Casing/Tubing design manual october 2005 Chevron
Подождите немного. Документ загружается.


D.1 Introduction
The purpose of this appendix is to introduce most of the equations necessary to
the study the response of a tubular structure to external loads. The majority of
the discussion will be centered on axisymmetric deformation of a thick cylinder.
However, because of their importance to tubular design, the necessary
approximations leading to the equations for a thin cylinder will also be discussed.
Not covered here are the specific relations for stability type failures. These
relations will be detailed in the discussions of collapse and column stability.
Although every effort was made to ensure that the forthcoming derivations are
complete and self-contained, it is presumed that the reader has a background in
such basic concepts as stress and strain. Other terms falling outside the scope of
an introductory level course in mechanics of materials will be explained at the
time they are introduced.
Due to the geometric shape of oil field tubulars, all analyses will be carried out in
cylindrical (
r ,
θ
, ) coordinates. z
D.2 Strain-Displacement Relations
In the analysis of any solid body, three concepts are of paramount concern –
stress, strain, and the constitution of the material that permits one to relate stress
and strain. Both stress and strain are independent of the material constitution:
• Stress, regardless of the material being studied, is strictly determined by
the applied loads.
• Strain is strictly concerned with the kinematics of the deformation.
The character of the material being studied only appears when one relates stress
(loading) to strain (response) via appropriate constitutive equations.
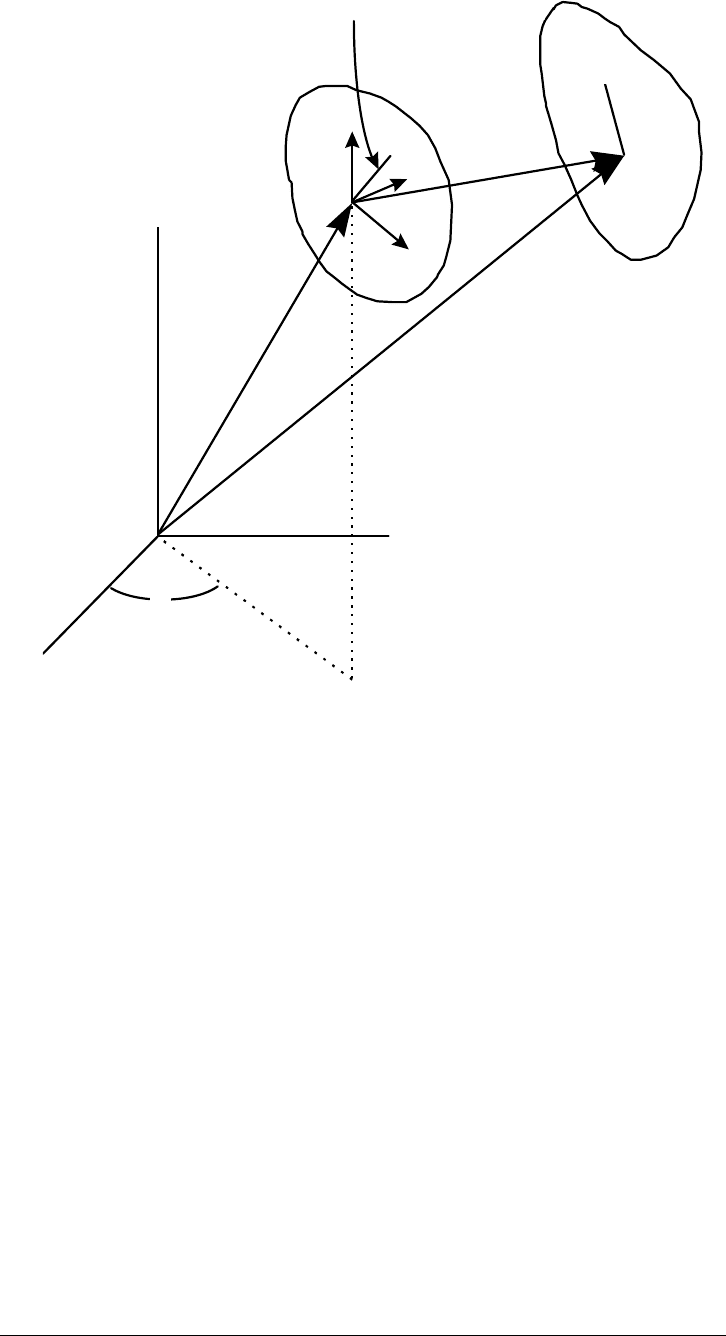
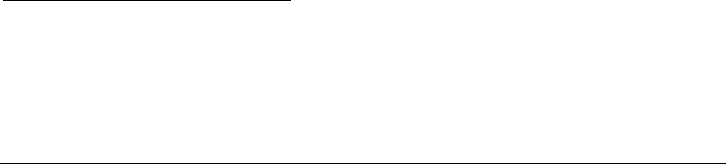
Figure D-1 depicts the translation, rotation, and deformation of a body in
response to some unknown set of applied forces. We desire to develop a general
expression for the local deformation at any point in the body. In particular,
consider an infinitesimal line element bounded by Points 1 and 2. Because of
deformation, Point 1 in the original configuration will be displaced to Point 1' in
the deformed configuration. The position vector,
, of the deformed location of
Point 1 can be written:
s
~
'
z
z
r
r
isisiss
~~~~
''''
+
+
=
θ
θ
(D-1)
D-2 Casing/Tubing Design Manual
October 2005
2
2’
1
1’
ds’
ds
Z
Undeformed
Configuration
Deformed
Configuration
Y
r
X
θ
s
~
s’
~
u
~
i
~z
i
~r
i
~θ
Figure D-1. Deformation of an Infinitesimal Line Element
or, alternately,
ssu
sui sui
sui
rr
r
zz
z
~~~
~~
~
'
()()
()
=
+
=+ ++
++
θθ
θ
(D-2)
where is the original position of Point 1, is the displacement at Point 1, and
, , are unit vectors in the ,
s
~
u
~
i
r
~
i
~
θ
i
z
~
r
θ
, directions, respectively, the unit
vectors being referenced to the original, undeformed configuration.
z
An infinitesimal line segment,
, in the undeformed configuration will, because
of applied loads, be translated, rotated, and deformed into an infinitesimal line
segment,
, in the deformed configuration. For example, the segment 1-2 in
Figure D-1 will be transformed into the segment 1'-2'. Our concern is to arrive at
a description of the transformation from segment 1-2 to segment 1'-2' that
isolates the portion of the motion because of deformation of the segment and
ignores the rigid body terms (i.e., translation and rotation). This local description
of material distortion is the essence of the concept of strain.
ds
ds'
Casing/Tubing Design Manual D-3
October 2005
Quantitatively, strain is defined as the change
1
( )
ds'
2
-( )
ds
2
where is the
magnitude of
and
ds
is the magnitude of [Eringen, 1967]. From equation
(D-2),
ds'
ds
~
' ds
~
ds ds du
~~
'
~
=
+
(D-3)
where,
ds ds i ds i ds i
dr i rd i dz i
r
r
z
z
rz
~~~
~~
=++
=+ +
θ
θ
θ
θ
~
~
(D-4)
and, by straightforward differentiation,
du
u
r
dr
u
d
u
z
dz i
u
r
dr
u
d
u
z
dz i
u
r
dr
u
d
u
z
dz i
u
i
du
i
d
rr r
r
zz z
z
r
r
~~
~
~
~
~
=++
⎛
⎝
⎜
⎞
⎠
⎟
+++
⎛
⎝
⎜
⎞
⎠
⎟
+++
⎛
⎝
⎜
⎞
⎠
⎟
++
∂
∂
∂
∂θ
θ
∂
∂
∂
∂
∂
∂θ
θ
∂
∂
∂
∂
∂
∂θ
θ
∂
∂
∂
∂θ
θ
∂
∂θ
θ
θθ θ
θ
θ
θ
(D-5)
The derivatives of the unit vectors are given by,
∂
∂θ
∂
∂θ
θ
θ
i
i
i
i
r
r
~
~
~
~
,==−
(D-6)
using equations (D-4) through (D-6) in (D-3), the strain measure can be written,
() ()
()
(
)
(
)
()
()
()
ds ds ds ds ds
ds ds ds
u
r
dr
u
ud
u
z
dz
u
r
dr r
u
ud
u
z
dz
u
r
dr
u
d
u
z
rz
rz
rr r
r
zz z
′
−= + +
−++
⎡
⎣
⎢
⎤
⎦
⎥
=+
⎛
⎝
⎜
⎞
⎠
⎟
+−
⎛
⎝
⎜
⎞
⎠
⎟
+
⎡
⎣
⎢
⎤
⎦
⎥
++++
⎛
⎝
⎜
⎞
⎠
⎟
+
⎡
⎣
⎢
⎤
⎦
⎥
++++
⎛
⎝
⎜
⎞
⎠
⎟
22
222
2
2
2
2
2
1
1
'''
θ
θ
θ
θθ θ
∂
∂
∂
∂θ
θ
∂
∂
∂
∂
∂
∂θ
θ
∂
∂
∂
∂
∂
∂θ
θ
∂
∂
() ( ) ()
[]
dz
dr r d dz
⎡
⎣
⎢
⎤
⎦
⎥
−+ +
2
2
2
22
θ
(D-7)
1
If (ds')
2
-(ds)
2
vanishes everywhere within the body, no local distortion has occurred and
the transformation from segment 1-2 to segment 1'-2' can be expressed as a rigid body
motion consisting of a translation of any point P in the body plus a rotation about an axis
passing through point P. The measure of strain given here thus fulfills the requirement of
isolating the portion of motion due solely to deformation of the segment.
D-4 Casing/Tubing Design Manual
October 2005

Multiplying and collecting terms in equation (D-7) leads to a simple, but lengthy,
expression. However, if it is assumed that all of the displacements and
displacement gradients (
∂
∂
ur
r
, etc.) are small, then higher order terms in these
quantities may be neglected, and equation (D-7) becomes:
() () ()
()
()
ds ds
u
r
dr
u
rr
u
rd
u
z
dz
u
rr
u
u
r
rdrd
u
r
u
z
drdz
u
zr
u
rdzd
rr
z
rz
z
′
−= ++
⎛
⎝
⎜
⎞
⎠
⎟
+
++−
⎛
⎝
⎜
⎞
⎠
⎟
++
⎛
⎝
⎜
⎞
⎠
⎟
++
⎛
⎝
⎜
⎞
⎠
⎟
22 2
2
2
22
1
2
2
1
2
2
1
∂
∂
∂
∂θ
θ
∂
∂
∂
∂
∂
∂θ
θ
∂
∂
∂
∂
∂
∂
∂
∂θ
θ
θ
θθ
θ
r
θ
(D-8)
The coefficients of the differential products in equation (D-8) have been given
special names and represent the components of strain. Introducing the strain
components in the conventional manner through the expression:
() () ()
()
()
ds ds dr rd dz
rdrd drdz rdzd
rz
rrzz
′
−= + +
+++
22 2
2
2
22 2
444
εεθε
εθε ε
θ
θθ
(D-9)
One can, by comparing equations (D-8) and (D-9), arrive at the definitions:
ε
∂
∂
ε
∂
∂θ
ε
∂
∂
εε
∂
∂
∂
∂θ
εε
∂
∂
∂
∂
εε
∂
∂
∂
∂θ
θ
θ
θθ
θθ
θθ
θ
r
rr
z
z
rr
r
rz zr
zr
zz
z
u
r
u
rr
u
u
z
u
rr
u
u
r
u
r
u
z
u
zr
u
==+ =
== + −
⎛
⎝
⎜
⎞
⎠
⎟
== +
⎛
⎝
⎜
⎞
⎠
⎟
== +
⎛
⎝
⎜
⎞
⎠
⎟
,,
,
,
,
.
1
1
2
1
1
2
1
2
1
(D-10)
D.2.1 Special Cases
Within the confines of the assumption of infinitesimal displacements and
displacement gradients, the expressions for the components of strain given in
equation D-10 are completely general. However, there exist special displacement
fields having wide application in tubular problems for which the strain-
displacement relations assume simpler forms.
D.2.1.1 Axisymmetric Deformation
If the deformation is symmetric with respect to the -axis (taken to correspond
with the axis of the tube), then the displacement field is independent of
z
θ
implying:
∂
∂θ
∂
∂θ
∂
∂θ
θ
u
u
u
r
===0
z
(D-11)
Casing/Tubing Design Manual D-5
October 2005

Furthermore, u
θ
=
0, so that the simplified strain-displacement relations for the
case of axisymmetric deformation become:
ε
∂
∂
ε
∂
∂
ε
∂
∂
∂
∂
εεε
θθθ
r
r
z
z
rz
zr
r
rz
u
r
u
z
u
r
u
z
u
r
== =+
⎛
⎝
⎜
⎞
⎠
⎟
===
,,
,.
1
2
0
,
(D-12)
D.2.1.2 Plane Strain
For this simplification, the displacement field is independent of the -coordinate: z
∂
∂
∂
∂
∂
∂
θ
u
z
u
z
u
z
r
===0
z
(D-13)
Furthermore,
, so that the simplified expressions for the strain components
become:
u
z
= 0
ε
∂
∂
ε
∂
∂θ
ε
∂
∂
∂
∂θ
εε ε
θ
θ
θ
θθ
θ
r
rr
r
r
zrz z
u
r
u
rr
uu
rr
u
u
r
==+ =+−
⎛
⎝
⎜
⎞
⎠
⎟
===
,,
.
11
2
1
0
,
(D-14)
D.2.2 Physical Interpretation of Strain
Components
The derivation of the strain components given in the previous section is
mathematically clean and straightforward. However, by employing such a general
approach, one is likely to lose sight of the physical meaning of the components of
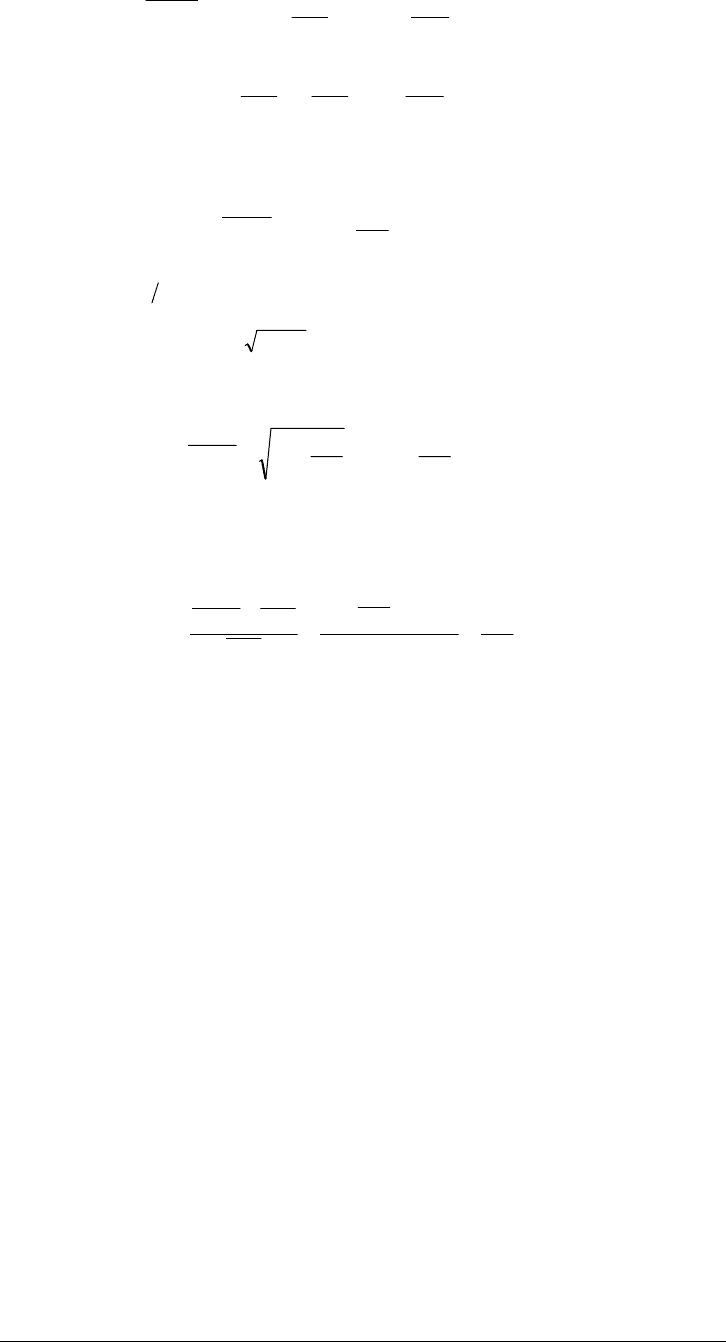
the strain tensor. In order to gain more insight into the concept of strain, consider
Figure D-2. The figure is drawn for the case of plane strain (
u
z
=
0 ), but this two-
dimensional deformation should be sufficient to display the necessary concepts.
Consider first a differential line segment 1-2 initially lying along a radius that,
because of some unknown external loading, translates, rotates, and deforms (in
this case, stretches) to become the line segment 1'-2' (Figure D-2.a). Let us
calculate the change in length of this line segment. Removing the translation,
which does not affect deformation, the deformed configuration can be
superimposed on the undeformed configuration as shown in Figure D-2.b. During
deformation, Point 1 will displace a distance
in the direction and a distance
in the
u
r
r
u
θ
θ
direction. Point 2 will displace a distance u
u
r
dr
r
r
+
∂
∂
in the
direction and a distance
r
u
u
r
dr
θ
θ
∂
∂
+ in the
θ
direction. As indicated in the figure,
the relative displacement of Point 2 (as compared to Point 1) in the
direction is
therefore
r
∂
∂
u
r
dr
r
. In a similar manner, the relative displacement of Point 2 in the
θ
direction is
∂
∂
θ
u
r
dr . The length of the line segment 1'-2' can now be calculated
as:
D-6 Casing/Tubing Design Manual
October 2005
()
2
2
2
2
2
2
21
21
dr
r
u
r
u
r
u
dr
r
u
dr
r
u
dr
rr
r
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
++=
⎟
⎠
⎞
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
+=
′
−
′
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
θ
θ
(D-15)
Ignoring the higher order terms in the displacement gradients,
()
′
−
′
=+
⎛
⎝
⎜
⎞
⎠
⎟
12 12
2
2
∂
∂
u
r
dr
r
(D-16)
Finally, since
∂
ur
r
<< 1, the binomial approximation,
12 1 1+≅+ <<aaa,
(D-17)
can be used to find the length of 1' to 2',
′
−
′
=+ ≅+
⎛
⎝
⎜
⎞
⎠
⎟
12 12 1
∂
∂
∂
∂
u
r
dr
u
r
dr
rr
(D-18)
Now recalling the familiar definition of extensional strain as change in length
divided by original length,
ε
∂
∂
∂
∂
r
r
r
u
r
dr dr
dr
u
r
=
′
−
′
−−
−
=
+
⎛
⎝
⎜
⎞
⎠
⎟
−
=
1212
12
1
(D-19)
and
ε
r
can now be interpreted as the change in length per original length of a
line segment initially lying along the
direction. In a similar manner, r
ε
θ
can be
shown to represent the change in length per original length of a line segment
initially lying along the
θ
or circumferential direction.
Casing/Tubing Design Manual D-7
October 2005
Y
X
r
θ
4
dθ
3
2
1
4
3
2
1,1’
4’
2’
3’
3’
4’
1’
2’
γ
2
γ
1
∂
u
r
/
∂
r dr
∂
u
θ
/
∂
r dr
dr
a. Displacement of 1-2-3-4 b. Rigid body motion removed
Figure D-2. Physical Interpretation of Strain Components
Next, consider the right angle having its vertex at the intersection of arc 1-4 and
line 1-2. After deformation, the change in this right angle is given by
γ
γ
12
+
.
From Figure D-2,
γγ
∂
∂
∂
∂
∂
∂θ
θ
∂
∂θ
θ
θ
θ
θ
12
11
1
1
1
1
+=
+
⎛
⎝
⎜
⎞
⎠
⎟
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
+
+
⎛
⎝
⎜
⎞
⎠
⎟
⎡
⎣
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
−
⎡
⎣
⎢
⎤
⎦
⎥
−−
−
tan tan
tan
u
r
dr
u
r
dr
u
d
r
u
rd
u
r
r
r
(D-20)
where the term
[
tan
−1
ur
θ
]
takes into account the fact that even if u is constant,
the curvature of the differential element will contribute a change in the angles
θ
γ
1
and
γ
2
2
. Further, since the displacement gradients are small compared to unity,
we can write:
γγ
∂
∂
∂
∂θ
∂
∂
∂
∂θ
θθ
θθ
r
r
r
u
rr
u
u
r
u
rr
u
u
r
+≅
⎡
⎣
⎢
⎤
⎦
⎥
+
⎡
⎣
⎢
⎤
⎦
⎥
−
⎡
⎣
⎢
⎤
⎦
⎥
≅+ −
−−
2
11 1
1
1
tan tan tan
(D-21)
2
The origin of this term is related to the change in the unit vector
i
in equation (D-6).
~
θ
D-8 Casing/Tubing Design Manual
October 2005

where the last step made use of the small angle approximation, tan
θ
θ
≅ .
Comparing equations (D-21) and (D-10),
(
)
εε
θθ
r
=
r
is seen to be one-half of the
angle change between two perpendicular lines initially lying along the
and r
θ
coordinate directions.
D.3 Stress and Equilibrium
The counterpart to strain, the measure of the deformation experienced by a
material, is stress, the imposed load causing the deformation. Two types of loads
or forces will be considered here: surface forces, or tractions, and body forces.
For these two types of loads, the load intensity can be defined respectively in
terms of the stress vector,
, and the body force vector,
σ
~
χ
~
,
σ
~
~
lim=
→
∑
F
A
A
i
∆
∆ 0
(D-22)
χ
χ
~
~
lim=
→
∑
i
V
V
∆
∆ 0
(D-23)
In other words, the stress vector,
, is a measure of the local intensity of contact
forces acting on the surface of a body, and is determined by taking the limit of the
resultant contact force,
σ
~
FF
i
~~
=
∑
, acting on a small area
∆
A as the dimensions
of the area become infinitesimal. In a similar vein, the body force vector,
χ
~
, is a
measure of the volumetric intensity of field forces acting on an infinitesimal
volume element
3
.
D.3.1 Decomposition of the Stress Vector
For reasons that will become apparent shortly, it is usually not convenient to work
with the stress vector. Rather, common practice is to decompose the stress into
nine components roughly corresponding to the components of strain (i.e., a
σ
θ
r
stress will result in an
ε
θ
r
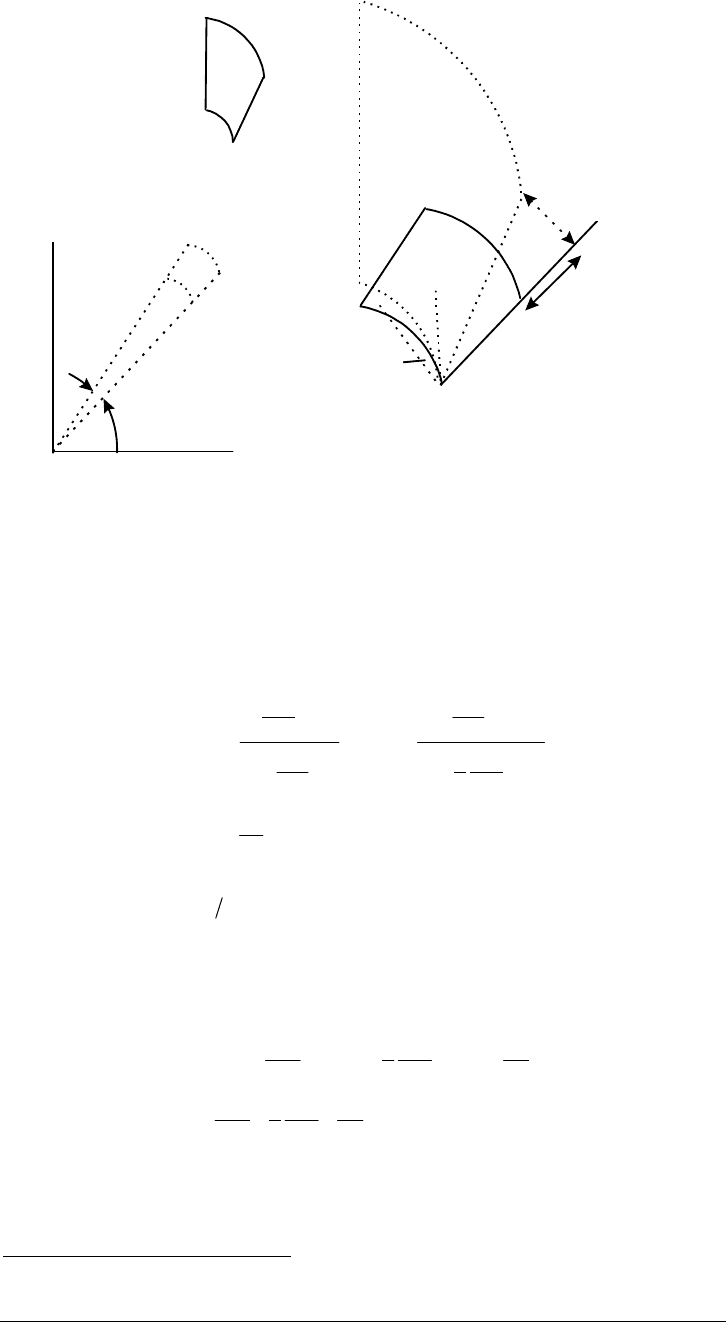
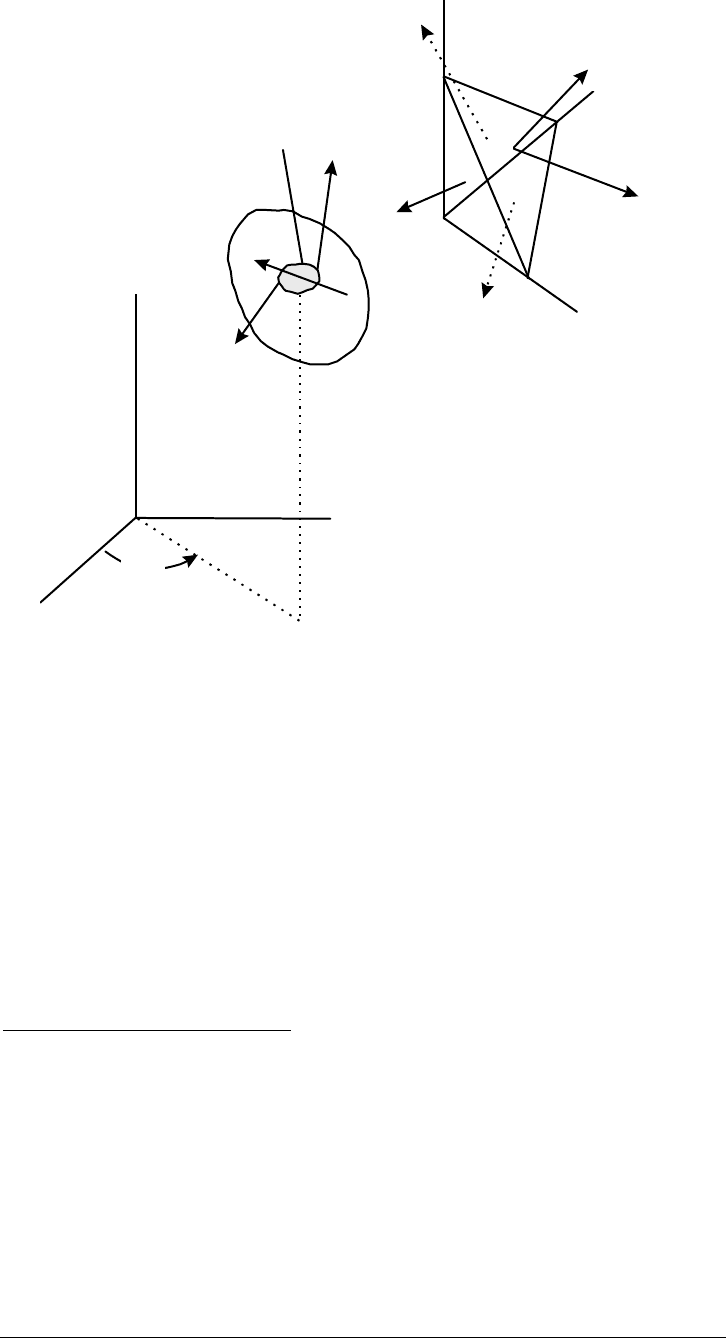
strain). In order to formally introduce the components
of stress, consider Figure D-3. The left-hand drawing in Figure D-3 shows a body
B subjected to contact forces such as to place the body in static equilibrium. Only
the surface tractions acting on surface element
∆
A have been shown in order to
avoid cluttering the figure. The right-hand drawing in Figure D-3 is an expanded
view of the area
∆
A and a portion of the body interior to the surface
∆
A. Internal
stress vectors
, , and , acting on the respective coordinate faces, when
combined with the external surface traction,
, render the differential body
σ
~
r
σ
θ
~
σ
~
z
σ
~
3
Although the complexion of the body force vector can be quite involved, the only body
force to be considered here will be that due to the earth's gravitational field.
Casing/Tubing Design Manual D-9
October 2005
element in equilibrium (along with the body force vector
χ
~
not shown). However,
overall vector force equilibrium insists that there also be equilibrium in each of
the three independent coordinate directions. Therefore, it is convenient to
decompose the stress vectors on the coordinate faces,
σ
σ
σ
σ
σσ σ σ
σσ σ σ
θ
θ
θ
θθ
θ
θ
θ
θ
rr
r
rrz
z
r
r
z
z
z
zr
r
zz
z
iii
ii i
iii
~
~~~
~
~~ ~
~
~~~
,
,
.
=
+
+
=++
=++
(D-24)
Using equation (D-24) and noting that
4
:
∆∆
∆
∆
∆
∆
AAnAAnAAn
rr z
=
z
=
=
,,
θθ
(D-25)
where
n is a unit vector normal to the area
~
∆
A
, the condition that all force
components acting in the
-direction vanish results in: r
−− − ++⋅
⎛
⎝
⎜
⎞
⎠
⎟
=
σσ σ χσ
θθ
rr r zrz r
An An An V i A∆∆∆∆ ∆
1
0
~
~
(D-26)
with similar expressions holding for the
θ
and -coordinate directions. Factoring
∆
A and noting that the body force enters the expression as a higher order term,
equation (D-26) can be written:
z
σσσ σ
θθ
~
~
⋅= + +inn
r
rr r zrz
n
(D-27)
where
σ
~
~
⋅i
r
is the component of the external stress vector . Similar
developments along the remaining coordinate directions lead to:
r
σσ σσ
θ
θθθθ
~
~
⋅= + +inn
rr zz
n
n
(D-28)
σσ σ σ
θθ
~
~
⋅= + +inn
z
rz r z z z
(D-29)
~
4
Consider the area vector . Because the
tetrahedron of Figure D-3 is a closed surface, we must have
, where
∆∆ ∆A An Ani ni ni
r
r
z
z
~ ~ ~~~
== ++
⎛
⎝
⎜
⎞
⎠
⎟
θ
θ
∆∆ ∆ ∆AA A A
rz
~~ ~ ~
+++ =
θ
0
∆
∆
AA
r
r
r
~~
i
=
−
, etc., which leads immediately to
equation (D-25).
D-10 Casing/Tubing Design Manual
October 2005
X
Y
r
θ
z
Z
B
F
1
F
2
F
1
σ
z
~
σ
θ
~
σ
r
~
F
3
∆A
θ
∆A
B
σ
~
B
r
z
θ
n
~
σ = F/∆A = (F
1
+ F
2
+ F
3
) / ∆A
~ ~ ~ ~ ~
Figure D-3. Stresses and the Stress Vector
D.3.2 The Equilibrium Equations
Although the introduction of the components of stress is facilitated by considering
a portion of the body adjacent to its surface, the equilibrium equations can be
most easily derived by considering an interior volume element
5
. Examine Figure
D-4 which shows an interior differential element of B whose sides have been
chosen to align with the coordinate directions. According to the normal sign
convention, all of the stress components shown in the figure are positive. For the
body B to be in static equilibrium, each and every differential element in the body
must be in force and moment equilibrium in each of the three coordinate
directions. For example, in the
-direction, force equilibrium is expressed as r
5
A more straightforward derivation of the equilibrium equations can be performed by
noting that for global equilibrium of the body in Figure D-3,
σχ
~
~
dA dV
AV
∫∫
+=0.
Transforming the area integral to a volume integral by means of the Gauss theorem and
requiring that the resultant integrand on the left-hand side of the equation vanish for all
portions of the body leads directly to the equations of equilibrium (D-34), (D-36) and (D-
37). However, the manipulations associated with application of the Gauss theorem
necessitate the introduction of the gradient operator in cylindrical coordinates, an
unnecessary complication to the scope of this summary. A similar procedure could also
be used to discuss moment equilibrium.
Casing/Tubing Design Manual D-11
October 2005