Dan B. Marghitu, Mechanisms and Robots Analysis with MATLAB®
Подождите немного. Документ загружается.

44 3 Velocity and Acceleration Analysis
A reference frame that moves with the rigid body is a body-fixed (or rotating)
reference frame. The unit vectors ı, j
, and k of the body-fixed reference frame are
not constant, because they rotate with the body-fixed reference frame. The location
of the point O is arbitrary.
The position vector of a point M, M ∈ (RB), with respect to the fixed reference
frame x
0
y
0
z
0
is denoted by r
1
= r
O
0
M
and with respect to the rotating reference
frame Oxyz is denoted by r = r
OM
. The location of the origin O of the rotating
reference frame with respect to the fixed point O
0
is defined by the position vector
r
O
= r
O
0
O
. Then, the relation between the vectors r
1
, r and r
0
is given by
r
1
= r
O
+ r = r
O
+ x ı + y j + zk, (3.1)
where x, y, and z represent the projections of the vector r = r
OM
on the rotating
reference frame r = xı + y j
+ zk.
The magnitude of the vector r = r
OM
is a constant as the distance between the
points O and M is constant, O ∈ (RB), and M ∈ (RB). Thus, the x, y and z compo-
nents of the vector r with respect to the rotating reference frame are constant. The
unit vectors ı, j
, and k are time-dependent vector functions. The vectors ı, j and k
are the unit vector of an orthogonal Cartesian reference frame, thus one can write
ı ·ı = 1, j
·j = 1, k ·k = 1, (3.2)
ı ·j
= 0, j ·k = 0, k ·ı = 0. (3.3)
3.2 Velocity Field for a Rigid Body
The velocity of an arbitrary point M of the rigid body with respect to the fixed
reference frame x
0
y
0
z
0
, is the derivative with respect to time of the position vector r
1
v =
dr
1
dt
=
dr
O
0
M
dt
=
dr
O
dt
+
dr
dt
= v
O
+ x
dı
dt
+ y
dj
dt
+ z
dk
dt
+
dx
dt
ı +
dy
dt
j
+
dz
dt
k, (3.4)
where v
O
=
˙
r
O
represent the velocity of the origin of the rotating reference frame
O
1
x
1
y
1
z
1
with respect to the fixed reference frame Oxyz. Because all the points in
the rigid body maintain their relative position, their velocity relative to the rotating
reference frame xyz is zero, i.e., ˙x = ˙y = ˙z = 0.
The velocity of point M is
v = v
O
+ x
dı
dt
+ y
dj
dt
+ z
dk
dt
= v
O
+ x i + y j + z
˙
k.
The derivative of the Eqs. 3.2 and 3.3 with respect to time gives

3.2 Velocity Field for a Rigid Body 45
dı
dt
·ı = 0,
dj
dt
·j
= 0,
dk
dt
·k = 0, (3.5)
and
dı
dt
·j
+ ı ·
dj
dt
= 0,
dj
dt
·k + j
·
dk
dt
= 0,
dk
dt
·ı + k ·
dı
dt
= 0. (3.6)
For Eq. 3.6 the following notation is used
dı
dt
·j
= −ı ·
dj
dt
= ω
z
,
dj
dt
·k = −j
·
dk
dt
= ω
x
,
dk
dt
·ı = −k ·
dı
dt
= ω
y
, (3.7)
where ω
x
, ω
y
and ω
z
may be considered as the projections of a vector ω
ω
= ω
x
ı + ω
y
j + ω
z
k.
To calculate
dı
dt
,
dj
dt
,
dk
dt
the relation for an arbitrary vector v will be used
v = v
x
ı + v
y
j + v
z
k =(v ·ı)ı +(v ·j)j +(v ·k) k. (3.8)
Using Eq. 3.8 and the results from Eqs. 3.5 and 3.6 one can write
dı
dt
=
dı
dt
·ı
ı +
dı
dt
·j
j
+
dı
dt
·k
k
=(0)ı +(ω
z
)j −(ω
y
)k
=
ıj
k
ω
x
ω
y
ω
z
100
=
ω ×ı,
dj
dt
=
dj
dt
·ı
ı +
dj
dt
·j
j
+
dj
dt
·k
k
=(−ω
z
)ı +(0)j +(ω
x
)k
=
ıj
k
ω
x
ω
y
ω
z
010
=
ω ×j,
dk
dt
=
dk
dt
·ı
ı +
dk
dt
·j
j
+
dk
dt
·k
k (3.9)
=(ω
y
)ı −(ω
x
)j +(0)k

46 3 Velocity and Acceleration Analysis
=
ıj
k
ω
x
ω
y
ω
z
001
=
ω ×k.
The relations
dı
dt
=
ω ×ı,
dj
dt
=
ω ×j,
dk
dt
=
ω ×k. (3.10)
are known as Poisson formulas and
ω is the angular velocity vector. Using Eqs. 3.4
and 3.10 the velocity of the point M on the rigid body is
v = v
O
+ x ω ×ı + y ω ×j + zω ×k = v
O
+ ω ×(xı + y j + zk),
or
v = v
O
+ ω ×r. (3.11)
Combining Eqs. 3.4 and 3.11 it results that
dr
dt
=
˙
r =
ω ×r. (3.12)
Using Eq. 3.11 one can write the components of the velocity as
v
x
= v
Ox
+ zω
y
−yω
z
,
v
y
= v
Oy
+ x ω
z
−zω
x
,
v
z
= v
Oz
+ yω
x
−x ω
y
.
The relation between the velocities v
M
and v
O
of two points M and O on the rigid
body is
v
M
= v
O
+ ω ×r
OM
, (3.13)
or
v
M
= v
O
+ v
rel
MO
, (3.14)
where v
rel
MO
is the relative velocity, for rotational motion, of M with respect to O and
is given by
v
rel
MO
= v
MO
= ω ×r
OM
. (3.15)
The relative velocity v
MO
is perpendicular to the position vector r
OM
, v
MO
⊥ r
OM
,
and has the direction given by the angular velocity vector
ω. The magnitude of the
relative velocity is |v
MO
| = v
MO
= ω r
OM
.
3.3 Acceleration Field for a Rigid Body
The acceleration of an arbitrary point M ∈(RB) with respect to a fixed reference
frame O
0
x
0
y
0
z
0
, represents the double derivative with respect to time of the position
vector r
1
3.3 Acceleration Field for a Rigid Body 47
a =
¨
r
1
=
˙
v =
dv
dt
=
d
dt
(v
O
+ ω ×r)=
dv
O
dt
+
d
ω
dt
×r +
ω ×
dr
dt
=
˙
v
O
+
˙
ω ×r + ω ×
˙
r. (3.16)
The acceleration of the point O with respect to the fixed reference frame O
0
x
0
y
0
z
0
is
a
O
=
˙
v
O
=
¨
r
O
. (3.17)
The derivative of the vector
ω with respect to the time is the angular acceleration
vector
α given by
α =
d
ω
dt
=
dω
x
dt
ı +
dω
y
dt
j
+
dω
z
dt
k + ω
x
dı
dt
+ ω
y
dj
dt
+ ω
z
dk
dt
= α
x
ı + α
y
j + α
z
k + ω
x
ω ×ı + ω
y
ω ×j + ω
z
ω ×k
= α
x
ı + α
y
j
+ α
z
k + ω ×ω =α
x
ı + α
y
j + α
z
k, (3.18)
where α
x
=
dω
x
dt
, α
y
=
dω
y
dt
, and α
z
=
dω
z
dt
. In the previous expression the Poisson
formulas have been used. Using Eqs. 3.16–3.18 the acceleration of the point M is
a = a
O
+ α ×r + ω ×(ω ×r). (3.19)
Using Eq. 3.19 the components of the acceleration are
a
x
= a
Ox
+(z α
y
−yα
z
)+ω
y
(yω
x
−x ω
y
)+ω
z
(x ω
x
−x ω
z
),
a
y
= a
Oy
+(x α
z
−zα
x
)+ω
z
(zω
y
−yω
z
)+ω
x
(x ω
y
−yω
z
),
a
z
= a
Oz
+(y α
x
−x α
y
)+ω
x
(x ω
z
−zω
x
)+ω
y
(yω
z
−zω
y
).
The relation between the accelerations a
M
and a
O
of two points M and O on the
rigid body is
a
M
= a
O
+ α ×r
OM
+ ω ×(ω ×r
OM
). (3.20)
In the case of planar motion
ω ×(ω ×r
OM
)=−ω
2
r
OM
,
and Eq. 3.20 becomes
a
M
= a
O
+ α ×r
OM
−ω
2
r
OM
. (3.21)
Equation 3.21 can be written as
a
M
= a
O
+ a
rel
MO
, (3.22)
where a
rel
MO
is the relative acceleration, for rotational motion, of M with respect to O
and is given by
a
rel
MO
= a
MO
= a
n
MO
+ a
t
MO
. (3.23)
48 3 Velocity and Acceleration Analysis
The normal relative acceleration of M with respect to O is
a
n
MO
= ω ×(ω ×r
OM
), (3.24)
is parallel to the position vector r
OM
, a
n
MO
||r
OM
, and has the direction towards the
center of rotation, from M to O. The magnitude of the normal relative acceleration
is
|a
n
MO
| = a
n
MO
= ω
2
r
OM
=
v
2
MO
r
OM
.
The tangential relative acceleration of M with respect to O
a
t
MO
= α ×r
OM
, (3.25)
is perpendicular to the position vector r
OM
, a
t
MO
⊥r
OM
, and has the direction given
by the angular aceeleration
α. The magnitude of the normal relative acceleration is
|a
t
MO
| = a
t
MO
= α r
OM
.
Remarks:
1. If the orientation of a rigid body (RB) in a reference frame RF
0
depends on only
a single scalar variable
ζ, there exists for each value of ζ a vector ω such that the
derivative with respect to
ζ in RF
0
of every vector c fixed in the rigid body (RB)
is given by
d c
dζ
= ω ×c, (3.26)
where the vector
ω is the rate of change of orientation of the rigid body (RB) in
the reference frame RF
0
with respect to ζ. The vector ω is given by
ω =
d a
dζ
×
d b
dζ
d a
dζ
·b
, (3.27)
where a and b are any two non-parallel vectors fixed in the rigid body (RB). The
vector
ω is a free vector, i.e. is not associated with any particular point. With
the help of
ω one can replace the process of differentiation with that of cross
multiplication. The vector
ω may be expressed in a symmetrical relation in a and
b
ω =
1
2
⎛
⎜
⎜
⎝
d a
dζ
×
d b
dζ
d a
dζ
·b
+
d b
dζ
×
d a
dζ
d b
dζ
·a
⎞
⎟
⎟
⎠
. (3.28)

3.3 Acceleration Field for a Rigid Body 49
2. The first derivatives of a vector p with respect to a scalar variable ζ in two refer-
ence frames RF
i
and RF
j
are related as follows
( j)
d p
dζ
=
(i)
d p
dζ
+ ω
ij
×p, (3.29)
where
ω
ij
is the rate of change of orientation of RF
i
in RF
j
with respect to ζ and
( j)
d p
dζ
is the total derivative of p with respect to ζ in RF
j
.
3. The angular velocity of a rigid body (RB) in a reference frame RF
0
is the rate of
change of orientation with respect to the time t
ω =
1
2
⎛
⎜
⎝
d a
dt
×
d b
dt
d a
dt
·b
+
d b
dt
×
d a
dt
d b
dt
·a
⎞
⎟
⎠
=
1
2
˙
a ×
˙
b
˙
a ·b
+
˙
b ×
˙
a
˙
b ·a
.
The direction of
ω is related to the direction of the rotation of the rigid body
through a right-hand rule.
4. Let RF
i
, i = 1,2,...,n be n reference frames. The angular velocity of a rigid body
r in the reference frame RF
n
, can be expressed as
ω
rn
= ω
r1
+ ω
12
+ ω
23
+ ... + ω
r,n−1
.
Proof
Let p be any vector fixed in the rigid body. Then,
(i)
d p
dt
=
ω
ri
×p
(i−1)
d p
dt
=
ω
r,i−1
×p.
On the other hand,
(i)
d p
dt
=
(i−1)
d p
dt
+
ω
i,i−1
×p.
Hence,
ω
ri
×p = ω
r,i−1
×p + ω
i,i−1
×p,
as this equation is satisfied for all p fixed in the rigid body
ω
ri
= ω
r,i−1
+ ω
i,i−1
. (3.30)
With i = n, Eq. 3.30 gives
ω
rn
= ω
r,n−1
+ ω
n,n−1
. (3.31)
50 3 Velocity and Acceleration Analysis
With i = n −1, Eq. 3.30 gives
ω
r,n−1
= ω
r,n−2
+ ω
n−1,n−2
. (3.32)
Substitute Eq. 3.32 into Eq. 3.31
ω
rn
= ω
r,n−2
+ ω
n−1,n−2
+ ω
n,n−1
.
Next use Eq. 3.30 with i = n −2, then with i = n −3, and so forth.
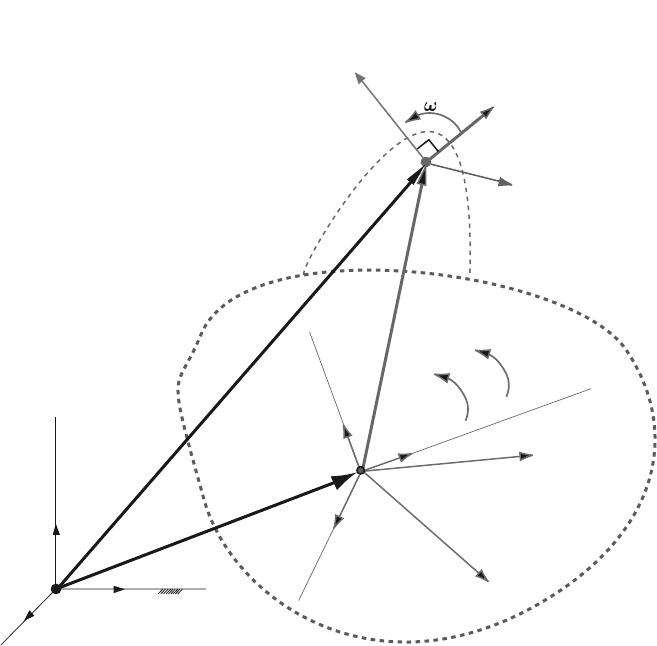
3.4 Motion of a Point that Moves Relative to a Rigid Body
A reference frame that moves with the rigid body is a body-fixed reference frame.
Figure 3.2 shows a rigid body (RB) in motion relative to a primary reference frame
with its origin at point O
0
, x
0
y
0
z
0
. The primary reference frame is a fixed reference
frame or an Earth-fixed reference frame. The unit vectors ı
0
,j
0
, and k
0
of the primary
reference frame are constant.
v
A(xyz)
a
A(xyz)
a
A(xyz)
=2ω × v
A(xyz)
r
OA
a
O
v
O
ω
r
O
r =
r
A
x
ı
y
j
z
k
ı
0
j
0
k
0
x
0
y
0
z
0
O
0
O
A
(RB)
α
cor
rel
rel
rel
Fig. 3.2 Rigid body in motion; the point A is not assumed to be a point of the rigid body, A /∈(RB)
3.4 Motion of a Point that Moves Relative to a Rigid Body 51
The body-fixed reference frame, xyz, has its origin at a point O of the rigid body
(O ∈ (RB)), and is a moving reference frame relative to the primary reference. The
unit vectors ı,j
, and k of the body-fixed reference frame are not constant, because
they rotate with the body-fixed reference frame.
The position vector of a point P of the rigid body (P ∈(RB)) relative to the origin,
O, of the body-fixed reference frame is the vector r
OP
. The velocity of P relative to
O is
dr
OP
dt
= v
rel
PO
= ω ×r
OP
,
where
ω is the angular velocity vector of the rigid body.
The position vector of a point A (the point A is not assumed to be a point of the
rigid body, A /∈ (RB)), relative to the origin O
0
of the primary reference frame is,
Fig. 3.1,
r
A
= r
O
+ r,
where
r = r
OA
= x ı + y j + zk
is the position vector of A relative to the origin O, of the body-fixed reference frame,
and x,y, and z are the coordinates of A in terms of the body-fixed reference frame.
The velocity of the point A is the time derivative of the position vector r
A
v
A
=
dr
O
dt
+
dr
dt
= v
O
+ v
rel
AO
= v
O
+
dx
dt
ı + x
dı
dt
+
dy
dt
j
+ y
dj
dt
+
dz
dt
k + z
dk
dt
.
Using Poisson formulas, the total derivative of the position vector r is
dr
dt
=
˙
r = ˙x ı + ˙yj
+ ˙zk + ω ×r.
The velocity of A relative to the body-fixed reference frame is a derivative in the
body-fixed reference frame
v
rel
A(xyz)
=
(xyz)
d r
dt
=
dx
dt
ı +
dy
dt
j
+
dz
dt
k = ˙xı + ˙yj
+ ˙zk. (3.33)
A general formula for the total derivative of a moving vector r may be written as
dr
dt
=
(xyz)
d r
dt
+
ω ×r, (3.34)

52 3 Velocity and Acceleration Analysis
where
dr
dt
=
(0)
d r
dt
is the derivative in the fixed (primary) reference frame (0)
(x
0
y
0
z
0
), and
(xyz)
d r
dt
is the derivative in the rotating (mobile or body-fixed) ref-
erence frame (xyz).
The velocity of the point A relative to the primary reference frame is
v
A
= v
O
+ v
rel
A(xyz)
+ ω ×r. (3.35)
Equation 3.35 expresses the velocity of a point A as the sum of three terms:
• the velocity of a point O of the rigid body;
• the velocity v
rel
A(xyz)
of A relative to the rigid body; and
• the velocity
ω ×r of A relative to O due to the rotation of the rigid body.
The acceleration of the point A relative to the primary reference frame is obtained
by taking the time derivative of Eq. 3.35
a
A
= a
O
+ a
AO
= a
O
+ a
rel
A(xyz)
+ 2ω ×v
rel
A(xyz)
+ α ×r + ω ×(ω ×r), (3.36)
where
a
rel
A(xyz)
=
(xyz)
d
2
r
dt
2
=
d
2
x
dt
2
ı +
d
2
y
dt
2
j +
d
2
z
dt
2
k (3.37)
is the acceleration of A relative to the body-fixed reference frame or relative to the
rigid body. The term
a
cor
A(xyz)
= 2ω ×v
rel
A(xyz)
is called the Coriolis acceleration. The direction of the Coriolis acceleration is ob-
tained by rotating the linear relative velocity v
rel
A(xyz)
through 90
◦
in the direction of
rotation given by
ω.
In the case of planar motion, Eq. 3.36 becomes
a
A
= a
O
+ a
OA
= a
O
+ a
rel
A(xyz)
+ 2ω ×v
rel
A(xyz)
+ α ×r −ω
2
r. (3.38)
The motion of the rigid body (RB) is described relative to the primary reference
frame. The velocity v
A
and the acceleration a
A
of a point A are relative to the pri-
mary reference frame. The terms v
rel
A(xyz)
and a
rel
A(xyz)
are the velocity and acceleration
of point A relative to the body-fixed reference frame, i.e., they are the velocity and
acceleration measured by an observer moving with the rigid body, Fig. 3.2. If A is a
point of the rigid body, A ∈ (RB), v
rel
A(xyz)
= 0 and a
rel
A(xyz)
= 0.
Motion of a Point Relative to a Moving Reference Frame
The velocity and acceleration of an arbitrary point A relative to a point O of a rigid
body, in terms of the body-fixed reference frame, are given by Eqs. 3.35 and 3.36
3.5 Slider-Crank (R-RRT) Mechanism 53
v
A
= v
O
+ v
rel
AO
+ ω ×r
OA
, (3.39)
a
A
= a
O
+ a
rel
AO
+ 2ω ×v
rel
AO
+ α ×r
OA
+ ω ×(ω ×r
OA
). (3.40)
These results apply to any reference frame having a moving origin O and rotating
with angular velocity
ω and angular acceleration α relative to a primary reference
frame (Fig. 3.2). The terms v
A
and a
A
are the velocity and acceleration of an ar-
bitrary point A relative to the primary reference frame. The terms v
rel
AO
and a
rel
AO
are
the velocity and acceleration of A relative to the secondary moving reference frame,
i.e., they are the velocity and acceleration measured by an observer moving with the
secondary reference frame. The Coriolis acceleration is a
cor
AO
= 2ω ×v
rel
AO
.
3.5 Slider-Crank (R-RRT) Mechanism
Exercise
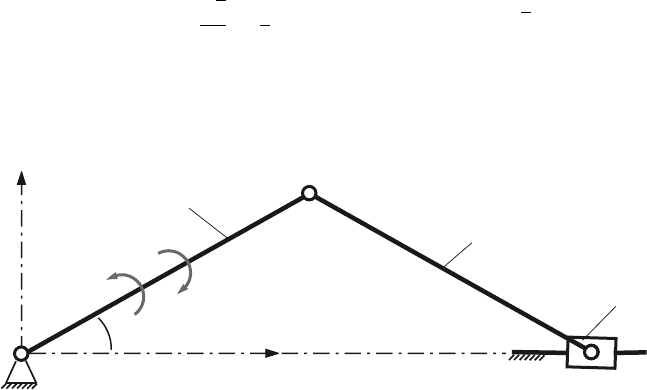
The R-RRT (slider-crank) mechanism shown in Fig. 3.3 has the dimensions: AB =
1 m and BC = 1 m. When the driver link 1 makes an angle φ = φ
1
= π/6 rad with
the horizontal axis the instantaneous speed and the angular acceleration of the link
1 are ω=1 rad/s and α=–1 rad/s
2
.
Find the velocities and the accelerations of the joints and the angular velocities
and accelerations of the links for the given driver-link angle.
Solution
The point A is selected as the origin of the xyz reference frame. The position vectors
of the joints B and C are:
r
B
= x
B
ı + y
B
j =
√
3
2
ı +
1
2
j
m and r
C
= x
C
ı + y
C
j =
√
3ı + 0 j m.
The MATLAB
R
statements for the positions of the mechanism are:
AB=1; BC=1;
1
A
B
C
2
3
x
φ
y
ω
1
α
1
Fig. 3.3 Slider-crank (R-RRT) mechanism