Богословский С.В. Дорофеев А.Д. Динамика полета летательных аппаратов
Подождите немного. Документ загружается.

31
Вращение ЛА по крену может вызываться не только отклонением
органов управления креном, но и отклонением органов управления рыс-
канием. Отклонение органов управления рысканием приводит к воз-
никновению угла скольжения, который вызывает появление момента
крена.
Таким образом, при боковом движении необходимо определять сле-
дующие балансировочные кривые:
– балансировочные кривые отклонений органов управления креном
и рысканием по скорости в прямолинейном полете без крена и сколь-
жения;
– балансировочные кривые по перегрузке на заданной скорости при
криволинейном полете в вертикальной плоскости без крена и скольже-
ния (или при полете с креном без скольжения в горизонтальной плоско-
сти – при вираже);
– балансирово чные кривые в прямо линейно м полете со ск о льжением ;
– ба лансировочные кривые органов управления креном по угловой
скорости крена на различных скоростях полета;
– ба лансировочные кривые органов управления рыскания по угло-
вой скорости крена на различных скоростях полета.
В случае полета со скольжением задача заключается в определении
балансировочных значений γ, δ
э
и δ
н
, обесп ечивающих прямой полет с
заданным углом скольжения (или, что то же с амое, при заданном посто-
янном значении скорости бокового ветра). Условия равновесия момен-
тов относительно осей OX и OY записываются
э
н
эн
0;
xx x x
MM M M
δ
δ
β
=β+ δ+ δ=
н
н
0.
yy y
MM M
δ
β
=β+ δ=
Из по следних выражений можно получить значения балансировоч-
ных углов отклонения руля направления и элеронов
н
н
;
y
y
m
m
β
δ
δ=− β
н
ээн
э
.
xy
x
xxy
mm
m
mmm
δ
β
β
δδδ
δ=− −
β

32
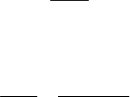
Равновесие сил в проекции на поперечную ось OZ достигается на-
кренением ЛА в сторону скольжения (рис. 8, а и б); при этом подъемная
сила должна уравновешивать проекцию силы тяжести на нормальную
ось OY
н
н
sin 0;GZZ
δ
β
γ+ β+ δ =
cos .
y
GYCqSγ= =
(Y
a
+Psinα)cosγ
G
V
P
β
x
a
x
Траектория
центра тяжести
Z
a
X
a
Y
a
+Psinα
(Y
a
+Psinα)sinγ
Рис. 8. Равновесие сил в боковой плоскости
Последние выражения позволяют определить балансировочный угол
крена
н
н
б
1
.
y
zz
y
y
m
tg C C
C
m
β
δ
β
δ
γ
≈
γ
=− −
β
Значения мер ст атической боковой управляемости определяются как
приращения угла β на единицу углов отклонения органов бокового уп-
равления. При балансировочном режиме полета
а)
б)

33
э
нн
нн
нэ
бб
;.
yxy
y
xy x y
mmm
m
mm m m
δ
δδ
βδδ
ββ
ββ
=− =−
δδ
−
Выражение
н
н
б
const
y
y
zz
y
C
m
CC
m
β
δ
β
δ
β
=− ≈
γ
−
определяет вынужденное значение угла крена ЛА при заданном значе-
нии угла скольжения на единицу его изменения.
δ
э
β
δ
э
δ
н
δ
н
ω
x
ω
x
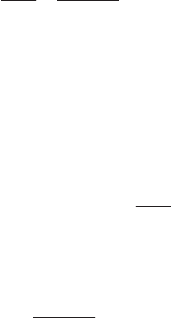
Рис. 9. Балансировочные диаграммы
по углу скольжения и угловой скорости крена
По результатам расчетов δ
н.б
, δ
э.б
могут быть по строены ба лансиро-
вочные диаграммы (рис. 9, а, б и в), характеризующие свойства стати-
ческой управляемости ЛА. Балансировочные кривые по угловой скоро-
сти крена при постоянном угле скольжения показаны на рис. 9.
а)
б)
в)
34
3. ОСНОВНЫЕ СВЕДЕНИЯ
ОБ УСТОЙЧИВОСТИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
3.1. Свойство устойчивости движения
летательных аппаратов
Действительные траектории ЛА всегда отличаются от теоретических
(расчетных), отвечающих конкретным уравнениям движения и за-
данным начальным условиям. Это определяются не только тем, что
динамические свойства ЛА описываются уравнениями лишь прибли-
женно, но и воздействием на ЛА случайных аэродинамических сил,
вызванных турбулентностью атмос феры, а также отличием началь-
ных условий и математиче ской модели от действительных. Если воз-
мущающие влияния малы, то действительные (возмущенные) траек-
тории проходят вблизи невозмущенной теоретиче ской. В этом слу-
чае кинематические параметры возмущенной траектории (V(t), θ(t),
…, ω
z
(t)) можно представить в виде сум м ы их значений в невозму-
щенном движении (V*(t), θ*(t), …, ω
z
*(t)) и отклонений или вариа-
ций этих параметров (∆V(t), ∆θ(t), …, ∆ω
z
(t)) от невозмущенных
V( ) V*( ) V( );
*;
*.
ttt=+∆
θ= θ + ∆θ
ω= ω + ∆ω
#
(11)
Допущение о малости отклонений параметров, характеризующих
движение ЛА относительно невозмущенной траектории, позволяет си-
стему нелинейных дифференциальных уравнений движения свести к
системе линейных дифференциальных уравнений относительно этих
отклонений, которая может быть аналитически проинтегрирована.
35
Общее решение однофазной системы (соответствует закреплен-
ным органам управления ∆δ
в
= ∆δ
н
= ∆δ
э
= 0) описывает свободное
или собственное движение ЛА и характеризует динамиче ское свой-
ство ЛА – устойчивость движения. Понятие устойчивости ЛА свя-
зывается с тремя типами изменения приращений ∆V(t), ∆θ(t), …,
∆ω
z
(t). В первом случае при неограниченном возрастании времени
возникшие отклонения парамет ров (в некоторый момент времени,
когда переста ла действовать возмущающая сила) ст ремятся к нулю –
“затухают”, движение ЛА называют устойчивым. Во втором – при-
ращения парамет ров не затухают, но и не возрастают – движение ЛА
называют нейтральным. Наконец, в по следнем случае все прираще-
ния с течением времени неограниченно возрастают – движение ЛА
называют неустойчивым.
Аналогичное определение устойчивости применяется и практичес-
ки. Так, например, движение самолета, пилотируемого летчиком, на-
зывается устойчивым, если самолет обладает способностью самостоя-
тельно (без вмешательства летчика и маневров рулями) возвращаться к
исходному режиму полета после прекращения действия возмущений.
Различают продольную и боковую устойчивость. Считают, что ЛА
обладает продольной устойчиво стью, если с течением времени зату -
хают приращения продольных параметров (∆V(t), ∆θ(t), ∆ϑ, ∆α, ∆ω
z
(t)),
и боковой, если затуха ют приращения боковых параметров.
Ранее указывалось, что статическая устойчивость ЛА определяет-
ся направлением его движения к исходному режиму в первый мо-
мент по сле прекращения действия возмущения. Однако это условие
еще не является гарантией возвращения ЛА к исходному режиму.
Можно представить себе, например, что ЛА будет сов ершать колеба-
ния около исходного положения равнове сия, причем, эти колебания
со временем будут возрастать. От сюда следует, что так называемая
“ст атическая устойчивость” ЛА есть необходимое, но недо статочное
условие действительной, или динамиче ской устойчивости, сужде-
ние о которой можно получить, только изучая ве сь проце сс движе-
ния ЛА после возмущения.
3.2. Линеаризация уравнений движения
Аналитические методы исследования дифференциальных уравнений
хорошо разработаны только для систем линейных дифференциальных

36
уравнений. Поэтому полученная система уравнений обычно линеари-
зуется. Для этого используется разложение нелинейных функций в ряд
Тейлора с удержанием первых двух членов ряда.
Поскольку вариации геометрических параметров считаются ма-
лыми величинами, по стольку силы и моменты, действующие на ЛА,
могут быть представлены рядами Тейлора по степеням приращений
этих параметров при ограничении только членами первого порядка
малости.
Из теории и эксперимента известно, что силы и моменты практичес-
ки зависят от определенных комбинаций параметров движения
X=X(V, H , α, β, δ
в
, δ
н
); M
x
= M
x
(V, H , α, β, ω
x
, ω
y
, ω
z
, δ
э
, δ
н
);
Y=Y(V, H , α, δ
в
); M
y
= M
y
(V, H , β, ω
x
, ω
y
,
н
,βδ
""
, δ
н
);
Z=Z(V, H , β, δ
н
); M
z
= M
z
(V, H, α, ω
z
,
в
,αδ
"
"
, δ
в
);
P = P(V, H , α, δ
д.в
).
Эти зависимости можно представить себе как кривые в многомер-
ном пространстве F
i
(x) координат x = (x
i
), причем по одной из осей
откладываются значения функции F
i
, а по остальным – x
i
. Если через
интересующую нас точку этой многомерной кривой можно провести
гладкую поверхность, то соответствующую функцию можно предста-
вить в виде ряда Тейлора
2
10
111
1
(, , ) ,
2
nnn
ii
ini j jk
jjk
jjk
FF
Fx x F x xx
xxx
===
∂∂
=+ + +
∂∂∂
∑∑∑
$$
где производные берутся в заданной точке многомерной кривой, а зна-
чения x
j
и x
k
соответст вуют рассматриваемому моменту времени t.
Удерживая только первые два члена ряда Тейлора, получают линеа-
ризованные модели сил и моментов. Удержание первых трех членов
ряда Тейлора привело бы к необходимости рассмотрения билинейных
моделей сил и моментов. В данном же пособии рассматриваются толь-
ко методы анализа линейных моделей динамики полета.
Если пренебречь влиянием отклонения высоты ∆H на приращения
силы тяги, аэродинамических сил и моментов, а также не рассматри-
вать влияния на возмущенное движение отклонений режима работы
двигателя, то в соответствии с (11) можно получить

37
вн
в
н
в
нэ
** * вн
** *
** * в
*
** н
**
* в
***
** * *
нэ
**
*
***
;
;
;
;
y
xz
x
V
V
V
V
xx x x x
xxxxyxz
xx
V
yy y y y
XX XVX X X X
YYY VY Y
ZZ Z VZ Z
MM MVM M
MM M M
MM
MM MVM M
δδ
αβ
δ
α
δ
β
αδ
ω
βω ω
δδ
βω
=+∆+∆α+∆
β
+∆δ+∆δ
=+∆+∆α+ ∆δ
=+∆+∆β+ ∆δ
=+∆+∆α+∆δ+
+ ∆β+ ∆ω + ∆ω + ∆ω +
+∆δ+∆δ
=+∆+∆β+ ∆
нн
вв
*
нн
**
*
*** *
вв
**
**
;
;
,
z
xy
yy
V
zz z z z zz
zz
V
M
MM
MM MVM M M
MM
PPPV
β
δδ
αω α
δδ
ω+ ∆
β
+
+∆δ+∆δ
= + ∆ + ∆α+ ∆ω + ∆α+
+∆δ+∆δ
=+∆
"
"
"
"
"
"
"
"
(12)
где
*
*
V
X
X
V
∂
=
∂
,
*
*
X
X
α
∂
=
∂α
и т. п. – частные производные по V, α и
другим параметрам, а индекс
*
означает, что соответствующие величи-
ны вычисляются для исходного режима полет а.
Чтобы получить линейные уравнения движения в вариациях в дос-
таточно простом виде полагают, что в невозмущенном движении боко-
вые кинематические параметры ψ
*
, β
*
, γ
*
, ω
x*
, ω
y*
, отклонения органов
управления боковыми движениями δ
н*
, δ
э*
, а также производные по
времени от продольных параметров
***в *
,,,
z
ω≈ϑαδθ
"""
"
являются настоль-
ко малыми, что можно пренебречь их произведениями и произведения-
ми этих параметров на другие малые величины.
Мето дику линеаризации можно показать на примере линеаризации урав-
нения сил в проекции на скоростную ось скоростной системы к оор дина т
cos cos sin .
dV
mP XG
dt
=αβ−−θ
(13)
В соответствии с принятыми допущениями
** *
** *
cos cos cos( )cos( ) (cos cos
sin sin )(cos cos sin sin ).
α
β
=α+∆α
β
+∆
β
=α∆α−
−α ∆α β ∆β−β ∆β
38
Вследствие малости углов можно написать
**
cos cos cos cos 1; sin ; sin ,
α ≈ ∆α≈ β ≈ ∆β= ∆α≈∆α ∆β≈∆β
где ∆α, ∆β измеряется в радианах.
Тогда
**
** **
cos cos (1 sin )(1 sin )
1 sin sin sin sin .
α
β
≈− α∆α−
β
∆
β
=
= − β ∆β− α ∆α+ α β ∆α∆β
Отбрасывая член второго порядка малости, содержащий произведе-
ние ∆α ∆β, можно получить
**
cos cos 1 sin sin .
αβ=−β∆β−α∆α
(14)
Подста вляя (12) и (14) в (13), можно записать
()
()
()
()
вн
*
** * *
** * вн
** *
**
()
1sin sin
sin cos .
V
V
dV
dV
mPPV
dt dt
XXVX X X X
G
δδ
αβ
∆
+ = + ∆ − β ∆β− α ∆α −
− + ∆ + ∆α+ ∆β+ ∆δ + ∆δ −
−θ+∆θθ
Но с учетом (13)
*
** *
sin ,
dV
mPXG
dt
=− − θ
следовательно,
()( )
()
вн
** ***
** вн *
** *
()
sin
sin cos .
VV
dV
mPXVPX
dt
PXXXG
α
δδ
β
∆
=−∆− α+∆α−
− β + ∆β− ∆δ − ∆δ − ⋅ θ ∆θ
Аналогичным образом линеаризуются и остальные динамические
уравнения движения ЛА. В результате полученная система уравнений
представляет собой систему линейных дифференциальных уравнений
возмущенного движения ЛА, в которые в качестве неизвестных функ-
ций времени входят приращения параметров движения.

39
3.3. Разделение возмущенного движения
на продольное и боковое
Полученная система линейных дифференциальных уравнений имеет не
менее, чем двенадцатый порядок (три уравнения сил второго порядка и
три уравнения момент ов второго порядка). Поскольку нек о т орые аналити-
ческие мето ды исследования предполагаю т возмо жность нахождения ана-
литических выражений для к орней характеристических уравнений, постоль-
ку возник ает необ ходимость дальнейшей редукции (упрощения) исхо дной
системы дифференциальных уравнений – сведения ее к неск ольким систе-
мам уравнений не более, чем пятого порядка.
Применительно к рассматриваемому примеру такая редукция может
быть произведена на основе допущения о малости боковых парамет-
ров. При этом полагают
*
cos cos 1 sin ,
αβ=−α∆α
и учитывая, что боковые величины
н
н
**
,XX
δ
β
∆β ∆δ
пренебрежимо малы,
получают
()
()
()
()
в
*
** *
** * в **
*
()
1sin
sin cos .
V
V
dV
dV
mPPV
dt dt
XXVX X G
δ
α
∆
+=+∆−∆αα−
− + ∆ + ∆α+ ∆δ − θ +∆θ θ
Окончательно
()( )
в
** ***
* в
*
()
sin
cos .
VV
dV
mPXVPX
dt
GX
α
δ
∆
=−∆− α+∆α−
−θ∆θ−∆δ
Полученная система дифференциальных уравнений возмущенного
движения ЛА состоит из двух независимых систем. Одна из них после
введения так называемых динамических коэффициентов a
ij
(i – номер
уравнения; j – номер приращения в табл. 1).
Таблица 1
№ переменной, a
ij
1234
Обозначение переменной V
αθω
z

40
С учетом кинематического соотношения ∆α + ∆θ –∆ϑ = 0 система
уравнений продольного движения при программном управления рулем
высоты ∆δ
в
принимает вид
11 12 13 11 в
()
;
dV
aVa a b
dt
∆
+ ∆ + ∆α+ ∆θ = − ∆δ
21 22 23 21 в
()
;
z
d
aVa a b
dt
∆α
+ ∆ + ∆α+ ∆θ−∆ω = ∆δ
31 32 33 31 в
()
;
d
aVa a b p
dt
∆θ
−∆−∆α−∆θ=∆δ
''
41 42 31 42 42 32
''
42 33 44 42
''
в
41 42 31 в 41
()
()( )
()
()
() ,
z
z
d
aaaVaaa
dt
aa a a
d
bab b
dt
∆ω
+− ∆+− ∆α−
−∆θ++∆ω=
∆δ
=− ∆δ+
(15)
где
в
2
2
** *
11 12 13 11
cos
;;;
22
V
xx
SV SV G
SV
P
aacabc
mm m m m
δ
α
ρρ θ
ρ
=− + = = =
;
*
31
*
sin
;
VV
y
PcQ
a
mV
α+
=
*
32
*
;
y
PcQ
a
mV
α
+
=
*
33
*
sin
;
g
a
V
θ
=
в
31
*
;
y
cQ
b
mV
δ
=
21 31
;aa=
22 32
;aa=
23 33
;aa=
21 31
;bb=
41
;
V
zA
z
mQb
a
J
=−
42
;
zA
z
mQb
a
J
α
=−
'
42
;
zA
z
mQb
a
J
α
=−
"
44
;
z
zA
z
mQb
a
J
ω
=−
в
41
;
zA
z
mQb
b
J
δ
=
в
'
41
.
zA
z
mQb
b
J
δ
=
"
Коэффициенты a
ij
характеризуют динамические свойства ЛА. Так,
например, коэффициент 44
z
zA
z
mQb
a
J
ω
=−
характеризует аэродинамичес-
кое демпфирование ЛА; коэффициент
42
zA
z
mQb
a
J
α
=−
– статическую