Comon H. etc. Tree Automata Techniques and Applications
Подождите немного. Документ загружается.


3.6 Bibliographic Notes 111
which do not share variables in [DT90], for shallow systems in [Com95], for right
linear monadic rewrite systems [Sal88], for linear semi-monadic rewrite systems
[CG90], also called (with slight differences) growing systems in [Jac96]. Grow-
ing systems are the currently most general class for which the preservation of
recognizability is known.
As already pointed out, the decidability of the encompassment theory implies
the decidability of ground reducibility. There are several papers written along
these lines which will be explained in the next chapter.
Finally, approximations of the reachable terms are computed in [Gen97]
using tree automata techniques, which implies the decision of some safety prop-
erties.
3.6.7 Other applications
The relationship between finite tree automata and higher-order matching is
studied in [CJ97b].
Finite tree automata are also used in logic programming [FSVY91], type
reconstruction [Tiu92] and automated deduction [GMW97].
For further applications of tree automata in the direction of program verifi-
cation, see e.g. chapter 5 of this book or e.g. [Jon87].
TATA — November 18, 2008 —
Chapter 4
Automata with Constraints
4.1 Introduction
A typical example of a language which is not recognized by a finite tree au-
tomaton is the set of terms {f (t, t) | t ∈ T (F)}, i.e. the set of ground instances
of the term f(x, x). The reason is that the two sons of the ro ot are recognized
independently and only a fixed finite amount of information can be carried up
to the root position, whereas t may be arbitrarily large. Therefore, as seen
in the application section of the previous chapter, this imposes some linearity
conditions, typically when automata techniques are applied to rewrite systems
or to sort constraints. The shift from linear to non linear situations can also be
seen as a generalization from tree automata to DAG (directed acyclic graphs)
automata. This is the purpose of the present chapter: how is it possible to
extend the definitions of tree automata in order to carry over the applications
of the previous chapter to (some) non-linear situations?
Such an extension has been studied in the early 80’s by M. Dauchet and J.
Mongy. They define a class of automata which (when working in a top-down
fashion) allow duplications. Considering bottom-up automata, this amounts to
check equalities between subtrees. This yields the RATEG class. This class
is not closed under complement. If we consider its closure, we get the class
of automata with equality and disequality constraints. This class is studied in
Section 4.2.
Unfortunately, the emptiness problem is undecidable for the class RATEG
(and hence for automata with equality and disequality constraints).
Several decidable subclasses have been studied in the literature. The most
remarkable ones are:
• The class of automata with constraints between brothers which, roughly,
allows equality (or disequality) tests only between positions with the same
ancestors. For instance, the above set of terms f(t, t) is recognized by such
an automaton. This class is interesting because most important properties
of tree automata (Boolean closure and decision results) carry over this
extension and hence most of the applications of tree automata can be
extended, replacing linearity conditions with corresponding restrictions
on non-linearities.
We study this class in Section 4.3.
TATA — November 18, 2008 —
114 Automata with Constraints
• The class of reduction automata which, roughly, allows arbitrary disequal-
ity constraints but only a fixed finite amount of equality constraints on
each run of the automaton. For instance the above set of terms f(t, t) also
belongs to this class, since recognizing the terms of this set requires only
one equality test, performed at the top position. Though closure prop-
erties have to be handled with care (with the definition sketched above,
the closure by complement is unknown for this class), reduction automata
are interesting because for example the set of irreducible terms (w.r.t. an
arbitrary, p ossibly non-linear rewrite system) is recognized by a reduction
automaton. Then the decidability of ground reducibility is a direct con-
sequence of emptiness decidability for deterministic reduction automata.
There is also a logical counterpart: the reducibility theory which is pre-
sented in the linear case in the previous chapter and which can be shown
decidable in the general case using a similar technique.
Reduction automata are studied in Section 4.4.
4.2 Automata with Equality and Disequality Con-
straints
4.2.1 The Most General Class
An equality constraint (resp. a disequality constraint) is a predicate on
T (F) written π = π
′
(resp. π 6= π
′
) where π, π
′
∈ {1, . . . , k}
∗
. Such a predicate
is satisfied on a term t, which we write t |= π = π
′
, if π, π
′
∈ Pos(t) and t|
π
= t|
π
′
(resp. π 6= π
′
is satisfied on t if π = π
′
is not satisfied on t).
The satisfaction relation |= is extended as usual to any Boolean combination
of equality and disequality constraints. The empty conjunction and disjunction
are respectively written ⊤ (true) and ⊥ (false).
Example 4.2.1. With the above definition, we have: f (a, f(a, b)) |= 1 = 21,
and f(a, b) |= 1 6= 2.
An automaton with equality and disequality constraints [is a tuple
(Q, F, Q
f
, ∆) where F is a finite ranked alphabet, Q is a finite set of states, Q
f
is a subset of Q of final states and ∆ is a set of transition rules of of the form:
f(q
1
, . . . , q
n
)
c
−→ q
where f ∈ F, q
1
, . . . , q
n
, q ∈ Q, and c is a Boolean combination of equality
(and disequality) constraints. The state q is called target state in the above
transition rule. We write for short AWEDC the class of automata with equality
and disequality constraints.
Let A = (Q, F, Q
f
, ∆) ∈ AWEDC. The move relation →
A
is defined us-
ing the satisfaction of equality and disequality constraints: let t, t
′
∈ T (F ∪
Q), then t →
A
t
′
if and only there is a context C ∈ C(F ∪ Q), some terms
u
1
, . . . , u
n
∈ T (F), and a transition rule f(q
1
, . . . , q
n
)
c
−→ q ∈ ∆, such that
t = C[f(q
1
(u
1
), . . . , q
n
(u
n
)], t
′
= C[q(f (u
1
, . . . , u
n
))] and f(u
1
, . . . , u
n
) |= c.
TATA — November 18, 2008 —
4.2 Automata with Equality and Disequality Constraints 115
We denote
∗
→
A
the reflexive and transitive closure of →
A
. As in Chapter 1, we
usually write t
∗
→
A
q instead of t
∗
→
A
q(t).
An automaton A ∈ AWEDC accepts (or recognizes) a ground term t ∈
T (F) if t
∗
→
A
q for some state q ∈ Q
f
. More generally, we also say that A accepts
t in state q iff t
∗
→
A
q (acceptance by A is the particular case of acceptance by
A in a final state).
The language accepted, or recognized, by an automaton A ∈ AWEDC
is the set L(A) of terms t ∈ T (F) that are accepted by A. The set of terms
t ∈ T (F) that are accepted by A in state q is denoted L(A, q).
A run is a mapping ρ from Pos(t) into ∆ such that if t(p) = f and the
target state of ρ(p) is q, then there is a transition rule f(q
1
, . . . , q
n
)
c
−→ q in ∆
such that for all 1 ≤ i ≤ n, the target state of ρ(pi) is q
i
and t|
p
|= c.
Note that we do not have here exactly the same definition of a run as in
Chapter 1: instead of the state, we keep also the rule which yielded this state.
This will be useful in the design of an emptiness decision algorithm for tree
automata with equality and disequality constraints.
Example 4.2.2. Balanced complete binary trees over the alphabet f (binary)
and a (constant) are recognized by the AWEDC ({q}, {f, a}, {q}, ∆) where ∆
consists of the following rules:
r
1
: a → q
r
2
: f (q, q)
1=2
−−→ q
For example, t = f(f(a, a), f(a, a)) is accepted. The mapping which associates
r
1
to every position p of t such that t(p) = a and which associates r
2
to every
position p of t such that t(p) = f is indeed a success ful run: for every position
p of t such that t(p) = f, t|
p·1
= t
p·2
, hence t|
p
|= 1 = 2.
Example 4.2.3. Consider the following AWEDC: (Q, F, Q
f
, ∆) with F =
{0, s, f} where 0 is a constant, s is unary and f has arity 4, Q = {q
n
, q
0
, q
f
},
Q
f
= {q
f
}, and ∆ consists of the following rules:
0 → q
0
s(q
0
) → q
n
s(q
n
) → q
n
f(q
0
, q
0
, q
n
, q
n
)
3=4
−−→ q
f
f(q
0
, q
0
, q
0
, q
0
) → q
f
f(q
0
, q
n
, q
0
, q
n
)
2=4
−−→ q
f
f(q
f
, q
n
, q
n
, q
n
)
14=4∧21=12∧131=3
−−−−−−−−−−−−−→ q
f
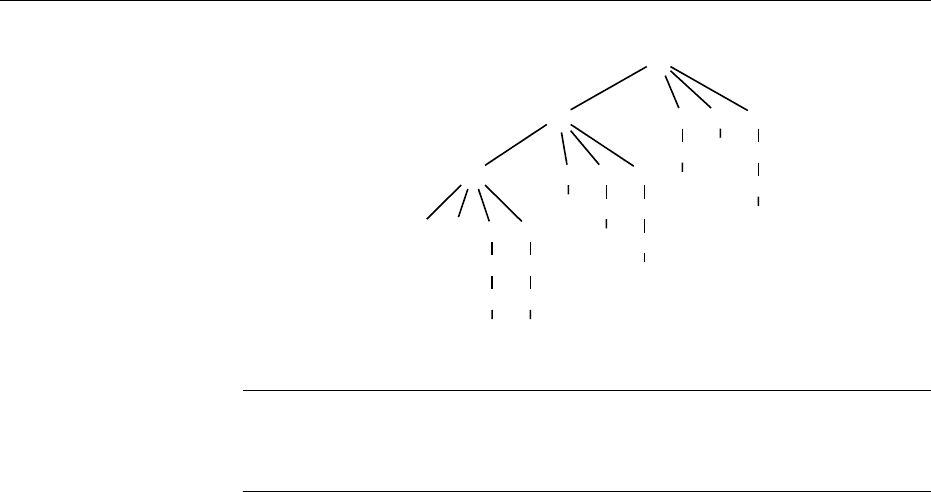
This automaton computes the sum of two natural numbers written in base
one in the following sense: if t is accepted by A then
1
t = f(t
1
, s
n
(0), s
m
(0), s
n+m
(0))
for some t
1
and n, m ≥ 0. Conversely, for each n, m ≥ 0, there is a term
f(t
1
, s
n
(0), s
m
(0), s
n+m
(0)) which is accepted by the automaton.
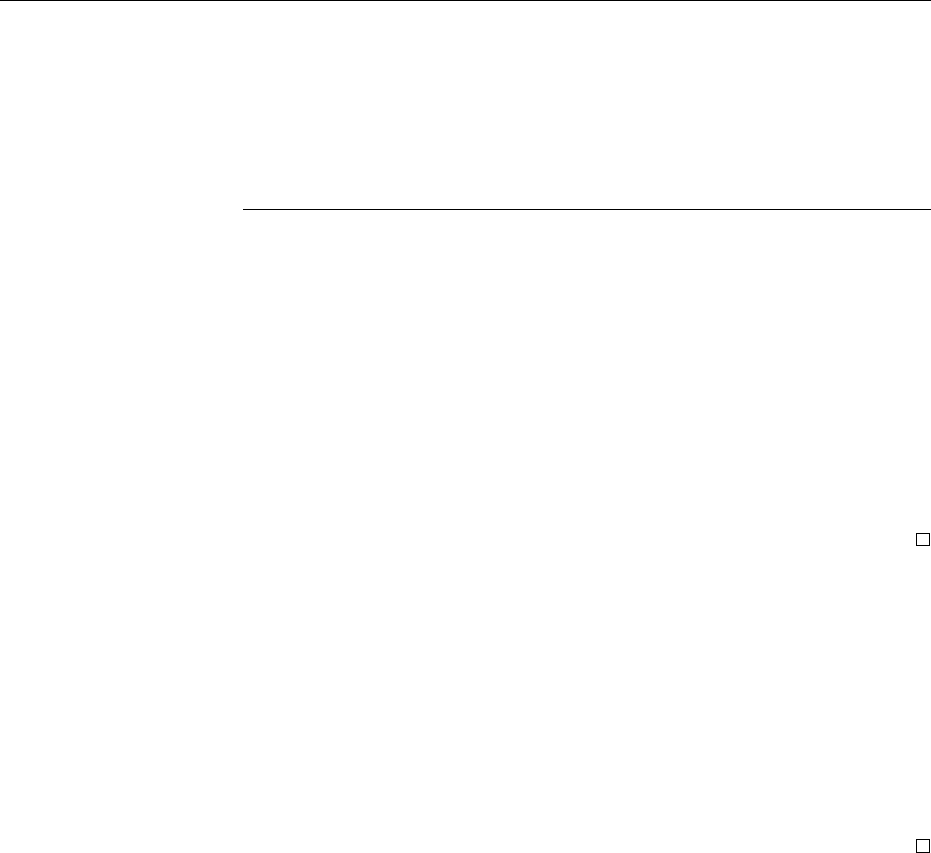
For instance the term depicted on Figure 4.1 is accepted by the automaton.
Similarly, it is possible to design an automaton of the class AWEDC which
1
s
n
(0) denotes s(. . . s
|
{z }
n
(0)
TATA — November 18, 2008 —
116 Automata with Constraints
f
f
f
0 0 s
s
s
0
s
s
s
0
s
0
s
s
0
s
s
s
0
s
s
0
s
0
s
s
s
0
Figure 4.1: A computation of the sum of two natural numbers
“computes the multiplication” (see exercises)
Complexity Measures
In order to evaluate the complexity of operations on automata of the class
AWEDC, we need to precise a representation of the automata and estimate the
space which is necessary for this representation.
The size of a Boolean combination of equality and disequality constraints
is defined by induction:
• kπ = π
′
k
def
= kπ 6= π
′
k
def
= |π| + |π
′
| (|π| is the length of π)
• kc ∧ c
′
k
def
= kc ∨ c
′
k
def
= kck + kc
′
k + 1
• k¬ck
def
= kck
Now, the complexity of deciding whether t |= c depends on the representation
of t. If t is represented as a directed acyclic graph (a DAG) with maximal
sharing, then this can be decided in O(kck) on a RAM. Otherwise, it requires
to compute first this representation of t, and hence can be computed in time at
most O(ktk log ktk + kck).
From now on, we assume, for complexity analysis, that the terms are rep-
resented with maximal sharing in such a way that checking an equality or a
disequality constraint on t can be completed in a time which is independent of
ktk.
The size of an automaton A ∈ AWEDC is
kAk
def
= |Q| +
X
f(q
1
,...,q
n
)
c
−→ q∈∆
n + 2 + kck
TATA — November 18, 2008 —

4.2 Automata with Equality and Disequality Constraints 117
Determinism
An automaton A in AWEDC is deterministic if for every t ∈ T (F), there is
at most one state q such that t
∗
−→
A
q. It is complete if for every t ∈ T (F)
there is at least one state q such that t
∗
−→
A
q.
When every constraint is a tautology, then our definition of automata re-
duces to the definition of Chapter 1. However, in such a case, the notions of
determinacy do not fully coincide, as noticed in Chapter 1, page 23.
4.2.2 Reducing Non-determinism and Closure Properties
Proposition 4.2.4. For every automaton A ∈ AWEDC, there is a complete
automaton A
′
which accepts the same language as A. The size kA
′
k is poly-
nomial in kAk and the computation of A
′
can be performed in polynomial time
(for a fixed alphabet). If A is deterministic, then A
′
is deterministic.
Proof. The proof is similar as for Theorem 1.1.7: we add a trash state q
⊥
and
every appropriate transition to the trash state. However, we need to be careful
concerning the constraints of the computed transitions in order to preserve the
determinism.
The additional transitions are computed as follows: for each function symbol
f ∈ F and each tuple of states (including the trash state) q
1
, . . . , q
n
, if there is no
transition f (q
1
, . . . , q
n
)
c
−→ q ∈ ∆, then we simply add the rule f(q
1
, . . . , q
n
) →
q
⊥
to ∆. Otherwise, let f (q
1
, . . . , q
n
)
c
i
−→ s
i
(i = 1, . . . , m) be all rules in ∆
whose left member is f(q
1
, . . . , q
n
). We add the rule f (q
1
, . . . , q
n
)
c
′
−→ q
⊥
to ∆,
where c
′
def
= ¬
m
_
i=1
c
i
.
Example 4.2.5. In order to complete the AWEDC of Example 4.2.2, we add
the following transitions:
f(q, q)
16=2
−−→ q
⊥
f(q
⊥
, q) → q
⊥
f(q, q
⊥
) → q
⊥
f(q
⊥
, q
⊥
) → q
⊥
Note that the AWEDC obtained is deterministic.
Proposition 4.2.6. For every automaton A ∈ AWEDC, there is a determin-
istic automaton A
′
which accepts the same language as A. The size kA
′
k is
exponential in kAk and A
′
can be computed in exponential time. If A is com-
plete, t hen A
′
is complete.
Proof. The construction is the same as in Theorem 1.1.9: states of A
′
are sets
of states of A. Final states of A
′
are those sets which contain at least one final
state of A. The construction time complexity as well as the size A
′
are also of
the same magnitude as in Theorem 1.1.9. The only difference is the computation
of the constraints in transition rules: if S
1
, . . . , S
n
, S are sets of states, in the
TATA — November 18, 2008 —

118 Automata with Constraints
deterministic automaton, the rule f(S
1
, . . . , S
n
)
c
−→ S is labeled by a constraint
c defined by:
c
def
=
^
q∈S
_
f(q
1
,...,q
n
)
c
r
−→ q∈∆
q
i
∈S
i
, i≤n
c
r
∧
^
q /∈S
^
f(q
1
,...,q
n
)
c
r
−→ q∈∆
q
i
∈S
i
, i≤n
¬c
r
Let us prove that a term t is accepted by A in states q
1
, . . . , q
k
(and no other
states) if and only if t is accepted by A
′
in the state {q
1
, . . . , q
k
}:
Direction ⇒. Assume that t
n
i
−→
A
q
i
(i.e. t
∗
−→
A
q
i
in n
i
steps), for i = 1, . . . , k.
We prove, by induction on n = max(n
1
, . . . , n
k
), that
t
n
−−→
A
′
{q
1
, . . . , q
k
}.
If n = 1, then t is a constant and t → S is a rule of A
′
where S =
{q | a −→
A
q}.
Assume now that n > 1. Let, for each i = 1, . . . , k,
t = f(t
1
, . . . , t
p
)
m
i
−−→
A
f(q
i
1
, . . . , q
i
p
) −→
A
q
i
and let f(q
i
1
, . . . , q
i
p
)
c
i
−→ q
i
be a rule of A such that t |= c
i
. By induction
hypothesis, each term t
j
is accepted by A
′
in the states of a set S
j
⊇ {q
1
j
, . . . , q
k
j
}.
Moreover, by definition of S = {q
1
, . . . , q
k
}, if t
∗
−→
A
q
′
then q
′
∈ S. Therefore,
for every transition rule of A f(q
′
1
, . . . , q
′
p
)
c
′
−→ q
′
such that q
′
/∈ S and q
j
∈ S
j
for every j ≤ p, we have t 6|= c
′
. Then t satisfies the above defined constraint c.
Direction ⇐. Assume that t
n
−−→
A
′
S. We prove by induction on n that, for
every q ∈ S, and for no other state of A, t
n
−→
A
q.
If n = 1, then S is the set of states q such that t −→
A
q, hence the proper ty.
Assume now that:
t = f(t
1
, . . . , t
p
)
n
−−→
A
′
f(S
1
, . . . , S
p
) −−→
A
′
S.
Let f(S
1
, . . . , S
p
)
c
−→ S be the last rule used in this reduction. Then t |= c
and, by definition of c, for every state q ∈ S, there is a rule f(q
1
, . . . , q
n
)
c
r
−→ q
of A such that q
i
∈ S
i
for every i ≤ n and t |= c
r
. By induction hypoth-
esis, for each i, t
i
m
i
−−→
A
′
S
i
implies t
i
m
i
−−→
A
q
i
(for some m
i
< n) and hence
t
n
−→
A
f(q
1
, . . . , q
p
) −→
A
q.
Let q /∈ S and assume that t
∗
−→
A
q and that the last step in this reduction
uses the transition rule f(q
1
, . . . , q
n
)
c
r
−→ q. By induction hypothesis, every
q
i
∈ S
i
(for i ≤ n). Hence, by definition of the constraint c, t 6|= c, and it
contradicts t
∗
−−→
A
′
S.
TATA — November 18, 2008 —
4.2 Automata with Equality and Disequality Constraints 119
Thus, by construction of the final states set, a ground term t is accepted by
A
′
iff t is accepted by A.
Now, we have to prove that A
′
is deterministic indeed. Assume that t
∗
−−→
A
′
S
and t
∗
−−→
A
′
S
′
. Assume moreover that S 6= S
′
and that t is the smallest term (in
size) recognized in two different states. Then there exists S
1
, . . . , S
n
such that
t
∗
−−→
A
′
f(S
1
, . . . , S
n
) and such that f (S
1
, . . . , S
n
)
c
−→ S and f(S
1
, . . . , S
n
)
c
′
−→ S
′
are transition rules of A
′
, with t |= c and t |= c
′
. By symmetry, we may assume
that there is a state q ∈ S such that q /∈ S
′
. Then, by construction of A
′
,
there are some states q
i
∈ S
i
, for every i ≤ n, and a rule f(q
1
, . . . , q
n
)
c
r
−→ q
of A where c
r
occurs positively in c, and is therefore satisfied by t, t |= c
r
. By
construction of the constraint of A
′
, c
r
must occur negatively in the second part
of (the conjunction) c
′
. Therefore, t |= c
′
contradicts t |= c
r
.
Example 4.2.7. Consider the following automaton on the alphabet F = {a, f}
where a is a constant and f is a binary symbol: Q = {q, q
⊥
}, Q
f
= {q} and ∆
contains the following rules:
a → q f (q, q)
1=2
−−→ q f(q, q) → q
⊥
f(q
⊥
, q) → q
⊥
f(q, q
⊥
) → q
⊥
f(q
⊥
, q
⊥
) → q
⊥
This complete (and non-deterministic) automaton accepts the same languages as
the automaton of Example 4.2.2. Then the deterministic automaton computed
as in the previous proposition is given by:
a → {q} f({q}, {q})
1=2∧⊥
−−−−−→ {q}
f({q}, {q})
1=2
−−→ {q, q
⊥
} f({q}, {q})
16=2
−−→ {q
⊥
}
f({q}, {q
⊥
}) → {q
⊥
} f({q
⊥
}, {q}) → {q
⊥
}
f({q
⊥
}, {q
⊥
}) → {q
⊥
} f({q, q
⊥
}, {q})
1=2∧⊥
−−−−−→ {q}
f({q, q
⊥
}, {q})
1=2
−−→ {q, q
⊥
} f({q, q
⊥
}, {q
⊥
}) −→ {q
⊥
}
f({q, q
⊥
}, {q, q
⊥
})
1=2
−−→ {q, q
⊥
} f({q, q
⊥
}, {q})
16=2
−−→ {q
⊥
}
f({q}, {q, q
⊥
})
1=2
−−→ {q, q
⊥
} f({q}, {q, q
⊥
})
16=2
−−→ {q
⊥
}
f({q, q
⊥
}, {q})
16=2
−−→ {q
⊥
} f({q}, {q, q
⊥
})
1=2∧⊥
−−−−−→ {q}
f({q, q
⊥
}, {q, q
⊥
})
1=2∧⊥
−−−−−→ {q} f({q
⊥
}, {q, q
⊥
}) −→ {q
⊥
}
For instance, the constraint 1=2∧⊥ is obtained by the conjunction of the label
of f (q, q)
1=2
−−→ q and the negation of the constraint labelling f(q, q) −→ q
⊥
,
(which is ⊤).
Some of the constraints, such as 1=2∧⊥ are uns atisfiable, hence the corre-
sponding rules can be removed. If we finally rename the two accepting states
{q} and {q, q
⊥
} into a single state q
f
(this is possible since by replacing one
of these states by the other in any left hand side of a transition rule, we get
TATA — November 18, 2008 —
120 Automata with Constraints
another transition rule), then we get a simplified version of the deterministic
automaton:
a → q
f
f(q
⊥
, q
f
) → q
⊥
f(q
f
, q
f
)
1=2
−−→ q
f
f(q
f
, q
⊥
) → q
⊥
f(q
f
, q
f
)
16=2
−−→ q
⊥
f(q
⊥
, q
⊥
) → q
⊥
Proposition 4.2.8. The class AWEDC is effectively closed by all Boolean op-
erations. Union requires linear time, intersection requires quadratic time and
complement requires exponential time. The respective sizes of the AWEDC ob-
tained by these construction are of the same magnitude as the time complexity.
Proof. The proof of this prop osition can be obtained from the proof of The-
orem 1.3.1 (Chapter 1, pages 30–31) with straightforward modifications. The
only difference lies in the product automaton for the intersection: we have to
consider conjunctions of constraints. More precisely, if we have two AWEDC
A
1
= (Q
1
, F, Q
f1
, ∆
1
) and A
1
= (Q
2
, F, Q
f2
, ∆
2
), we construct an AWEDC
A = (Q
1
× Q
2
, F, Q
f1
× Q
f2
, ∆) such that if f(q
1
, . . . , q
n
)
c
−→ q ∈ ∆
1
and
f(q
′
1
, . . . , q
′
n
)
c
′
−→ q
′
∈ ∆
2
, then f((q
1
, q
′
1
), . . . , (q
n
, q
′
n
))
c∧c
′
−−−→ (q, q
′
) ∈ ∆. The
AWEDC A recognizes L(A
1
) ∩ L(A
2
).
4.2.3 Decision Problems
Membership
Proposition 4.2.9. Given t ∈ T (F) and A ∈AWEDC, deciding whether t is
accepted by A can be completed in polynomial time (linear time for a determin-
istic aut omaton).
Proof. Because of the DAG representation of t, the satisfaction of a constraint
π = π
′
on t can be completed in time O(|π| + |π
′
|). Thus, if A is determinis-
tic, the membership test can be performed in time O(ktk + kAk + MC ) where
MC = max(kck
c is a constraint of a rule of A). If A is nondeterministic, the
complexity of the algorithm will be O(ktk × kAk × MC ).
Undecidability of Emptiness
Theorem 4.2.10. The emptiness problem for AWEDC is undecidable.
Proof. We reduce the Post Correspondence Problem (PCP). If w
1
, . . . , w
n
and
w
′
1
, . . . , w
′
n
are the word sequences of the PCP problem over the alphabet {a, b},
we let F contain h (ternary), a, b (unary) and 0 (constant). Lets recall that the
answer for the above instance of the PCP is a sequence i
1
, . . . , i
p
(which may
contain some repetitions) such that w
i
1
. . . w
i
p
= w
′
i
1
. . . w
′
i
p
.
If w ∈ {a, b}
∗
, w = a
1
. . . a
k
and t ∈ T (F), we write w(t) the term a
1
(. . . (a
k
(t)) . . .) ∈
T (F).
Now, we construct A = (Q, F, Q
f
, ∆) ∈ AWEDC as follows:
• Q contains a state q
v
for each prefix v of one of the words w
i
, w
′
i
(including
q
w
i
and q
w
′
i
as well as 3 extra states: q
0
, q and q
f
. We assume that a and
b are both prefix of at least one of the words w
i
, w
′
i
. Q
f
= {q
f
}.
TATA — November 18, 2008 —