Bolotin Y., Tur A., Yanovsky V. Chaos: Concepts, Control and Constructive Use
Подождите немного. Документ загружается.


24 3 Main Features of Chaotic Systems
i, j = 1,...,n. As points move one away from another, it is expected for chaotic
signals that the statistical connections between them decrease. In terms of the cor-
relation function it means that the average x
i
(t +τ )x
j
(t) for very distant and sta-
tistically unconnected points tends to x
i
x
j
. In physics, this is termed the decay
of correlations.
In other words, the correlation function for statistically unconnected time points
turns to zero. It allows chaotic trajectories to be determined by the drop of the
correlation function with growth of τ . Essentially, this reflects the intuitively clear
property of chaos as the loss of the dependence of quantity values x(t + τ )on
their values x(t) in the preceding moment in time. Now we calculate the correlation
function for the periodic x
i
(t + T) = x
i
(t). Omitting simple transformations, we
give the result
B
ij
(τ ) =
∞
n=−∞
X
i
(ω
n
)X
∗
j
(ω
n
)e
(iω
n
τ )
.
Analagous to the examples above, for aperiodic functions, sum transforms into inte-
gral
B
ij
(τ ) =
∞
−∞
X
i
(ω)X
∗
j
(ω)e
(iωτ )
dω.
For i = j the correlation functions are also called autocorrelation functions. Taking
a Fourier transform of the autocorrelation function on τ it is easy to obtain that
B
ii
(τ ) =
∞
−∞
|X
i
(ω)|
2
e
iωτ
dω. (3.6)
This can be understood recalling that the Fourier transform of a convolution coin-
cides with the product of their Fourier transforms. Now it is clear that the autocor-
relation functions are closely connected with the spectral density S
(
ω
)
.
S(ω) =
1
π
∞
−∞
B(τ )e
−iωτ
dτ.
This connection also determines the physical sense of spectral density S
(
ω
)
. Indeed,
if quantity x(t) is the velocity of motion, then B
ii
(0) is proportional to kinetic energy
and, as follows from the relation (3.6), quantity |X
i
(ω)|
2
represents the energy
density contained in oscillations with the frequencies that belong to the interval
[ω,ω + dω]. Therefore, such spectral density is called the energy spectrum and
it characterizes the quantity of energy concentrated in oscillations with the fre-
quency ω. Thus, we can use spectral densities and correlation functions as criteria
3.3 Lyapunov’s Exponent 25
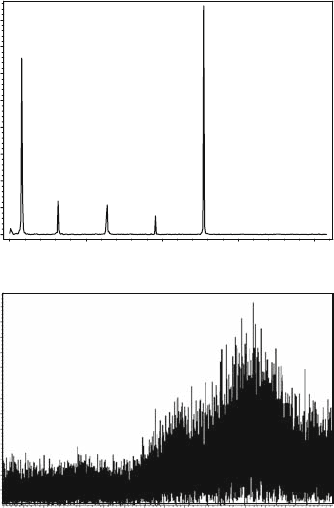
Fig. 3.3 An example of a
typical line spectrum
0
20
40
60
80
100
120
140
S(w)
0
1
2
3
w
Fig. 3.4 A typical example of
the continuous spectrum of a
chaotic signal
S(w)
w
for chaoticity. Spectral densities for chaotic trajectories or signals have continuous
spectra, and for periodic or quasi-periodic – linear ones (see Figs. 3.3 and 3.4). Gen-
erally speaking, correlation functions for chaotic signals fall down exponentially
with growth of τ .
3.3 Lyapunov’s Exponent
One of the commonly used methods of determining the degree of chaoticity is based
on the properties of exponential divergence in chaotic trajectories. This essential
quality has already been discussed. The exponential sensibility of dynamical sys-
tems with chaotic behavior found realization in the determination of the Lyapunov
exponent. This is one of the most popular characteristics or criteria of dynamical
chaos. For one-dimensional systems with discrete time, or cascades, the Lyapunov
exponent was actually introduced before as a characteristic of the divergence of two
trajectories close at t = 0. For continuous one-dimensional systems it is analogously
defined. Let the initial points of two trajectories at t = 0 be situated in distance
|
δx
(
0
)
|
one from another. If the distance between these points
|
δx
(
t
)
|
changes with
time (at t 1) as
|
δx
(
t
)
|
∼
|
δx
(
0
)
|
e
λt
,

26 3 Main Features of Chaotic Systems
then λ is called the Lyapunov exponent. It is clear that in order to find λ we can use
the relation
λ =
1
t
ln
|
δx
(
t
)
|
|
δx
(
0
)
|
, t →∞. (3.7)
In accordance with the above-discussed sensistivity of dynamical systems, at λ>0
errors in determination of initial conditions will lead to the impossibility of predict-
ing system behavior. For generic one-dimensional mappings
x
n+1
= f
(
x
n
)
, (3.8)
the Lyapunov exponent also can be easily introduced. Let the distance between two
points equal δx
n
on the n th time step, i.e. let the points correspond to positions x
n
and x
n
+δx
n
. It is easy to calculate the distance between them in the moment n +1.
Indeed,
x
n+1
+δx
n+1
= f
(
x
n
+δx
n
)
. (3.9)
Assuming them to be close in the moment of time n, we decompose the right-hand
side in the Taylor series over δx
n
x
n+1
+δx
n+1
= f
(
x
n
)
+δx
n
· f
(
x
n
)
+···.
Taking into account the mapping (3.8), and neglecting the nonlinear corrections, we
obtain
δx
n+1
= δx
n
· f
(
x
n
)
. (3.10)
This linear relation clearly states that variation of distance in one iteration step is
determined by the derivative value in the preceding point. Using this simple relation
it is possible to express the distance δx
0
and values of f
(
x
)
along the trajectory
δx
n+1
= δx
0
n
k=0
f
(
x
k
)
. (3.11)
Then the Lyapunov exponent, which characterizes the divergence of the trajectories
|
δx
n
|
=
|
δx
0
|
e
λn
, is defined as
λ = lim
n→∞
1
n
n−1
k=o
ln
f
(
x
k
)
. (3.12)
There are several modifications of this simple formula as well as numerical meth-
ods for determining λ [32, 33]. However, we will discuss below how one can use

3.3 Lyapunov’s Exponent 27
e
1
(1)
e
2
(1)
e
1
(n)
e
2
(n)
Fig. 3.5 Here the trajectory, eigenvectors, and the initial neighborhood surrounding it are shown.
The positions of the neighborhood and the eigenvectors at the moment of time n qualitatively
demonstrate their temporal behavior
the Lyapunov exponent for dynamical systems in multi-dimensional phase space.
Here the situation is less inconsequential than in one-dimensional cases. If we are
interested in the deviation of trajectories from a chosen one in two-dimensional
space, we consider a neighborhood in the phase space which contains a point of
that trajectory. All other points in the neighborhood correspond to other trajectories,
which are close to the chosen one. Let the neighborhood be a circle of radius ε.Itis
clear that if all the points in the neighborhood are shifted according to dynamical law
then after the time period Δt the neighborhood will be shifted in the phase space
and most importantly, it will change its shape. In other words, some trajectories
will approach the chosen one while others will move away from it. These changes
in distance during the time period Δt will depend on the trajectory selected (see
Fig. 3.5). We will demonstrate how to determine the Lyapunov exponent for map-
pings in two-dimensional phase space. Generally, such mappings have the following
form
x
n+1
= f
(
x
n
, y
n
)
y
n+1
= g
(
x
n
, y
n
)
. (3.13)
The position of trajectory in the moment n is conveniently characterized by the
vector or the column
z
n
=
x
n
y
n
.
Let us now consider a vector connecting two close trajectories z
n
and z
n
+ δz
n
,
where
δz
n
=
δx
n
δy
n
.
Using the dynamical law (3.13) and the smallness of δx
n
and δy
n
, we can establish,
as in the one-dimensional example, how δz
n
is changed in one time step. It is easy
to obtain that
δz
n+1
= A
n
·δz
n
, (3.14)
28 3 Main Features of Chaotic Systems
where A
n
is the square 2 ×2 matrix of the following form
A
n
=
∂ f
(
x
n
y
n
)
∂x
n
∂ f
(
x
n
y
n
)
∂y
n
∂g
(
x
n
y
n
)
∂x
n
∂g
(
x
n
y
n
)
∂y
n
. (3.15)
This is usually called the Jacobian matrix. From Eq. (3.14) it is easy to determine
the deviation for n steps
δz
n
= A
n−1
A
n−2
···A
0
·δz
0
≡ Q
n
δz
0
. (3.16)
Thus, the deviation for n time steps is determined by the initial deviation multi-
plied by the matrix Q
n
, depending on n and on the derivatives along the trajectory
of the system. As a natural basis convenient for the decomposition of any vector,
eigenvectors of the matrix Q
n
are usually used:
Q
n
e
i
(
n
)
= ν
i
(
n
)
e
i
(
n
)
, (3.17)
where index i labels the eigenvectors, and in two-dimensional cases i = 1, 2. The
eigenvectors depend on n and can be chosen to be orthonormal, i.e. e
1
·e
2
= 0 , e
1
·
e
1
= e
2
·e
2
= 1. Quantities ν
i
(
n
)
are called the eigen-numbers of the matrix Q
n
and
they also depend on time n. The conditions of solvability for the system of linear
equations (3.17) leads to the characteristic equation for eigenvalues
det
|
Q
n
−ν
(
n
)
I
|
= 0 . (3.18)
Here for convenience we introduce the unity matrix
I =
10
01
.
Solutions of Eq. (3.18) determine the eigenvalues of the matrix Q
n
. Any vector or
deviation can be now conveniently written in the basis of eigenvectors e
i
(
n
)
. Initial
deviation in that basis takes the form
δz
0
=
i
a
i
e
i
(
n
)
, (3.19)
where a
i
are coordinates of the initial deviation in the basis
(
e
1
, e
2
)
. Then the devi-
ationonthenth time step is easily obtained from (3.16) in the new basis
δz
n
= Q
n
i
a
i
e
i
(
n
)
=
a
i
ν
i
(
n
)
e
i
(
n
)
. (3.20)
Thus, ν
i
(
n
)
characterize the variation of the deviation coordinates (in the new basis)
along ith direction, determined by the eigenvector e
i
(
n
)
.

3.3 Lyapunov’s Exponent 29
Let us now introduce the Lyapunov exponents along those directions, i.e.
ν
i
(
n
)
∼ e
λ
i
n
at sufficiently large n. Then they are found to be
λ
i
= lim
n→∞
ln ν
i
(
n
)
n
.
As in two-dimensional cases, there are two directions determined by e
i
, and two
Lyapunov exponents appear; these can be positive as well as negative. Let us dis-
cuss the limitations on these exponents that arise in dynamical systems. For that
purpose we consider a small rectangular neighborhood with sides that coincide with
the vectors a
1
e
1
and a
2
e
2
[see (3.19)]. The initial area of the rectangle is ω
0
= a
1
a
2
.
Now let us consider how its area changes after n iterations according to dynamical
law (3.13) or (3.14). Using (3.20), we obtain
ω
n
= a
1
ν
1
·a
2
ν
2
= e
n
(
λ
1
+λ
2
)
ω
0
.
It is easy to see that for conservative mappings, which preserve the phase volume,
λ
1
+ λ
2
= 0. In such systems, one of the Lyapunov exponents is positive and the
other is negative: λ
2
=−λ
1
. Thus, the presence of chaos in such systems is deter-
mined by the maximum positive Lyapunov exponent. We should note that there is a
divergence of close trajectories in one direction and a convergence in the other.
For dissipative dynamical mappings λ
1
+ λ
2
< 0. Therefore, at least one Lya-
punov exponent is negative.
In phase spaces of higher dimensions the situation is analogous to the two-
dimensional phase space example. It is likewise possible to determine the Lyapunov
exponents (their number coincides with the phase space dimensionality), and the
maximum positive Lyapunov exponent will also give a quantitative characteristic of
the chaoticity measure in multi-dimensional cases.
Example 3.2. Calculating the Lyapunov exponent for the tent mapping
x
n+1
=
2rx
n
, if 0 ≤ x
n
≤
1
2
2r
(
1 − x
n
)
, if
1
2
< x
n
≤ 1
. (3.21)
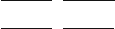
This is a continuous nonlinear mapping with the phase space
[
0, 1
]
. A graph view is
presented in Fig. 3.6.
It is easy to see that
f
(
x
)
= 2r and it does not depend on the position of x
n
.
Accordingly, using the definition (3.12), we obtain
λ = lim
n→∞
1
n
n−1
k=0
ln 2r = lim
n→∞
n ln 2r
n
= ln 2r .
30 3 Main Features of Chaotic Systems
Fig. 3.6 Graphviewoftent
mapping
0.6
0.4
0.2
0
0.80.60.40.20
x
n
x
n+1
r
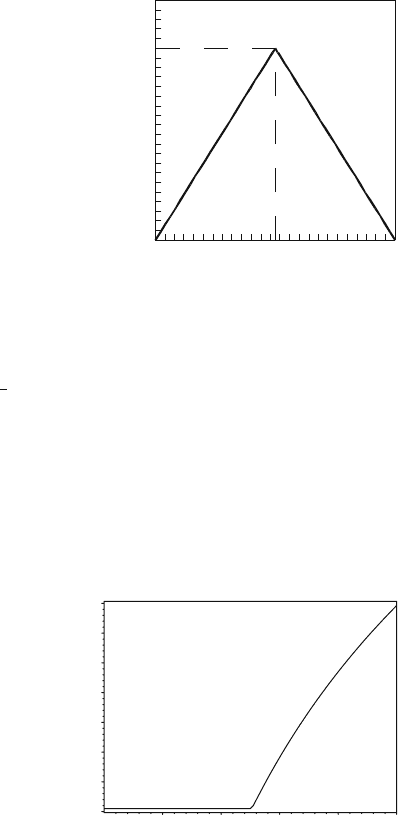
Thus, the Lyapunov exponent for that mapping is λ = ln 2r. Therefore, chaotic
behavior in that mapping will be observed at λ>0orat2r > 1. The transition to a
chaotic regime bears a resemblance to the characteristic features of phase transitions
(see Fig. 3.7). So at r < r
c
≡
1
2
the chaotic phase is absent, while at r > r
c
it
appears. If we consider the positive Lyapunov exponent as a parameter of order,
then near the phase transition r
>
∼
r
c
it changes according to the power law
λ ∼
(
r −r
c
)
β
,
the same way as in phase transitions. The critical index is β = 1.
Fig. 3.7 Dependence of the
order parameter for the tent
mapping on the mapping
parameter
λ
r
r
c
0
It should be noted that the value of the Lyapunov exponent is conserved at vari-
able transformations in dynamical systems. This can be ascertained if one considers
the mapping
x
n+1
= f
(
x
n
)
(3.22)
and the mapping
y
n+1
= g
(
y
n
)
, (3.23)
3.3 Lyapunov’s Exponent 31
which are obtained by the transition to new variables y
n
= h
(
x
n
)
with function
h
(
x
)
= 0 in the phase space of the mapping (3.22). The Lyapunov exponent for the
mapping (3.22) is determined by the following
λ
f
=
1
n
n−1
i=0
ln
f
(
x
i
)
. (3.24)
For the mapping (3.23)
λ
g
=
1
n
n−1
i=0
ln
g
(
y
i
)
. (3.25)
Let us make a transformation of variables y
i
= h
(
x
i
)
in the relation (3.25). We
account that
dy
n+1
dy
n
= g
(
y
n
)
dx
n+1
dx
n
= f
(
x
n
)
,
and dy
n
= h
(
x
n
)
dx
n
. Using these relations we obtain
g
(
y
n
)
=
h
(
x
n+1
)
h
(
x
n
)
f
(
x
n
)
.
Then the Lyapunov exponent (3.25) is transformed to the form
λ
g
=
1
n
n−1
i=0
ln
f
(
x
i
)
+ln
h
(
x
i+1
)
h
(
x
i
)
.
Now it follows that
λ
g
= λ
f
+
1
n
ln
h
(
x
n
)
h
(
x
0
)
.
At n →∞the latter contribution disappears. Thus, the value of the Lyapunov
exponent is conserved at geometrical transformations of variables.
In conclusion, let us cite without proof several useful properties of the Lyapunov
exponent. First of all, considering all the Lyapunov exponents (and not only the
maximum positive one), it is possible to analyze the global spectrum of the Lya-
punov exponents. In systems with n degrees of freedom their number is exactly n.
Values of the exponents can be ordered
λ
1
λ
2
··· λ
n
.
32 3 Main Features of Chaotic Systems
Naturally, among these there is an exponent that characterizes the deviation along
the trajectory. This exponent is always equal to zero if the trajectory does not ter-
minate in a singular point. For Hamiltonian systems with even-dimensional phase
space the Lyapunov exponents have additional symmetry. For any Lyapunov expo-
nent λ
i
there always exists an exponent λ
j
=−λ
i
. Therefore, in Hamiltonian
systems at least two Lyapunov exponents turn to zero. Of course for integrable
Hamiltonian systems all Lyapunov exponents are zeros.
For any dynamical system, the sum of all the Lyapunov exponents coincides with
the divergence of the vector field averaged along the trajectory. This can be under-
stood from the very meaning of the Lyapunov exponents, which characterize the
divergence of trajectories along some directions, and therefore, the volume variation
divV=
n
i=1
λ
i
.
This means that for dissipative systems their sum is negative, and for conservative
ones, it equals zero.
The Lyapunov exponents are important not only as a chaoticity criterion for the
systems, but they can serve as a useful tool to analyze the types of limit regimes
or attractors. Omitting the one-dimensional case, let us consider as an example the
attractors of two-dimensional systems. In such systems there exist only stable points
and limit cycles. The Lyapunov exponents in the former case (λ
1
λ
2
) = (−, −)are
both negative, and in the latter case (λ
1
λ
2
) = (−, 0). In three-dimensional systems
there are many more types of attractors.
• Stable node, or focus: (λ
1
,λ
2
,λ
3
) = (−, −, −)
• Stable limit cycles: (λ
1
,λ
2
,λ
3
) = (−, −, 0)
• Stable torus: (λ
1
,λ
2
,λ
3
) = (−, 0, 0)
• Strange attractor: (λ
1
,λ
2
,λ
3
) = (−, 0, +)
The latter limit regime will be discussed in the following sections.
3.4 Invariant Measure
In dynamical systems with chaotic behavior one can try to develop a statistical
theory, an important element of which is the notion of invariant density. Let us
introduce a function which characterizes the density of initial conditions, or more
exactly, probability density of initial conditions P
0
(
x
)
. The probability dw of an ini-
tial condition to fall in the interval
[
x
0
, x
0
+dx
0
]
is by definition dw = P
0
(
x
0
)
dx
0
.
If the dynamics of our system is defined by the mapping
x
n+1
= f
(
x
n
)
, (3.26)

3.4 Invariant Measure 33
then it is possible to determine the time transformation law for the above density. In
order to do that, one should use conservation probability during the evolution of our
system. Then in one time step the probability transformation is determined by the
equation
P
1
(
x
)
=
Ω
P
0
(
y
)
δ
(
x − f
(
y
))
dy. (3.27)
It is clear that this equation will preserve its form for any time stage of the evolution.
Therefore, let us formulate this in a more general form
P
n+1
(
x
)
=
Ω
P
n
(
y
)
δ
(
x − f
(
y
))
dy, (3.28)
where Ω is the phase space of the dynamical system or of the mapping (3.26),
and P
n
(
x
)
is the probability density on the n th time step. Equation (3.28), which
describes the temporal evolution of the probability density, is called the Frobenius–
Peron equation. This equation can be written in another form. Using the well-known
property of the δ-function
δ
(
x − f
(
g
))
=
i
δ
(
y − y
i
)
|
f
(
y
i
)
|
, (3.29)
where y
i
is the solution of the equation x − f
(
y
i
)
= 0. The summation is performed
over all the roots. Using the relation (3.29), we integrate in Eq. (3.28)
P
n+1
(
x
)
=
i
P
n
(
y
i
(
x
))
|
f
(
y
i
(
x
))
|
. (3.30)
In fact, Eq. (3.28) is transformed into a functional equation. Another useful form of
the Frobenius–Perron equation is obtained with help of the Fourier transform of the
δ-function and has the following form
P
n+1
(
x
)
=
i
P
n
(
y
i
)
e
−λ
i
(
y
i
)
, (3.31)
where λ
(
y
i
)
= ln
f
(
y
i
)
is the characteristic quantity, or local Lyapunov expo-
nent. This equation demonstrates the role of chaoticity in the probability density
evolution.
In the evolutionary process the distribution function P
n
(
x
)
can come to a station-
ary state, the role of which is similar to equilibrium states in statistical physics. Then
the dependence on time n disappears and P
n
(
x
)
= P
(
x
)
. This stationary probability
density is called invariant and it is determined by the equation