB for φ = π/4 is given by:
plot([xA,xB],[yA,yB],’k-o’,’LineWidth’,1.5)
hold on % holds the current plot
plot([xB,xC],[yB,yC],’b-o’,’LineWidth’,1.5)
hold on
plot([xD,xE],[yD,yE],’r-o’,’LineWidth’,1.5)

26 2 Position Analysis
−0.2 −0.1 0 0.1 0.2 0.3 0.4
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
x (m)
y (m)
positions for φ = 45 (deg)
← A = ground
B
← C = ground
← D = ground
E
Fig. 2.7 MATLAB graphic of R-RRR mechanism
% adds major grid lines to the current axes
grid on,...
xlabel(’x (m)’), ylabel(’y (m)’),...
title(’positions for \phi = 45 (deg)’),...
text(xA,yA,’\leftarrow A = ground’,...
’HorizontalAlignment’,’left’),...
text(xB,yB,’ B’),...
text(xC,yC,’\leftarrow C = ground’,...
’HorizontalAlignment’,’left’),...
text(xD,yD,’\leftarrow D = ground’,...
’HorizontalAlignment’,’left’),...
text(xE,yE,’ E’), axis([-0.2 0.45 -0.1 0.6])
The graph of the R-RRR mechanism using MATLAB is shown in Fig. 2.7. The
MATLAB program for the positions and the results is given in Appendix A.2.

2.4 R-RTR-RTR Mechanism 27
2.4 R-RTR-RTR Mechanism
Exercise
The planar R-RTR-RTR mechanism considered is shown in Fig. 2.8. The driver
link is the rigid link 1 (the link AB). The following numerical data are given: AB =
0.15 m, AC = 0.10 m, CD = 0.15 m, DF = 0.40 m, and AG = 0.30 m. The angle of
the driver link 1 with the horizontal axis is φ = 30
◦
.
y
A
C
D
x
B
F
G
1
2
5
4
3
φ
0
0
Fig. 2.8 R-RTR-RTR mechanism
Solution
The MATLAB commands for the input data are:
AB=0.15; AC=0.10; CD=0.15; %(m)
phi=pi/6; %(rad)
DF=0.40; AG=0.30; % (m)
A Cartesian reference frame xOy is selected. The joint A is in the origin of the ref-
erence frame, that is, A ≡ O, x
A
= 0, y
A
= 0.
Position of Joint C
The position vector of C is r
C
= x
C
ı + y
C
j = 0.1 j m.
Position of Joint B
The unknowns are the coordinates of the joint B, x
B
and y
B
. Because the joint A is
fixed and the angle φ is known, the coordinates of the joint B are computed from the
following expressions:

28 2 Position Analysis
x
B
= AB cosφ = 0.15 cos30
◦
= 0.1299 m, y
B
= AB sinφ = 0.15 sin30
◦
= 0.075 m,
and r
B
= x
B
ı + y
B
j. The MATLAB statements for the positions of the joints A, C,
E, and B are:
xA=0;yA=0;rA=[xAyA0]; %Position of A
xC=0;yC=AC;rC=[xCyC0];%Position of C
% Position of B
xB=AB
*
cos(phi); yB=AB
*
sin(phi); rB=[xB yB 0];
Position of Joint D
The unknowns are the coordinates of the joint D, x
D
and y
D
. The length of the
segment CD is constant:
(x
D
−x
C
)
2
+(y
D
−y
C
)
2
= CD
2
, (2.9)
or
(x
D
−0)
2
+(y
D
−0.10)
2
= 0.15
2
.
The points B, C, and D are on the same straight line with the slope
m =
(y
B
−y
C
)
(x
B
−x
C
)
=
(y
D
−y
C
)
(x
D
−x
C
)
, (2.10)
or
(0.075 −0.1)
(0.1299 −0.0)
=
(y
D
−0.1)
(x
D
−0.0)
.
Equations 2.9 and 2.10 form a system from which the coordinates of the joint D can
be computed. To solve the system of equations the MATLAB statement solve will
be used:
eqnD1=’( xDsol - xC )ˆ2 + ( yDsol - yC )ˆ2 = CDˆ2 ’;
eqnD2=’(yB - yC)/(xB - xC)=(yDsol - yC)/(xDsol - xC)’;
solD = solve(eqnD1, eqnD2, ’xDsol, yDsol’);
xDpositions = eval(solD.xDsol);
yDpositions = eval(solD.yDsol);
% first component of the vector xDpositions
xD1 = xDpositions(1);
% second component of the vector xDpositions
xD2 = xDpositions(2);
% first component of the vector yDpositions
yD1 = yDpositions(1);
% second component of the vector yDpositions
yD2 = yDpositions(2);

2.4 R-RTR-RTR Mechanism 29
y
A
C
x
B
F
G
1
Circle of radius CD and center at C
D = D
1
D
2
φ
x = x
D
D
1
x
D
2
Fig. 2.9 Graphical solutions for joint D
These solutions D
1
and D
2
are located at the intersection of the line BC with the
circle centered in C and radius CD (Fig. 2.9), and they have the following numerical
values:
x
D1
= −0.1473 m, y
D1
= 0.1283 m,
x
D2
= 0.1473 m, y
D2
= 0.0717 m.
To determine the correct position of the joint D for the mechanism, an additional
condition is needed. For the first quadrant, 0 ≤φ ≤ 90
◦
, the condition is x
D
≤ x
C
.
This condition with MATLAB is given by:
if xD1 <= xC
xD = xD1; yD=yD1;
else
xD = xD2; yD=yD2;
end
rD = [xD yD 0]; % Position of D
Because x
C
= 0, the coordinates of the joint D are:
x
D
= x
D1
= −0.1473 m and y
D
= y
D1
= 0.1283 m.

30 2 Position Analysis
The angles of the links 2, 3, and 4 with the horizontal are
φ
2
= arctan
y
B
−y
C
x
B
−x
C
, φ
3
= φ
2
, φ
4
= arctan
y
D
x
D
+ π, φ
5
= φ
4
,
and in MATLAB:
phi2 = atan((yB-yC)/(xB-xC));
phi3 = phi2;
phi4 = atan(yD/xD)+pi;
phi5 = phi4;
The points F and G are calculated in MATLAB with:
xF=xD+DF
*
cos(phi3) ; yF = yD + DF
*
sin(phi3) ;
rF = [xF yF 0]; % Position vector of F
xG=AG
*
cos(phi5) ; yG = AG
*
sin(phi5) ;
rG = [xG yG 0]; % Position vector of G
The results are printed using the statements:
fprintf(’rA = [ %g, %g, %g ] (m) \n’, rA)
fprintf(’rC = [ %g, %g, %g ] (m) \n’, rC)
fprintf(’rB = [ %g, %g, %g ] (m) \n’, rB)
fprintf(’rD = [ %g, %g, %g ] (m) \n’, rD)
fprintf(’phi2 = phi3 = %g (degrees) \n’, phi2
*
180/pi)
fprintf(’phi4 = phi5 = %g (degrees) \n’, phi4
*
180/pi)
fprintf(’rF = [ %g, %g, %g ] (m) \n’, rF)
fprintf(’rG = [ %g, %g, %g ] (m) \n’, rG)
The graph of the mechanism in MATLAB for φ = π/6 is given by:
plot([xA,xB],[yA,yB],’k-o’,’LineWidth’,1.5)
hold on % holds the current plot
plot([xD,xC],[yD,yC],’b-o’,’LineWidth’,1.5)
hold on
plot([xC,xB],[yC,yB],’b-o’,’LineWidth’,1.5)
hold on
plot([xB,xF],[yB,yF],’b-o’,’LineWidth’,1.5)
hold on
plot([xA,xD],[yA,yD],’r-o’,’LineWidth’,1.5)
hold on
plot([xD,xG],[yD,yG],’r-o’,’LineWidth’,1.5)
grid on,...
xlabel(’x (m)’), ylabel(’y (m)’),...
title(’positions for \phi = 30 (deg)’),...
2.5 R-RTR-RTR Mechanism: Complete Rotation 31
text(xA,yA,’\leftarrow A = ground’,...
’HorizontalAlignment’,’left’),...
text(xB,yB,’ B’),...
text(xC,yC,’\leftarrow C = ground’,...
’HorizontalAlignment’,’left’),...
text(xD,yD,’ D’),...
text(xF,yF,’ F’), text(xG,yG,’ G’),...
axis([-0.3 0.3 -0.1 0.3])
The MATLAB program for the positions and the results for the R-RTR-RTR mech-
anism for φ = 30
◦
is given in Appendix A.3.
2.5 R-RTR-RTR Mechanism: Complete Rotation
For a complete rotation of the driver link AB,0≤ φ ≤ 360
◦
, a step angle of 60
◦
is
selected. To calculate the position analysis for a complete cycle the MATLAB state-
ment for var=startval:step:endval, statement end is used. It repeatedly evalu-
ates statement in a loop. The counter variable of the loop is var. At the start, the
variable is initialized to value startval and is incremented (or decremented when
step is negative) by the value step for each iteration. The statement is repeated until
var has incremented to the value endval. For the considered mechanism the follow-
ing applies:
for phi=0:pi/3:2
*
pi, Program block, end;
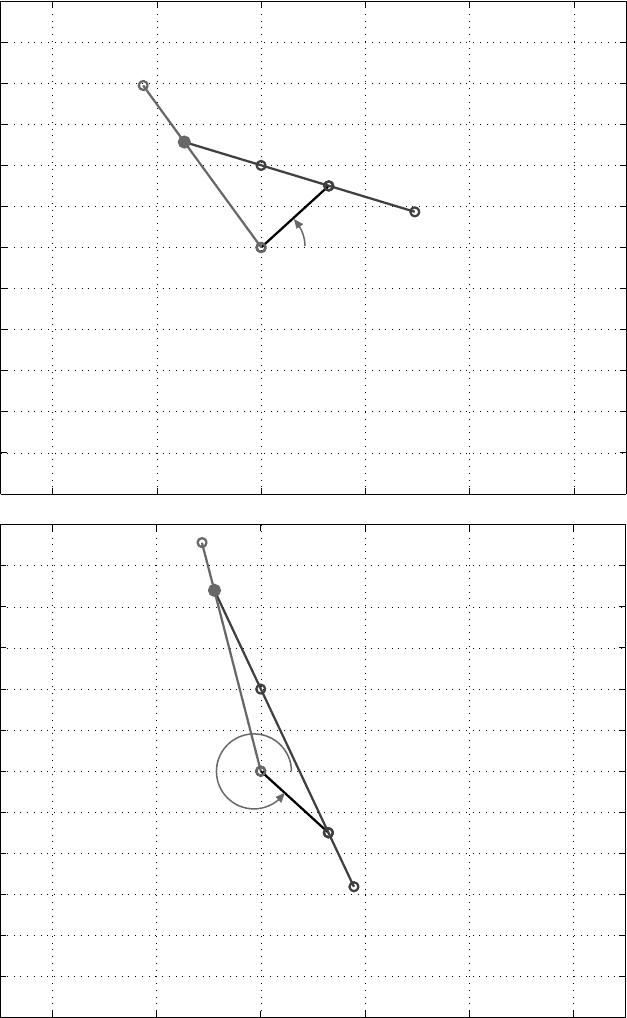
2.5.1 Method I: Constraint Conditions
Method I uses constraint conditions for the mechanism for each quadrant. For the
mechanism, there are several conditions for the position of the joint D. For the angle
φ located in the first quadrant 0
◦
≤φ ≤90
◦
and the fourth quadrant 270
◦
≤φ ≤360
◦
(Fig. 2.10), the following relation exists between x
D
and x
C
:
x
D
≤ x
C
= 0.
For the angle φ located in the second quadrant 90
◦
< φ ≤180
◦
and the third quadrant
180
◦
< φ < 270
◦
(Fig. 2.11), the following relation exists between x
D
and x
C
:
x
D
≥ x
C
= 0.
The following MATLAB commands are used to determine the correct position of
the joint D for all four quadrants:
32 2 Position Analysis
−0.4 −0.2 0 0.2 0.4 0.6
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
A
B
C
D
F
G
φ
−0.25
−0.2
−0.15
−0.1
0
0.05
0.1
0.15
0.2
0.25
A
B
C
D
F
G
φ
Fig. 2.10 R-RTR-RTR mechanism for 0
◦
< φ ≤90
◦
and 270
◦
≤ φ ≤360
◦