Brizard A. An Introduction to Lagrangian Mechanics
Подождите немного. Документ загружается.

5.6. HARD-SPHERE AND SOFT-SPHERE SCATTERING 95
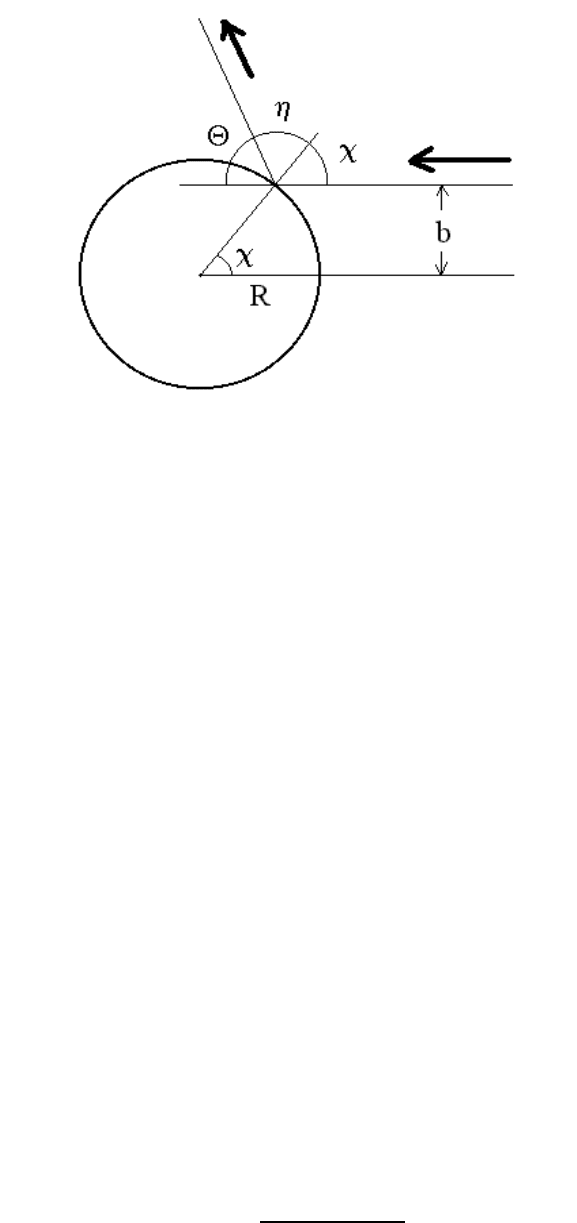
Figure 5.6: Hard-sphere scattering geometry
5.6.1 Hard-Sphere Scattering
We begin by considering the collision of a point-like particle of mass m
1
with a hard sphere
of mass m
2
and radius R. In this particular case, the central potential for the hard sphere
is
U(r)=
∞ (for r<R)
0 (for r>R)
and the collision is shown in Figure 5.6. From Figure 5.6, we see that the impact parameter
is
b = R sin χ, (5.28)
where χ is the angle of incidence. The angle of reflection η is different from the angle of
incidence χ for the case of arbitrary mass ratio α = m
1
/m
2
. To show this, we decompose
the velocities in terms of components p erpendicular and tangential to the surface of the
sphere at the point of impact, i.e., we respectively find
αu cos χ = v
2
− αv
1
cos η
αu sin χ = αv
1
sin η.
From these expressions we obtain
tan η =
αu sin χ
v
2
−αu cos χ
.
96 CHAPTER 5. COLLISIONS AND SCATTERING THEORY
From Figure 5.6, we also find the deflection angle θ = π − (χ + η) and the recoil angle
ϕ = χ and thus, according to Chap. 5,
v
2
=
2 α
1+α
u cos χ,
and thus
tan η =
1+α
1 − α
tan χ. (5.29)
We, therefore, easily see that η = χ (the standard form of the Law of Reflection) only if
α = 0 (i.e., the target particle is infinitely massive).
In the CM frame, the collision is symmetric with a deflection angle χ =
1
2
(π − Θ), so
that
b = R sin χ = R cos
Θ
2
.
The scattering cross section in the CM frame is
σ
0
(Θ) =
b(Θ)
sin Θ
db(Θ)
dΘ
=
R cos(Θ/2)
sin Θ
·
−
R
2
sin(Θ/2)
=
R
2
4
, (5.30)
and the total cross section is
σ
T
=2π
Z
π
0
σ
0
(Θ) sin Θ dΘ=πR
2
, (5.31)
i.e., the total cross section for the problem of hard-sphere collision is equal to the effective
area of the sphere.
The scattering cross section in the LAB frame can also be obtained for the case α<1
using Eqs. (5.17) and (5.22) as
σ(θ)=
R
2
4
2 α cos θ +
1+α
2
cos 2θ
√
1 − α
2
sin
2
θ
!
, (5.32)
for α = m
1
/m
2
< 1. The integration of this formula must yield the total cross section
σ
T
=2π
Z
π
0
σ(θ) sin θdθ,
where θ
max
= π for α<1.
5.6.2 Soft-Sphere Scattering
We now consider the scattering of a particle subjected to the attractive potential considered
in Sec. 4.5
U(r)=
− U
0
(for r<R)
0 (for r>R
(5.33)
5.6. HARD-SPHERE AND SOFT-SPHERE SCATTERING 97
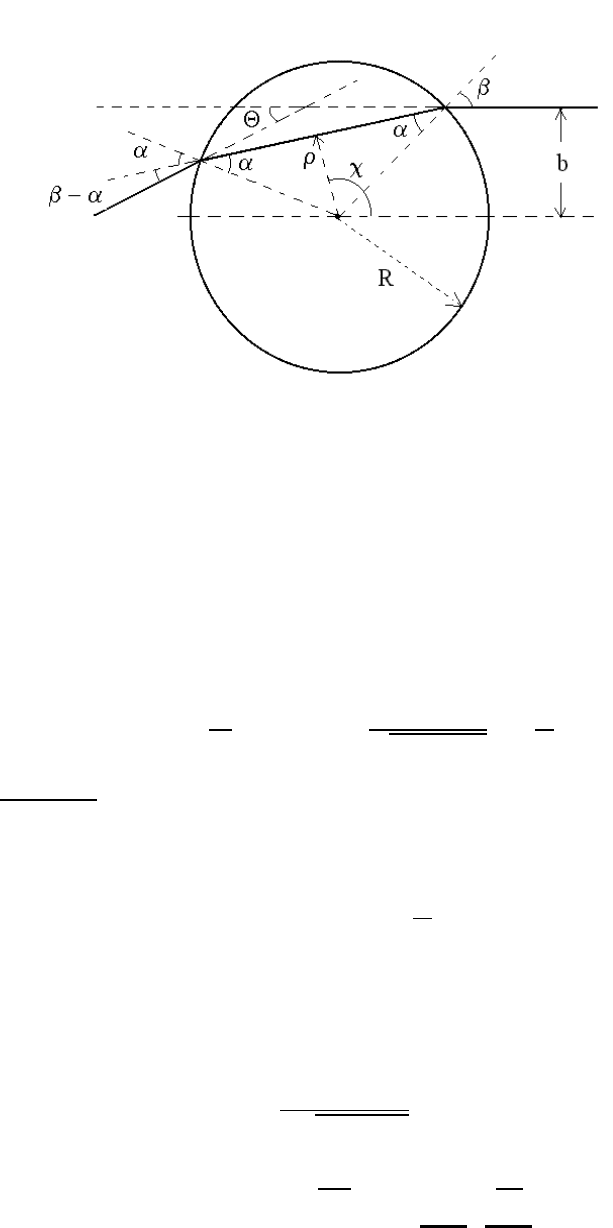
Figure 5.7: Soft-sphere scattering geometry
where the constant U
0
denotes the depth of the attractive potential well and E>`
2
/2µR
2
involves a single turning point. We denote β the angle at which the incoming particle enters
the soft-sphere potential (see Figure 5.7), and thus the impact parameter b of the incoming
particle is b = R sin β. The particle enters the soft-sphere potential region (r<R) and
reaches a distance of closest approach ρ, defined from the turning-point condition
E = −U
0
+ E
b
2
ρ
2
→ ρ =
b
q
1+U
0
/E
=
R
n
sin β,
where n =
q
1+U
0
/E denotes the index of refraction of the soft-sphere potential region.
From Figure 5.7, we note that an optical analogy helps us determine that, through Snell’s
law, we find
sin β = n sin
β −
Θ
2
, (5.34)
where the transmission angle α is given in terms of the incident angle β and the CM
scattering angle −ΘasΘ=2(β − α).
The distance of closest approach is reached at an angle χ is determined as
χ = β +
Z
R
ρ
bdr
r
√
n
2
r
2
− b
2
= β + arccos
b
nR
!
− arccos
b
nρ
!
| {z }
=0
98 CHAPTER 5. COLLISIONS AND SCATTERING THEORY
= β + arccos
b
nR
!
=
1
2
(π +Θ), (5.35)
and, thus, the impact parameter b(Θ) can be expressed as
b(Θ) = nR sin
β(b) −
Θ
2
→ b(Θ) =
nR sin(Θ/2)
q
1+n
2
− 2n cos(Θ/2)
, (5.36)
and its derivative with respect to Θ yields
db
dΘ
=
nR
2
[n cos(Θ/2) − 1] [n − cos(Θ/2)]
[1 + n
2
− 2n cos(Θ/2)]
3/2
,
and the scattering cross section in the CM frame is
σ
0
(Θ) =
b(Θ)
sin Θ
db(Θ)
dΘ
=
n
2
R
2
4
|[n cos(Θ/2) −1] [n − cos(Θ/2)]|
cos(Θ/2) [1 + n
2
− 2n cos(Θ/2)]
2
.
Note that, on the one hand, when β =0,wefindχ = π/2andΘ
min
= 0, while on the other
hand, when β = π/2, we find b = R and
1=n sin
π
2
−
Θ
max
2
= n cos(Θ
max
/2) → Θ
max
= 2 arccos
n
−1
.
Moreover, when Θ = Θ
max
, we find that db/dΘ vanishes and, therefore, the differential
cross section vanishes σ
0
(Θ
max
) = 0, while at Θ = 0, we find σ
0
(0) = [n/(n − 1)]
2
(R
2
/4).
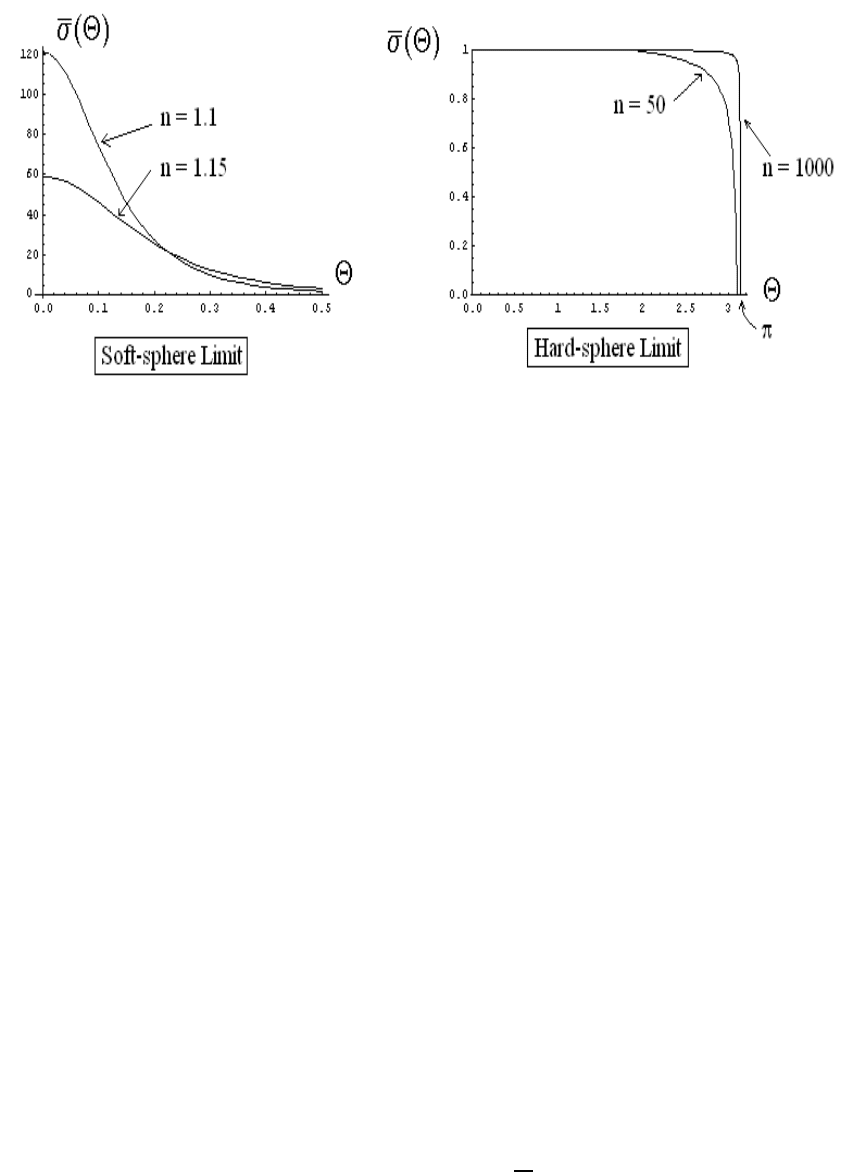
Figure 5.8 shows the soft-sphere scattering cross section σ(Θ) (normalized to the hard-
sphere cross section R
2
/4) as a function of Θ for four cases: n =(1.1, 1.15) in the soft-sphere
limit (n → 1) and n = (50, 1000) in the hard-sphere limit (n →∞). We clearly see the
strong forward-scattering behavior as n → 1 (or U
0
→ 0) in the soft-sphere limit and the
hard-sphere limit σ → 1asn →∞. We note that the total scattering cross section (using
the substitution x = n cos Θ/2)
σ
T
=2π
Z
Θ
max
0
σ
0
(Θ) sin Θ dΘ=2πR
2
Z
n
1
(x − 1) (n
2
− x) dx
(1 + n
2
− 2x)
2
= πR
2
is independent of the index of refraction n and equals the hard-sphere total cross section
(5.31).
The opposite case of a repulsive soft-sphere p otential, where −U
0
is replaced with U
0
in
Eq. (5.33), is treated by replacing n =(1+U
0
/E)
1
2
with n =(1−U
0
/E)
−
1
2
and Eq. (5.36)
is replaced with
b(Θ) = n
−1
R sin
β(b)+
Θ
2
→ b(Θ) =
R sin(Θ/2)
q
1+n
2
− 2n cos(Θ/2)
, (5.37)
while Snell’s law (5.34) is replaced with
sin
β +
Θ
2
= n sin β.
5.7. PROBLEMS 99
Figure 5.8: Soft-sphere scattering cross-section
5.7 Problems
Problem 1
(a) Using the conservation laws of energy and momentum, solve for v
1
(u, θ; β), where
β = m
2
/m
1
and
u
1
= u
b
x
v
1
= v
1
(cos θ
b
x + sin θ
b
y)
v
2
= v
2
(cos ϕ
b
x − sin ϕ
b
y)
(b) Discuss the number of physical solutions for v
1
(u, θ; β) for β<1 and β>1.
(c) For β<1, show that physical solutions for v
1
(u, θ; β) exist for θ<arcsin(β)=θ
max
.
Problem 2
Show that the momentum transfer ∆p
0
1
= q
0
1
− p
0
1
of the projectile particle in the CM
frame has a magnitude
|∆p
0
1
| =2µu sin
Θ
2
,
where µ, u, and Θ are the reduced mass, initial projectile LAB speed, and CM scattering
100 CHAPTER 5. COLLISIONS AND SCATTERING THEORY
angle, respectively.
Problem 3
Show that the differential cross section σ
0
(Θ) for the elastic scattering of a particle of
mass m from the repulsive central-force potential U(r)=k/r
2
with a fixed force-center at
r = 0 (or an infinitely massive target particle) is
σ
0
(Θ) =
2π
2
k
mu
2
(π − Θ)
[Θ (2π − Θ)]
2
sin Θ
,
where u is the sp eed of the incoming projectile particle at r = ∞.
Hint : Show that b(Θ) =
r
0
(π − Θ)
√
2π Θ − Θ
2
, where r
2
0
=
2 k
mu
2
.
Problem 4
By using the relations tan θ = sin Θ/(α + cos Θ) and/or sin(Θ − θ)=α sin θ, where
α = m
1
/m
2
, show that the relation between the differential cross section in the CM frame,
σ
0
(Θ), and the differential cross section in the LAB frame, σ(θ), is
σ
0
(Θ) = σ( θ) ·
1+α cos Θ
(1 + 2 α cos Θ + α
2
)
3/2
.
Problem 5
Consider the scattering of a particle of mass m by the localized attractive central po-
tential
U(r)=
−kr
2
/2 r ≤ R
0 r>R
where the radius R denotes the range of the interaction.
(a) Show that for a particle of energy E>0 moving towards the center of attraction with
impact parameter b = R sin β, the distance of closest approach ρ for this problem is
ρ =
s
E
k
(e − 1), where e =
s
1+
2 kb
2
E
5.7. PROBLEMS 101
(b) Show that the angle χ at closest approach is
χ = β +
Z
R
ρ
(b/r
2
) dr
q
1 − b
2
/r
2
+ kr
2
/2E
= β +
1
2
arccos
2 sin
2
β − 1
e
!
(c) Using the relation χ =
1
2
(π + Θ) between χ and the CM scattering angle Θ, show that
e =
cos 2β
cos(2β − Θ)
< 1
102 CHAPTER 5. COLLISIONS AND SCATTERING THEORY

Chapter 6
Motion in a Non-Inertial Frame
A reference frame is said to be an inertial frame if the motion of particles in that frame is
subject only to physical forces (i.e., forces are derivable from a physical potential U such
that m
¨
x = −∇U). The Principle of Galilean Relativity states that the laws of physics are
the same in all inertial frames and that all reference frames moving at constant velocity
with resp ect to an inertial frame are also inertial frames. Hence, physical accelerations are
identical in all inertial frames.
In contrast, a reference frame is said to be a non-inertial frame if the motion of particles
in that frame of reference violates the Principle of Galilean Relativity. Such non-inertial
frames include all rotating frames and accelerated reference frames.
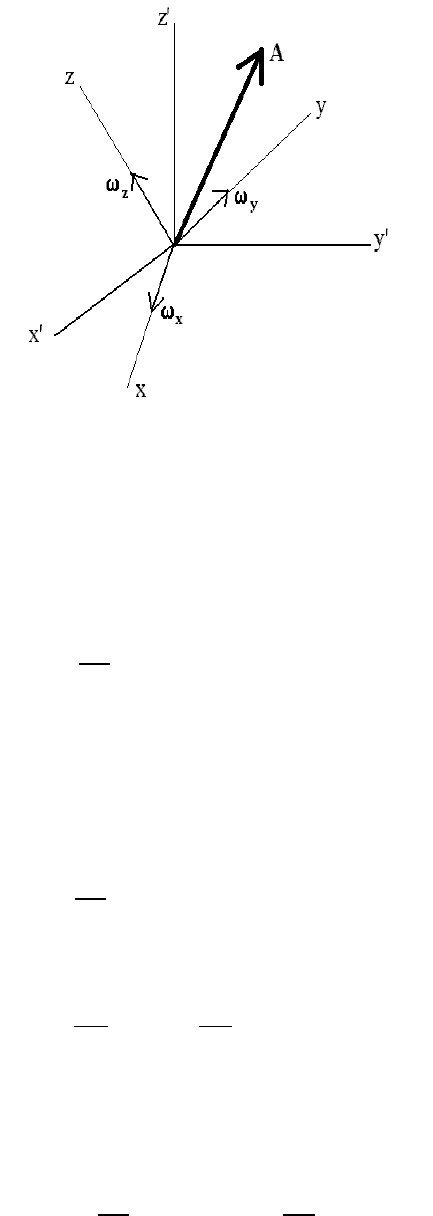
6.1 Time Derivatives in Fixed and Rotating Frames
To investigate the relationship between inertial and non-inertial frames, we consider the
time derivative of an arbitrary vector A in two reference frames. The first reference frame
is called the fixed (inertial) frame and is expressed in terms of the Cartesian coordinates
r
0
=(x
0
,y
0
,z
0
). The second reference frame is called the rotating (non-inertial) frame and
is expressed in terms of the Cartesian coordinates r =(x, y, z). In Figure 6.1, the rotating
frame shares the same origin as the fixed frame and the rotation angular velocity ω of the
rotating frame (with respect to the fixed frame) has components (ω
x
,ω
y
,ω
z
).
Since observations can also be made in a rotating frame of reference, we decomp ose the
vector A in terms of components A
i
in the rotating frame (with unit vectors
b
x
i
). Thus,
A = A
i
b
x
i
(using the summation rule) and the time derivative of A as observed in the fixed
frame is
dA
dt
=
dA
i
dt
b
x
i
+ A
i
d
b
x
i
dt
. (6.1)
The interpretation of the first term is that of the time derivative of A as observed in the
103
104 CHAPTER 6. MOTION IN A NON-INERTIAL FRAME
Figure 6.1: Rotating and fixed frames
rotating frame (where the unit vectors
b
x
i
are constant) while the second term involves the
time-dependence of the relation between the fixed and rotating frames. We now express
d
b
x
i
/dt as a vector in the rotating frame as
d
b
x
i
dt
= R
ij
b
x
j
=
ijk
ω
k
b
x
j
, (6.2)
where R represents the rotation matrix associated with the rotating frame of reference;
this rotation matrix is anti-symmetric (R
ij
= −R
ji
) and can be written in terms of the
anti-symmetric tensor
ijk
(defined in terms of the vector product A × B = A
i
B
j
ijk
b
x
k
for
two arbitrary vectors A and B)asR
ij
=
ijk
ω
k
, where ω
k
denotes the components of the
angular velocity ω in the rotating frame. Hence, the second term in Eq. (6.1) becomes
A
i
d
b
x
i
dt
= A
i
ijk
ω
k
b
x
j
= ω × A. (6.3)
The time derivative of an arbitrary rotating-frame vector A in a fixed frame is, therefore,
expressed as
dA
dt
!
f
=
dA
dt
!
r
+ ω × A, (6.4)
where (d/dt)
f
denotes the time derivative as observed in the fixed (f) frame while (d/dt)
r
denotes the time derivative as observed in the rotating (r) frame. An important application
of this formula relates to the time derivative of the rotation angular velocity ω itself. One
can easily see that
dω
dt
!
f
=
˙
ω =
dω
dt
!
r
,